直线插补指令编程
直线插补
了解直线插补的使用方法。 掌握G01格式中参数的含义及走刀方向和路线。 了解圆弧插补的方法及格式中的各参数的含义。 能判断顺时针、逆时针圆弧插补的方向。
情境导入
加工下图零件
我们用何指令?
任务描述
知识准备
一、直线插补G01
G01是使刀具以指令的进给速度沿直线移动到目标点。
(1).指令格式为:G01 X(U)___Z(W)___F___; 其中:X、Z表示目标点绝对值坐标; U、W表示目标点相对前一点的增量坐标; F表示进给量,若在前面已经指定,可以省略。 通常,在车削端面、沟槽等与x轴平行的加工时, 只需单独指定X(或U)坐标;在车外圆、内孔等与 Z轴平行的加工时,只需单独指定Z(或W)值。 右图为同时指令两轴移动车削锥面的情况, 用G01编程为:
N50 G01 X20 Z-2 F0.1;
N60 Z-20; N70 X40 Z-30 N80 G00 X150 Z100; N90 M05 T0100; N100 M30;
同步训练
如下图,工件已粗加工完毕,各位置留有余量0.2mm,要求重新编写精加工程序, 不切断。
任务评价
考核评价记录表
过程考核(30%) 职业态度 (10%) 组织纪律 (10%) 团队合作 (10%) 结果考核(70%)
绝对坐标编程方式:G01 X80.0 Z-80.0F0.25 增量坐标编程方式:G01 U20.0 W-80.0F0.25 说明: ①G01指令后的坐标值取绝对值编程还是取增量值编程,由尺寸字地址 决定,有的数控车床由数控系统当时的状态决定。 ②进给速度由F指令决定.F指令也是模态指令,它可以用GOO指令取消。 如果在G01程序段之前的程序段没有F指令,而现在的G01程序段中也没 有F指令,则机床不运动。因此,G01程序中必须含有F指令。
数控车床编程实例 100
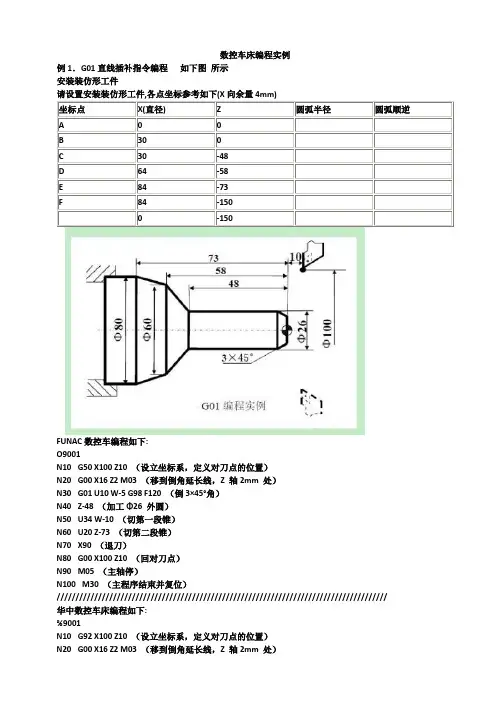
数控车床编程实例例1.G01直线插补指令编程如下图所示安装装仿形工件请设置安装装仿形工件,各点坐标参考如下(X向余量4mm)坐标点X(直径)Z圆弧半径圆弧顺逆A00B300C30-48D64-58E84-73F84-1500-150FUNAC数控车编程如下:O9001N10G50 X100 Z10 (设立坐标系,定义对刀点的位置)N20G00 X16 Z2 M03 (移到倒角延长线,Z 轴2mm 处)N30G01 U10 W-5 G98 F120 (倒3×45°角)N40Z-48 (加工Φ26 外圆)N50U34 W-10 (切第一段锥)N60U20 Z-73 (切第二段锥)N70X90 (退刀)N80G00 X100 Z10 (回对刀点)N90M05 (主轴停)N100M30 (主程序结束并复位)////////////////////////////////////////////////////////////////////////////////////////华中数控车床编程如下:%9001N10G92 X100 Z10 (设立坐标系,定义对刀点的位置)N20G00 X16 Z2 M03 (移到倒角延长线,Z 轴2mm 处)N30G01 U10 W-5 F300 (倒3×45°角)N40Z-48 (加工Φ26 外圆)N50U34 W-10 (切第一段锥)N60U20 Z-73 (切第二段锥)N70X90 (退刀)N80G00 X100 Z10 (回对刀点)N90M05 (主轴停)N100M30 (主程序结束并复位)===============================================================例2.G02/G03圆弧插补指令编程,如下图安装装仿形工件请设置安装装仿形工件,各点坐标参考如下(X向余量3mm)坐标点X(直径)Z圆弧半径圆弧顺逆A00B60C30-24183D32-3182E32-40F45-4045-1000-100FUNAC数控车编程如下:O9002N10 