盾构机自动导向系统的测量方法研究_潘明华
盾构测量自动导向系统
米度不仅提供了产品,还提供了全方 位的技术服务
中铁隧道股份有限公司
~ 30 ~
价格
VMT的增值服务
210万元人民币/套
米度增值服务
150万元人民币/套
中铁隧道股份有限公司
~ 31 ~
最终结论
结论一:技术、功能、硬件方面两套系统差别甚微; 结论二:售后服务,米度系统更有保障; 结论三:价格,米度系统比VMT系统便宜60万元人民币;
米度售后服务
免费服务:2年,之后收取合理的人工费用 服务响应:12小时内 服务范围:系统本身,其他隧道测量技术咨询 硬件备用:提供终身硬件免费备用服务 系统软件:终身免费升级
中铁隧道股份有限公司
~ 29 ~
增值服务
VMT的增值服务
无
米度增值服务
赠送’隧道精灵’盾构施工测量软件 免费的隧道测量技术咨询服务 免费数据处理计算复核服务
中铁隧道股份有限公司
~6~
供电系统
VMT供电系统 米度供电系统
220VAC供电 全站仪附近必须提供220VAC电源 全站仪周围布设有电力线缆 安装、日常使用需布设线缆,一是耗费 时间,二是线缆在现场容易被扯断。
大容量电池供电。 电池续航时间:3~5天 全站仪附近无须提供220VAC电源 全站仪周围不须布设线缆
输入的参数直观易懂
中铁隧道股份有限公司
~ 13 ~
系统功能
中线计算 – 比较结论
比较项目 输入 平面偏移 垂直偏移 适应设计情况 难度 VMT 元素法 独立输入 独立输入 适应全国地铁设计 简单 米度 元素法 独立输入 独立输入 适应全国地铁设计 简单
中铁隧道股份有限公司
~ 14 ~
盾构机自动导向系统的测量方法研究_潘明华

( 1) +
全站仪可以直接得到激光束在隧道三维坐标系 中
和坡度角 利用激光标靶内安装 的
倾角仪直接测量得到。 2 3 盾头切口中心在隧道三维坐标系中的坐标计算 将激光标靶 反射棱 镜设 为相对 坐标 系的 原点, 相 对坐标系三轴方向的定义如图 1 所示。 切口中 心在 相对 坐 标系 中的 坐标 为 ( A ,- C ,-B ) , 则它的齐次坐标可 表示为 ( A ,- C, -B , 1) 。切 口中心 在 隧道坐标系内的坐标可以看成是它在相对坐标系中 的 位置经过绕 y 轴 旋转 角度 , 绕 x 轴旋 转角 度 , 绕 z 轴旋转角度 , 平移变换移动量( a , b , c ) 。则切口中 心 h 为: h = ( h 1 + h 2 + h3 + h4 ) 4 设盾尾中心 在相对 坐标系中 的坐标 为( X , Y , Z ) ,
0 cos sin 0 cos sin cos 0 0
0 - sin cos 0 0 0 1 0
0 0 0 1 0 0 0 1
cos 0 - s in 0 1 0 0 a 0 1 0
0 1 0 0 0 0 0 0 1 0 1
sin 0 cos 0
0 0 0 1
0 0 0
量全反射 棱 镜的 距 离, 同 时 为角 度 测量 提 供了 光 源。 全反射棱镜随 盾构 机运动 而运 动, 可能 偏离出 全站 仪 的镜头中心。为 保证 全站仪 能自 动进行 持续 测量, 全 站仪必须具备 自动 锁定目 标功 能, 使全 站仪镜 头始 终 对准反射棱镜的中心。 ( 3) 内置于盾 构机 中的 PLC 测 量模块 盾构机铰接油缸的长度。 ( 4) 带有隧道 掘进软 件的 计算机 软 件是 激光 自 动导向系统的 核心, 它通过 计算机 从全 站仪和 激光 标 靶等设备接收测量数据, 并完成测量算法。 2 测量方法及算法 首先定义隧 道 三维 坐标 系 的三 轴方 向, z 轴 为 垂 直向上; x 轴指向 正 北, 是 方位 角 0 的方 向; y 轴 指 向 正东, 为方位角 90 的方向。原点由设计人员确定。 2 2 盾构机轴线方位角的测量 通过标靶与计算机接口可以得到激光束与标靶 平 面法线的夹角 。由于激光 标靶与 盾构机轴 线平行 安 装, 可视 为激 光束 与盾 构机 轴线 的夹 角。由于 激 光 束与水平面存 在夹角 要获得盾 构机轴线 与激光束夹角水平方向 的投影 , 如图 2 所示。
