三种数控系统程序代码
数控车床华中系统用户宏程序编程
③系统变量:系统变量为#1000~#1199,它能获取包含在机床处理器或NC内存 中的只读或读/写信息,包括与机床处理器有关的交换参数、机床状态获取参 数、加工参数等系统信息
格式(ii) : IF 条件表达式 … ENDIF
.
7
5、 循环语句WHILE,ENDW
❖ 格式:WHILE 条件表达式 ❖… ❖ ENDW
.
8
6、 宏程序/子程序调用的参数传递规则
❖ G 代码在调用宏(子程序或固定循环, 下同)时,系统会将当前程序段各字 段(A~Z共26个字段,如果没有定义 则为零)的内容拷贝到宏执行时的局 部变量#0 ~ #25,同时拷贝调用宏时 当前通道九个轴(轴0~轴8)的绝对 位置(机床绝对坐标)到宏执行时的局 部变量#30 ~ #38。 ❖ 宏程序的调用格式为: ❖ M98 P(宏程序名)<变量赋值> ❖ 或G65 P(宏程序名)<变量赋值>。
.
12
用户宏程序训练
.
13
数控车削加工中公式曲线宏程序编程模板的 应用
一、公式曲线宏程序编程模板的原理和使用步骤 1、如何选定自变量 1)公式曲线中的X和Z坐标任意一个都可以被定义为自变量
2)一般选择变化范围大的一个作为自变量,如图1 ★ 3)根据表达式方便情况来确定X或Z作为自变量,如图3★
4)为了表达方便,在这里将和X坐标相关的变量设为#1、 #11、#12等,将和Z坐标相关的变量设为#2、#21、#22等。 际中变量的定义完全可根据个人习惯进行定义
❖ 分别用宏变量#1、#2代替上式中的X、Z,即得因变量#1相 对于自变量#2的宏表达式:
数控机床程序段格式
数控机床程序段格式在编制数控机床程序时,首先要根据机床的脉冲当量确定坐标值,然后根据其程序段格式编制数控程序。
所谓程序段,就是指为了完成某一动作要求所需的功能“字”的组合。
“字”是表示某一功能的一组代码符号,如X2500为一个字,表示X向尺寸为2500;F20为一个字,表示进给速度为20。
程序段格式是指一个程序段中各字的排列顺序及其表达形式。
常用的程序段格式有三种,即固定顺序程序段格式、带有分隔符的固定顺序程序段格式和字地址程序段格式。
由于程序段是由功能“字”组成的,因此,以下先介绍常用功能字,然后再介绍程序段格式。
1)常用功能字一个程序段中,除了由地址符N为首的三位数组成的序号字(N×××)外,常用的功能字有:准备功能字G;坐标功能字X,Y,Z;辅助功能字M;进给功能字F;主轴转速功能字S和刀具功能字T等。
(1)准备功能字。
准备功能字以地址符G为首,后跟二位数字(G00-G99)。
ISO1056 标准对准备功能G的规定见表ISO 标准对准备功能G 的规定。
我国的标准为JB3208—83,其规定ISO1056—1975(E)等效。
这些准备功能包括:坐标移动或定位方法的指定;插补方式的指定;平面的选择;螺纹、攻丝、固定循环等加工的指定;对主轴或进给速度的说明;刀具补偿或刀具偏置的指定等。
当设计一个机床数控系统时,要在标准规定的G功能中选择一部分与本系统相适应的准备功能,作为硬件设计及程序编制的依据。
标准中那些“不指定”的准备功能,必要时可用来规定为本系统特殊的准备功能。
表ISO 标准对准备功能G 的规定(2)坐标功能字。
坐标功能字(又称为尺寸字)用来设定机床各坐标之位移量。
它一般使用X,Y,Z ,U ,V ,W ,P ,Q ,R ,A ,B ,C ,D ,E 等地址符为首,在地址符后紧跟着“+”(正)或“—”(负)及一串数字,该数字一般以系统脉冲当量为单位,不使用小数点。
数控编程(08)数控铣床编程
M93:关于中心的镜像(对称于原点);
M90:取消镜像功能。
该系统子程序调用的格式为: G25 L×× ××
其中:前两位数字为子程序代码;后两位数字 为调用次数。子程序格式与FANUC 7M系统相同。 返回
镜像加工应用
(以 FANUC 11-MEA-4 为例) Y
例:零件如右图所示。现 精铣四个形状相同、高为5mm 的凸台。 建立图示坐标系(Z坐标原 点在工件上表面)。加工时, 刀具起点为(0,0,300)处;下 刀速度为50mm/min;切削速度 为200mm/min;主轴转速为 200r/min。 第一象限凸台拟定加工路 线(刀具左偏)为:
O
X
继续
镜像加工应用
加 工 子 程 序 为 :
L1000
(以 DIN 66025 为例)
Y
G01 G41 D10 X10. Y10. F100 Y20.
