第十六章 结构动力学复习题
(完整word版)结构动力学复习 新汇总(word文档良心出品)
结构动力学与稳定复习1.1 结构动力计算与静力计算的主要区别是什么?答:主要区别表现在:(1) 在动力分析中要计入惯性力,静力分析中无惯性力;(2) 在动力分析中,结构的内力、位移等是时间的函数,静力分析中则是不随时间变化的量;(3) 动力分析方法常与荷载类型有关,而静力分析方法一般与荷载类型无关。
1.2 什么是动力自由度,确定体系动力自由度的目的是什么?答:确定体系在振动过程中任一时刻体系全部质量位置或变形形态所需要的独立参数的个数,称为体系的动力自由度(质点处的基本位移未知量)。
确定动力自由度的目的是:(1) 根据自由度的数目确定所需建立的方程个数(运动方程数=自由度数),自由度不同所用的分析方法也不同;(2) 因为结构的动力响应(动力内力和动位移)与结构的动力特性有密切关系,而动力特性又与质量的可能位置有关。
1.3 结构动力自由度与体系几何分析中的自由度有何区别?答:二者的区别是:几何组成分析中的自由度是确定刚体系位置所需独立参数的数目,分析的目的是要确定体系能否发生刚体运动。
结构动力分析自由度是确定结构上各质量位置所需的独立参数数目,分析的目的是要确定结构振动形状。
1.4 结构的动力特性一般指什么?答:结构的动力特性是指:频率(周期)、振型和阻尼。
动力特性是结构固有的,这是因为它们是由体系的基本参数(质量、刚度)所确定的、表征结构动力响应特性的量。
动力特性不同,在振动中的响应特点亦不同。
1.5 什么是阻尼、阻尼力,产生阻尼的原因一般有哪些?什么是等效粘滞阻尼?答:振动过程的能量耗散称为阻尼。
产生阻尼的原因主要有:材料的内摩擦、构件间接触面的摩擦、介质的阻力等等。
当然,也包括结构中安装的各种阻尼器、耗能器。
阻尼力是根据所假设的阻尼理论作用于质量上用于代替能量耗散的一种假想力。
粘滞阻尼理论假定阻尼力与质量的速度成比例。
粘滞阻尼理论的优点是便于求解,但其缺点是与往往实际不符,为扬长避短,按能量等效原则将实际的阻尼耗能换算成粘滞阻尼理论的相关参数,这种阻尼假设称为等效粘滞阻尼。
结构动力学
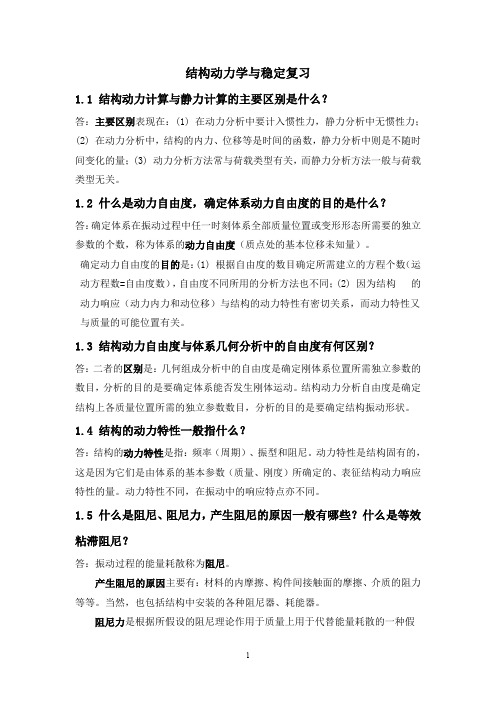
p
图 1 静力荷载作用简支梁
p(t)
惯性力
图 2 动力荷载作用简支梁
以这种方式抵抗结构加速度的惯性力,是结构动力学问题与静力学问题区别的更重要特征。 一般来说, 如果惯性力是结构内部弹性力所平衡的全部外荷载的一个重要部分, 解题时必须 考虑问题的动力特性。 2. 阻尼就是使自由振动衰减的各种摩擦和其他阻碍作用。 当结构的阻尼小鱼结构的临界阻尼时, 一般结构的自由振动振幅不断衰减, 最后振幅降为 0, 结构停止振动。当结构的阻尼大于临界阻尼时,结构的自由振动不会出现震荡,结构的振幅 直接降为 0。 典型结构体系的真实阻尼特性是很复杂和难确定的, 因此通常采用自由振动条件下的具有相 同衰减率的等效粘滞阻尼比ε来表示实际结构的阻尼。并且在建立结构的运动方程时,考虑 阻尼对于结构的作用,采用阻尼与速度的乘积作为结构的阻尼力。
பைடு நூலகம்
1. 答:结构动力问题在以下两个重要方面不同于静力问题。 一、根据定义,动力问题具有随时间变化的性质。由于荷载和反应随时间变化,显然动力问 题不像静力问题那样具有单一的解,而必须建立相应于反应过程全部时间的一系列解答; 二、下图叙述了静力问题和动力问题第二个、并且更重要的问题。如果图 1 所示的简支梁承 受静荷载 P,则它的弯矩、剪力和挠曲线形状直接依赖于给定的荷载,而且可根据力的平衡 原理求得。如果图 2 所示的荷载是动力荷载,则梁所产生的位移将于加速度有联系,而这些 加速度又产生与其反向的惯性力, 梁的弯矩和剪力不仅要平衡外荷载还要平衡由于梁的加速 度所引起的惯性力。
《结构动力学》考试复习题
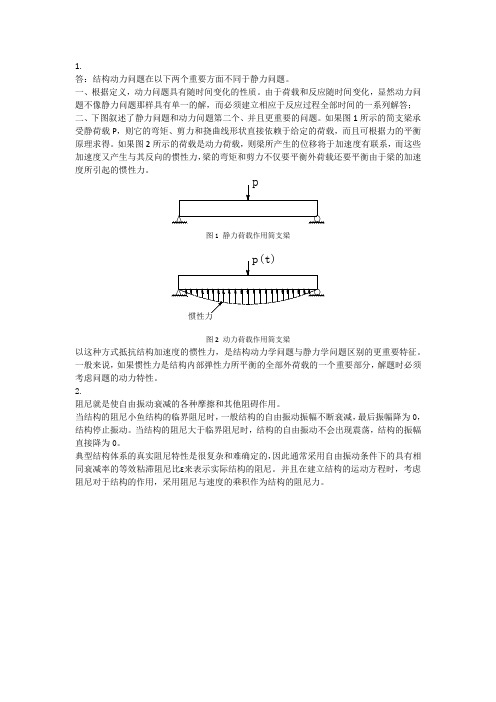
