基于ARM的自主移动机器人控制系统设计
基于ARM的自主移动机器人控制系统设计
基于ARM的自主移动机器人控制系统设计陈剑斌;田联房;王孝洪【摘要】自主移动机器人是近年来研究热点,基于三节履带式机器人机械结构,提出了以ARM架构微处理器s3c2410为核心、多传感器的自主移动机器人控制系统,采用了Linux嵌入式操作系统作为S3c2410软件开发平台.微处理器外部扩展数字电路采用了CPLD来实现,减少了外围分立元件的使用及PCB面积,可靠性高、抗干扰能力强;基于Verilog语言对CPID进行了设计与实现.ARM与CPLD采用ISA总线方式通信,整个控制系统具有良好的可扩展性、硬件可裁剪性.通过爬楼梯、避障等实验,验证了机器人具有良好的自主移动性能.%Autonomous mobile robot is a new hot in recent years. A control system for autonomous mobile robot is proposed based on the mechanical structure of three tracked robot using ARM microprocessor S3c2410 as core with multi-sensors. Embed OS-Linux is adopted as a development platform for S3c2410 software.And the external expended distal circuits of microprocessor are realized by CPLD which program is designed by Verilog HDL,which reduces the use of external discrete components and PCB area,with high reliability and anti-interference ability.ARM communicates with CPLD by ISA bus, so the control system is of well scalability and pruning of hardware. The robot was tested by experiments such as climbing stair, avoiding obstacle, etc.to be good with autonomous mobility.【期刊名称】《机械设计与制造》【年(卷),期】2011(000)006【总页数】3页(P160-162)【关键词】自主移动机器人;多传感器;控制系统;ARM;CPLD【作者】陈剑斌;田联房;王孝洪【作者单位】华南理工大学,自动化学院,广州,510640;华南理工大学,自动化学院,广州,510640;华南理工大学,自动化学院,广州,510640【正文语种】中文【中图分类】TH16;TP2421 引言自主移动机器人是近年来研究热点,现今大多数移动式机器人存在越野能力差、自主性不够强、控制系统速度低或者占用空间大、功耗高、处理数据有限等缺点,满足不了高性能小型自主移动机器人的需求。
基于ARM的移动机器人控制系统设计
基于ARM的移动机器人控制系统设计作者:徐敏来源:《电脑知识与技术》2008年第35期摘要:该文主要介绍了基于ARM内核的S3C2410在移动机器人控制系统中的应用,通过传感器来感知外部环境信息,再通过路径规划做出决策进行运动。
同时,为了让机器人能够更好地完成任务,可以使外部计算机与机器人进行无线通信,借助于外部计算机做出决策实现远程操作,增强了系统的实时性和可靠性,实现了机器人的精确实时控制。
关键词:移动机器人;传感器;无线通信模块中图分类号:TP311文献标识码:A文章编号:1009-3044(2008)35-2356-03Design of Mobile Robotic Control System Based on ARMXU Min(Department of the Electronics Information Jiangsu College of Information Technology,Wuxi 214000,China)Abstract: This article introduced the application of S3C2410 based on the ARM core in the mobile robot control system. Through the sensor to get external environment information,then make the decision of exercise by path planning.And at the same time,may make external computer and the robot to carry on the wireless