1_GPS伪距定位原理
伪距测距原理
伪距测距原理GPS接收机若要实现定位,必须解决如下两个问题:一是要知道各颗可见卫星在空间的准确位置,二是要测量从接收机到这些卫星的精确距离。
GPS接收机对每颗卫星产生伪距和载波相位两个基本距离测量值。
伪距测量值:伪距在GPS领域是一个非常重要的概念,它是GPS接收机对卫星信号的一个最基本的距离测量值。
通过测量GPS信号从GPS卫星到接收机的传输时间,再乘以信号的传播速度,可得到GPS卫星与接收机之间大概距离的测量值称为伪距。
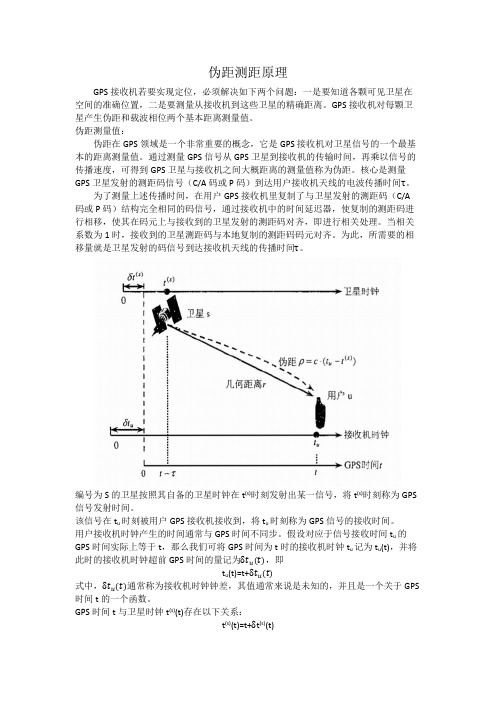
核心是测量GPS卫星发射的测距码信号(C/A码或P码)到达用户接收机天线的电波传播时间τ。
为了测量上述传播时间,在用户GPS接收机里复制了与卫星发射的测距码(C/A码或P码)结构完全相同的码信号,通过接收机中的时间延迟器,使复制的测距码进行相移,使其在码元上与接收到的卫星发射的测距码对齐,即进行相关处理。
当相关系数为1时,接收到的卫星测距码与本地复制的测距码码元对齐。
为此,所需要的相移量就是卫星发射的码信号到达接收机天线的传播时间τ。
编号为S的卫星按照其自备的卫星时钟在t(s)时刻发射出某一信号,将t(s)时刻称为GPS 信号发射时间。
该信号在t u时刻被用户GPS接收机接收到,将t u时刻称为GPS信号的接收时间。
用户接收机时钟产生的时间通常与GPS时间不同步。
假设对应于信号接收时间t u的GPS 时间实际上等于t,那么我们可将GPS时间为t时的接收机时钟t u记为t u(t),并将此时的接收机时钟超前GPS时间的量记为δt u(t),即t u(t)=t+δt u(t)式中,δt u(t)通常称为接收机时钟钟差,其值通常来说是未知的,并且是一个关于GPS 时间t的一个函数。
GPS时间t与卫星时钟t(s)(t)存在以下关系:t(s)(t)=t+δt(s)(t)其中卫星时钟钟差δt(s)(t)可以视为已知的,根据此式GPS时间与卫星时钟在信号发射时刻(t-τ)时的关系可表达成t(s)(t-τ)=t-τ+δt(s)(t-τ)GPS接收机根据接收机时钟在t u(t)时刻对GPS信号进行采样,然后对采样信号进行处理,可得到标记在GPS信号上的发射时间t(s)(t-τ)。
伪距定位原理.ppt

1、GPS伪距定位解的精度评定。
小结
Summary
本节课到此结束
3. 伪距定位观测方程的解
The Solution of Observation Equations
3.3 几个有关的问题
(4) 伪距定位的几何解释
三球定位原理
小结
Summary
伪距定位原理是《GPS原理与应用》的核心内容,主要介绍 了伪距定位观测方程的建立和伪距定位观测方程的解,得到了必 须同时观测4颗卫星才能进行定位的结论。
l j X m jY n j Z ctr 0j %j ct j I j T j
小结 Summary
伪距定位原理是《GPS原理与应用》的核心内容,主要介绍 了伪距定位观测方程的建立和伪距定位观测方程的解,得到了必 须同时观测4颗卫星才能进行定位的结论。
作业题
1.利用GPS进行伪距定位,为什么必须至少同时观测4颗卫星? 2.如何利用GP j T j