《结构动力学》考试复习题一、(概念题)(1) (填空题)某等效单自由度振动系统具有下列参数:17.5m kg =,70/k N cm =,阻尼比0.2ξ=,则系统的固有频率ω为 rad/s ,等效阻尼系数c 为 N. s/m 。
(2) (填空题)某振动系统具有下列参数:17.5m kg =,70/k N cm =,0.7/c N s cm =⋅,则系统的固有频率ω为 ,阻尼比ξ为 ,对数衰减率n 为 。
(3) (简单计算题)一弹簧悬挂某质量块,弹簧产生了静变形mm 4=∆st ,试确定系统作自由振动的固有频率 (重力加速度取2s m /10=g )。
(10分)(4) (填空题)当系统受简谐力作用发生共振时,系统所受的外力是由 来平衡。
(5) (问答题)某单自由度系统具有非线性的弹簧,其运动方程为:()()mx cx f x F t ++=,能否用杜哈美积分计算该系统的受迫振动响应?并说明理由。
(6) (填空题)同种材料的弦承受相同的张力,如果长度增加到原来的4倍,截面积减小到原来的4倍,则作该弦横向振动的各阶固有频率将 。
(7) (填空题)图示两个系统,已知各质点的质量 i m ,刚架的质量不计,忽略杆的轴向变形,试分别确定两系统的动力自由度: (1) n = ; (2) n = 。
(8) (作图题) 0.1ξ=时单自由度系统受迫振动的相频曲线如图所示,其中ω为系统的固有频率,p 为激振力的频率,ϕ为位移响应滞后于激振力的相位角。
试大致绘出0.05ξ=和0.2ξ=时相频曲线的形状。
(9) (问答题)模态分析法能否求解多自由度系统的弹塑性地震响应?并说明理由。
(10) (选择题) 对于一个单自由度系统而言,其临界阻尼与系统的固有特性参数 ,与系统所受的阻尼力 。
(a) 有关,有关;(b) 无关,无关;(c) 有关,无关;(d) 无关,有关2ωpππ二、(计算题)(1) 图示两个系统,已知EI 和M ,弹簧刚度316k EI l =,不计梁的质量,试确定:(1) 简支梁的等效刚度L k ;(2)两个系统的等效刚度a k 和b k ;(3) 两个系统的固有频率a ω和b ω。
结构动力学例题复习题
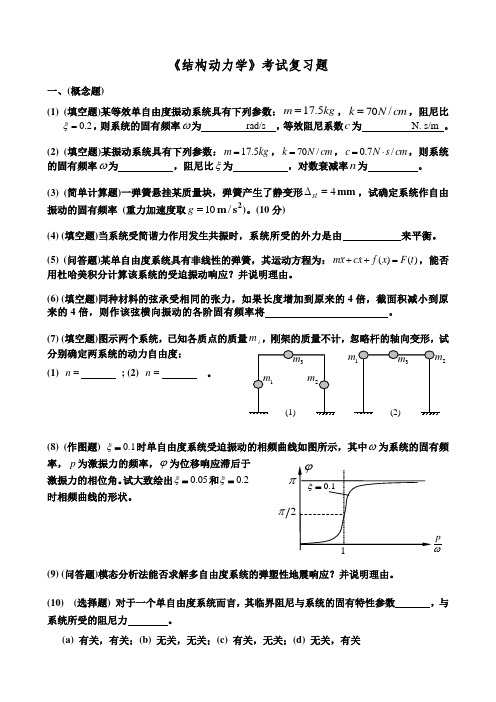
第十六章结构动力学【例16-1】不计杆件分布质量和轴向变形,确定图16-6 所示刚架的动力自由度。
图16-6【解】各刚架的自由度确定如图中所示。
这里要注意以下两点:1.在确定刚架的自由度时,引用受弯直杆上任意两点之间的距离保持不变的假定。
根据这个假定并加入最少数量的链杆以限制刚架上所有质量的位置,则刚架的自由度数目即等于所加链杆数目。
2.集中质量的质点数并不一定等于体系的自由度数,而根据自由度的定义及问题的具体情形确定。
【例16-2】 试用柔度法建立图16-7a 所示单自由度体系,受均布动荷载)t (q 作用的运动方程。
【解】本题特点是,动荷载不是作用在质量上的集中荷载。
对于非质量处的集中动荷载的情况,在建立运动方程时,一般采用柔度法较为方便。
设图a 质量任一时刻沿自由度方向的位移为y (向下为正)。
把惯性力I 、阻尼力R 及动荷载)(t P ,均看作是一个静荷载,则在其作用下体系在质量处的位移y ,由叠加原理(见图b 、c 、d 及e ),则)(R I y P D I P +δ+∆=∆+∆+∆=式中,)t (q EI38454P =∆,EI 483 =δ。
将它们代入上式,并注意到ym I -=,y c R -=,得)(48)(384534y c y m EIt q EI y --+=图16-7经整理后可得)(t P ky y c y m E =++式中,3EI 481k =δ=,)(85)(t q k t P P E =∆= )(t P E 称为等效动荷载或等效干扰力。
其含义为:)(t P E 直接作用于质量上所产生的位移和实际动荷载引起的位移相等。
图a 的相当体系如图f 所示。