communication to let the robot complete the task well.With the aid of the decision-making from external computer to realizes the long-distance operation. It improves the system real-time performance and the system reliability, and also realizes the mobile robot precise real- time control.Key words:mobile robot;sensor;wireless communication module机器人是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合系统。
基于ARM9和Linux的机器人控制系统设计
基于ARM9和Linux的机器人控制系统设计引言现有智能机器人用直流电机作为驱动轮时一般都是用单片机或者高速的DSP等进行控制,而且同一机器人往往需用多个CPU来实现各自的功能,但随着对机器人的智能化要求越来越高,需要一种新的控制器(使用一个处理器)来满足机器人的各种行为要求,例如视频采集、无线通信。
本文介绍的利用ARM实现的智能机器人平台,为智能机器人的开发提供了一个新方法。
平台采用的ARM9是基于三星公司的S3C2410处理器,主频高达200 MHz,支持蓝牙、触摸屏以及USBHOST接口,可以传输高速图像。
嵌入式Linux系统是一个多用户操作系统,它允许多个用户同时访问系统而不会造成用户之间的相互干扰。
另外,Linux系统还支持真正的多用户编程,一个用户可以创建多个进程,并使各个进程协同工作来满足用户的需求。
Linux的引入使其他智能模块都以设备的形式存在,只有在用户需要的时候才调用相关设备驱动从而使数据融合更方便,运行多任务也更稳定。
利用ARM和嵌人式Linux 作为智能机器人平台具有很大的优势,但在国内还未发现用该平台开发智能机器人的系统。
本设计完成了对该系统驱动的初步编写,并通过实际验证,取得了良好效果。
1 驱动电路及测速方法1.1 总体结构及驱动电路系统的整体结构框图。
本设计采用的LMD18200的真值表如表1所列。
通过ARM的I/0口(例如D口的DO~3)来控制电机的工作状态。
1.2 测速方法 ARM没有捕获外部脉冲的计数器,它的定时器是用来计算内部脉冲的。
码盘输出信号接外部中断处理程序(EINTl)并设置上沿触发变量,在中断中设置一全局变量i,用i++累加。
设置定时器timer0,使它O.36 s产生1次内部定时器中断。
当一个定时器周期完成时引发定时器中断,在timer0中断中读出i的值,即得到O.36 s内码盘转动所产生的脉冲数;接着将i清零,为下一个定时器周期捕获脉冲作准备。
基于ARM的嵌入式移动机器人控制系统的设计
基于ARM的嵌入式移动机器人控制系统的设计嵌入式移动机器人控制系统是基于ARM架构设计的一种智能机器人控制系统,该系统具有灵活性高、性能稳定、功耗低等优点。
本文将从硬件设计和软件开发两个方面来详细介绍基于ARM的嵌入式移动机器人控制系统的设计。
硬件设计方面,嵌入式移动机器人控制系统的核心是基于ARM技术的处理器,可以选择低功耗、高性能的ARM Cortex-A9或Cortex-A53处理器。
处理器上可以集成多个内核,通过多核处理器的并行计算能力,可以提高机器人的实时性和响应速度。
此外,为了实现机器人的移动功能,还需要配备驱动电机的电机控制器和位置传感器,采用PWM控制技术来控制电机的转速和方向。
在软件开发方面,首先需要开发移动机器人的操作系统。
可以选择基于Linux的嵌入式操作系统,如Ubuntu的ARM版本或自主开发的实时操作系统。
操作系统可以负责机器人的任务管理和资源调度,提供良好的多任务处理能力。
其次,还需要设计适配机器人硬件的驱动程序,包括电机驱动、传感器驱动、通信驱动等。
驱动程序负责与硬件设备进行交互,将控制指令转化为相应的电信号或数据信号,并获取传感器的数据反馈。
最后,还需要进行机器人的应用开发,根据机器人的具体应用场景,开发相关的算法和控制逻辑,实现机器人的自主导航、路径规划、避障等功能。
在嵌入式移动机器人控制系统设计过程中,还需要考虑功耗管理、通信接口和外设模块等因素。
功耗管理是嵌入式系统设计中非常重要的一环,可以使用睡眠模式来降低功耗,还可以采用动态电压和频率调节的技术,根据系统负载的大小动态调整处理器的工作频率和电压。
通信接口方面,可以采用以太网、Wi-Fi、蓝牙等无线通信技术,实现机器人与外部设备的数据交换和控制指令的传输。
外设模块可以包括摄像头、激光雷达、超声波传感器等,通过外设模块可以实现机器人的感知和环境理解能力。
总之,基于ARM的嵌入式移动机器人控制系统的设计需要进行硬件设计和软件开发,并考虑功耗管理、通信接口和外设模块等因素。
基于ARM的教学机器人控制系统设计与实现.

