HONEYWELLDCS操作手册
honeywell面板操作手册
Dsadddddddddddd DsadaDsadaDsadadSadadsa DsadadaDsada键盘操作1.用户登录当用户需要操作矩阵时,首先要做的就是登录矩阵键盘。
按键盘上“29”(Login登录),输入ID(默认为1),按“17”(Ent确认键),输入密码(默认为0),按“17”(Ent确认键)。
此时已经登录到了矩阵键盘的操作界面,现在可以进行相应的操作。
2.摄像机切换操作操作员已经登录后,可以通过按下所需的模式功能键来更改运行模式。
Login (Logout)(登录(注销))Camera(摄像机)Monitor(监视器)先选择监视器,再选择摄像机。
当处于 "Camera"(摄像机)模式时,按下数字小键盘上的相应数字,然后按 Enter(回车)键来选择摄像机值。
所选择的摄像机值被切换为当前选择的监视器。
可使用“11键”(下一个)和“7键”(上一个)键在系统里各种摄像机之间前后移动,还可使用“23号键”旋转前后切换摄像机。
3.监视器切换操作当处于 " Monitor "(监视器)模式时,按下数字小键盘上的相应数字,然后按 Enter (回车)键来选择监视器值。
如果在该输入键后按下数字键、清除或后退,则在按下监视器键(输入监视器模式)后控制器将自动返回到摄像机模式下。
4.摄像机预置位定义和调用存储预置位如果 PTZ 装置配备了反馈系统,则可以存储并调用 PTZ 预设位置。
如要存储一个位置,则移动 PTZ 直至覆盖所需的镜头。
按下“9号键”或“Set5号键”,使用数字小键盘输入所需的预设编号,然后按下 "Enter"(回车)键来存储该编号的位置。
调用预置位如要调用先前存储的位置,则按下 "View13号键"按钮,使用数字小键盘输入所需的预设编号,然后按下 "Enter"(回车)键来调用预设项。
Honeywell-DCS操作-培训讲解学习

Honeywell DCS 操作培训绪论从一个完整的Shutdown 上装载系统Honeywell 组合键盘使用本地窗口状态工具条操作入门操作On Off 控制点GUS R600 报警器报警–系统状态使用Trend 显示工艺报警响应操作HPM 程序 (可选)其它•工具•命令•JP/SOP附录X_Plant 缩写列表同Merlion 的接口逻辑符号Honeywell 缩写描述Honeywell 手册报警和状态指示HPM参数参考•Honeywell TPS 综述•HPM 控制功能概观•X6 DCS•DCS 设备布局图•DCS 标签编号系统•点类型•Honeywell DCS系统操作简介 (参考 : HP12500) •X6 Honeywell DCS 系统操作•工艺操作Honeywell TPS 综述•全球用户工作站 (GUS)*DCS 操作控制台*IS Merlion控制台*Windows NT*通过 LCNP 处理机同LCN通信*本地 window⇒操作者和工程师职责(报警系统/控制台状态等等)⇒每个 GUS都有一个*其它windows (显示, 微软官能度)*显示创建者, 站点创建者, 安全综述 (工程功能)*遥控功能•高性能工艺管理(HPM)*M68040 平台⇒通信/控制处理器(冗余)⇒I/O 接口处理器(冗余)*获取数据和控制功能, 对等通信*点数据*顺序控制语言(CL), 联锁操作*每秒钟800个处理单元(PU) (控制,离散逻辑,次序组等等)。
1个PID 控制器使用1个 PU。
*培训系统I/O 模拟。
•通信网络*本地控制网络(LCN)⇒操作网络(历史纪录,软件装载,访问硬盘等等)⇒5兆/秒⇒令牌转交接受协议,每个节点令牌的通过时间大约为30秒。
⇒A和B 电缆线上同时广播。
⇒最多支持64 个节点,网络最远距离为300米。
⇒用于 GUS/PLNM/AM/AxM/HM/NIM/APPNODE*全球控制网络(UCN)⇒工艺网络 (SP, OP, PV, range, alarm generation)⇒5兆/秒⇒令牌总线网络⇒用于HPM•网络接口模块(NIM)*UCN 接到LCN*冗余*使LCN 和 UCN同步*最多支持 32 冗余设备•工厂网络模块 (AppNode)*LCN和以太网 (PIN)的接口*为了下载 SOC 等等•应用模块 (AM / AxM)*运算控制器的补充*管理控制*更先进的计算和控制策略*控制SOC下载语言程序等等 c•历史模块 (HM)*存储系统软件和应用文件(例如硬盘)*存储连续的工艺历史和事件日志*存储图表,节点操作软件,CL 程序HPM 控制功能概观典型的控制回路 :DCS 标签编号系统8 个特征P1****** : polymer POF line 1 tag(P2****** : polymer POF line 2 tag) C1****** : polymer, common areaSA01**TC : spinning machine A cell 01 temperature controller, ** loop no. S1****** : spinning common area (e.g. aspiration gas) R1****** : solvent recovery area P19***** : site specific, polymer areaC19***** : site specific, polymer common area R19***** : site specific, solvent recovery area*G *T analog input (FULL point form)模拟全点analog input (COMPONENT point form) 模拟半点*V *X *R *Z analog output (control valve)模拟输出(控制阀) analog output (micro-motion flow control valve) 模拟输出(流量控制阀)analog output (heater control output) 模拟输出(热量控制输出)analog output (drive control output) 