有趣的MATLAB动画演示程序汇总[学长帮帮忙]
matlab动态爱心代码
Matlab动态爱心代码简介动态爱心代码是一种使用Matlab编程语言实现的动画效果,能够在屏幕上以爱心形状展示出美丽的动态效果。
本文将详细介绍Matlab动态爱心代码的实现原理和步骤。
实现原理Matlab动态爱心代码的实现原理基于数学方程。
通过使用心形曲线的参数方程,我们可以在Matlab中绘制出具有爱心形状的曲线。
然后,我们利用Matlab的动画功能,将这个曲线进行平移、旋转和缩放等变换,从而实现动态效果。
实现步骤以下将详细介绍实现Matlab动态爱心代码的步骤:步骤一:绘制心形曲线1.创建一个新的Matlab脚本文件。
2.使用参数方程来定义心形曲线的x和y坐标:–x = 16 * sin(t)^3–y = 13 * cos(t) - 5 * cos(2t) - 2 cos(3t) - cos(4t)3.设置参数t的取值范围,通常选择0到2*pi之间的一段范围。
4.使用plot函数绘制心形曲线:plot(x, y)5.使用axis函数设置坐标轴的显示范围,使爱心曲线充满整个屏幕。
6.使用title函数设置图像的标题,如“动态爱心”。
步骤二:实现动画效果1.使用hold on命令,保持之前绘制的爱心曲线不被删除。
2.使用for循环来不断更新曲线的位置和大小,从而实现动态效果。
3.在循环中,分别使用平移、旋转和缩放等变换函数来更新爱心曲线的坐标。
4.为了使动画效果更加平滑,可以在每次循环之间添加适当的延时。
5.循环结束之后,使用hold off命令来释放资源。
示例代码下面是一个示例的Matlab动态爱心代码:% 步骤一:绘制心形曲线t = 0:0.01:2*pi;x = 16 * sin(t).^3;y = 13 * cos(t) - 5 * cos(2*t) - 2 * cos(3*t) - cos(4*t);plot(x, y);axis([-20 20 -20 20]);title('动态爱心');% 步骤二:实现动画效果hold on;for scale = 0.1:0.1:2% 平移tx = 5 * scale;ty = -3 * scale;x_new = x + tx;y_new = y + ty;% 旋转angle = scale * pi/4;x_new = x_new * cos(angle) - y_new * sin(angle);y_new = x_new * sin(angle) + y_new * cos(angle);% 缩放x_new = x_new * scale;y_new = y_new * scale;plot(x_new, y_new);pause(0.1);endhold off;结论通过以上步骤,我们可以实现一个简单但美丽的Matlab动态爱心代码,展示出令人惊叹的动画效果。
Matlab-制作动画

保存动画的示例1
• 三维动画
[x,y,z]=peaks(30); %peaks产生一个凹凸有致的曲面 surf(x,y,z) %用X和Y定义x-y坐标网格,Z定义网格上每一点的高度,来生成三维曲面 axis([-3 3 -3 3 -10 10]) m=moviein(15); for i=1:15 view(-37.5+24*(i-1),30) m(:,i)=getframe; end movie(m)
surf(sin(2*pi*j/20)*Z,Z) F(j) = getframe; end movie(F,20)
15
其它动画示例程序
clear;clc; [x,y]=meshgrid(-8:.1:8); for j=1:20 f=@(x,y)(sin(sqrt((11-j)*(x.^2+y.^2)))./sqrt((11-j)*(x.^2+y.^2)+eps)); z=f(x,y); surf(x,y,z);shading interp; M(j) = getframe; if j==1 [I,map]=rgb2ind(M(j).cdata,256); imwrite(I,map,'out.gif','DelayTime',.1) else imwrite(rgb2ind(M(j).cdata,map),map,'out.gif','WriteMode','append','DelayTime',.1) end end movie2avi(M,'out.avi')