O
X
X15.
G03 X20. Y25. I0 J5. G01 Y30.
X30.
G02 X45. Y15. I0 J-15. G01 Y10.
X5.
五、镜像指令
在加工某些对称图形时,为了避免编制 类似的程序段,缩短加工程序,可采用镜像 加工功能。镜像指令在不同的系统中,其代 码各不相同。下面介绍两种系统的镜像指令 代码。 ㈠ FANUC 11-MEA-4 系统 ㈡ DIN 66052 系统
镜像加工应用
返回
㈠ FANUC 11-MEA-4 系统
M98 P10
G00 X70. M98 P10
X
M05
G90 G00 X0 Y0 Z200. M02
继续
子程序应用
使用子程序时应注意: 1、主程序可以调用子程序,子程序也可以调 用其它子程序,但子程序不能调用主程序和自身。 2、主程序中模态代码可被子程序中同一组的 其它代码所更改,也就是说,由子程序返回主程 序时,同组中的模态代码已经改为子程序中的状 态。 3、最好不要在刀具补偿状态下的主程序中调 用子程序,因为当子程序中连续出现两段以上非 刀补平面的轴向运动指令时,很容易出现过切等 错误。 返回
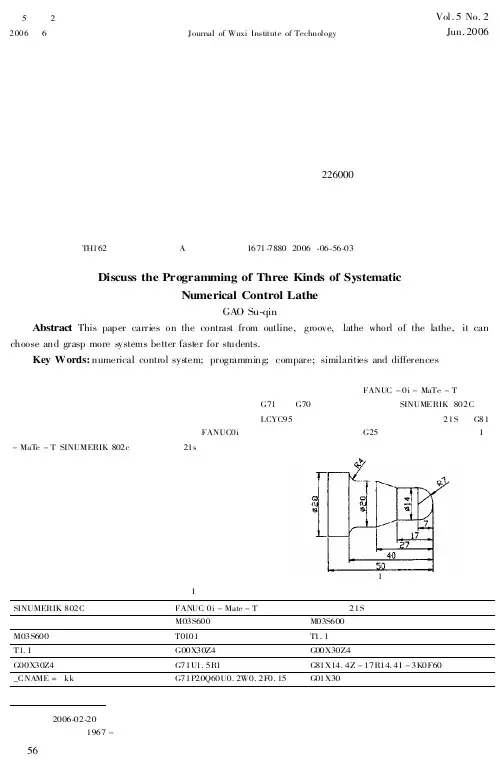
浅谈三种数控系统的车削加工编程
无 锡 职 业 技 术 学 院 学 报
a>3<6:B >@ _3b5 Q68?5?3?; >@ *;=76>B>DH
‘>B J . M>J ! a36J !""#
浅 谈 三 种 数 控 系 统 的 车 削 加工 编 程
高素琴
(江苏海安县技工学校 ) 江苏) 海安 ) !!#""" )
收稿日期: !""#$"!$!" 作者简介: 高 素琴 (%&#’ ( ) ) , 女, 江苏海安人, 海安县技工学校讲师。
.#
高素琴: 浅谈三种数控系统的车削加工编程
第+ 期
!" #$ % & !"# ’ % # ( ) !"# * % " ( $ !"#& % # !"" # % " !" "" % #( + !"" + % # ( #* 5676&$ ( 综合加工循环) 子程序 44( 89: -##.# /# -#3.")/ 0 16! % 1 -#"/ 0 "1 .+#/ 0 +1 / 0 3’ -#+.+*/ 0 )#6! % ) -#"/ 0 $) .+# ;"1
一、 轴类零件轮廓车削
车轮廓: 工艺基本相同, 由粗到精, 由近到远, 所不同
的是各系统轮廓循环指令不同有区别。下面从两种题型 上来具体分析: 图% 表 %) 三种系统最简洁的轮廓程序 2QMNPRSQT -"!O 系统: 主程序 P"/2#"" *%J % 0""W/"XY ZOM,PR [ ” \\” ( 轮廓子程序) L,MNO "5 ( P:?; ( * 系统: P"/2#"" *"%"% 0""W/"XY 0’%N%J .S% ( 粗车循环) 0’%]!"^#"N"J !_"J !L"J %. 国产华兴 !%2: P"/2#"" *%J % 0""W/"XY ( 以下是粗车程序) 0-%W%YJ YX ( %’S%YJ YQ ( /T"L#" 0"%W/"
完整版)数控车床指令代码大全
完整版)数控车床指令代码大全数控车床指令代码大全1.F功能F功能指令用于控制切削进给量,有两种使用方法。
第一种是每转进给量,编程格式为G95F~,其中F后面的数字表示主轴每转进给量,单位为mm/r。
例如,G95F0.2表示进给量为0.2mm/r。
第二种是每分钟进给量,编程格式为G94F~,其中F后面的数字表示每分钟进给量,单位为mm/min。
例如,G94F100表示进给量为100mm/min。
2.S功能S功能指令用于控制主轴转速,编程格式为S~,其中S后面的数字表示主轴转速,单位为r/min。