G50 X40 Z5(设立坐标系,定义对刀点的位置)N20 M03 S400 (主轴以400r/min旋转)N25 G50 S1000(主轴最大限速1000r/min旋转)N30 G96 S80 (恒线速度有效,线速度为80m/min)N40 G00 X0 (刀到中心,转速升高,直到主轴到最大限速)N50 G01 Z0 G98 F60 (工进接触工件)N60 G03 U24 W-24 R15 (加工R15 圆弧段)N70 G02 X26 Z-31 R5 (加工R5 圆弧段)N80 G01 Z-40 (加工Φ26 外圆)N90 X40 Z5 (回对刀点)N100 G97 S300 (取消恒线速度功能,设定主轴按300r/min 旋转)N110 M30 (主轴停、主程序结束并复位)///////////////////////////////////////////////////////////////////////////////////////////////////////// //////////////////华中数控车床编程如下:%9002N10 G92 X40 Z5(设立坐标系,定义对刀点的位置)N20 M03 S400 (主轴以400r/min旋转)N40 G00 X0 (刀到中心,转速升高,直到主轴到最大限速)N50 G01 Z0 F60 (工进接触工件)N60 G03 U24 W-24 R15 (加工R15 圆弧段)N70 G02 X26 Z-31 R5 (加工R5 圆弧段)N80 G01 Z-40 (加工Φ26 外圆)N90 X40 Z5 (回对刀点)N100 M30 (主轴停、主程序结束并复位)====================================================================例3G32螺纹切削指令编程如下图格式:G32 X(U)__Z(W)__F__说明:X、Z:为绝对编程时,有效螺纹终点在工件坐标系中的坐标;U、W:为增量编程时,有效螺纹终点相对于螺纹切削起点的位移量;F:螺纹导程,即主轴每转一圈,刀具相对于工件的进给值;使用G32指令能加工圆柱螺纹、锥螺纹和端面螺纹。
数控铣床编程指令

数控铣床编程指令 Prepared on 24 November 2020数控铣床编程指令4.2.2子程序1、坐标轴运动(插补)功能指令(1)点定位指令G00点定位指令(G00)为刀具以快速移动速度移动到用绝对值指令或增量值指令指定的工件坐标系中的位置。
指令格式:G00X—Y—Z一;式中X—Y—Z一为目标点坐标。
以绝对值指令编程时,刀具移动到终点的坐标值;以增量值指令编程时,指刀具移动的距离,用符号表示方向。
使用G00指令用法如下。
如上图所示,刀具由A点快速定位到B 点其程序为:G00G90X120.Y60.;(绝对坐标编程)(2)直线插补指令G01用G01指定直线进给,其作用是指令两个坐标或三个坐标以联动的方式,按指定的进给速度F,从当前所在位置沿直线移动到指令给出的目标位置,插补加工出任意斜率的平面或空间直线。
指令格式:G0lX—Y—Z—F一;程序段G01X10.Y20.Z20.F80.使刀具从当前位置以80mm/min的进给速度沿直线运动到(10,20,20)的位置。
例3:假设当前刀具所在点为.,则如下程序段N1G;.;将使刀具走出如图所示轨迹。
(3)圆弧插补指令G02和G03G02表示按指定速度进给的顺时针圆弧插补指令,G03表示按指定速度进给的逆时针圆弧插补指令。