基于ARM+μc/os Ⅱ的教学机器人控制系统设计与实现1.引言近年来随着人工智能技术、计算机技术等相关技术的发展,对智能机器人的研究越来越多。
在教育领域,许多院校已在学生中开设了机器人学方面的有关课程。
为了满足机器人学方面的有关课程教学示范和实验教学的需求,我们研制开发了全方位的轮式移动机器人,可以作为各种智能控制方法(包括动态避障、群体协作策略)的良好载体,同时又可以方便的构成网络化的分布式系统,开展多智能体的调度、规划等研究。
本文全面介绍了这种移动机器人的控制系统体系结构,包括传感器、通讯、伺服控制、软件构成等,并给出了实验结果,证明了系统的可行性。
2、机器人控制系统的硬件方案选择与设计本机器人控制器采用“主控器+伺服控制器”的形势。
伺服控制器负责完成单关节的位置闭环,在机器人控制中,要求运动平稳无超调,所以伺服控制器的运算任务很繁重。
主控制器主要完成除伺服控制器所作的位置闭环以外的所有工作,包括上位机命令接收,机器人状态监视、显示,根据一定的控制算法实现空间轨迹插补以及传感器信息综合处理等工作。
所以主控制器的任务也很繁重。
2.1 主控制器选择在移动教学机器人系统中, 应用工业计算机作为其控制系统核心成本高,体积大,功耗大,而采用8位或者16位单片机,又存在硬件资源有限、运算和处理速度有限的困扰,很难应用模糊控制等智能控制理论。
S3C44B0X是SAMSUNG公司推出的一个基于ARM7TDMI核的低功耗的高性价比的32位处理器,它可以在60MHZ频率下运行,采用3级流水线结构 [4] ,处理能力大大超过8/16位的单片机,接近PC机,可以支持大屏幕的液晶显示,提供功能强大的图形用户界面,另外基于ARM的控制器可以内嵌实时操作系统,克服了传统基于单片机的控制系统的软件“前后台”形式造成的实时性差的缺点[1][5]。
S3C44B0X有8个外部中断,两个带有握手协议的 UART接口,另外具有SPI和I2C接口、RTC和5个16位的PWM控制器、8路10位AD以及LCD控制器等[4]。
基于ARM的机器人套件控制系统设计

基于ARM的机器人套件控制系统设计学院自动化学院专业测控技术与仪器班级04070101学号2010040701021姓名王翰章指导教师卢艳军负责教师卢艳军沈阳航空航天大学2014年6月沈阳航空航天大学毕业设计(论文)摘要智能遥控避障循迹小车是基于ARM的创新实验教学平台所开发出的一款产品,既可以作为家庭智能清洁机器人,也可以在工厂仓库中作为沿固定线路运货的货运机器人。
采用先进的嵌入式系统开发,成为服务机器人里一个新的研究领域,具有很强的市场价值。
本设计的智能小车采用基于ARM7架构的LPC2138微处理器,设计开发了智能小车的控制系统,通过对超声波测距原理、红外线NEC协议、PWM舵机调速原理和LPC2138内部寄存器知识的掌握和合理配置,使小车集红外线遥控、超声波避障、红外对射管循迹三种功能于一体。
利用逻辑分析仪对小车三种功能的时序进行采集,根据采集到的时序设计程序,实现了利用红外遥控器对这三种方式的手动切换。
关键词:红外遥控;ARM7;超声波避障;红外对射管循迹基于ARM的机器人套件控制系统设计Title of Paper (in English)AbstractIntelligent Remote obstacle avoidance tracking car is based on ARM innovative experimental teaching platform. either as a family intelligent cleaning robot can also be used as cargo freight robot along a fixed line in warehouse, using advanced embedded systems technology, which become a new research field in service robots, with strong market value. The design of the intelligent car use LPC2138 ARM7 microprocessor architecture, through the principle of ultrasonic distance measurement, infrared NEC protocol, the principle of PWM and the reasonable configuration of LPC2138 internal registers, which also set three functions in one. I use a logic analyzer for collecting the sequence of time, according to the timing of the acquisition to achieve the use of infrared manual remote switching of these three founctions.Keywords:Infrared remote control;ARM7;Ultrasonic