【例16-3】 图16-8a 为刚性外伸梁,C 处为弹性支座,其刚度系数为k ,梁端点A 、D 处分别有m 和3m质量,端点D 处装有阻尼器c ,同时梁BD 段受有均布动荷载)t (q 作用,试建立刚性梁的运动方程。
【解】 因为梁是刚性的,这个体系仅有一个自由度,故它的动力响应可由一个运动方程来表达,方程可以用直接平衡法来建立。
结构动力学试题及答案

结构动力学试题及答案(本文按试题和答案格式进行编写)试题一:1. 请问什么是结构动力学?2. 简述结构动力学的研究对象和主要内容。
3. 结构动力学分析常用的方法有哪些?4. 结构动力学分析中常用的数学模型有哪些?5. 结构动力学的应用领域有哪些?答案一:1. 结构动力学是研究结构在外力作用下的动态响应及其稳定性的学科。
2. 结构动力学的研究对象是各种工程结构,主要内容包括结构的振动、冲击响应、瞬态响应和稳态响应等。
3. 结构动力学分析常用的方法有模态分析法、频率响应分析法、时程分析法等。
4. 结构动力学分析中常用的数学模型有单自由度体系、多自由度体系、连续体系等。
5. 结构动力学的应用领域广泛,包括建筑结构工程、桥梁工程、风力发电机组、地震工程等。
试题二:1. 结构动力学分析中,模态分析的基本原理是什么?2. 简述模态分析的步骤和计算方法。
3. 常用的模态分析软件有哪些?4. 请问什么是结构的固有频率和阻尼比?5. 结构的模态振型对结构动力响应有什么影响?答案二:1. 模态分析是基于结构的振动特性,通过求解结构的固有频率、模态振型和阻尼比等参数,来研究结构的动力响应。
2. 模态分析的步骤包括建立结构有限元模型、求解结构的固有频率和模态振型、计算结构的阻尼比等。
常用的计算方法有有限元法、拉普拉斯变换法等。
3. 常用的模态分析软件有ANSYS、ABAQUS、MSC.NASTRAN等。
4. 结构的固有频率是结构在无外力作用下自由振动的频率,阻尼比是结构振动过程中能量耗散的程度。
5. 结构的模态振型对结构动力响应有很大影响,不同的模态振型会导致不同的振动特性和反应。
试题三:1. 结构动力学分析中,频率响应分析的基本原理是什么?2. 简述频率响应分析的步骤和计算方法。
3. 频率响应分析和模态分析有什么区别?4. 结构的频率响应函数和传递函数有什么区别?5. 频率响应分析在结构设计中的应用有哪些?答案三:1. 频率响应分析是研究结构在单频激励下的响应特性,通过求解结构的频率响应函数,来获得结构的响应。
(完整word版)年结构动力学试卷及答案,推荐文档
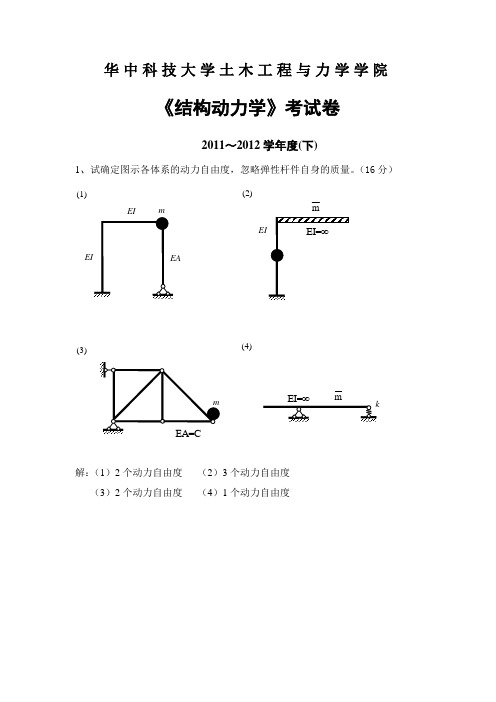
华中科技大学土木工程与力学学院《结构动力学》考试卷2011~2012学年度(下)1、试确定图示各体系的动力自由度,忽略弹性杆件自身的质量。
(16分)解:(1)2个动力自由度 (2)3个动力自由度 (3)2个动力自由度 (4)1个动力自由度(1)(2)m(3)(4)m2、试求图示结构的自振频率ω(15分)解:图示结构为单自由度体系,以横梁转角ϕ为自由度。
由0A M =∑ 有: 22200lm x dx ml kl ϕϕϕ⋅⋅⋅⋅++=⎰化简得:()303klm m ϕϕ⋅⋅+=+∴自振频率ω=3、如图所示体系,各杆长为l ,EI=常数,1处有集中质量m ,2处受动力偶()M t =Msin tθ;θ(14分)解:结构体系的1M 、p M 如下图所示:tm m B3111122=2EI 233l l l l EIδ⎛⎫∴⨯⨯⨯⨯= ⎪⎝⎭21111sin sin 236MMl l l M t t EI EI θθ⎛⎫∆=⨯⨯⨯= ⎪⎝⎭ ∴体系微分方程为:()321112sin 36M t lMl y m y m y t EI EI δθ⋅⋅⋅⋅⎛⎫⎛⎫=-+∆=-⋅+⋅ ⎪ ⎪⎝⎭⎝⎭33sin 24EI My y t ml mlθ⋅⋅⇒+⋅=⋅ 2max23331133344622M M Ml y EI EI EI ml ml EIml ml ml θ∴=⋅=⋅=--- ∴惯性力幅值22max3362EI Ml MI m y m ml EI lθ==⋅⋅=M M MMMl1t θ4、图示(a )所示梁的跨中有一台电动机,实测得此梁自由振动时跨中点位移时程曲线如图所示(b ),周期T=0.06s ,若忽略梁的分布质量。