顺圆、逆圆的判别方法是:沿着不在圆弧平面内的坐标轴由正方向向负方向看去,顺时针方向为G02,逆时针方向为G03,序格式:XY平面:G17G02X~Y~I~J~(R~)F~G17G03X~Y~I~J~(R~)F~ZX平面:G18G02X~Z~I~K~(R~)F~G18G03X~Z~I~K~(R~)F~G19G02Z~Y~J~K~(R~)F~G19G03Z~Y~J~K~(R~)F~式中X、Y、Z为圆弧终点坐标值,可以用绝对值,也可以用增量值,由G90或G91决定。
由I、J、K方式编圆弧时,I、J、K表示圆心相对于圆弧起点在X、Y、Z轴方向上的增量值。
(完整版)数控车床编程指令代码
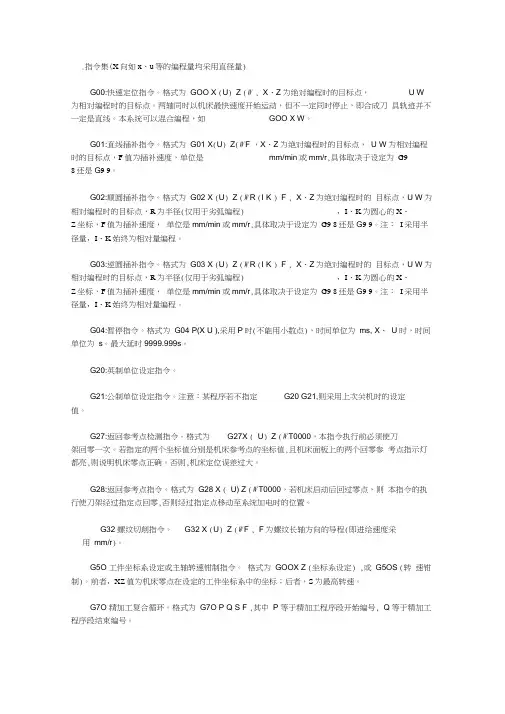
.指令集(X向如x、u等的编程量均采用直径量)G00:快速定位指令。
格式为GOO X (U) Z (W , X、Z为绝对编程时的目标点,U W 为相对编程时的目标点。
两轴同时以机床最快速度开始运动,但不一定同时停止,即合成刀具轨迹并不一定是直线。
本系统可以混合编程,如GOO X W。
G01:直线插补指令。
格式为G01 X(U) Z(W F ,X、Z为绝对编程时的目标点,U W为相对编程时的目标点,F值为插补速度,单位是mm/min或mm/r,具体取决于设定为G98还是G9 9。
G02:顺圆插补指令。
格式为G02 X (U) Z (W R (I K ) F , X、Z为绝对编程时的目标点,U W为相对编程时的目标点,R为半径(仅用于劣弧编程) ,I、K为圆心的X、Z坐标,F值为插补速度,单位是mm/min或mm/r,具体取决于设定为G9 8还是G9 9。
注:I采用半径量,I、K始终为相对量编程。
G03:逆圆插补指令。
格式为G03 X (U) Z (W R (I K ) F , X、Z为绝对编程时的目标点,U W为相对编程时的目标点,R为半径(仅用于劣弧编程) ,I、K为圆心的X、Z坐标,F值为插补速度,单位是mm/min或mm/r,具体取决于设定为G9 8还是G9 9。
注:I采用半径量,I、K始终为相对量编程。
G04:暂停指令。
格式为G04 P(X U ),采用P时(不能用小数点),时间单位为ms, X、U时,时间单位为s。
最大延时9999.999s。
G20:英制单位设定指令。
G21:公制单位设定指令。
注意:某程序若不指定G20 G21,则采用上次关机时的设定值。
G27:返回参考点检测指令。
格式为G27X ( U) Z (W T0000,本指令执行前必须使刀架回零一次。
若指定的两个坐标值分别是机床参考点的坐标值,且机床面板上的两个回零参考点指示灯都亮,则说明机床零点正确。
否则,机床定位误差过大。
G28:返回参考点指令。
数控车床 直线插补G01 圆弧插补G02,G03ppt课件
17 返回
* 1.用圆心半径R指定圆心位置,其指令格式为:
G02/G03 X(U) Z(W) R F; 2.用圆心坐标(I,K)指定圆心位置,其指令格式为:
G02/G03 X(U) Z(W) I K F;
参数含义:
R——圆弧半径。
I、K——圆心相对于圆弧起点的增量坐标,I为
半径增量(即X方向增量),K为Z方向增量。
上一页 下一页
24 返回
参考程序
O....; G00 X80 Z80 ; M03 S1000 T0100;
G00 X20 Z3 ; G01 Z0 F80; X24 Z-2 ; Z-12; G03 X40 W-8 R8; G01 Z-70;
G00 X80 Z80 ; M05 T0202; S500 M03;
G00 X45 Z-33; G01 X40 F50; G02 X20 W-10 R10; G01 Z-60; X40;
注释