toc、a0、a1、a2
2. 伪距定位观测方程
The Observation Equations
2.3 信号传播时延
真实的信号传播时延:
j Tr T j
实测的信号传播时延:
%j tr t j
tj T j tj tr Tr tr
%j (Tr tr ) (T j t j )
2. 伪距定位观测方程
The Observation Equations
2.4 伪距
%j (Tr T j ) tr t j
j tr t j
c%j c j c tr c t j
%j j c tr c t j
伪距(Pseudo Range)是现代卫星导航系统的主要观测量之一。
GPS伪距测量定位概述GPS的观测量GPS
则ti历元测码伪距方程的误差方程式之最 终形式可表示为:
vk l kXˆ mkYˆ nkZˆ ˆ Lk
式(5)
4、列出所有测码伪距方程的误差方程 式(5)表示的测码伪距误差方程是ti一 个观测历元,P1号测站对Sk卫星观测的 误差方程,当ti历元锁定的卫星数为k=1, 2,3…n颗时,误差方程式阵可表示为:
2 2
(x2
X )2
(y2
Y)2
(z2
Z)2
2 3
(x3
X )2
(y3
Y)2
(z3
Z)2
式中
j k
---星地几何距离
几何距离的一般表示方式
1
[( x1
X
)2
( y1
Y
)2
( z1
Z )2 ]2
(7)
注意:星地几何距离是一个永远未知 的量。
2、星地几何距离与伪距关系
第五章 GPS伪距测量定位 第一节概述 一、GPS的观测量 •GPS测量中的基本观测量---星地伪距 •GPS测距的基本方法---
测距码测距和载波相位测距 •伪距:因实测距中含有误差,并不是卫星 与接收机间的几何距,故称伪距
1 GPS的基本观测量
GPS定位中有如下几种观测量:
•码相位伪距(测码伪距):C/A码伪距、P码 伪距(星地距);
3、列出测码伪距方程的误差方程
在式(3)中,令观测值 (1k )的改正数为v k
将接收机钟差项用其等效距离代替,即令
第五章 GPS卫星定位基本原理-1

伪距差分原理

伪距差分原理
伪距差分原理是一种通过测量卫星信号的伪距差来确定接收机位置的方法。
在使用全球定位系统(GPS)等卫星导航系统进行定位时,接收机需要同时接收多颗卫星的信号。
每颗卫星都会发送一个精确的时间信号,接收机通过测量自身接收到的卫星信号与卫星发送的信号之间的时间差(即伪距差)来计算自身与卫星的距离。
伪距差分原理的基本原理是:先将一个已知位置的基准站接收到的卫星信号质量较好的伪距数据与接收到的同一颗卫星信号的伪距数据进行比较,得到差分改正值。
然后将这个差分改正值应用到未知位置的移动接收机的伪距数据上,得到修正后的伪距数据。
通过修正后的伪距数据,再利用三角定位等方法,就可以精确计算出移动接收机的位置。
伪距差分原理的优点是能够有效消除大气延迟、钟差等误差,提高定位的精度。
但它的缺点是需要一个基准站的支持,并且基准站与移动接收机之间的距离不能太远,以保证差分改正值的准确性。
伪距定位原理.ppt

2. 伪距定位观测方程
The Observation Equations
2.1 真实的信号传播时延
Tj
j Tr T j
问 题
Tr
真实的信号传播时延能够直接获取吗?