模拟输出(热量控制输出)*C control (控制) FQ totaling (累加器)HC hand controlSC speed control (速度控制) XG Analyzer (分析器) *A digital alarm (数字警报) RC ratio control (比率控制) C E DO calculated value (计算值) digital input (数字输入) digital output (数字输出)PB digital composite / device control 数字组合/控制点HSdigital composite / device control 数字组合/控制点E1SV E2DISolonidPBAPoint Type (点的类型)Point Type 点的类型 Descriptor(描述)Tag Name 点名 Tag Descriptor 点的描述 ANALOG INPUT 模拟输入Perform input processing on all field I/O.(P10312PG) MDI SUPP TK VNT PRESSANALOG OUTPUT 模拟输出Perform output processing on all field I/O. (P10319PV) MDI SUPP PRESS CTRL VLV DIGITAL INPUT 数字输入Perform input processing on all field I/O. (P10315E) MDI SUPP PMP START/STOP DIGITAL OUTPUT 数字输出Perform output processing on all field I/O. (P10315DO) MDI SUPP PMP RUN REGULATORY PV 常规PVProvide an easy to use configurable approach for implementing PV calculations and compensation functions.(P10317PG) MDI FLTR DP REGULATORYCONTROL 常规控制 Perform standard control functions by executing the algorithms that have been configured.(P10319PC) MDI SUPP PRESS CTRLDIGITAL COMPOSITE 数字组合A multi-input/multi-output point provides an interface to discrete devices such as motors, pumps, solenoid valves, and motor-operated valves. It provides built-in structures for handling interlocks, and supports display of the interlock conditions in group, detail, and graphic displays.(P10321HS)MDI ONL/RECIRC VLVDEVICE CONTROL 设备控制 Provide a way to manipulate a device (e.g. motor) and to view the strategy through a single point (help the operator to graphically trace the source of an interlock condition.(P10315PB) MDI SUPP PMPFLAG 状态点A 2 state (On and Off) point is used for storing a Boolean value. The value can be supplied by the operator, sequence program, another point output, etc.(P10322FL) MDI/GLY ONL/RECIRCNUMERIC 数值点 Data point used to store numeric values that can be used for batch/recipe operations, or to store the intermediate results of calculations.(P1CPRCLM) CP RATE CHANGE +/-PROCESS MODULE 过程模块 The resource for execution of user-created programs (CL). (P1CPRTCH) CAPPING RATE CHANGEARRAY 数组点 Provide access to HPM box global variables, or external data from/to serial interface devices.(P1MWTOP) TOP MW ONL DATA TIMER 时间点 Timer data point allows the operator and the sequence program to time the process events.(P1MWRCTM) MW SILO RATE CHANGE TMR LOGIC 逻辑点 Provide a configurable mix of logic capability that provides the basis for integrated logic functions.(P1LOGA) MDI/GLY DIVERT VALVES STRING 字符串点Store descriptive text data, such as the brand name or model etc.