在具有恒线速功能的机床上,S功能指令还有其他作用。
第一种是最高转速限制,编程格式为G50S~,其中S后面的数字表示最高转速,单位为r/min。
例如,G50S3000表示最高转速限制为3000r/min。
第二种是恒线速控制,编程格式为G96S~,其中S后面的数字表示恒定的线速度,单位为m/min。
例如,G96S150表示切削点线速度控制在150m/min。
第三种是恒线速取消,编程格式为G97S~,其中S后面的数字表示恒线速度控制取消后的主轴转速。
如果S未指定,将保留G96的最终值。
例如,G97S3000表示恒线速控制取消后主轴转速为3000r/min。
3.T功能T功能指令用于选择加工所用刀具,编程格式为T~,其中通常有两位数表示所选择的刀具号码。
但也有T后面用四位数字,前两位是刀具号,后两位是刀具长度补偿号和刀尖圆弧半径补偿号。
例如,T0303表示选用3号刀及3号刀具长度补偿值和刀尖圆弧半径补偿值。
T0300表示取消刀具补偿。
4.M功能M功能指令用于控制机床的各种辅助功能。
M00表示程序暂停,可用NC启动命令(CYCLESTART)使程序继续运行;M01表示计划暂停,与M00作用相似,但M01可以用机床“任选停止按钮”选择是否有效;M03表示主轴顺时针旋转;M04表示主轴逆时针旋转;M05表示主轴旋转停止;M08表示冷却液开;M09表示冷却液关;M30表示程序停止,程序复位到起始位置。
第四章 数控铣床(加工中心)编程指令
G00一般用于加工前快速定位或加工后快速退刀, 快移速度可由面板上的快速修调旋钮修正。 G00为模态功能,可由G01、G02、G03 或G33 等指 令注销。 1)HCNC-22M系统指令格式:G00 X_Y_Z_; X_Y_Z_: 快速定位终点,在G90(绝对值指令)时 为终点在工件坐标系中的坐标;在G91(增量值指 令)时为终点相对于起点的位移量。 2)FANUC-0i-MA系统指令格式: G00 IP_ ; IP_:绝对值指令时,是终点的坐标值;增量值指 令时,是刀具移动的距离。 3)SIEMENS 802D系统指令格式:G0 X_Y_Z_; X_Y_Z_:绝对值指令时,是终点的坐标值;增量值 指令时,是刀具移动的距离。
二、准备功能(G代码) 准备功能G指令由G及其后面的一或二位数字组 成,它用来规定刀具和工件的相对运动轨迹、机床 坐标系、坐标平面、刀具补偿、坐标偏臵等多种加 工操作。 G功能有非模态G功能和模态G功能之分: (1)非模态G功能:只在所规定的程序段中有效 ,程序段结束时被注销。 (2)模态G功能:为一组可相互注销的G功能, 这些功能一旦被执行则一直有效,直到被同一组的G 功能注销为止。参数的不同组G代码可以放在同一程序
1、进给控制功能指令G00、G01、G02/G03的格 式及应用 G00、G01、G02/G03属于基本移动指令,分别 是快速移动指令、直线插补指令和圆弧插补指令, 在所有数控系统中,功能和应用上基本都是一致的 ,区别在于指令的格式上,下面针对HCNC-22M、和 SIEMENS 802D三种系统的指令格式和应用分别加以 说明。 (1)快速移动指令(G00) G00指令:刀具相对于工件以各轴预先设定的 速度,从当前位臵快速移动到程序段指令的定位目 标点。 G00指令中的快速移动速度,由机床参数“快 移进给速度”对各轴分别设定,不能用F 规定。
数控车编程
3)G33 是螺纹加工指令,可控制刀架按预定的 方式加工螺纹。
4)G36 是子程序调用指令,G36将程序运行从 主程序转至子程序。
5)G37 是子程序的开始语句。
6)G38 是子程序的结束语句.它与G37成对使用。
7)G80 表示一个循环的结束。