(20分)试求:(1)阻尼比ξ;(2)共振时的动力系数β;(3)共振时电动机每分钟的转数 n ;(4)若电动机转数为600r/min ,由于其离心力引起梁中点稳态的振幅为2mm ,求共振时的振幅A 。
结构动力学习题
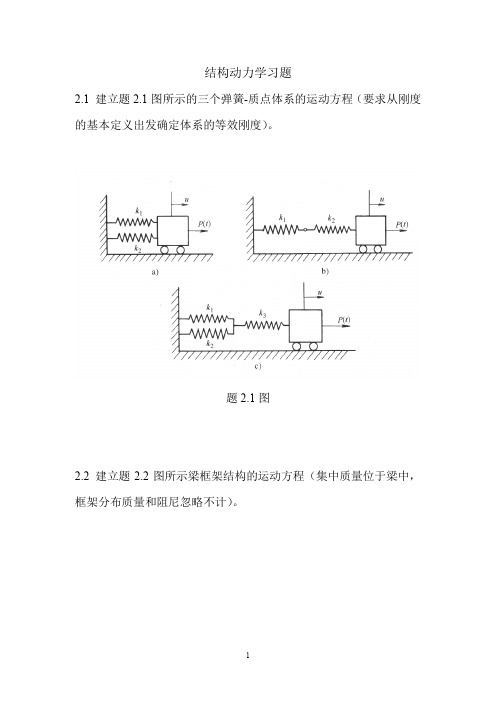
结构动力学习题2.1 建立题2.1图所示的三个弹簧-质点体系的运动方程(要求从刚度的基本定义出发确定体系的等效刚度)。
题2.1图2.2 建立题2.2图所示梁框架结构的运动方程(集中质量位于梁中,框架分布质量和阻尼忽略不计)。
题2.2图2.3 试建立题2.3图所示体系的运动方程,给出体系的广义质量M、广义刚度K、广义阻尼C和广义荷载P(t),其中位移坐标u(t)定义为无重刚杆左端点的竖向位移。
题2.3图2.4 一总质量为m1、长为L的均匀刚性直杆在重力作用下摆动。
一集中质量m2沿杆轴滑动并由一刚度为K2的无质量弹簧与摆轴相连,见题 2.4图。
设体系无摩擦,并考虑大摆角,用图中的广义坐标q1和q2建立体系的运动方程。
弹簧k2的自由长度为b。
题2.4图2.5 如题2.5图所示一质量为m1的质量块可水平运动,其右端与刚度为k的弹簧相连,左端与阻尼系数为c的阻尼器相连。
摆锤m2以长为L的无重刚杆与滑块以铰相连,摆锤只能在图示铅垂面内摆动。
建立以广义坐标u和θ表示的体系运动方程(坐标原点取静平衡位置)。
题2.5图2.6如题2.6图所示一质量为m1的质量块可水平运动,其上部与一无重刚杆相连,无重刚杆与刚度为k2的弹簧及阻尼系数为c2的阻尼器相连,m1右端与刚度为k1的弹簧相连,左端与阻尼系数为c1的阻尼器相连。
摆锤m2以长为L的无重刚杆与滑块以铰相连,摆锤只能在图示铅垂面内摆动。
建立以广义坐标u和θ表示的体系运动方程(坐标原点取静平衡位置,假定系统作微幅振动,sinθ=tanθ=θ)。
计算结果要求以刚度矩阵,质量矩阵,阻尼矩阵的形式给出。
3.1单自由度建筑物的重量为900kN,在位移为3.1cm时(t=0)突然释放,使建筑产生自由振动。
如果往复振动的最大位移为2.2cm(t =0.64s),试求:(1)建筑物的刚度k;(2)阻尼比ξ;(3)阻尼系数c。
3.2 单自由度体系的质量、刚度为m=875t,k=3500kN/m,且不考虑阻尼。
结构动力学复习题全解

*本章讨论结构在动力荷载作用下的反应。 **学习本章注重动力学的特征------惯性力。 *结构动力计算的目的在于确定结构在动力荷载作用下的位移、内力等量值随时间变化 的规律,从而找出其最大值作为设计的依据。 *动力学研究的问题:动态作用下结构或构件的强度、刚度及稳定性分析。 一、 本章重点 1.振动方程的建立 2.振动频率和振型的计算 3.振型分解法求解多自由度体系 4.最大动位移及最大动应力 二、 基础知识 1.高等数学 2.线性代数 3.结构力学 三、 动力荷载的特征 1.大小和方向是时间 t 的函数 例如:地震作用,波浪对船体的作用,风荷载,机械振动等 2.具有加速度,因而产生惯性力 四、 动力荷载的分类 1.周期性动力荷载 例如:①机械运转产生的动力荷载,②打桩时的锤击荷载。 P(t) P(t)
Δt 时间内,干扰力的作用近似的看作是初速度为 v (t ) = 的自由振动。 由(3)式可知:
p∆t p ( ∆t ) 2 ,初位移为 y(t ) = =0 m 2m
y(t ) = y 0 cosωt +
v0 p∆t sinωt sinωt = ω mω
---------------------(9)