obstacle avoidance;Infrared ray tube tracking沈阳航空航天大学毕业设计(论文)目录1 绪论 (1)1.1 课题背景及研究的意义 (1)1.2 课题的研究现状 (1)1.3研究内容和论文的结构安排 (2)2传感器工作原理 (3)2.1主控芯片简介 (3)2.2光电传感器的工作原理 (3)2.3超声波测距的原理 (4)2.4红外通信基本原理 (5)2.5 NEC协议 (5)2.6舵机工作原理 (5)3 总体方案设计 (7)3.1超声波自动避障小车 (7)3.2手动遥控小车 (8)3.3自动循迹小车 (9)3.4利用红外遥控器实现对三种方式的手动切换 (10)4 软件功能设计 (11)4.1高低电平持续时间的捕获模型:按键持续时间采集 (11)4.2 红外编码值捕获程序 (13)4.3 超声波测距捕获程序 (16)4.4 舵机驱动程序 (17)4.5 三种方式切换程序 (18)5.系统调试分析 (20)5.1系统设计中的注意事项 (20)5.1.1外部因素 (20)5.1.2内部因素 (20)5.2硬软件总体调试 (20)基于ARM的机器人套件控制系统设计5.1.1硬件 (21)5.1.2软件 (21)参考文献 (22)致谢 (23)附录Ⅰ智能遥控循迹避障小车程序清单 (24)沈阳航空航天大学毕业设计(论文)1 绪论1.1 课题背景及研究的意义基于ARM7的机器人套件教学实验平台是一个专为学生提供的教学实验平台,鼓励学生亲自动手操作,按照自己的想法来设计硬件结构和软件编程,通过对机器人结构的不断设计、组装和对程序的不断修改、调试来使学生具有广阔的发挥余地并激发出学习热情和创造能力,能够广泛适用于机械、机电一体化、电气工程、自动化工程等方向的就业需求。
基于ARM的移动机器人组合导航系统设计与实现

( MI MU )a n d G P S r e c e i v e r . H a r d w a r e c o n i f g u r a t i o n a n d s o f t w a r e a r e i n t r o d u c e d i n d e t a i l , a n d K a l m a n i f l t e r i s
C o t r e x M4 一 b a s e d i n t e g r a t e d n a v i g a t i o n s y s t e m i s d e s i g n e d a n d r e a l i z e d w i t h mi c r o i n e r t i a l me a s u r e me n t u n i t
一 ‘
文献标识码 :A
文章编号 :1 0 0 0 - 9 7 8 7 ( 2 0 1 3 ) 0 2 - 0 1 0 2 - 0 3
De s i  ̄ n a nd n i l mp l e me n t a t i o n o f I mo b i l e r o bo b o t‘ t i n t e  ̄ g r a t e d
u s e d t o i mp l e me n t S I NS / G P S i n t e g r a t e d n a v i g a t i o n a l g o i r t h m. Th e i n t e g r a t e d n a v i g a t i o n s y s t e m i s i n s t a l l e d o n t h e mo b i l e r o b o t V o y a g e r — I I a n d t h e s y s t e m p e r f o r ma n c e i s e v a l u a t e d b y d i f f e r e n t i a l GP S . T h e e x p e i r me n t a l r e s u l t s h o w s t h a t t h i s n a v i g a t i o n s y s t e m h a s g o o d p r e c i s i o n a n d p r a c t i c a b i l i t y, i t r e a c h e s d e s i g n r e q u i r e me n t . Ke y wo r d s : AR M ;mi c r o i n e t r i a l me a s u r e me n t u n i t ;i n t e g r a t e d n a v i g a t i o n;Ka l ma n i f l t e in r g
基于ARM的移动机器人控制系统设计

基于ARM的移动机器人控制系统设计
徐敏
【期刊名称】《电脑知识与技术》
【年(卷),期】2008(004)035
【摘要】该文主要介绍了基于ARM内核的S3C2410在移动机器人控制系统中的应用,通过传感器来感知外部环境信息,再通过路径规划做出决策进行运动.同时,为了让机器人能够更好地完成任务,可以使外部计算机与机器人进行无线通信,借助于外部计算机做出决策实现远程操作,增强了系统的实时性和可靠性,实现了机器人的精确实时控制.