2. 伪距定位观测方程
The Observation Equations
2.2 钟差
钟差(Clock Bias):卫星、接收机钟面时与卫星导航系统时之差
1. 相关知识回顾
Review
1.1 空间距离后方交会原理
GPS的定位体制:“多星、高轨、测距”
利用空间距离后方交会确定接收机的位置
(X 2,Y 2,Z2)
(X 3,Y3,Z3)
(X1,Y1, Z1)
(X 4,Y 4,Z4)
(X ,Y , Z )
1. 相关知识回顾
Review
1.2 卫星位置计算
tr tr Tr
t j t j T j
toc、a0、a1、a2
2. 伪距定位观测方程
The Observation Equations
2.3 信号传播时延
真实的信号传播时延:
j Tr T j
实测的信号传播时延:
%j tr t j
tj T j tj tr Tr tr
%j (Tr tr ) (T j t j )
l j X m jY n j Z ctr 0j %j ct j I j T j
小结 Summary
伪距定位原理是《GPS原理与应用》的核心内容,主要介绍 了伪距定位观测方程的建立和伪距定位观测方程的解,得到了必 须同时观测4颗卫星才能进行定位的结论。
作业题
1.利用GPS进行伪距定位,为什么必须至少同时观测4颗卫星? 2.如何利用GPS伪距定位观测方程解算用户位置?
GPS导航定位原理以及定位解算算法

GPS导航定位原理以及定位解算算法全球定位系统(GPS)是英文Global Positioning System的字头缩写词的简称。
它的含义是利用导航卫星进行测时和测距,以构成全球定位系统。
它是由美国国防部主导开发的一套具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航定位系统。
GPS用户部分的核心是GPS接收机。
其主要由基带信号处理和导航解算两部分组成。
其中基带信号处理部分主要包括对GPS卫星信号的二维搜索、捕获、跟踪、伪距计算、导航数据解码等工作。
导航解算部分主要包括根据导航数据中的星历参数实时进行各可视卫星位置计算;根据导航数据中各误差参数进行星钟误差、相对论效应误差、地球自转影响、信号传输误差(主要包括电离层实时传输误差及对流层实时传输误差)等各种实时误差的计算,并将其从伪距中消除;根据上述结果进行接收机PVT(位置、速度、时间)的解算;对各精度因子(DOP)进行实时计算和监测以确定定位解的精度。
本文中重点讨论GPS接收机的导航解算部分,基带信号处理部分可参看有关资料。
本文讨论的假设前提是GPS接收机已经对GPS卫星信号进行了有效捕获和跟踪,对伪距进行了计算,并对导航数据进行了解码工作。
1地球坐标系简述要描述一个物体的位置必须要有相关联的坐标系,地球表面的GPS接收机的位置是相对于地球而言的。
因此,要描述GPS接收机的位置,需要采用固联于地球上随同地球转动的坐标系、即地球坐标系作为参照系。
地球坐标系有两种几何表达形式,即地球直角坐标系和地球大地坐标系。
地球直角坐标系的定义是:原点O与地球质心重合,Z轴指向地球北极,X轴指向地球赤道面与格林威治子午圈的交点(即0经度方向),Y轴在赤道平面里与XOZ构成右手坐标系(即指向东经90度方向)。
地球大地坐标系的定义是:地球椭球的中心与地球质心重合,椭球的短轴与地球自转轴重合。
地球表面任意一点的大地纬度为过该点之椭球法线与椭球赤道面的夹角φ,经度为该点所在之椭球子午面与格林威治大地子午面之间的夹角λ,该点的高度h为该点沿椭球法线至椭球面的距离。
第五章GPS伪距测量定位

GPS 263529.088 -2207980.555 4449130.077 4000293.189 0.086 3.38