& (t ) FD= - C y
,称为粘滞阻尼力,阻尼力 与运动方向相反。
一切引起振动衰减的因素均称为阻尼,包括 EI ①材料的内摩擦引起的机械能转化为热能消失 ②周围介质对结构的阻尼(如,空气的紫力) ③节点,构件与支座连接之间的摩擦阻力 ④通过基础散失的能量 2.弹性恢复力 FE= - K y(t) ,K 为侧移刚度系数,弹性恢复力 与运动方向相反。 3.惯性力
,阻尼系数为 C ,横梁具有分布质量 m =
m L
。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第十二章 矩阵位移法【例12-1】 图 a 所示 连 续 梁 ,EI=常数,只 考 虑 杆 件 的 弯 曲 变 形 。
分别用位移法和矩阵位移法计算。
图12-1解:(1)位移法解∙基本未知量和基本结构的确定 用位移法解的基本结构如图c 所示。
这里我们将结点1处的转角也作为基本未知数,这样本题仅一种基本单元,即两端固定梁。
∙位移法基本方程的建立⎪⎭⎪⎬⎫=+θ+θ+θ=+θ+θ+θ=+θ+θ+θ000333323213123232221211313212111P P P R K K K R K K K R K K K 将上式写成矩阵形式⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧+⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧θθθ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡000321321333231232221131211P P P R R R K K K K K K K K K∙系数项和自由项 计算(须绘出单位弯矩图和荷载弯矩图)由图d ,结点力矩平衡条件∑=0M ,得 EI K 411=,l EI K 221=,031=K由图e ,结点力矩平衡条件∑=0M ,得l EI K 212=,l EI l EI l EI K 84422=+=,l EI K 232=由图f ,结点力矩平衡条件∑=0M ,得 013=K ,l EI K 223=,l EI EI EI K 84433=+=由图g ,结点力矩平衡条件∑=0M ,得81Pl R p -=,2Pl R P -=,03=P R将系数项和自由项代入位移法基本方程,得⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧--+⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧θθθ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡0000118820282024321Pl l EI ∙解方程,得⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧-=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧θθθ14114162321EI Pl∙由叠加法绘弯矩图,如图h 所示。
(2)矩阵位移法解∙对单元和结点编号(图a ) 本题只考虑弯曲变形的影响,故连续梁每个结点只有一个角位移未知数。
若用后处理法原始结构刚度阵为44⨯阶;用先处理法结构刚度阵为33⨯阶(已知角位移04=θ)。
下面采用先处理法来说明矩阵位移法计算过程。