--平台 (Point Form)"Full" point form includes alarm-related parameters and sometimes, some other miscellaneous parameters. This information is needed when the point is to be used as the primary operator interface to the point's data."Component" point form should be used for points that provide inputs to the "Full" point, and also for those points that handle the outputs from the "Full" points. Component" points should be used as part of the "Full" point that has been designated a primary operator interface point.NOTE: Full-point form cannot be assigned to DO (digital output) points; they are always component points. Stand-alone digital output points require using a digital composite point that has 0 (zero) inputs and 1 output.Example : Single-LoopExample :Mass FlowExample : Motor ControlHoneywell DCS 系统操作简介(参考: HP12500)登录•Alt-Ctl_+Del组合键用户名: gus密码:键操作•工程键盘•功能键•操作键•通过工程键盘(用于纺丝层)操作键•键锁•其它:*主菜单 (Poly/Spin/Recovery)*Recall tag/schematic name key ...*清屏*故障*Schematic Tagname Toggle*调出最新的图表*相关的显示*组*详述*示意图*标准*系统状态*CONS 状态 (单元显示 / 单元分配 /控制台报警状态/ 系统报警状态) *报警SUMM / UNIT ALM SUMM*MSG SUMM / MSG CONFM / MSG CLEAR*系统菜单⇒概要菜单⇒事件历史⇒组编辑显示 (391~400)显示•改变区域•节点描述•组•图表•详述•趋势改变方式•手动•自动•串联•程序, 包括CL 程序 (例如用于SOC, ...)信号处理•指示或调整控制(带有运算器)模拟/灵敏传感器•用于联锁和顺序控制的数字传感器•驱动通信的串行接口•PV 源选项*所有⇒自动⇒手动⇒SUB, 从程序输入⇒追踪*仅自动Point Exec State•Active•InactiveX6Honeywell DCS 系统操作控制台体系结构•GUS*Deskside GUS 用于纺丝层, ICR, 纺丝 3rd层和培训系统。
Honeywell DCS永久GROUP建立SOP

第三步:点击菜单栏里的Engineering然后选择下拉菜单的CMD MENU选项。
第四步:鼠标点击屏幕上SELECT AREA 进入下级菜单。
第四步:点击高亮键后显示如上图,选择一线并Enter,然后按键盘Ctrl+F9返回上级菜单。
第十步:点击菜单栏里的Engineering然后选择下拉菜单的CMD MENU选项。返回如上 图
第十二步:点击菜单中CONSOLE STATUS进行换取操作。
第十三步:上图鼠标点击AREA CNG 并选择01线 。
第十四步:选择DEFAULT SOURCE。
操作结束。
第五步:鼠标点击菜单中的GROUP选项,进入下级菜单。
第六步:单击GROUP UNMBER输入欲建立的GROUP代号(1-400见任意数字均可)并 ENTER。 第七步:输入Ctrl+F7读取GROUP信息,对不实点的数据进行修改。 第八步:输入欲建立的各点至1-8序列里,在YES/NO选项可选择是否在GROUP里显示曲
Honeywell_DCS_控制回路PID参数整定方法(推荐文档)

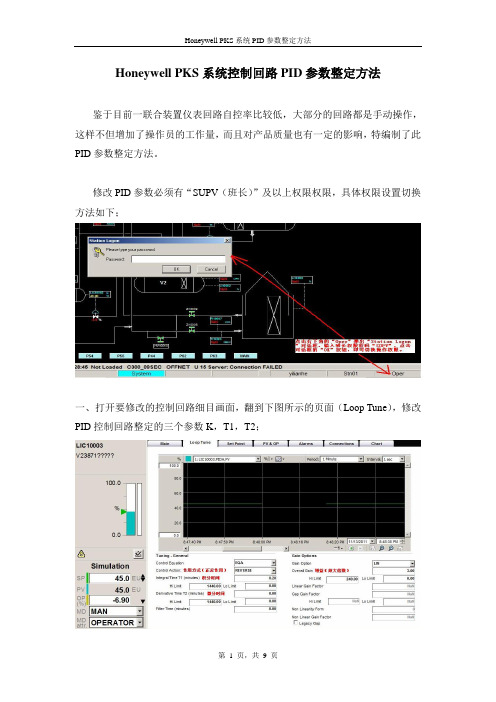
Honeywell PKS系统控制回路PID参数整定方法鉴于目前一联合装置仪表回路自控率比较低,大部分的回路都是手动操作,这样不但增加了操作员的工作量,而且对产品质量也有一定的影响,特编制了此PID参数整定方法。
修改PID参数必须有“SUPV(班长)”及以上权限权限,具体权限设置切换方法如下;一、打开要修改的控制回路细目画面,翻到下图所示的页面(Loop Tune),修改PID控制回路整定的三个参数K,T1,T2;二、PID参数代表的含义Control Action:控制器的作用方式,正作用(DIRECT),反作用(REVERSE);Overal Gain(K):比例增益(放大倍数),范围为0.0~240.0;T1:积分时间,范围为0.0~1440.0,单位为分钟,0.0代表没有积分作用;T2:微分时间,范围为0.0~1440.0,单位为分钟,0.0代表没有微分作用。
三、PID参数的作用(1)比例调节的特点:1、调节作用快,系统一出现偏差,调节器立即将偏差放大K倍输出; 2、系统存在余差。
K越小,过渡过程越平稳,但余差越大;K增大,余差将减小,但是不能完全消除余差,只能起到粗调作用,但是K过大,过渡过程易振荡,K太大时,就可能出现发散振荡。
(2)积分调节的特点:积分调节作用的输出变化与输入偏差的积分成正比,积分作用能消除余差,但降低了系统的稳定性,T1由大变小时,积分作用由弱到强,消除余差的能力由弱到强,只有消除偏差,输出才停止变化。
(3)微分调节的特点:微分调节的输出是与被调量的变化率成正比,在引入微分作用后能全面提高控制质量,但是微分作用太强,会引起控制阀时而全开时而全关,因此不能把T2取的太大,当T2由小到大变化时,微分作用由弱到强,对容量滞后有明显的作用,但是对纯滞后没有效果。