盾构机激光导向测量系统原理研究

盾构机激光导向测量系统原理研究盾构机激光导向测量系统原理研究摘要:以我公司在某工程使用的海瑞克S481盾构机为例,介绍该盾构机配套的激光导向测量系统的组成,探讨该激光导向系统的工作过程,从测绘学角度,研究该激光导向系统的工作原理。
关键字:盾构施工盾构机导向测量系统姿态中图分类号:V556文献标识码: A引言目前,盾构法已成为我国隧道施工的一种主要方法,包括地铁隧道,电缆隧道,大的输水隧洞,伴随着激光、计算机及自动控制等技术的发展成熟,激光导向测量系统得到成功运用和发展。
我国盾构施工技术自20世纪50、60年代引进以来,在许多领域有了进步和发展,但在激光导向系统方面,尤其是测绘学原理方面研究不深,在一定程度上影响了盾构施工对隧洞中心轴线控制,而且对我国自行研发也不利。
全面理解激光导向系统的测量原理,有助于工程技术人员在盾构施工中解决问题,保证隧道中心轴线和准确贯通。
1、盾构机激光导向系统组成及其作用激光导向系统是综合运用测绘技术、激光传感技术、计算机应用技术以及机械电子等技术指导盾构施工的独立运行体系,它主要由:(1)激光全站仪(激光发射和接收源、距离和角度量测设备)和黄盒子(信号传输和供电装置,共2个);(2)激光接收靶(内置光栅和横、竖向测斜仪)和小棱镜;(3)主控室的中继箱、工业电脑(包括安装的软件)、PLC;(4)油缸伸长量测量装置等。
海瑞克盾构机激光导向系统核心是VMT测量系统软件。
在整个盾构施工过程中,激光导线测量系统起着非常重要的作用,它比作盾构机的“眼睛”,如下图2-1盾构施工基本过程图所示,盾构机激光导向系统贯穿整个盾构施工过程:在测量系统工业电脑上动态显示盾构机轴线相对于隧道设计轴线的偏差,指导盾构司机根据显示盾构姿态,调整推进参数,使盾构机沿着隧道设计轴线掘进;获取各环掘进姿态,输入相应数据,自动科学计算管片封顶块拼装位置,指导管片拼装。
输入设计图纸给定的隧洞轴线设计元素,自动计算隧道的理论设计中心轴线;导向系统自带远程数据传输功能,和地面监控室电脑相连,对盾构机的掘进姿态和相关推进参数实施远程实时监控,并能储存每个时间段的数据,以利于以后的研究。
盾构自动导向系统的误差分析
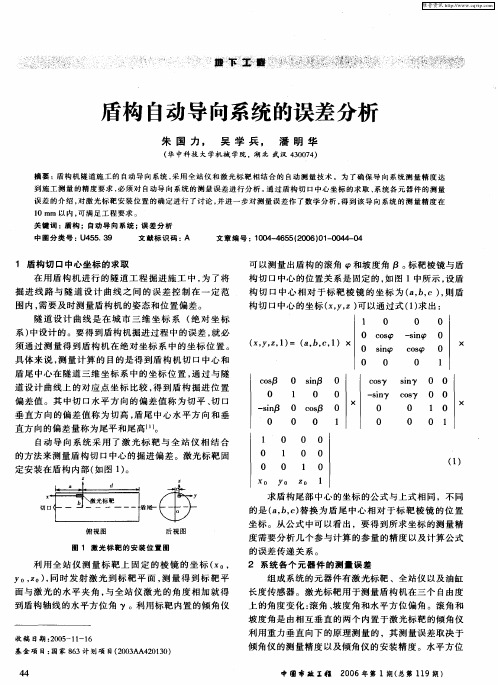
到施 工 测量 的精 度要 求 , 须对 自动导 向 系统 的测 量 误 差 进 行 分 析 。 过 盾 构 切 口中 心 坐 标 的 求 取 、 统 各 元 器 件 的 测 量 必 通 系
切
求 盾构 尾部 中心 的坐 标 的公 式与 上式 相 同 ,不 同 的是 ( , , ) t b c 替换 为盾 尾 中心 相对 于标 靶 棱 镜 的位 置 t 坐标 。从 公 式 中可 以看 出 ,要得 到所 求坐 标 的测 量精
俯 视 图
后 视 II 奎
度 需要 分析 几个 参 与计算 的参量 的精 度 以及计 算公 式
0
— -
COS
sn7 0 0 i cs o t 0 0 0 0 l 0 0 l
×
偏 差值 。其 中切 口水 平方 向的偏 差 值 称 为 切 平 、 口 切
垂 直方 向 的偏差 值 称 为 切高 , 尾 中心水 平 方 向和 垂 盾 直方 向的偏 差量 称 为尾平 和尾 高【1 l 。 自动 导 向系 统 采 用 了激 光 标 靶 与 全 站 仪 相 结 合 的方 法来 测 量盾 构切 口中心 的掘进 偏 差 。激 光标 靶 固 定 安装 在盾 构 内部 ( 图 1 。 如 )
中 图分 类 号 : 4 5 3 U 5 .9
文献标识码 : A
文章 编 号 :1 0 04
5 ( 0 6)1 0 5 20 0—
一种新的盾构自动引导方法