单元标准形式为(图b ))(e k⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=)()()()()(4224e jj e jie ije ii e k k k k l EI l EI l EI l EI∙求局部坐标系下的单元刚度矩阵)(e k∙求整体坐标下的单元刚度矩阵T k T k e T e )()(=,因连续梁的局部坐标和整体坐标是一致的,所以有)()(e e k k =,得(注:本题用先处理法换码))1(k 214224)1(⎥⎦⎤⎢⎣⎡=lEI , )2(k324224)2(⎥⎦⎤⎢⎣⎡=lEI,)3(k34224)3(⎥⎦⎤⎢⎣⎡=lEI∙按“对号入座”规则集成总刚,得=K 321820282024⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡l EI ∙形成荷载列阵P(1) 计算单元固端列阵=)1(F F 21181⎭⎬⎫⎩⎨⎧-Pl ,=)2(F F 324141⎭⎬⎫⎩⎨⎧-Pl ,=)3(FF 034141⎭⎬⎫⎩⎨⎧-Pl (2)将单元固端列阵反号,并按“对号入座”规则送入荷载列阵P (本题结点荷载为零)P =E D P P +=321081814141418181000⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧+-+-+⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧Pl Pl∙将结构刚度矩阵及荷载列阵代入矩阵位移法方程P K =∆,得⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧θθθ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡011820282024321Pl l EI∙解方程,得⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧-=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧θθθ14114162321EI Pl∙计算杆端弯矩)()()()()()()()()()(e e e F e e e F e e e F e T k F k F k F F ∆+=∆+=δ+=)1(F=⎭⎬⎫⎩⎨⎧=⎭⎬⎫⎩⎨⎧+⎭⎬⎫⎩⎨⎧-=⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡+⎭⎬⎫⎩⎨⎧-4502083852416525241641141642241812Pl Pl Pl EI Pl l EI Pl )2(F=⎭⎬⎫⎩⎨⎧-=⎭⎬⎫⎩⎨⎧+⎭⎬⎫⎩⎨⎧-=⎭⎬⎫⎩⎨⎧-⎥⎦⎤⎢⎣⎡+⎭⎬⎫⎩⎨⎧-54452084144161041044161441642241412Pl Pl Pl EI Pl l EI Pl )3(F=⎭⎬⎫⎩⎨⎧-=⎭⎬⎫⎩⎨⎧--+⎭⎬⎫⎩⎨⎧-=⎭⎬⎫⎩⎨⎧-⎥⎦⎤⎢⎣⎡+⎭⎬⎫⎩⎨⎧-51542082441610410441601416422441412Pl Pl Pl EI Pl l EI Pl 得各单元杆端弯矩后,再叠加上一相应简支弯矩图即得各单元弯矩图。
将各单元弯矩图组合在一起,得整个结构的弯矩图(图h )。
小结:通过本题的计算可看到:(1)基本未知量和基本结构。
位移法与矩阵位移法二者都是以结点位移为基本未知量,以单根杆件(单元)为计算对象。
位移法为方便计算,有三类杆件;而矩阵位移法只有一类杆件,即两端固定等截面梁。
(2)刚度矩阵与荷载列阵的形成。
位移法是用单位弯矩图和荷载弯矩图并由结点的平衡条件计算系数项和自由项的,而后形成刚度矩阵与荷载列阵的;而矩阵位移法是以单元杆端刚度元素、单元杆端荷载元素,按“对号入座”规则形成刚度矩阵与荷载列阵的。
矩阵位移法基本方程的建立,归结为两个问题:一是根据结构的几何和弹性性质建立整体刚度矩阵K ,二是根据受载情况形成整体荷载列阵P 。
(3)有(1)、(2)可知,二者的关系是:“原理同源,作法有别”。
因此矩阵位移法不是一个新方法,它是新的计算工具(电子计算机)与传统力学原理(位移法)相结合的产物。