摄站 263529.326 -2208009.199 4449106.838 4000366.851 0.088 3.38
GPS 263530.112 -2208103.797 4449030.090 4000366.851 0.094 3.38
第五章GPS伪距测量定位
位置DGPS测量
位置DGPS测量是一种简单的差分定位模式
X R YR
XR YR
X YR
R 0
0
Z R Z R Z R 0
X R , YR , Z R ——基准接收机所测得的基准站三维坐标 X R 0 , YR 0 , Z R 0 ——基准站在WGS-84大地坐标系内已知三维坐标
称为GPS时系)。
第五章GPS伪距测量定位
3种时间系统的相互关系
第五章GPS伪距测量定位
❖ 伪噪声码(C/A码或P码)从GPS卫星到GPS信号 接收天线的传播时间:
T(R)t(S) (5.1.1)
T ( R) ——伪噪声码从GPS卫星到GPS信号接收天线的时元
t ( S ) ——伪噪声码在其GPS卫星的发射时元
第五章GPS伪距测量定位
若用e表示用户到第j颗卫星的单置矢量(方向余
弦),并考e • 虑到j(t)j(t)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三、GPS伪距定位原理 GPS伪距定位原理
GPS定位的基本原理 GPS定位的基本原理
后方交会
– 原理:通过测定到若干已知点的距离定位。 原理:通过测定到若干已知点的距离定位。 – 要求:要测定到4个已知点的距离。 要求:要测定到4个已知点的距离。
已知点
– GPS卫星(利用星历计算其位置) GPS卫星 利用星历计算其位置) 卫星(
伪距
接收机获取的信号传播时间 真实信号传播时间
δ ti j 接收机钟同卫星钟的偏差
ρi j
卫星到用户的几何距离
大气影响
如果忽略卫星之间钟差影响, 如果忽略卫星之间钟差影响,并考虑 电离层、对流层折射影响,可得: 电离层、对流层折射影响,可得:
%i j = ρi j − cδ ti (t ) − ∆ ij I (t ) − ∆ ijT (t ) ρ
思考题
GPS定位为什么需要4 GPS定位为什么需要4颗以上卫星 定位为什么需要 GPS为什么采用测距码 GPS为什么采用测距码
( X s − X ) + (Ys − Y ) + ( Z s − Z ) % j + ∆ ij I (t ) + ∆ ijT (t ) =ρ
2 2
2 1/ห้องสมุดไป่ตู้2
− cδ ti
式中j为卫星数, 式中j为卫星数,j=1,2,3…。 3…。
码观测值测量原理
GPS卫星发出测距码经 GPS卫星发出测距码经 ∆t 时间后到达接收机 ; 接收机产生复制码(复制码=测距码) 接收机产生复制码(复制码=测距码)通过时 延器使其延迟时间 τ ; 将复制码和测距码进行码相关处理, 将复制码和测距码进行码相关处理,若自相关 系数 R (t ) = 1,则 ∆t = τ , = cτ ; ρ
用户部分
地面控制部分 地面控制部分
二、GPS卫星信号 GPS卫星信号
GPS卫星信号的成分 GPS卫星信号的成分
载波 测距码
– 用于测定从卫星至接收机间距离的二进制码 – C/A码,P(Y)码 C/A码 P(Y)码
粗码/ Code) 粗码 捕获码( ) 精码(Precise Code) 精码(/捕获码(Coarse/Acquisition Code) Code 导航电文 码元宽度: 码元宽度 码元宽度: : 293.05m 码元宽度: 29.30m GPS卫星向用户播发的一组反映卫星空间位 由GPS : L1和 调制载波: L1和L2 调制载波卫星向用户播发的一组反映卫星空间位 调制载波: 调制载波: L1
置、工作状态、卫星钟修正参数和电离层改正 工作状态、 参数等重要数据的二进制码