一种新的盾构自动引导方法摘要:提出两个棱镜加上倾斜仪的盾构自动引导系统模型,利用双轴倾斜仪读取俯仰角和扭转角,根据盾首盾尾以及两个棱镜的空间位置关系用空间解析几何方法推导了盾构姿态解算方法。
关键词盾构姿态坐标转换两点模型倾斜仪A new method of TBM automated guidance systemZhang Sha1 wangjinlei1Wang Zhi2,3(1 Zhejiang Dacheng Construction Group CO.,LTD., ZheJiang, 310012 )(2 Qingdao Surveying and Mapping Research Institute, Qindao, 266032)(3 Department of Surveying and Geomatics Engineering, Tongji University, Shanghai, 200092)Abstract:Two-prisms model with clinometers of TBM automated guidance system is proposed. Angles of pitch and rotation is measured using two-axis inclinometer. The author used the way of space analytic to deduce formula of TBM gesture based on the spatial relations and locations of the head and tail of TBM machine and the clinometers.Key words: TBM gesture; coordinate transform; two-points model; clinometers1 引言随着城市化进程的加快,城市人口大量增加,地面交通状况越来越差,国内许多城市都在积极兴建地铁来缓解地面交通压力,目前国内地铁施工中获取盾构机的实时姿态主要采用人工测量手段,耗时且费力,使用的自动引导系统均是从国外引进,如德国VMT公司的SLS系统及日本的小松系统等等[1],国内一些单位研究的自动引导系统基本都处于试验阶段,其普遍是三棱镜模型[2] [3],它基于空间直角坐标转换或是根据空间相应特征点距离不变的特性解算方程组来求取盾首盾尾的坐标。
盾构新型自动导向测量系统研究
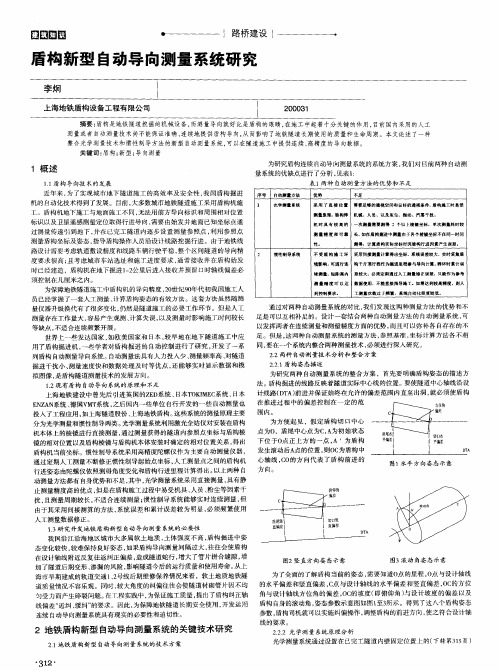
为保 障地 铁 隧道施 工 中盾 构机 的 导 向精度 , 2 0 世纪9 O 年 代初 我 国施 工 人
员 已经掌 握 了一 套人 工测 量 、 计 算盾 构 姿态 的有 效方 法 。这 套 方法 虽 然 随测
量仪 器 升级换 代 有 了很 多变 化 , 仍然 是 隧道 施工 的 必要 和不 足
序号 冉动涮量方法 优势 不 足
近年 来 , 为 了实现 城 市 地 下隧 道 施工 的高 效率 及 安全 性 , 我 国 盾构 掘 进 机的 自动 化技 术 得到 了发 展 。 目前 , 大 多数城 市 地铁 隧 道施 工采 用 盾构 机 施 工 。盾构 机地 下 施工 与地 面施 工 不 同 , 无法 用前 方导 向标识 和 周 围相对 位 置 标识 以 及卫 星遥 感测 量 定位 取得 行进 导 向 , 需要 由始发 井 地面 已 知坐标 点通
1 . 2 现 有盾 构 自动 导 向 系统 的 原理 和 不足
2 . 2两种 自动测 量技 术分析 和 整合 方案
2 . 2 1盾 构姿 态描 述
为 研究 两 种 自动 测 量 系统 的 整 合方 案 ,首 先 要 明确 盾 构姿 态 的 描述 方 法 。盾构 掘 进的 线路 反 映着 隧道 实 际 中心线 的位 置 。 要 使 隧道 中心 轴线 沿设
须 控制 在 几厘 米 之内 。
性.