程序名 快速定位至安全换刀点(刀具起点) 使用1号基准刀,主轴正转,转速1000r/min
精车A--J点的轮廓
快速返回刀具起点 主轴停止,换2号切断刀,刀宽为3 mm 主轴正转,转速500r/min
G01用于刀具直线插补运动。它是通过程序段中的信息,使机床各坐标 轴上产生与其移动距离成比例的速度。其运动轨迹如下:G01指令的运动轨 迹按切削进给速度运行,以一定的的切削进给速度,刀具从起点沿直线切 削到目标点。
上一页 下一页
5 返回
上一页 下一页
6 返回
上一页 下一页
7 返回
B
D
A
C E F
程序名
快速定位至安全换刀点(刀具起点)
使用1号基准刀,主轴正转,转速1000r/min
机器人现场编程-运动命令
一、运动命令- HMOVE
指令格式: HMOVE 位姿变量, 夹紧编号 功 能:移动机器人至指定位姿。机器人按混合运动方式运动:主要轴为
直线插补,腕关节为关节插补。 参 数:
位姿变量:指定机器人运动的目标位姿。(可以是变换值变量、复合变换值变量、 关节位移值变量或位姿信息函数)
夹紧编号:指定在目标位姿处要打开或闭合的夹紧编号。正数字闭合夹紧,负数 字打开夹紧。任何夹紧编号都设置到HSETCLAMP 命令(或辅助函数 0605)设置的最大值。如果省略,夹紧既不打开也不闭合。
即使未到达指定的位姿,机器人也会停止运动,并跳转到下一步骤。 参 数:
模式:(不是指定项)监视指定输入信号的上升沿或下降沿。正信号编号监视上升 沿,负编号监视下降沿。
/ERR :(选项)如果信号条件在监视开始之前已经置位,则会返回一个错误信息。 /LVL : (选项)如果信号条件在监视开始之前已经置位,则立即跳转到下一步骤。 位姿变量: 指定机器人运动的目标位姿(可以是变换值变量、复合变换值变量、关
#c
#e
C2MOVE #c
C1MOVE #d
#a
C2MOVE #e 圆弧 c、d、e
#d
一、运动命令-C1MOVE / C2MOVE
示例3:
LMOVE #p1 C1MOVE #p2 圆弧 p1、p2、p3
p2
p4
C1MOVE #p3 圆弧 p2、p3、p4
C2MOVE #p4
p1
p3
一、运动命令-HOME
运动命令
一、运动命令
基本运动命令 JMOVE 以关节(各轴)插补动作移动机器人 LMOVE 以直线插补动作移动机器人 C1MOVE 以圆弧插补动作移动 C2MOVE 以圆弧插补动作移动 HOME 移动到原点位姿 DELAY 停止机器人运动指定长度的时间
直线插补G01
调定的快进速度,快速移动到程序段所指令
的下一个定位点。
注意:G00的运动轨迹不一定是直线,若不
注意则容易干涉。
2. G01指令——直线插补指令
▢ 编程格式:G01 X_a_ Z_c_ F_f_
▢ 功能:指令多坐标(2坐标)以联动的方式,
按程序段中规定的合成进给速度f,使刀具相
对于工件按直线方式,由当前位置移动到程
序段中规定的位置(a、c)。当前位置是直 线的起点,为已知点,而程序段中指定的坐 标值即为终点坐标。
P218 图2
• 假设棒料直径为25 长度为150 在不分刀的情况下,仅使用直线插补G01指 令加工零件请同学们编写加工程序
直线插补G01
指令字 G00 G01 G02 G03
组 01
别
功
能
备
ห้องสมุดไป่ตู้
注 摸态G指令
快速移动 直线插补 圆弧插补(逆时针) 圆弧插补(顺时针)
G32 G90
G92 G94
螺纹切削 轴向切削循环
螺纹切削循环 径向切削循环
一、与控制方式有关的指令
1、G00 指令——快速定位指令
▢ ▢
编程格式:G00 X__ Y__ Z__ *
数控车床编程实例大全
N6U20Z-73 (切第二段锥)
N7 X90 (退刀)
N8 G00X100Z10 (回对刀点)