• 一般格式:
for i=1:n figure(i) F(i)=getframe; end; movie2avi(F,'...filename.avi')
MATLAB图形及三维动画仿真设计
[X,Y]=meshgrid(x,y);
p=sqrt(4-X.^2/9-Y.^2/4);
subplot(3,2,1);mesh(p); %有网格 格子图,色调方向:有上
subplot(3,2,2);surf(p); %默认的方向:色调方向:有上到
subplot(3,2,3);surfc(p); %带等高线;色调方向:有上到下
axis([0 6 8 18])
z=f(x,y) — 根据x,y坐标找出z的高度 例:绘制z=x2+y2的三维网线图形
>>x=-5:5; y=x; >>[X,Y]=meshgrid(x,y); >>Z=X.^2+Y.^2 ; >>mesh(X,Y,Z)
(五)三维曲面图
■ surf —— 三维曲面绘图函数,与网格图看起来一样 与三维网线图的区别: 网线图:线条有颜色,内部是黑色的(无颜色) 曲面图:线条是黑色的,内部有颜色(把线条之间的空
■
■
■ fill3(x,y,z,"w"); ■ hold on; ■ plot3(x,y,z,"ro") ■ grid on ■ xlabel("x轴"),ylabel("y轴"),zlabel("z轴") ■ axis([0 10 0 10 0 10])
(四)三维网格图
所谓网格图,是指把相邻的数据点连接起来形成的网状曲 面。利用在X-Y平面的矩形网格点上的Z轴坐标值,Matlab 定义了一个网格曲面。三维网格图的形成原理为:在X-Y平 面上指定一个长方形区域,采用与坐标轴平行的直线将其分 格;计算矩形网格点上的函数值,即Z轴的值,得到三维空 间的数据点;将这些数据点分别用处于X-Z或者平行面内的 曲线和处于Y-Z或者平行面的曲面连接起来,即形成网格图。 网格图对于显示大型的数值矩阵很有用处。
Matlab动画演示教学
维普资讯
22 1
福
建 电
脑
20 0 8年第 6期
Ma a 画演 示教 学 t b动 l
张
【 摘
萸 .张敬华 z
(1 . 福建农林 大学 计算机 与信 息学院 福建 福州 3 0 0 . 50 2 2 福建农林大学 计算机与信息 学院 福 建 福州 30 0 2、 50 2 要】 :介 绍了 Ma a l fb的功能与特点 , 阐述 了Mal t b在 高等数 学教 学中的作 用. 以高等数 学教 学中遇到的 问题为 a 并
例 , 细讨 论 了 MA L B应 用 于 高 等数 学 的教 学模 式 。 详 TA
【 关键词】 :Ma a ; t b 高等数 学教 学; l 可视化
0 Ma a 、 n b的动 画功 能与 特 点 ; i m了 1 MAIAB是 Ma1 rs 司 开发 的新 一 代 的科 学 与 工 程 计 例 1 l , 1 t l k公 Wo 算 软件 。 已经 成 为全 球 应 用 最 广 泛 最 流行 的软 件 之 一 . a a 自 m tb l 在 课 本 中 . 于 关 产 生之 日起 就具 有 方便 的数 据 可 视 化 功能 . 以将 向量 和 距 阵 用 l —lX i Sl a r i
MATLAB动画演示效果
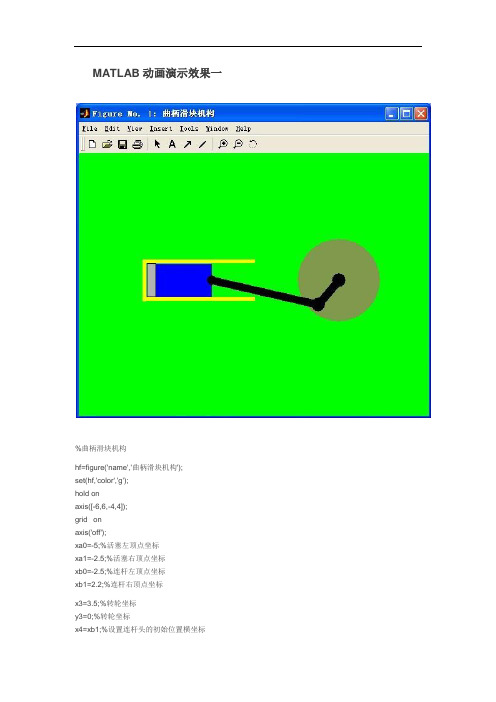
MATLAB动画演示效果一%曲柄滑块机构hf=figure('name','曲柄滑块机构');set(hf,'color','g');hold onaxis([-6,6,-4,4]);grid onaxis('off');xa0=-5;%活塞左顶点坐标xa1=-2.5;%活塞右顶点坐标xb0=-2.5;%连杆左顶点坐标xb1=2.2;%连杆右顶点坐标x3=3.5;%转轮坐标y3=0;%转轮坐标x4=xb1;%设置连杆头的初始位置横坐标y4=0;%设置连杆头的初始位置纵坐标x5=xa1;y5=0;x6=x3;%设置连轴初始横坐标y6=0;%设置连轴初始纵坐标a=0.7;b=0.7c=0.7a1=line([xa0;xa1],[0;0],'color','b','linestyle','-','linewidth',40); %设置活塞a3=line(x3,y3,'color',[0.5 