四、控制器的选择方法(1)P控制器的选择:它适用于控制通道滞后较小,负荷变化不大,允许被控量在一定范围内变化的系统;(2)PI控制器的选择:它适用于滞后较小,负荷变化不大,被控量不允许有余差的控制系统;(3)PID控制器的选择:它适用于负荷变化大,容量滞后较大,控制质量要求又很高的控制系统,比如温度控制系统。
DCS操作使用说明书

DCS操作使用说明书一、登录和启动Deltav操作(一)从系统运行时登录1、在操作员屏幕的顶部点击login 工具栏,Deltav login对话框打开;2、把鼠标指向User name区,点左键输入你的用户名;3、把鼠标指向密码区,点鼠标左键输入你的密码;安全起见,字符将以***来显示。
4、按左键点击OK完成。
(二)断电重启状态下登录1、打开监视器,监视器底部右边小灯变绿说明已打开,如没打开,按一下监视器底部的大按钮;2、打开主机电源启动主机,这个电源按钮通常在复位键的上边并且比复位键要大,不同的画面将在屏幕上出现,只有当屏幕上显示:Press CNTRL/ALT/DELETE to log ON前,不能动任何键;3、在键盘上,同时按下Ctrl和Alt键并保持,然后按下DELETE键(即三键同时按下)后,同时释放这三个键,画面进到用户名和密码对话框(这将登陆到Windows NT操作系统)4、把鼠标指向用户名区,点一下左键,输入你的用户名,把鼠标移到密码区,点击左键,小心的输入你的密码,安全起见,字符将以星号(***)显示;5、点击“OK”等待“Deltav Logon”对话框(打开);6、移动鼠标到用户名区,点左键,再输入你的用户名,OPERATOR;7、移动鼠标到密码区,点左键,然后输入你的密码,安全起见,字符将以星号显示;8、点击“OK”按钮(左键)“Flexlock”程序打开;9、点击“Operator Interface”启动“Deltav Operate”。
二、退出Deltav操作1、点击操作员屏幕上方的login 工具按钮,Deltav login 对话框打开。
2、点击Deltav对话框中log off 工具按钮。
三、从Delltav 系统中获取帮助所有Deltav Help都是在线的,这意味着这个帮助是一个电子版格式,并且只要点击一下鼠标即可实现,系统提供了三种帮助途径:工具按钮的帮助;在线帮助图书;Delltav操作程序自身帮助概述。
Honeywell_DCS_控制回路PID参数整定方法
Honeywell PKS系统控制回路PID参数整定方法鉴于目前一联合装置仪表回路自控率比较低,大部分的回路都是手动操作,这样不但增加了操作员的工作量,而且对产品质量也有一定的影响,特编制了此PID参数整定方法。
修改PID参数必须有“SUPV(班长)”及以上权限权限,具体权限设置切换方法如下;一、打开要修改的控制回路细目画面,翻到下图所示的页面(Loop Tune),修改PID控制回路整定的三个参数K,T1,T2;二、PID参数代表的含义Control Action:控制器的作用方式,正作用(DIRECT),反作用(REVERSE);Overal Gain(K):比例增益(放大倍数),范围为0.0~240.0;T1:积分时间,范围为0.0~1440.0,单位为分钟,0.0代表没有积分作用;T2:微分时间,范围为0.0~1440.0,单位为分钟,0.0代表没有微分作用。
三、PID参数的作用(1)比例调节的特点:1、调节作用快,系统一出现偏差,调节器立即将偏差放大K倍输出; 2、系统存在余差。
K越小,过渡过程越平稳,但余差越大;K增大,余差将减小,但是不能完全消除余差,只能起到粗调作用,但是K过大,过渡过程易振荡,K太大时,就可能出现发散振荡。
(2)积分调节的特点:积分调节作用的输出变化与输入偏差的积分成正比,积分作用能消除余差,但降低了系统的稳定性,T1由大变小时,积分作用由弱到强,消除余差的能力由弱到强,只有消除偏差,输出才停止变化。
(3)微分调节的特点:微分调节的输出是与被调量的变化率成正比,在引入微分作用后能全面提高控制质量,但是微分作用太强,会引起控制阀时而全开时而全关,因此不能把T2取的太大,当T2由小到大变化时,微分作用由弱到强,对容量滞后有明显的作用,但是对纯滞后没有效果。
四、控制器的选择方法(1)P控制器的选择:它适用于控制通道滞后较小,负荷变化不大,允许被控量在一定范围内变化的系统;(2)PI控制器的选择:它适用于滞后较小,负荷变化不大,被控量不允许有余差的控制系统;(3)PID控制器的选择:它适用于负荷变化大,容量滞后较大,控制质量要求又很高的控制系统,比如温度控制系统。
Honeywell-DCS操作-培训

Honeywell DCS 操作培训绪论从一个完整的Shutdown 上装载系统Honeywell 组合键盘使用本地窗口状态工具条操作入门操作On Off 控制点GUS R600 报警器报警–系统状态使用Trend 显示工艺报警响应操作HPM 程序 (可选)其它•工具•命令•JP/SOP附录X_Plant 缩写列表同Merlion 的接口逻辑符号Honeywell 缩写描述Honeywell 手册报警和状态指示HPM参数参考•Honeywell TPS 综述•HPM 控制功能概观•X6 DCS•DCS 设备布局图•DCS 标签编号系统•点类型•Honeywell DCS系统操作简介 (参考 : HP12500) •X6 Honeywell DCS 系统操作•工艺操作Honeywell TPS 综述•全球用户工作站 (GUS)*DCS 操作控制台*IS Merlion控制台*Windows NT*通过 LCNP 处理机同LCN通信*本地 window⇒操作者和工程师职责(报警系统/控制台状态等等)⇒每个 GUS都有一个*其它windows (显示, 微软官能度)*显示创建者, 站点创建者, 安全综述 (工程功能)*遥控功能•高性能工艺管理(HPM)*M68040 平台⇒通信/控制处理器(冗余)⇒I/O 接口处理器(冗余)*获取数据和控制功能, 对等通信*点数据*顺序控制语言(CL), 联锁操作*每秒钟800个处理单元(PU) (控制,离散逻辑,次序组等等)。
1个PID 控制器使用1个 PU。