N9M05 (主轴停)
N10M30(主程序结束并复位)
数控车床编程实例三:圆弧插补G02/G03指令数控编程
圆弧插补指令编程零件图样
%3308
N1 G92X40 Z5(设立工件坐标系,定义对刀点得位置)
N9M30(主轴停、主程序结束并复位)
数控车床编程实例四:倒角指令数控编程
%3310
N10 G92 X70 Z10(设立坐标系,定义对刀点得位置)
N20G00 U-70W-10(从编程规划起点,移到工件前端面中心处)
N30G01 U26C3F100(倒3×45°直角)
N40W-22 R3(倒R3圆角)
N11M30(主轴停、主程序结束并复位)
数控车床编程实例八:G80指令数控编程
G80指令数控编程零件图样
%3317
M03S400(主轴以400r/min旋转)
G91G80X-10 Z-33I—5.5F100(加工第一次循环,吃刀深3mm)
X-13Z-33I-5、5(加工第二次循环,吃刀深3mm)
X—16Z—33I-5、5(加工第三次循环,吃刀深3mm)
N18X50Z120(回对刀点)
N19M05(主轴停)
N20M30(主程序结束并复位)
数控车床编程实例七:恒线速度功能数控编程
恒线速度功能编程零件图样
%3314
N1 G92X40 Z5(设立坐标系,定义对刀点得位置)
N2 M03 S400(主轴以400r/min旋转)
N3 G96S80 (恒线速度有效,线速度为80m/min)
数控铣床基本编程指令
数控铣床基本编程指令1. 简介数控铣床是一种自动化加工设备,通过预先编写的指令控制刀具在工件表面上进行切削加工。
这些指令被称为数控铣床编程指令,是数控铣床能够自动执行加工操作的关键。
本文将介绍数控铣床的基本编程指令,帮助读者了解如何编写和使用这些指令。
2. G代码和M代码在数控铣床编程中,最常用的两种指令是G代码和M代码。
•G代码:用于定义刀具的运动方式和加工路径。
例如,G00表示快速移动,G01表示直线插补,G02表示圆弧插补等。
•M代码:用于定义刀具的辅助功能和机床的控制指令。
例如,M03表示主轴正转,M05表示主轴停止等。
3. 基本编程指令3.1 设置工作坐标系在开始进行数控铣床编程之前,需要先设置工作坐标系。
通过指令G92可以将当前位置设置为工作坐标系的原点。
例:G92 X0 Y0 Z03.2 快速移动快速移动是指刀具在不加工的情况下进行的高速移动。
通过指令G00可以实现快速移动。
例:G00 X100 Y100 Z103.3 直线插补直线插补是指刀具在两个点之间直接移动。
通过指令G01可以实现直线插补。
例:G01 X50 Y50 Z5 F1003.4 圆弧插补圆弧插补是指刀具沿着指定的圆弧路径进行移动。
通过指令G02和G03可以实现圆弧插补。
例:G02 X50 Y50 Z5 I25 J0 F1003.5 停止主轴停止主轴是指停止刀具的旋转。
通过指令M05可以实现停止主轴的功能。
例:M053.6 开始主轴开始主轴是指启动刀具的旋转。
通过指令M03可以实现开始主轴的功能。
例:M03 S10003.7 改变刀具改变刀具是指更换刀具的操作。
通过指令T可以实现改变刀具的功能。
例:T023.8 结束程序结束程序是指终止数控铣床的加工操作。
通过指令M30可以实现结束程序的功能。
例:M304. 示例程序下面是一个简单的示例程序,演示如何使用基本编程指令进行数控铣床的加工。
G92 X0 Y0 Z0G00 X100 Y100 Z10G01 X50 Y50 Z5 F100G02 X50 Y50 Z5 I25 J0 F100M05M03 S1000G01 X0 Y0 Z0 F100M305. 总结本文介绍了数控铣床的基本编程指令,包括设置工作坐标系、快速移动、直线插补、圆弧插补、停止主轴、开始主轴、改变刀具和结束程序等。