【总页数】3页(P2356-2358)
【作者】徐敏
【作者单位】江苏信息职业技术学院,电子信息工程系,江苏,无锡,214000
【正文语种】中文
【中图分类】TP311
【相关文献】
1.基于ARM的自主移动机器人控制系统设计 [J], 陈剑斌;田联房;王孝洪
2.基于ARM和μC/OS-Ⅱ的移动机器人控制系统设计 [J], 侯益坤;刘益标;侯聪玲
3.基于ARM和μC/OS-Ⅱ的移动机器人控制系统设计 [J], 马银戌
4.基于ARM9微处理器的移动机器人控制系统设计 [J], 宋广钢;李文锋;宋威
5.基于ARM的嵌入式移动机器人控制系统的设计 [J], 揭吁菡
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
能力强。其控制系统核心采用低功耗、主频高达 203MHz 的 ARM920T 架构微处理器 s3c2410,实现了运动控制、多个声纳距离 传感器与 CCD 图像采集对外部信息采集和上位机无线远程监控等
2
3
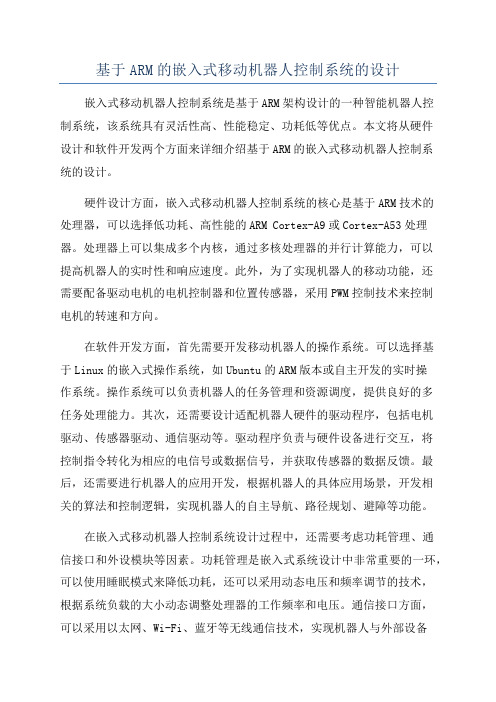
图 1 履带式机器人机械结构 1.关节 2.履带结构 3.内置 MAXON 电机 4.内置控制系统
机,采用并联差动转向方式,前后节分别由一个 MAXON 电机控 为 EPM7512AET144-10,它集成了 10 万个逻辑门、512 个宏单元
制其上下俯仰等动作,可以进行精确地左右摆头和上下俯仰等动 和 120 个 I/O 口资源,可以把数据缓存、电机控制、声纳传感器距
作,能适应攻角为 700 以内的大障碍,对(±20)mm 以内的凸凹地 离采样、逻辑转换等全部集成到 CPLD 中,节省大量的分立元件
图 3 ARM 与 CPLD 的总线通信实现框图
后保存在数据锁存器当中,待 ARM 来读取。
3.3 运动控制
CPLD 内部对 SRF04 回响脉冲信号脉宽采样的 Verilog 程序
电压模拟信号在传输过程中容易受干扰,长距离传输会衰 流程图,如图 5 所示。寄存器 2 代表障碍物最小距离信息,计数器 2
的功能进行了设计实现。
cm。SRF04 声纳模组工作原理:给予一个 10μs 脉宽的触发信号
D0-D15 data
ARM
/RD
(s3c2410) /WR
输入 输出 控制 逻辑
data_t
nGCS1
地址 /CS
A0-A11 address 译码器
clk
CPLD(EPM7512)
运动 控制 模块
声纳距离 采集模块
功能,可以很好的实现机器人自主移动。
2 机械结构
3 控制系统总体设计
控制系统核心采用 ARM920T 架构微处理器 s3c2410,这是
普通的轮式机器人只能适应其轮子半径以内的障碍,普通 一款由某公司推出的低价格、低功耗应用推出的 32 位 RISC 指
履带式机器人多数也只能适应 300 以内的攻角,且垂直越障高度 令集处理器,主频最高可达 203MHz,外接 64M 的 nandflash 闪存
机械设计与制造
第6期
160
Machinery Design & Manufacture
2011 年 6 月
文章编号:1001-3997(2011)06-0160-03
基于 ARM 的自主移动机器人控制系统设计 *
陈剑斌 田联房 王孝洪 (华南理工大学 自动化学院,广州 510640)
Design of control system for autonomous mobile robot based on ARM
制模块中,实现在城市街道、楼梯、斜坡、门栏、壕沟等复杂环境下 的使用,具有集成度高,硬件可裁剪等优点。
*来稿日期:2010-08-06 *基金项目:国家 863 计划资助项目(2008AA04Z213),广东省科技攻关项目基金资助(2005B10201006), 广州市科技攻关重点项目(2007Z2-D0031)