• G00 X(d + 2T)速移至循环起点 增量方式进入循环
• G00 X-(2T + 2s)
径向进刀
• G01 Z-(L1+ 2) F__
轴向车柱面
• G01 X(2T) Z-L2 F__ 轴向车锥面
• G00 Z (L1 + L2+ 2)
轴向快退
二、数控车编程常用指令
• 不同的数控车床,其编程功能指令基本是相同的,但也有 个别的功能指令定义有所不同,这里以CK0630数控车床 为例介绍数控车床的基本编程指令,其控制系统为 FANUC OTE-A系统。
• 常用的具有独特功能的准备功能指令有以下几个:
1)G28 使刀架沿X轴方向(即径向)快速返回 程序起始点(或对刀点)的径向位置。
X = Xp Z = Zp + 工件外伸长度 + 卡盘厚度(CK0630车床的卡 盘厚度为20mm)
注意 :
1)在机床坐标系中,坐标值是刀架中心相对于机床原点的 距离;
2) 在工件坐标系中,坐标值是刀尖相对于工件原点的距离。
二)输入方式
• 与其他数控机床加工程序不同的是,在数控车 的加工程序中,同一程序段中刀位的输入方式 可以是绝对输入方式也可以是增量输入方式。 一般,用X— Z— 表示绝对输入方式,用U— W— 表示增量输入方式,在一条加工指令中, X(U)— Z(W)— 可以混合使用。其中, X— 或U— 都是径向上的直径值或直径增量。
数控铣床常用指令
G65 宏指令 G66 调用模态宏指令 G67 取消模态宏指令 G68 坐标系统旋转 G69 坐标系统旋转取消 G73 深孔钻循环 G74 攻丝循环 G76 精镗循环 G80 固定循环取消 G81 钻孔循环 镗孔
G82 钻孔循环 镗阶梯孔 G83~ G89 循环指令 G90 绝对坐标编程 G91 相对坐标编程 G92 坐标系设定 G94 每分钟进给 G95 每转进给 G96 恒线速切削 G97 每分钟转速(主轴) G98 固定循环返回起始点位置 G99 固定循环返回R点位置
G03
N02 G17 G03 X30 Y0 I-30 F50 ;
A
N03 G00 X0 Y0 M02 ;
o
X
按相对坐标编程为: N01 G91 G00 X30 Y0 ; N02 G17 G03 X0 Y0 I-30 F50 ; N03 G00 X-30 Y0 M02 ;
Y G03
A
o
X
*当数控铣床具有三轴联动的功能,圆弧插补可 以产生螺旋插补功能。即在选择的平面内,一 边做圆弧插补,一边做第三轴的直线插补。
G15 极坐标取消 G16 极坐标设定 G17 X-Y平面选择 G18 Z-X平面选择 G19 Y-Z平面选择 G20 英制输入 G21 公制输入 G22 存储行程极限有效(ON) G23 存储行程极限无效(OFF)
G27 返回参考点校验 G28 自动返回参考点 G29 由参考点返回 G30 返回第二参考点 G33 螺纹切削 G40 刀具半径补偿取消 G41 刀具半径补偿(左) G42 刀具半径补偿(右) G43 刀具长度补偿(+) G44 刀具长度补偿(—)
置偏置。偏置量可以通过D或H代码进行设定。 G45表示沿刀具运动方向上增加一个偏置值; G46表示沿刀具运动方向上减少一个偏置值; G47表示沿刀具运动方向上增加两倍偏置值; G48表示沿刀具运动方向上减少两倍偏置值。
数控编程基本知识
1.程序格式加工程序通常由程序开始、程序内容和程序结束等三部分组成。
程序开头为程序号,用于加工程序的开始标识,程序号通常由字符“%”及其后的四位数字表示。
程序结束可用辅助功能M02(程序结束)、M30(程序结束,返回起点)等来表示。
程序的主要内容由若干个程序段(BLOCK)组成,程序段是由一个或若干个信息字组成,每个信息字又是由地址符和数据符字母组成。