涮得.计 算腐绚安酥坐标 时曝后构 行进因素产生 误差。
惯性制导蕉 坑
受 腊 梅 施 工王 f = 采用间接 测量计算褥 出 坐 标. 囊 绕误基投 犬. 实对采羹 盾
境影 响, 可进 行涟 掏千 斤 顶 行程作为掘进 壁程参 与导向计算 . 辞环时 曼 诗 误 续蠢量, 醺雕 寓内 差较 大, 必须 定期通过人 工 铡 曩捧 正 撰差 ,只 齄作 为参考 灏 量精 度 可 以选 教据使 用.不能直接指导 艟工.妞搿选到 较离精度,则人 到掩制要求 . 工涮 量次数过 r频繁.系统 内动化程度段 低.
盾构施工人工测量与自动测量的方法分析
盾构施工人工测量与自动测量的方法分析摘要:盾构施工中的掘进方向控制和高程控制直接决定了工程项目的质量、成本以及安全性,因此就需要在盾构施工中要采用可靠的技术测量这些关键的参数。
目前主要利用自动测量方法监控盾构机的实时姿态和掘进方向,同时利用人工方式加以检验,提高测量的可靠性。
研究以上两种测量路径的基本实现原理,并分析了其具体应用场景。
关键词:盾构施工;人工测量;自动测量;方法引言:在盾构施工中,自动测量方法可实时显示测量结果,实现全程监控,人工测量在效率上有所欠缺,通常只能在施工暂停的间隙开展人工测量,但这两种测量方式在盾构掘进控制中都是不可缺少的技术,二者要实现相互配合,全面提高盾构测量的可靠性和准确性,对这两种测量方式开展研究具有重要的工程指导意义。
1.测量在盾构施工中的重要性盾构机在地铁、高铁以及其他地下工程的施工中发挥着非常关键的作用。
以最常见的地铁施工为例,盾构机呈现出掘进效率高、安全风险可控、环境扰动小等一系列技术优势。
但地下掘进施工的关键是控制好方向,地铁线路要按照设计图纸经过多个站点,相邻站点之间尽可能保持直线,这样可减少路线整体长度、降低车站和线路的建造成本以及提高工程效率。
盾构机械在地下空间作业,方向测量是非常关键的一道工序,并且伴随着整个掘进过程。
一旦放线测量失误,整体的掘进线路就会发生偏移,盾构机械的瞬时位置是测量过程中的关键因素,测量的基本原理是在盾构机的特定位置设置专门的检测参考点,然后使用专业化的工具测量其位置变化,借此来实现盾构方向的全程控制[1]。
1.盾构施工测量方法分类(一)盾构施工人工测量方法第一,标尺测量。
这种测量工具可用于检测盾构机的管片是否存在偏差的问题。
在盾构机内部设置有专门的参考坐标,其位置位于盾尾内壳的铝合金尺上,利用水平标尺测量贴在其表面的三维坐标,获得数据之后,根据测量点与盾构机头部和尾部的距离关系,即可计算出其当前是否存在首尾方向上的偏差,这种方法在弯曲度较大的盾构作业中难以发挥作用,更加适用于直线段的测量,但整体精度偏低。
盾构自动导向系统的误差分析

’z =( ( cosT ’L) 2+( L sinT ’T) 2) 1/2
( 8)
式中: ’L 、’T 、’& 分别为 L、T、α的微量变化; δx、δy、δz 为
x, y, z 的微量变化。
隧道曲线设计中坡度角一般较小, 而且全站仪在
隧道内的安装高度与激光标靶在盾构内的安装高度大
体等高, 因此全站仪在测量过程中仰角变化幅度有限,
0 100
×
×
0
0 10
- sin" 0 cos" 0
0
0 01
0 001
10
-1
00
0 cos# - sin# 0
0 sin# cos# 0
( 2)
00
01
通过式( 2) 的计算, 可以精确得到标靶棱镜和切 口中心在盾构内的相对位置关系( a, b, c ) , 激光标靶 安装固定后, 相对关系就不会再改变。同样的方法可以 确定盾尾中心与标靶棱镜的相对位置关系( a′, b′, c′) 。
数, 相对分布系数定义为 6 倍均方差与误差分布宽度
之比, 即 k =6& /$max。按照概率法综合后的函数 y 的误
中国市政工程 2006 年第 1 期( 总第 119 期)
45
差带分布宽度 Δy max 为