【例12-2】试求图a 所示结构原始刚度矩阵中的子块 22K ,已知单元 ①的整体坐标的单元刚度矩阵如图c 所示。
图12-2解:本题每个结点有两个基本位知量(竖向线位移和角位移),如图b 所示。
单元刚度矩阵为44⨯阶(图c )。
由图d 所示子块形式,22K 的元素应为单元①的j 端元素(图c 右下角子块)与单元②i 端元素(图c 左上角子块乘以2)之和,即)2(22)1(22)2()1(22K K K K K ii jj +=+= ⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=60000360036002164000072007200144200003600360072【例12-3】只计弯曲变形时,用先处理法写出结构刚度矩阵K 。
(设 EI= 1)图12-3解:由图d 及先处理法结点位移编号图c 写出各单元刚度矩阵,并按“对号入座”规则集成整体刚度矩阵。
)1(k 210045.125.15.175.05.175.025.145.15.175.05.175.0⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------=, )2(k 30210.25.10.15.15.15.15.15.10.15.10.25.15.15.15.15.1⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------= )3(k 4030667.2333.1333.1333.1333.1889.0333.1889.0333.1333.1667.2333.1333.1889.0333.1889.0⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------=,K 4321667.2333.100333.1667.415.101605.1025.2⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡= 【例12-4】用先处理法写出图a 所示结构刚度矩阵K ,E=常数。
不计轴向变形影响。
图12-4解:本题虽然是刚架,但不计轴向变形影响,即每一个结点只有一个角位移未知量。
根据图b 所示结点位移编号,则整体刚度矩阵为33⨯阶。
由于每个单元杆端只有角位移未知量,故单元刚度矩阵为22⨯阶的连续梁单刚形式。
)1(k =214224⎥⎦⎤⎢⎣⎡l EI ,)2(k =208448⎥⎦⎤⎢⎣⎡l EI ,)3(k =328448⎥⎦⎤⎢⎣⎡l EI ,K =3218404202024⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡【例12-5】图示连续梁 ,不计轴向变形 ,EI =常数 ,已知结点位移∆T43812⎥⎦⎤⎢⎣⎡--=EI ql EI ql 。
试求单元②的杆端力列阵 。
图12-5解:根据图a 的约束条件和图b 的结点位移编号,已知给出的结点位移是:{}⎭⎬⎫⎩⎨⎧=⎭⎬⎫⎩⎨⎧∆∆=∆3221v θ 有03211=θ==θ=v v ,EI ql 1232-=θ,EI qlv 843-=。
单元②的杆端力列阵为)2(F ⎪⎪⎪⎭⎪⎪⎪⎬⎫⎪⎪⎪⎩⎪⎪⎪⎨⎧-=⎪⎪⎪⎭⎪⎪⎪⎬⎫⎪⎪⎪⎩⎪⎪⎪⎨⎧--⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡---=22432322323127 125 0 8120 4 6 12 2 6 4 6 12 6 21ql ql ql ql EI ql EI ql l EI l EI l EI l EI l EI l EI l EI l EI l EI l EI 称对【例12-6】用矩阵位移法求图a 所示桁架各杆内力。