信息字是指令的最小单位。
2.程序段格式目前常用的是字地址程序段格式,应用标准是JB3832-85。
下面是一个典型的字地址程序段格式:N001 G01 X60.0 Z-20.0 F150 S200 T0101 M03 LF其中,N001―表示第一个程序段G01―表示直线插补X60.0 Z-20.0―分别表示X,Z坐标方向的移动量F,S,T―分别表示进给速度、主轴转速、刀具号M03―表示主轴按顺时针方向旋转LF―表示程序段结束3.数控系统中的基本功能代码(1)程序段序号:N10、N20…(2)准备功能:G00-G99 是使数控装置作某种操作的功能。
G代码分为模态代码和非模态代码两种。
所谓模态代码是指某一G代码(G01)一经指定就一直有效,直到后边程序段中使用同组G代码(G03)才能取代它。
而非模态代码只在指定的本程序段中有效,下一段程序需要时必须重写(如G04)。
1)快速点定位指令G00G00指令是模态代码,它命令刀具分别以点定位控制方式从刀具所在点快速运动到下一个目标位置。
它只是快速定位,而无运动轨迹要求。
其指令书写格式是:G00 X_Z_;刀具实际的运动路线不是直线,而是折线,所以使用G00指令时要注意刀具是否和工件急夹具发生干涉,忽略这一点,就容易发生碰撞,而在快速状态下的碰撞更加危险。
2)直线插补指令G01直线插补指令是直线运动指令,也是模态代码。
它命令刀具在两坐标或三坐标间以插补联动方式按指定的F进给速度(单位为mm/min)作任意斜率的直线运动。
数控车床指令大全
• 3) G99 F__进给速度单位是每转进给量 (mm/r),范围0.0001~500.0000(mm/r), 系统默认; • 4) G32/G76/G92 F__ 指定螺纹的螺距, 范围0.0001~500.0000(mm/r)。
• 5) 借助于机床控制面板上的倍率按键, F可在一定范围内进行修调,当执行螺纹 切削循环G76、G92及螺纹切削G32 时,倍率开关失效,进给倍率固定在 100%。 • 6) F为续效指令,直到被新的 F值所取 代,而工作在 G00方式下,快速定位的 速度是各轴的最高速度,与所编 F无关。
• 准备功能G代码 • 准备功能 G指令由 G后一或二位数值组成, 它用来规定刀具和工件的相对运动轨迹、 机床坐标系、坐标平面、刀具补偿、坐标 偏置等多种加工操作。 • G 功能根据功能的不同分成若干组,其中 00组的G 功能(G04、G28、G70-G76) 称非模态 G 功能,其余组的称模态G功能。
图 3 G02/G03 参数说明
例1: 如图所示,加工圆弧AB、BC,加工路线为C→B→A, 采用圆心和终点(I、K)的方式编程。
1)绝对编程
N20 N30
G03 X120. Z70. I0 K-40.;加工BC G02 X88. Z38. I0 K-20.;加工AB
G00 X40. Z110.; G03 U80. W-40. I0 K-40. F200;(R40) G02 U-32. W-32. I0 K-20.;(R20)
• M03,M04和M05为一组指令,在执行时 一直有效,直到被同组的指令取代,如指 令M03被M04(或M05)取代。 • 编程举例: 设置刀具进给速度为 400mm/min,主轴转速为300r/min,主 轴正转,刀具沿直线插补,主轴反转,刀 具继续沿直线插补,编程如下:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三大数控系统G代码快速通读
一、数控车床系统G代码
×为本软件中不能用现象表达的指令
G功能字含义
FANUC数控系统
SIEMENS数控系统
华中数控系统
快速进给、定位
G00
G0
G00
直线插补
G01