0.6 0.3],'linestyle','.','markersize',300);%设置转轮a2=line([xb0;xb1],[0;0],'color','black','linewidth',10);%设置连杆a5=line(x5,y5,'color','black','linestyle','.','markersize',40);%设置连杆活塞连接头a4=line(x4,y4,'color','black','linestyle','.','markersize',50);%设置连杆连接头a6=line([xb1;x3],[0;0],'color','black','linestyle','-','linewidth',10);a7=line(x3,0,'color','black','linestyle','.','markersize',50);%设置运动中心a8=line([-5.1;-0.2],[0.7;0.7],'color','y','linestyle','-','linewidth',5);%设置汽缸壁a9=line([-5.1;-0.2],[-0.72;-0.72],'color','y','linestyle','-','linewidth',5);%设置汽缸壁a10=line([-5.1;-5.1],[-0.8;0.75],'color','y','linestyle','-','linewidth',5);%设置汽缸壁a11=fill([-5,-5,-5,-5],[0.61,0.61,-0.61,-0.61],[a,b,c]);%设置汽缸气体len1=4.8;%连杆长len2=2.5;%活塞长r=1.3;%运动半径dt=0.015*pi;t=0;while 1t=t+dt;if t>2*pit=0;endlena1=sqrt((len1)^2-(r*sin(t))^2);%连杆在运动过程中横轴上的有效长度rr1=r*cos(t);%半径在运动过程中横轴上的有效长度xaa1=x3-sqrt(len1^2-(sin(t)*r)^2)-(r*cos(t));%活塞在运动过程中的右顶点坐标位置xaa0=xaa1-2.5;%%活塞在运动过程中的左顶点坐标位置x55=x3-cos(t)*r;%连杆在运动过程中横坐标位置y55=y3-sin(t)*r;%连杆在运动过程中纵坐标位置set(a4,'xdata',x55,'ydata',y55);%设置连杆顶点运动set(a1,'xdata',[xaa1-2.5;xaa1],'ydata',[0;0]);%设置活塞运动set(a2,'xdata',[xaa1;x55],'ydata',[0;y55]);set(a5,'xdata',xaa1);%设置活塞与连杆连接头的运动set(a6,'xdata',[x55;x3],'ydata',[y55;0]);set(a11,'xdata',[-5,xaa0,xaa0,-5]);%设置气体的填充set(gcf,'doublebuffer','on');%消除震动drawnow;end文献出处:/blog/static/13485835420091124584320/MATLAB动画效果演示二MATLAB 2009-12-24 17:15:48 阅读135 评论0 字号:大中小订阅%理想弹簧阵子简谐运动%Clearrectangle('position',[12,8.5,2,0.3],'FaceColor',[0.5,0.3,0.4]);axis([0,15,-1,10]);%画顶板hold onplot([13,13],[7,8.5],'r','linewidth',2);%画直线y=2:.2:7;M=length(y);x=12+mod(1:M,2)*2;x(1)=13;x(end-3:end)=13;D=plot(x,y);%弹簧C=0:.1:2*pi;r=0.35;t1=r*sin(C);F1=fill(13+r*cos(C),2+t1,'r');% 球set(gca,'ytick',[0:2:9]);set(gca,'yticklabels',num2str([-1:3]'));plot([0,15],[3.3,3.3],'black');H1=plot([0,13],[3.3,3.3],'y');% 