n
2
$! " # Δymax
=
6"
/ky
=6 ky
i =1
#f $x i
$x i
n
2
$!% & = 1 ky
在工程测量中利用直接测量的参数和已知的函
数关系式计算出目标量, 称为间接测量法。因此, 在已
知参数误差的情况下, 讨论目标量的测量误差主要讨
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
施 工 技 术 CONSTRUCTION TECHNOLOGY
2005 年 6 月 第 34 卷 第 6 期
盾构机自动导向系统Biblioteka 测量方法研究潘明华, 朱国力
( 华中科技大学 , 湖北 武汉 430074)
[ 摘要 ] 介绍了 利用激光标靶、 全站仪和 PLC 构成盾构姿态测量系统获 得测量数据 的方法 , 利用这些 测量数据求 取 盾构机的坐标位置和角度的算法 , 通过与隧道设 计曲线的比较得到盾构机在水平方向和垂 直方向上 的位置和角 度 偏差值 , 使操作人员可以通过这些结果控制盾构 机的掘进操作。 [ 关键词 ] 隧道工程 ; 盾构 ; 自动导向系统 ; 位置测量 ; 姿态测量 [ 中图分类号 ] TU921 [ 文献标识码 ] A [ 文章编号 ] 1002 - 8498( 2005) 06 - 0034 - 03
图 3 盾构机前部和后部角度连接示意
设 h 为盾构前部和后部铰接面的圆心的距离。则
36
施工技术
第 34 卷
则: X = - D - h cos( Y = - C + h cos( Z = - B + h sin( 式中, 当 2) cos( 2) sin( 2) cos( 2) - L cos cos 2) + L cos sin 2) + L sin cos 向右 ( 4)
在利 用盾构机 进行的 隧道掘进 施工工 程中, 为 了 将掘进线路与隧道设计曲线之间的误差控制在一定 范 围内, 需要 及 时测 量 盾构 机 的位 置 和掘 进 的方 位 角。 隧道设计曲线是在城市三维坐标系( 绝 对坐标系) 中 设 计的, 要得到盾构机掘进过程中的误 差, 就必须通过 测 量计算得到盾构机在绝对坐标系中的坐标位置和方 位 角。具体来说, 就 是要 得到盾 构机切 口中 心以 及盾 尾 中心在隧道三维坐标系中的坐标位置以及盾构机轴 线 的方位角, 通过 与隧 道设计 曲线上 的对 应点坐 标以 及 对应点所在位 置的 曲线方 向相 比较, 得 到位置 偏差 值 ( 水平方向和垂 直方向 ) 以及 角度 偏差值 ( 水平 偏航 角 和坡度角) 。 盾构的姿态和位置测量方法可分为人工测量和 自 动测量 2 类。目 前 自动 导 向测 量 系统 主 要有 英 国 的 ZED、 德国的 VMT 和 日本 的 GYRO 等 系 统。前两 者 为 激光导向, 后 者为陀 螺仪 导向。激光 全站 仪系 统是 国 外目前应用比较广泛的一种自动导向系统。 在 863 计划项目 地铁盾构姿态 测量导 向系统 的 支持下, 华中科 技大 学与上 海隧道 工程 股份有 限公 司 合作, 共同开展 了盾 构自动 导向系 统的 理论研 究和 系 统开发工作。
2 1 隧道三维坐标系的确定
( 全 站仪 仰角 ) , 盾 构机 轴线 与
水平面也存在夹角 ( 盾构机的坡度角) ( 见图 2) 。
设置辅助平面 ABDC, 根 据各边角几何关系可得:
= arccos[ ( cos - sin sin ) ( cos cos ) ] 的水平方位角 , 则盾构机轴线的 水平方位角 。 盾构机滚角 =