*培训系统I/O 模拟。
•通信网络*本地控制网络(LCN)⇒操作网络(历史纪录,软件装载,访问硬盘等等)⇒5兆/秒⇒令牌转交接受协议,每个节点令牌的通过时间大约为30秒。
⇒A和B 电缆线上同时广播。
⇒最多支持64 个节点,网络最远距离为300米。
⇒用于 GUS/PLNM/AM/AxM/HM/NIM/APPNODE*全球控制网络(UCN)⇒工艺网络 (SP, OP, PV, range, alarm generation)⇒5兆/秒⇒令牌总线网络⇒用于HPM•网络接口模块(NIM)*UCN 接到LCN*冗余*使LCN 和 UCN同步*最多支持 32 冗余设备•工厂网络模块 (AppNode)*LCN和以太网 (PIN)的接口*为了下载 SOC 等等•应用模块 (AM / AxM)*运算控制器的补充*管理控制*更先进的计算和控制策略*控制SOC下载语言程序等等 c•历史模块 (HM)*存储系统软件和应用文件(例如硬盘)*存储连续的工艺历史和事件日志*存储图表,节点操作软件,CL 程序HPM 控制功能概观典型的控制回路 :DCS 标签编号系统8 个特征P1****** : polymer POF line 1 tag(P2****** : polymer POF line 2 tag) C1****** : polymer, common areaSA01**TC : spinning machine A cell 01 temperature controller, ** loop no. S1****** : spinning common area (e.g. aspiration gas) R1****** : solvent recovery area P19***** : site specific, polymer areaC19***** : site specific, polymer common area R19***** : site specific, solvent recovery area*G *T analog input (FULL point form)模拟全点analog input (COMPONENT point form) 模拟半点*V *X *R *Z analog output (control valve)模拟输出(控制阀) analog output (micro-motion flow control valve) 模拟输出(流量控制阀)analog output (heater control output) 模拟输出(热量控制输出)analog output (drive control output) 模拟输出(热量控制输出)*C control (控制) FQ totaling (累加器)HC hand controlSC speed control (速度控制) XG Analyzer (分析器) *A digital alarm (数字警报) RC ratio control (比率控制) C E DO calculated value (计算值) digital input (数字输入) digital output (数字输出)PB digital composite / device control 数字组合/控制点HSdigital composite / device control 数字组合/控制点E1SV E2PBAPoint Type (点的类型)Point Type 点的类型 Descriptor(描述)Tag Name 点名 Tag Descriptor 点的描述 ANALOG INPUT 模拟输入Perform input processing on all field I/O.(P10312PG) MDI SUPP TK VNT PRESSANALOG OUTPUT 模拟输出Perform output processing on all field I/O. (P10319PV) MDI SUPP PRESS CTRL VLV DIGITAL INPUT 数字输入Perform input processing on all field I/O. (P10315E) MDI SUPP PMP START/STOP DIGITAL OUTPUT 数字输出Perform output processing on all field I/O. (P10315DO) MDI SUPP PMP RUN REGULATORY PV 常规PVProvide an easy to use configurable approach for implementing PV calculations and compensation functions.(P10317PG) MDI FLTR DP REGULATORYCONTROL 常规控制 Perform standard control functions by executing the algorithms that have been configured.(P10319PC) MDI SUPP PRESS CTRLDIGITAL COMPOSITE 数字组合A multi-input/multi-output point provides an interface to discrete devices such as motors, pumps, solenoid valves, and motor-operated valves. It provides built-in structures for handling interlocks, and supports display of the interlock conditions in group, detail, and graphic displays.(P10321HS)MDI ONL/RECIRC VLVDEVICE CONTROL 设备控制 Provide a way to manipulate a device (e.g. motor) and to view the strategy through a single point (help the operator to graphically trace the source of an interlock condition.