CHEN Jian-bin,TIAN Lian-fang,WANG Xiao-hong (School of Automation,South China University of Technology,Guangzhou 510640,China)
【摘 要】自主移动机器人是近年来研究热点,基于三节履带式机器人机械结构,提出了以 ARM 架构微处理器 s3c2410 为核心、多传感器的自主移动机器人控制系统,采用了 Linux 嵌入式操作系统作 为 S3c2410 软件开发平台。微处理器外部扩展数字电路采用了 CPLD 来实现,减少了外围分立元件的 使用及 PCB 面积,可靠性高、抗干扰能力强;基于 Verilog 语言对 CPLD 进行了设计与实现。ARM 与 CPLD 采用 ISA 总线方式通信,整个控制系统具有良好的可扩展性、硬件可裁剪性。通过爬楼梯、避障等 实验,验证了机器人具有良好的自主移动性能。
上位机 RS232 无线串
(人机交互)
口通信
无线串 CCD 口通信 摄像头
RS232
USB
核心处理器 ARM(s3c2410)
ISA 总线 硬件接口核心器件 CPLD(EPM7512)
光耦隔离+线路驱动
光耦隔离+线路驱动
负担,由此选用了具有过流保护、正反转控制、刹车、模拟信号调 速、(10~20)kHz 的脉宽调制 PWM 调速、霍尔速度闭环控制等功 能的直流无刷电机驱动器。控制过程如下:CPLD 接受到 ARM 电 机控制信号后,经地址译码片选,数据进入电机控制模块中,产生脉 宽调制 PWM、刹车、启停等信号,经 74HC244 线路驱动,TLP181 光 耦隔离,再经 MC1413 电流驱动进入直流无刷电机驱动器,驱动器 采用霍尔闭环控制方式驱动电机工作。
中图分类号:TH16,TP242 文献标识码:A
1 引言
自主移动机器人是近年来研究热点,现今大多数移动式机器 人存在越野能力差、自主性不够强、控制系统速度低或者占用空间
的行走、越障和作业等功能,越野能力强,可以适应各种恶劣的外
部环境。
1
4
大、功耗高、处理数据有限等缺点,满足不了高性能小型自主移动机
器人的需求。研究的履带式机器人采用三节履带式行走机构[1],越野
很小。研究的履带式机器人机械结构,如图 1 所示。采用三节履带 和 64M 的 sdram 内存,支持 USB、SPI、I2C、UART 等总线扩展方
式行走机构,长宽高分别为(980 ×250×100)mm,在机器人本体较 式,共有 117 个 I/O 口和 24 路外部中断,满足移动机器人控制系
小的情况下,选用了某公司 80W 大功率且体积小的直流无刷电 统的需求。硬件接口采用了某公司的 CPLD 作为核心器件,型号
电机速度采用脉宽调制 PWM 控制方式,其 Verilog 程序流 程图,如图 4 所示。寄存器 1 代表分频系数,CPLD 的 CLK 输入时 钟频率是 10M,PWM 输出频率是 20K,因此分频系数是 50,锁存 器 1 代表脉宽调制 PWM 的占空比信息,若占空比是 50%,则锁 存器 1 的值为 25。首先,当时钟信号 CLK 上升沿到来时,把从 ARM 接受到得脉宽调制 PWM 数据存入锁存器 1,计数器 1 加 1, 当计数器小于锁存器 1 时,PWM 输出管脚置为高电平;当计数器 1 大于锁存器 1 时,PWM 输出管脚置为低电平。然后,当计数器 1 小于寄存器 1 时,退出程序,等待下次 CLK 上升沿触发;当计数 器 1 大于等于寄存器 1 时,计数器 1 清 0,表示一个周期脉冲完 成,退出程序,等待下次 CLK 上升沿触发,产生一个新的脉冲。
图 4 脉宽调制 PWM 流程图
两端都输出数据受影响,接收到 ARM 数据之后,经片选进入运动 3.4 外部环境信息采集
控制模块或声纳距离采样模块,逻辑转换输出控制信号。当 ARM 3.4.1 声纳传感器距离采样