句柄[黄线]Q=plot(0,3.8,'color','r');% 运动曲线;td=[];yd=[];T=0;text(2,9,'理想中的弹簧振子简谐振动','fontsize',16);set(gcf,'doublebuffer','on');while T<12;pause(0.2);Dy=(3/2-1/2*sin(pi*T))*1/2;Y=-(y-2)*Dy+7;Yf=Y(end)+t1;td=[td,T];yd=[yd,Y(end)];set(D,'ydata',Y);set(F1,'ydata',Yf,'facecolor',rand(1,3));set(H1,'xdata',[T,13],'ydata',[Y(end),Y(end)]);set(Q,'xdata',td,'ydata',yd) ;T=T+0.1;end文献出处:/blog/static/1348583542009112451548632/%台球完全碰撞模拟示例axis([-1.6,12.6,-1.6,10.7])%确定坐标轴参数范围hold on %保持当前图形及轴系的所有特性fill([-2,13,13,-2],[-2,-2,11,11],[0,1,0]);%填充底座背景fill([-1,12,12,-1],[-1,-1,10,10],[0,0.5,0]);%填充底座背景ball1=line(0,5,'color','r','marker','.','erasemode','xor','markersize',60);%设置小球颜色,大小,线条的擦拭方式ball2=line(8,9,'color','g','marker','.','erasemode','xor','markersize',60);%设置小球颜色,大小,线条的擦拭方式ball3=line(-1,-1,'color','g','marker','.','erasemode','xor','markersize',80);%设置左下角圆的颜色,大小,线条的擦拭方式ball4=line(12,-1,'color','g','marker','.','erasemode','xor','markersize',80);%设置右下角圆的颜色,大小,线条的擦拭方式ball3=line(-1,10,'color','g','marker','.','erasemode','xor','markersize',80);%设置左上角圆的颜色,大小,线条的擦拭方式ball4=line(12,10,'color','g','marker','.','erasemode','xor','markersize',80);%设置右上角圆的颜色,大小,线条的擦拭方式title('完全非弹碰在模拟台球比赛的应用', 'color','r','fontsize',15);%图形标题pause(1)%设定暂停时间的长度t=0;dt=0.005;%设制初始数值while t<7.2%设定横轴范围t=t+dt;%设制横轴计算公式y=1/2*t+5;%设制纵轴计算公式set(ball1,'xdata',t,'ydata',y)%设制球的运动drawnow;%刷新屏幕end %结束while t<8.8%设定横轴范围t=t+dt;%设制横轴计算公式y=1/2*t+5;%设制纵轴计算公式set(ball2,'xdata',t,'ydata',y)%设制球的运动drawnow;%刷新屏幕end %结束while t<11.5%设定横轴范围t=t+dt;%设制横轴计算公式y=-1/2*t+14.3;%设制纵轴计算公式set(ball2,'xdata',t,'ydata',y)%设制球的运动drawnow;%刷新屏幕end%结束while t>-0.5%设制横轴范围t=t-dt;%设制横轴计算公式y=1/2*t+2.90;%设制纵轴计算公式set(ball2,'xdata',t,'ydata',y)%设制球的运动drawnow;%刷新屏幕end%结束while t<6%设制横轴范围t=t+dt;%设制横轴计算公式y=-1/2*t+2.40;%设制纵轴计算公式set(ball2,'xdata',t,'ydata',y)%设制球的运动drawnow;%刷新屏幕end%结束while t<11.5%设制横轴范围t=t+dt;%设制横轴计算公式y=1/2*t-3.0;%设制纵轴计算公式set(ball2,'xdata',t,'ydata',y)%设制球的运动drawnow;%刷新屏幕end%结束while t>-2%设制横轴范围t=t-dt;%设制横轴计算公式y=-t*7.65/12.9+9.57;%设制纵轴计算公式set(ball2,'xdata',t,'ydata',y)%设制球的运动drawnow;%刷新屏幕end%结束text(2,5,'好!