(P10315PB) MDI SUPP PMPFLAG 状态点A 2 state (On and Off) point is used for storing a Boolean value. The value can be supplied by the operator, sequence program, another point output, etc.(P10322FL) MDI/GLY ONL/RECIRCNUMERIC 数值点 Data point used to store numeric values that can be used for batch/recipe operations, or to store the intermediate results of calculations.(P1CPRCLM) CP RATE CHANGE +/-PROCESS MODULE 过程模块 The resource for execution of user-created programs (CL). (P1CPRTCH) CAPPING RATE CHANGEARRAY 数组点 Provide access to HPM box global variables, or external data from/to serial interface devices.(P1MWTOP) TOP MW ONL DATA TIMER 时间点 Timer data point allows the operator and the sequence program to time the process events.(P1MWRCTM) MW SILO RATE CHANGE TMR LOGIC 逻辑点 Provide a configurable mix of logic capability that provides the basis for integrated logic functions.(P1LOGA) MDI/GLY DIVERT VALVES STRING 字符串点Store descriptive text data, such as the brand name or model etc.--平台 (Point Form)"Full" point form includes alarm-related parameters and sometimes, some other miscellaneous parameters. This information is needed when the point is to be used as the primary operator interface to the point's data."Component" point form should be used for points that provide inputs to the "Full" point, and also for those points that handle the outputs from the "Full" points. Component" points should be used as part of the "Full" point that has been designated a primary operator interface point.NOTE: Full-point form cannot be assigned to DO (digital output) points; they are always component points. Stand-alone digital output points require using a digital composite point that has 0 (zero) inputs and 1 output.Example : Single-LoopExample :Mass FlowExample : Motor ControlHoneywell DCS 系统操作简介(参考: HP12500)登录•Alt-Ctl_+Del组合键用户名: gus密码:键操作•工程键盘•功能键•操作键•通过工程键盘(用于纺丝层)操作键•键锁•其它:*主菜单 (Poly/Spin/Recovery)*Recall tag/schematic name key ...*清屏*故障*Schematic Tagname Toggle*调出最新的图表*相关的显示*组*详述*示意图*标准*系统状态*CONS 状态 (单元显示 / 单元分配 /控制台报警状态/ 系统报警状态) *报警SUMM / UNIT ALM SUMM*MSG SUMM / MSG CONFM / MSG CLEAR*系统菜单⇒概要菜单⇒事件历史⇒组编辑显示 (391~400)显示•改变区域•节点描述•组•图表•详述•趋势改变方式•手动•自动•串联•程序, 包括CL 程序 (例如用于SOC, ...)信号处理•指示或调整控制(带有运算器)模拟/灵敏传感器•用于联锁和顺序控制的数字传感器•驱动通信的串行接口•PV 源选项*所有⇒自动⇒手动⇒SUB, 从程序输入⇒追踪*仅自动Point Exec State•Active•InactiveX6Honeywell DCS 系统操作控制台体系结构•GUS*Deskside GUS 用于纺丝层, ICR, 纺丝 3rd层和培训系统。
霍尼韦尔DCS操作手册(通用)