Abstract : In this article, authors introduce data -getting methods of a shield attitude measure system composed of laser target, total station and PLC, and state calculation methods to get coordinates and angles of the shield machine with these measure data. Engineers can compare calculation results with the tunnel design curve in order to obtain deviat ion values of horizontal position, vertical position and angles of the shield machine, and can adopt these results to control tunneling operations of the shield machine. Key words: tunnel engineering; shield; automatic guiding system; position measure; attitude measure
0 cos sin 0 cos sin cos 0 0
0 - sin cos 0 0 0 1 0
0 0 0 1 0 0 0 1
cos 0 - s in 0 1 0 0 a 0 1 0
0 1 0 0 0 0 0 0 1 0 1
sin 0 cos 0
0 0 0 1
0 0 0
量全反射 棱 镜的 距 离, 同 时 为角 度 测量 提 供了 光 源。 全反射棱镜随 盾构 机运动 而运 动, 可能 偏离出 全站 仪 的镜头中心。为 保证 全站仪 能自 动进行 持续 测量, 全 站仪必须具备 自动 锁定目 标功 能, 使全 站仪镜 头始 终 对准反射棱镜的中心。 ( 3) 内置于盾 构机 中的 PLC 测 量模块 盾构机铰接油缸的长度。 ( 4) 带有隧道 掘进软 件的 计算机 软 件是 激光 自 动导向系统的 核心, 它通过 计算机 从全 站仪和 激光 标 靶等设备接收测量数据, 并完成测量算法。 2 测量方法及算法 首先定义隧 道 三维 坐标 系 的三 轴方 向, z 轴 为 垂 直向上; x 轴指向 正 北, 是 方位 角 0 的方 向; y 轴 指 向 正东, 为方位角 90 的方向。原点由设计人员确定。 2 2 盾构机轴线方位角的测量 通过标靶与计算机接口可以得到激光束与标靶 平 面法线的夹角 。由于激光 标靶与 盾构机轴 线平行 安 装, 可视 为激 光束 与盾 构机 轴线 的夹 角。由于 激 光 束与水平面存 在夹角 要获得盾 构机轴线 与激光束夹角水平方向 的投影 , 如图 2 所示。
求出盾尾中心的里程, 垂直和水平位 置偏差, 坡度角 和 水平方位角的偏差。 3 利用人工测量进行误差校验 在隧道推进 的过程 中, 必 须独立 于自 动测 量系 统 定期对盾构机 的姿 态和位 置进 行检查, 间隔时 间取 决 于隧道的具体情况。在有严重的光折 射效应的隧道 中 ( 这主要是由于空气 温度 差别 很大) , 每次 检查 之间 的 间隔时间应该比较短。在隧道测量时 必须始终考虑 测 量误差的问 题。这就 需要采 用人 工测量 进行 校验, 将 计算得到的盾 构机 姿态与 软件 计算结 果相比 较, 根 据 经验, 误差在 5~ 10mm 以内可 以认为自 动导 向系统 的 测量和计算是正确的。 在检测误差 超过界 限时, 需要对 导向 系统 进行 校 正。以下几大因 素是 检测误 差产 生的原 因: 倾 角仪 误 ( 5) 差、 激光靶内置旋转光栅角度误差、 激 光靶安装尺寸 测 量、 全站仪 测 量距 离 值误 差、 全站 仪 和后 视 点坐 标 误 差。人工测量方 法可 以精确 测量 出盾构 机的 滚角、 俯 仰角和水平摆 角, 同 时可以 重新 测量全 站仪和 后视 点 的精确坐标。导向系统中预留角度误 差修改界面对 传 感器测量得到 的角 度进行 修正, 同时修 正了全 站仪 和 后视点的坐标。这样就可以将前面施 工过程中累计 的 测量误差抵消, 从而保证盾构机向正确的方向掘进。 4 结语 与目前国内盾构掘进施工中所采用的人工测量 法 相比较, 自动导向系统在算法上更 为精确, 而且对 带 有铰接油缸的盾构机盾尾中心的测量体现了算法的 优 越性。但是实际 施工 中的测 量结 果不仅 由算 法决 定,