法兰克数控车床常用G指令编写
法兰克数控车床常用G指令编写数控编辑G代码是数控编程人员在生产加工过程中当用到的指令代码,期格式都有严格的规范约束,数控G代码也是机床实现正常工作的核心,牢记并熟练运用数控G代码是一个合格的数控编程人员所必须掌握的一门技能。
下面就日常数控加工过程中所使用到的G代码加以详细说明:◆G00—快速定位格式:G00 X(U)__Z(W)__说明:(1)该指令使刀具按照点位控制方式快速移动到指定位置。
移动过程中不得对工件进行加工。
(2)所有编程轴同时以参数所定义的速度移动,当某轴走完编程值便停止,而其他轴继续运动。
(3)不运动的坐标无须编程。
(4)G00可以写成G0例:G00 X75 Z200G0 U-25 W-100 先是X和Z同时走25快速到A点,接着Z向再走75快速到B点。
◆G01—直线插补格式:G01 X(U)__Z(W)__F__(mm/min) 说明:(1)该指令使刀具按照直线插补方式移动到指定位置。
移动速度是由F指令进给速度。
所有的坐标都可以联动运行。
(2)G01也可以写成G1例:G01 X40 Z20 F150 两轴联动从A点到B点◆G02—逆圆插补格式1:G02 X(u)____Z(w)____I____K____F_____ 说明:(1)X、Z在G90时,圆弧终点坐标是相对编程零点的绝对坐标值。
在G91时,圆弧终点是相对圆弧起点的增量值。
无论G90,G91时,I和K均是圆弧终点的坐标值。
I是X 方向值、K是Z方向值。
圆心坐标在圆弧插补时不得省略,除非用其他格式编程。
(2)G02指令编程时,可以直接编过象限圆,整圆等。
注:过象限时,会自动进行间隙补偿,如果参数区末输入间隙补偿与机床实际反向间隙悬殊,都会在工件上产生明显的切痕。
(3)G02也可以写成G2。
例:G02 X60 Z50 I40 K0 F120 格式2:G02 X(u)____Z(w)____R(+\-)__F__ 说明:(1)不能用于整圆的编程(2)R为工件单边R弧的半径。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图3-1 G00定位轨迹图
3-2 绝对、相对、混合编程实例
表3-1 绝对、相对、混合编程方法表 绝对编程(G90) 相对编程 混合编程 G00 G00 G00 G00 X70 U40 U40 X70 Z40
快速定位
1、G00指令格式:G00 X(U)_ Z(W)_ 式中:X、Z:绝对编程时,目标点在工件坐标系中的坐标; U、W:增量编程时刀具移动的距离。 2、G00指令刀具相对于工件以各轴预先设定的速度,从当前位置快速移动到程序段指令的 定位目标点。 3、G00指令中的快移速度由机床参数“快移进给速度”对各轴分别设定,所以快速移动速 度不能在地址F中规定,快移速度可由面板上的快速修调按钮修正。
W60
Z40
W60
直线插补
G01直线插补
G01代码用于刀具直线插补运动。功能:G01指令使刀具以一定的进给速度,从所在点出 发,直线移动到目标点。
指令格式:G01 X(U)_ Z(W)_ F
式中:X、Z:为绝对编程时目标点在工件坐标系中的坐标; U、W:为增量编程时目标点 坐标的增量;F:进给速度。
G00X43.0Z2.0 Z0 G01X-1.0 G00X35.5Z2.0 G01Z-55.0 U3.0 G00Z2.0 X31.0 G01Z-20.0 X35.5Z-40.0
程序初态设定
快速定位 进刀 平端面 进刀 粗加工35外圆 退刀 返回 进刀 粗加工28外圆 粗加工圆锥
G00Z2.0
X28.5 G01Z-20.0 X35.0Z-40.0 G00Z2.0 X100.0Z100.0 M05 M00