霍尼韦尔PKS系统操作手册目录第一章.控制系统介绍 (3)1.Honeywell公司PKS系统概述 (3)2.我公司PKS系统配置 (4)第二章.过程操作 (5)1.画面介绍及操作 (5)1.1.标准画面介绍及操作 (5)1.2.状态行介绍(Unde rstanding the Status Line) (6)1.3.工具栏介绍(Using the Toolbar) (8)1.4.点细目画面及操作 (10)1.5.操作组画面及其操作 (20)1.6.报警功能及其画面操作 (22)1.7.信息摘要及其画面操作 (30)1.8.事件摘要及其画面操作 (32)1.9.警报摘要及其画面操作 (33)1.10.总貌画面 (34)1.11.用户流程图介绍 (34)2.历史数据和趋势操作 (37)2.1.历史数据: (37)2.2.趋势: (38)第一章. 控制系统介绍1.Honeywell公司PKS系统概述DCS系统采用霍尼韦尔的Experion PKS过程知识系统。
Experion PKS 系统是当代最先进的控制系统之一,包含了霍尼韦尔三十年来在过程控制、资产管理、行业知识等方面积累的经验,采用最先进的开放平台和网络技术,为工业企业提供一个统一的、全厂的、自动化过程控制、设备和资产管理、直至生产管理、集成制造等一体化的知识系统体系结构和全系列的解决方案。
Experion PKS系统能满足各种自动化应用要求,为过程控制、SCADA应用和批量控制提供一个开放式控制系统,且满足业界要求的高性能、灵活性、易用性、高可靠性等。
典型Experion PKS系统的体系结构如下图1所示。
图12.我公司PKS系统配置霍尼韦尔提供的系统覆盖范围包括中央控制室、6个现场机柜室,由提供的光纤网络以星形连接方式连接中央控制室和与其关联的各个现场机柜室。
网络图如下图2:图2硬件配置方面,霍尼韦尔公司为神达、昊达公司配置的是PKS系统最新版本R410,其配置如下:l控制器:Experion PKS系统的C300控制器作为DCS主控制器,性能强大,可以与多种IO卡件兼容。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
霍尼韦尔 PKS系统过程操作与系统维护(修改版)******项目二〇一一年十月二十八日目录第一章.控制系统介绍 (3)1.Honeywell公司的DCS简介 (3)第二章.过程操作 (3)1.操作站介绍 (3)1.1.操作员键盘 (4)2.画面介绍及操作 (4)2.1.标准画面介绍及操作 (4)2.2.状态行介绍(Understanding the Status Line) (5)2.3.工具栏介绍(Using the Toolbar) (8)2.4.点细目画面及操作 (11)2.5.操作组画面及其操作 (21)2.6.报警功能及其画面操作 (23)2.7.信息摘要及其画面操作 (28)2.8.事件摘要及其画面操作 (29)2.9.警报摘要及其画面操作 (30)3 历史数据和趋势操作 (31)第三章.系统维护 (37).1系统状态画面 (37).2系统报警画面 (38).3报警字的介绍 (39).4监视控制器及I/O卡的状态显示画面 (41).5服务器的运行状态画面 (41).6监视操作站的状态 (42).7监视打印机的状态 (43).8FTE状态画面 (43).9控制图介绍 (44)第一章. 控制系统介绍1.Honeywell公司的DCS简介******项目的DCS采用的是美国Honeywell公司的PKS系统。
PKS系统是由Honeywell公司在TDC2000、TDC3000、TPS和Plantscape 系统的基础上,采用世界先进技术而推出的。
PKS是英文Process Knowledge System的第一个字母组成,称为过程知识系统。
PKS系统的核心是基于开放且功能强大的Microsoft公司的Windows 2008服务器/客户系统,它由高性能的控制器、先进的工程组态工具、开放的控制网络等组成。
利用服务器的高速动态缓存区采集实时数据,提供报警、显示、历史数据采集、报表报告等功能。
PKS一般由服务器(Server)、工作站(Station)、控制器(C300)和实时冗余容错以太网(FTE)网络组成,服务器的操作系统为美国微软公司的英文Windows 2008 Server,工作站安装微软公司的英文Windows 7 Profersional操作系统,支持中文显示。
第二章. 过程操作1.操作站介绍操作员站为系统的人机接口,采用DELL公司的商用计算机,21英寸显示器,采用落地式操作台和工业键盘,以满足用户操作的安全、可靠和方便操作。
1.1.操作员键盘键盘为DELL公司商用计算机的标准键盘,是操作员进行应用软件组态和系统维护的必要手段。
此处从略。
2.画面介绍及操作2.1.标准画面介绍及操作系统标准显示画面便于操作人员更方便地学习和使用系统,系统标准显示画面包括:流程图显示画面系统报警摘要显示画面报警摘要显示画面事件摘要显示画面系统状态显示画面诊断显示画面趋势画面操作组画面点细目画面弹出子图显示画面弹出控制面板显示画面操作站的屏幕显示分布区域见下图:菜单栏(Menubar):你可以从操作站的菜单来选择要执行的功能。
例如,调用事件摘要,选择View > Events > Event Summary工具栏(Toolbar):通过点击工具栏中经常要用的命令,来快速访问。
命令区(Command?Zone):在命令栏区域中打入命令。
信息区(Message?Zone):在信息区域操作站显示解释信息,例如,你调用一个不存在的画面,在信息区可能会出现“The display file xxxx was not found(这个画面文件不存在)”显示区域(Display):画面区域,进行监视和控制报警信息行(Alarm Line):通常报警行显示未确认的较高级别的最新报警信息状态行(Status Line):提供系统状态的报警,例如红色字段在闪,指示一个未确认的状态报警。
2.2.状态行介绍(Understanding the Status Line)状态行提供系统状态的概貌,操作站(station)的状态行为:Console 操作台的状态行为:下面对状态行的每个字段从左起进行描述:日期和时间(Date and time):系统的当前日期和时间。
Alarm:指示有无报警:空:没有报警红色闪:表示至少有一条未确认的报警。
红色不闪:表示至少有一条报警,且已被确认。
点击这个字段调出报警摘要,列出每条报警显示。