1
测量系统的组成 测量系统要 实现对 盾构 机的位 置和 角度 测量, 需
要在盾构机上建立测 量目 标点 ( 激 光标 靶) , 并 用全 站 仪测量目标 点的 距离。在具 有铰 接装置 的盾 构机 中, 要通过目标点 坐标 换算盾 尾中 心的坐 标, 就需 要知 道 盾首与盾尾的 轴线 角度变 化, 因 此需要 知道铰 接油 缸 的长度。所以测量系统主要有以下 4 部分组成: ( 1) 激光标靶 激光标靶是严密 封装的精密 仪器。 在标靶下部安 装全 反射棱 镜, 以 便全站 仪测量 激光 标 靶的位置和 自动 锁定激 光标靶。 标靶正 面是 感光 面, 接收全站仪发 出的 激光束, 通过 标靶内 部传感 器测 量 得到激光束对标靶表面法线的夹角。 标靶内部在横 向 和纵向分别安 装一 部倾角 仪, 用 来测量 盾构机 的滚 角 和坡度角。激光 标靶 固定在 盾构 机的机 身内, 在安 装 时其位置就确 定了, 安装后 要精 确测量 标靶在 盾构 机 内的相对位置( 见图 1) 。 ( 2) 具有自动 锁定目 标功 能的全 站仪 全 站仪 测
2005 No. 6
潘明华等 : 盾构机自动导向 系统的测量方法研究
35
在隧道三维坐标系中的 坐标( x , y , z ) 可以 通过坐标 的 旋转变换和平移变换, 用式( 2) 计算得到。 ( x , y , z , 1) = ( A , _C, _B , 1) 1
图 1 激光标靶安装位置示意
图 2 设置辅助点求 的值
- sin 0 0
( 2)
b c
用 于测 量
式( 2) 中, 水平 方位角 当盾头仰起时坡度角
的范 围是( 0 , 360 ) , 顺 时 顺时针方向为正;
针方向为角度增加方向; 盾构滚角 为正。
2 4 盾尾中心在隧道三维坐标系中的坐标计算 盾构机没有 安装铰 接油 缸时, 盾 尾中 心与 切口 中 心都位于盾构 机轴 线上, 则 盾尾 中心的 坐标计 算也 可 以用式( 2) 求得, 不同之处在于盾尾中 心在相对坐标 系 中的坐标为(-D ,- C ,-B ) 。 当隧道转弯 曲率较 大时, 需要采 用带 铰接 油缸 的 盾构机。铰接油 缸将 盾构机 的前 部和后 部连 接起 来。 由于铰接点可 以作 微小角 度的 变化, 铰 接油缸 受外 力 可以伸长缩短, 盾构机前部和后部的 轴线会出现 偏离。 要计算盾尾中心在以激光标靶为原点的盾构机相对 坐 标系中的位置 坐标, 就必须 知道 前后轴 线间的 角度 变 化。目前我国生产的带铰接油缸 的盾构机设置 4 处 铰 接点, 分别位于盾构正面的左下、 左 上、 右上和右 下方, 呈 45 分布。 铰接油缸的 长度可 以通 过位移 传感 器测 量得 到, 存储于盾构内置 PLC 的数据模块中。设盾构机铰接 平 面的左 下、 左上、 右 上 和 右下 方 的 油缸 长 分 别 为 h 1 、 h 2、 h 3、 h4 ; 4 个铰 接 点 构成 的 正 方 形边 长 为 E ( 见 图 3) 。则盾首轴 线和 盾尾 轴线 的垂 直方向 夹角 , 水 平 方向夹角 可以用式( 3) 计算: = 2arcsin[ ( h 1 - h2 ) ( 2E ) ] = 2arcsin[ ( h2 - h 3 ) ( 2E ) ] ( 3)