载波的作用和类型
作用
– 搭载其它调制信号 – 测距 – 测定多普勒频移
L2
24.42c m 19.03c m
L1
类型
– 目前
L1 : 154×f0 = 1575.43MHz;19.03cm 154× 1575.43MHz; 120× 1227.60MHz; L2 : 120×f0 = 1227.60MHz;24.42cm – 现代化后 115× 1176.45MHz; L5 :115×f0 = 1176.45MHz;25.48cm
GPS导航定位精度 GPS导航定位精度
GPS现代化后 GPS现代化后
小结
GPS信号有三个内容 GPS信号有三个内容 GPS定位原理是距离交会方法 GPS定位原理是距离交会方法 GPS观测方程代求参数有 观测方程代求参数有4 GPS观测方程代求参数有4个 GPS现代化后伪距定位精度可以提高一倍 GPS现代化后伪距定位精度可以提高一倍
测距的基本方法
– 码伪距:距离 = 码伪距:
波速× 波速×传播时间
GPS定位原理: GPS定位原理:测距交会 定位原理
2个球面相交——圆环 个球面相交——圆环 —— 3个球面相交——两交点 个球面相交——两交点 —— 4个球面相交——唯一交点 个球面相交——唯一交点 ——
B C A
GPS定位示意图 GPS定位示意图
伪距定位观测方程
与卫星坐标( Zs) 几何距离 ρ 与卫星坐标(Xs, Ys, Zs)和接 收机坐标(X,Y,Z)之间有如下关系: 收机坐标(X,Y,Z)之间有如下关系:
ρ = ( X s − X ) + (Ys − Y ) + ( Z s − Z )
2 2 2 2
% ρi = ρi − cδ ti (t ) − ∆ I (t ) − ∆ T (t )
j j j i j i
卫星坐标------导航电文 卫星坐标------导航电文 -----电离层改正— 电离层改正—模型 对流层改正— 对流层改正—模型 待求参数---待求参数---- X , Y , Z , δ ti
伪距定位观测方程
测码伪距观测方程的常用形式如下: 测码伪距观测方程的常用形式如下:
由美国建立的一个 卫星导航定位系统, 卫星导航定位系统, 利用该系统, 利用该系统,用户 可以在全球范围内 实现全天候、连续、 实现全天候、连续、 实时的三维导航定 位和测速. 位和测速.
GPS工作流程 GPS工作流程
空间部分 6个轨道 24颗卫星 24颗卫星 20200km 监控站 1个主控站 3个注入站 5个监测站
B C
A
四、GPS伪距观测方程 GPS伪距观测方程
伪距观测方程
伪距定位观测方程
% ρi j = ∆ti j c ∆τ i = ∆ti + δ ti
j j j
}
% ρi j = c∆τ i j − cδ tij
c∆τ i = ρ i
j j
% ρi j ∆ti j ∆τ i j
}
% ρi j = ρi j − cδ ti j
GPS伪距定位原理 GPS伪距定位原理
王建强 东华理工大学测绘工程学院 2012年 11日星期日 2012年3月11日星期日
目录
一、课堂回顾 GPS卫星信号 二、GPS卫星信号 GPS伪距定位原理 三、GPS伪距定位原理 GPS伪距观测方程 四、GPS伪距观测方程
GPS是什么? GPS是什么? 是什么
测距码的作用和性质
作用
– 测距
性质
– 伪随机噪声码 – 强相关性
什么叫伪距
所测伪距就是由卫星发射的测距码信号到达 GPS接收机的传播时间乘以光速所得出的量测 GPS接收机的传播时间乘以光速所得出的量测 距离。 距离。 C/A码进行测量的伪距为C/A码伪距 码进行测量的伪距为C/A码伪距, 用C/A码进行测量的伪距为C/A码伪距,用P 码测量的伪距为P码伪距。 码测量的伪距为P码伪距。