System:指示有无系统报警,例如服务器和其它设备通讯连接故障(如通道、控制器等等):空:没有系统报警青色闪:表示至少有一条未确认的系统报警。
青色不闪:表示至少有一条系统报警,且已被确认。
点击这个字段调出系统状态显示,列出每条系统报警显示。
Message:指示有无信息报警:空:没有信息报警绿色闪:表示至少有一条未确认的信息报警。
绿色不闪:表示至少有一条系统报警,且已被确认。
点击这个字段调出信息摘要,列出每条信息显示。
Alert:指示有无警报空:没有警报绿色闪:表示至少有一条未确认的警报。
绿色不闪:表示至少有一条警报,且已被确认。
点击这个字段调出警报,列出每条警报显示。
Server ID:与操作站连接的服务器的名称,服务器为冗余配置,此状态行显示:“servera”。
Station number :你操作的操作站的名字,此状态行显示:“Stn03”。
而Console 操作台显示为:CStn01_1。
Security level :你登录在工作站上的安全级别,此状态行显示:“Oper”。
通过安全级别来限制对系统的操作,保证系统的安全,安全级别介绍如下:View only:只读,允许查看画面、趋势和报警,不允许任何修改Ack only:确认,允许确认报警,查看画面、趋势和报警,不允许任何修改Oper : 表示操作员级,允许确认报警,并对分配给你的操作站的位号进行操作Supv : 表示值班长级,具备操作员的权限,并对趋势和操作组进行组态Engr : 表示工程师级,可以对分配的部分位号和系统组态,Mngr : 表示管理员级,对整个系统可以组态和操作,具备最高权限缺省的级别为Oper,级别越高,操作权限越大。
当你操作时出现:“Higher security level required”时,说明你的权限不够,不能进行此项操作。
Honeywell公司的PKS系统提供两种安全性:基于操作站的安全性和基于操作员的安全性。
我厂采用基于操作站的安全性,当操作站启动时就自动以OPER (操作员)安全级别登录。
2.3.工具栏介绍(Using the Toolbar)工具栏中的按钮对经常使用的功能提供快速的进入,例如,调一个系统菜单你可以直接通过按钮进入。
下面对这些按钮进行介绍:按钮描述系统菜单键(System Menu):快速调出系统菜单画面。
调出报警摘要(Alarm Summary):每个报警提供一行描述。
对应点的点细目画面。
2.如果在当前画面没有任何目标被选择,点击该按钮调出搜寻画面。
将当前画面缩放(Zoom),一般设置在100%。
命令在文本字段打入。
命令输入框也保留你先前所打入的命令文本。
从列Command表中选择后回车执行命令在命令输入框(Command)输入命令,你能快速进行相关的操作。
例如,调一个“U1304”流程图:点击命令输入框打入“U1304”并按回车。
调一个点的细目画面:点击命令输入框打入“LIC2550”,再点击就可调出LIC2550的细目画面2.4.点细目画面及操作在点细目画面和操作组画面上,都有仪表面板,先介绍仪表面板。
操作时,在流程图上调出操作面板进行控制,在Honeywell公司的PKS 系统中,参数的表示见下图:测量:用字母PV表示给定:用字母SP表示输出:用字母OP表示。
控制方式:用字母MD表示,控制方式为手动用MAN表示,自动用AUTO 表示,串级用CAS表示控制方式的属性:用字母MD Attr表示在仪表面板上,如果有报警在测量棒图旁由标尺的不同颜色显示。
我厂在标准面板上对SP和OP各增加4个按钮(两个慢速、两个快速),在面板上有报警显示,也能确认,见图2:图2 操作面板点细目画面是一个既可以监视或操作,又反映该点全貌的多页画面。
对于一个指示点只有三页;而对于一个控制点,点细目画面有七页,下面将介绍。
点细目画面显示某一回路的全部参数信息和实时趋势,从而可方便的对回路的参数如报警值、死区、P、I、D值等进行整定。
点细目画面的主要功能:(1)监视和控制一个点的主要操作参数(控制回路或检测回路),如SP(给定值),PV(过程变量),OP(输出值)和控制方式。
(2)显示一个点的PV,SP和OP的棒图指示。
若是数字量点,则显示数字量点的状态指示。
(3)显示该点的类型及地址。
(4)显示该点是否组态了报警,以及报警值。
(5)显示该点是否在线工作。
(6)显示该点的单位及描述、工程单位、量程。
(7)显示该点的控制方案及参数整定值。
(8)显示该点的控制输入输出连接(如果是一个控制点的话)。
图3是一个监视回路的细目画面,显示了报警组态情况和报警字:报警优先级图3 点细目画面设备点细目画面见图4,显示开关当前状态,操作员可以对该点进行手动操作,选OP的下拉菜单到OPEN或CLOSE,也可以点击OPEN或CLOSE 右边的小圆圈:图4图5为PID回路的点细目画面,由于点细目画面的面板上有参数显示,操作用得也较多,在这里结合PID回路的七幅画面进行展开介绍。
工艺人员了解这些画面可以帮助自己达到更好的操作和控制。
在前面的仪表面板上已经介绍了各个目标的含义,点细目画面左边也为仪表面板,图中的棒图为测量(PV)和输出(OP),棒图的左边的箭头为给定,下方的数值为给定(SP)、测量(PV)和输出(OP),在这里可以根据自动或手动来输入数值改变给定或输出。
最下方为控制方式(MD)和控制方式属性(MD ATTR),操作人员能够改变MAN(手动)、AUTO(自动)或CAS(串级);控制方式属性也可以改变,注意控制方式属性有操作员控制和程序控制,在过程由程序控制时,必须在程序控制方式的属性,这在组态时定义。
但要注意:对于程序控制阀门不是紧急情况不要将控制方式属性切回到操作员方式,否则程序控制执行将出现不正常。
在细目画面中能知道该点的控制状态,执行周期、相位和报警状态。
图5第二幅画面为PID调整参数画面,能够根据趋势来进行调整PID参数,见图6:(图6)这里的PID为增益、积分时间(分钟)和微分时间(分钟),控制算法为EQA;控制作用为反作用(REVERSE);Integral Time(T1)为积分时间,单位:分钟;Derivitive Time(T2)为微分时间,单位:分钟;Overall Gain为增益。