从 CPLD 中读数据时,data 作为输出端口,经地址线片选,数据从运
声纳传感器是机器人常用的障碍物测距模块,价格便宜,工
减,影响电机稳定工作,而电流模拟信号需要进行电压-电流的转 代表实际障碍物距离信息。首先,当时钟信号 CLK 上升沿到来时,
开始(clk 上升沿)
向锁存器 1 发送 PWM 脉宽数据
计数器 1 加 1
计数器 1>锁存器 1? Y
N 输出高电平 输出低电平
计数器 1>=寄存器 1? N
Y 计数器 1 清 0
ARM 通过双向数据传输总线读写 CPLD,当 ARM 向 CPL使 data 信号为高阻态[4],避免 ARM 和 CPLD
......
......
#1(PWM 刹车等) #8(PWM 刹车等) #1(触发及回响脉冲) #1(触发及回响脉冲)
后,产生一个 40kHz 的超声波,当超声波投射到障碍物而反射回 来时,SRF04 输出一回响脉冲信号,通过计算触发信号和回响信 号间的时间差,来判定与障碍物的距离。控制过程如下:CPLD 接 受到 ARM 检测信号后,产生 10μs 的触发脉冲,经 74HC244 线路 驱动和 TLP181 光耦隔离,触发 SRF04 工作,SRF04 返回一个脉 冲宽度与距离成正比的回响脉冲信号。CPLD 对回响信号处理之
动控制模块或声纳采集模块输出给 ARM。硬件描述语言 Verilog 语 作原理简单。声纳是利用声音在空气中传播速度和传播时间计算
法灵活、易懂、与 C 语言非常接近,可描述顺序执行和并行执行的 出与障碍物距离[3]。选用了 8 个 SRF04 声纳测距模组,均匀分布
程序结构。通过 QUARTUSⅡ开发平台,采用 Verilog 语言对 CPLD 在机器人中间一节的左、右、前三个方位,测距范围在(3~300)
关键词:自主移动机器人;多传感器;控制系统;ARM;CPLD 【Abstract】Autonomous mobile robot is a new hot in recent years.A control system for autonomous mobile robot is proposed based on the mechanical structure of three tracked robot using ARM microproces- sor S3c2410 as core with multi-sensors.Embed OS-Linux is adopted as a development platform for S3c2410 software.And the external expended digital circuits of microprocessor are realized by CPLD which program is designed by Verilog HDL,which reduces the use of external discrete components and PCB area,with high reliability and anti-interference ability.ARM communicates with CPLD by ISA bus,so the control sys- tem is of well scalability and pruning of hardware.The robot was tested by experiments such as climbing stair,avoiding obstacle,etc.to be good with autonomous mobility. Key words:Autonomous mobile robot;Multi-sensor;Control system;ARM;CPLD