G1
G01
圆弧插补CW(顺时针)
G02
G2
G02
圆弧插补CCW(逆时针)
G03
G3
G94
×
每转进给速度
G99
G95
G95
×
恒线速度切削
G96
G96
G96
×
恒线速度控制取消
G97
G97
G97
×
二、数控铣床系统G代码
×为本软件中不能用现象表达的指令
G功能字含义
FANUC数控系统
SIEMENS数控系统
华中数控系统
快速进给、定位
G00
G0
G00
直线插补
G01
G1
G01
圆弧插补CW(顺时针)
G03
暂停
G04
G04
英制输入
G20
G70
G20
×
公制输入
G21
G71
G21
回归参考点
G28
G74
G28
由参考点回归
G29
G29
返回固定点
G75
直径编程
--
G23
G36
半径编程
--
G22
G37
刀具补偿取消
G40
G40
G40
左半径补偿
G41
G41
G41
右半径补偿
G42
G42
G42
设定工件坐标系
G50
G92
深孔钻削循环
GБайду номын сангаас3
G83
右螺旋切削循环
G84
G84
镗孔循环
G85
G85
镗孔循环
G86
G86
反向镗孔循环
G87
G87
镗孔循环
G88
G88
镗孔循环
G89
G89
绝对编程
G90
G90
G90
相对编程
G91
G91
G91
设定工件坐标系
G92
G92
固定循环返回起始点
G98
G98
返回固定循环R点
G99
G99
返回编辑状态>>
G56
G56
G56
选择工作坐标系4
G57
G57
G57
选择工作坐标系5
G58
G58
选择工作坐标系6
G59
G59
坐标系旋转
G68
G68
×
取消坐标系旋转
G69
G69
×
高速深孔钻削循环
G73
G73
左螺旋切削循环
G74
G74
精镗孔循环
G76
G76
取消固定循环
G80
G80
中心钻循环
G81
G81
反镗孔循环
G82
G82
G40
G40
G40
左半径补偿
G41
G41
G41
右半径补偿
G42
G42
G42
刀具长度补偿+
G43
G43
刀具长度补偿-
G44
G44
刀具长度补偿取消
G49
G49
取消缩放
G50
G50
×
比例缩放
G51
G51
×
机床坐标系选择
G53
G53
G53
选择工作坐标系1
G54
G54
G54
选择工作坐标系2
G55
G55
G55
选择工作坐标系3
G02
G2
G02
圆弧插补CCW(逆时针)
G03
G3
G03
暂停
G04
G04
选择XY平面
G17
G17
G17
选择XZ平面
G18
G18
G18
×
选择YZ平面
G19
G19
G19
×
英制输入
G20
G70
G20
×
公制输入
G21
G71
G21
回归参考点
G28
G74
G28
由参考点回归
G29
G29
返回固定点
G75
刀具补偿取消
内外径粗切复合循环
G71
G71
端面粗切削复合循环
G72
G72
闭环车削复合循环
G73
LCYC95
G73
螺纹切削复合循环
G76
G76
外园车削固定循环
G90
G80
端面车削固定循环
G94
G81
螺纹车削固定循环
G92
LCYC97
G82
绝对编程
---
G90
G90
相对编程
---
G91
G91
每分钟进给速度
G98
G94
设置主轴最大的转速
G50
G26上限 G25下限
--
×
选择机床坐标系
G53
G53
G53
选择工作坐标系1
G54
G54
G54
选择工作坐标系2
G55
G55
G55
选择工作坐标系3
G56
G56
G56
选择工作坐标系4
G57
G57
G57
选择工作坐标系5
G58
G58
选择工作坐标系6
G59
G59
精加工复合循环
G70
G70