数控机床操作入门
模块三 单一指令加工应用
主讲 张卫卫
洛阳职业技术学院
课题一 G00 G01编程及加工
知识、技能目标
快速定位G00 直线插补G01 操作实训 小 结
知识、技能目标
知识目标
掌握G00、G01指令的编程格式及特点。
掌握简单形面的程序设计思想和方法。
技能目标
通过对简单零件的加工,能熟练使用数控车床面板的各功能键。 通过车削带圆柱、圆锥、倒角的工件,培养学生基本操作技能, 养成安全、文明生产的习惯。
操作实训
在数控车床上编程加工如图3.5所示零件外轮廓, 工件材料:φ40mm棒料。
零件图工艺分析
制订加工工艺
1、选用T1 90°外圆刀,用G01加工各部外圆,ap:2.mm s:500r/min f:0.2mm/r 2、给精车留0.5mm余量。
编写加工程序
程序 O0302 说明 程序名
N1G40G97G99M03S01T0101F0.2
安全操作和注意事项
(1)装刀时,刀尖同工件中心高对齐,对刀前,先将工件端面车平。
(2)为保证精加工尺寸准确性,可分半精加工、精加工。
小 结
所有不同型号的数控车床、铣床都必须用到G00、G01指令,这 两个指令在所有数控系统中都通用。在数控车、铣床自动编程中, 任何平面、曲面加工的路径最后都是由直线、圆弧插补组成。所以 说,这两个指令是数控编程的最基本组成单元。 通过实训项目的学习,了解数控车床对刀与工件坐标系之间的 关系;通过半精加工、精加工掌握如何控制工件尺寸。
G01倒角、倒圆功能
G01倒角控制功能可以在两相邻轨迹的程序段之间插入直线倒角或圆弧倒角。 指令格式:G01 X(U) Z(W) C_ (直线倒角) G01 X(U) Z(W) R_ (圆弧倒角) 式中:X、Z值为在绝对指令时,是两相邻直线的交点,即假想拐角交点(G点)的坐标值; U、W值为在增量指令时,是假想拐角交点相对于起始直线轨迹的始点E的移动距离。 C值是假想拐角交点(G点)相对于倒角始点(F点)的距离;R值是倒圆弧的半径值, 如图3-3所示
返回
进刀 粗加工28外圆 粗加工圆锥 返回 返回安全位 主轴停 程序 暂停
N2G40G97G99M03S02T0101F0.1 G00X43.0Z2.0 X24.0 G01Z0 X28.0Z-2.0 Z-20.0 X35.0Z-40.0 Z-55.0 U3.0 G00X100.0Z100.0 M05 M30
对刀 加工 尺寸检测
(4)对刀。 对刀操作时注意退刀方向,对刀完毕后用手动方 式验证刀补的准确性。 (5)自动加工。 操作方法:自动方式下,1)首件全程单段;2) 快速倍率最小F0,防止撞刀;3)主界面:既有程 序,又有坐标的界面。位置—翻页—翻页 (6)检测尺寸,完成加工。 加工后用量具检测各部尺寸,合格后切断工件完 成加工。
程序初态设定 快速定位 进刀 进刀 倒角 精加工28外圆 精加工圆锥 精加工35外圆 退刀 返回安全位 主轴停 程序结束并返回
输入程序 图形仿真
1)设置参数 录入→设置→设置→向下翻页(调整X、Z最大与 最小值) 2)图形仿真 刀补清零 S作图状态(默认T停止作图) 自动――主运动锁定――辅助运动锁定――单段 ――空运行――快速按钮-----循环启动 注意:图形仿真时一定从安全角度考虑,辅助运 动必须锁定。仿真完毕后,解除空运行及主、辅 运动。
图3-3 倒角指令示意图
4、在执行G00 指令时,由于各轴以各自的速度移动,不能保证各轴同时到达终点,因此 联动直线轴的合成轨迹不一定是直线,操作者必须格外小心,以免刀具与工件发生碰撞。 常见G00运动轨迹如图3-1 所示,从A点到B点常见有以下两种方式:直线AB、折线AEB。 折线的起始角 是固定的(如 = 22.5°或45°),它取决于各坐标的脉冲当量。