单元①、②的截面面积为A ,单元③的截面面积为2A ,各杆E 相同。
图12-6解:桁架每个结点两个线位移未知量(图b )。
∙局部坐标系下的单元刚度矩阵为44⨯阶,即)(e k =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡---000001010000011l EA ,T =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡αα-αααα-ααcos sin 00sin cos 0000cos sin 00sin cos∙整体坐标系下的单元刚度矩阵为T k T k e T e )()(=由图b 可知,单元① 030=α,23sin =α,21cos =α。
单元② 045=α,22sin =α,22cos =α。
单元③ 090=α,1sin =α,0cos =α。
)1(k =210013133333131333338⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡--------l EA ,)2(k =21002222222222222222222212222222228⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡--------l EA )3(k =21160160000016016000008⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--l EA 。
∙整体刚度矩阵及荷载列阵K =⎥⎦⎤⎢⎣⎡47855.257006.057006.072855.0l EA ,P =⎭⎬⎫⎩⎨⎧0P∙矩阵位移法方程⎥⎦⎤⎢⎣⎡47855.257006.057006.072855.0l EA ⎭⎬⎫⎩⎨⎧11v u =⎭⎬⎫⎩⎨⎧0P ∙解方程,得⎭⎬⎫⎩⎨⎧-=⎭⎬⎫⎩⎨⎧38497.067381.111EA Pl v u ∙计算各杆轴力)1(F =)1()1(∆Tk =⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡--2321021230000232100123)1(k ⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧-38497.067381.100EA Pl =⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧-06285.006285.0P (拉) )2(F =)2()2(∆Tk =⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡--22220222200002222002222)2(k ⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧-38497.067381.100EA Pl =⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧-06442.006442.0P (拉))3(F =)3()3(∆Tk =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--0100100000010010)3(k ⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧-38497.067381.100EA Pl =⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧-07699.007699.0P (压)【例12-7】已知图示桁架的自由结点位移列阵∆ ,求杆12在局部坐标系中的杆端 力 。