进球了啊!!!恭喜!','fontsize',16,'color','r'); %显示字幕的颜色和大小文献出处:/blog/static/134858354200911245185379/MATLAB动画效果演示四MATLAB 2009-12-24 17:22:18 阅读50 评论2 字号:大中小订阅%能量守恒验证示例fill([6,7,7,6],[5,5,0,0],[0,0.5,0]);%右边竖条的填充hold on; %保持当前图形及轴系的所有特性fill([2,6,6,2],[3,3,0,0],[0,0.5,0]);%左边竖条的填充hold on;% 保持当前图形及轴系的所有特性t1=0:pi/60:pi;plot(4-2*sin(t1-pi/2),5-2*cos(t1-pi/2));%绘制中间的凹弧图形grid;%添加网格线axis([0,9,0,9]);%定义坐标轴的比例%axis('off');%关闭所有轴标注,标记,背景fill([1,2,2,1],[5,5,0,0],[0,0.5,0]);%中间长方形的填充hold on;% 保持当前图形及轴系的所有特性title('31608118');%定义图题x0=6;y0=5;head1=line(x0,y0,'color','r','linestyle','.','erasemode','xor','markersize',30);head2=line(x0,y0,'color','r','linestyle','.','erasemode','xor','markersize',50); %设置小球颜色,大小,线条的擦拭方式t=0;%设置小球的初始值dt=0.001;%设置运动周期t1=0;%设置大球的初始值dt1=0.001;while 1%条件表达式t=t+dt;x1=9-1*t;y1=5;x3=6;y3=5;if t>0x2=6;y2=5;%设置小球的运动轨迹endif t>2.8t=t+dt;a=sin(t-3);x1=6.1;y1=5.1;x3=4-2*sin(1.5*a);y3=5-2*cos(1.5*a);%设置大球的运动轨迹endset(head1,'xdata',x1,'ydata',y1);%设置球的运动set(head2,'xdata',x3,'ydata',y3);drawnow;end文献出处:/blog/static/1348583542009112452218157/。
MATLAB中的动画设计
1
质点动画
2
电影动画
3
擦除动画
MATLAB中的动画设计——质点动画
1、质点动画
• 产生一个顺着曲线轨迹运动的质点来操作 • 使用comet、comet3函数 • 最简单的动画产生方式
MATLAB中的动画设计——质点动画
设计步骤 • step1:求解出质点完整的运动轨迹坐标x,y和z • step2:使用comet或者comet3直接绘制动点
当创建了一系列动画帧后,可利用movie函数播放这些动画帧。该函数的主要格式有: (1)movie(M),将矩阵M中的动画帧播放一次 (2)movie(M,n),将矩阵M中的动画帧播放n次 (3)movie(M,n,fps),将矩阵M中的动画帧以每秒fps帧的速度播放n次
MATLAB中的动画设计——电影动画
• 最常用的动画设计方式。
Matlab的图形绘制函数允许采用不同的擦除模式来擦除原来的对象,不同的擦除模式 将产生不同的动画效果。擦除模式是通过没置“EraseMode”属性来完成的,一共有 三种擦除模式: (1)none:重新绘制图形对象时不擦除原来的对象,这种模式可动态演示图形的生 成过程,如曲线和旋转曲线的生成过程。 (2)background:在重新绘制图形对象之前。用背景色重绘对象来达到擦除原来图 形对象的目的。该模式会擦除任何对象和它下面的任何图形。 (3)Xor:在重新绘制图形对象之前,只擦除原来的对象,不会擦除其他对象或图形。 这种模式能产生图形对象移动的效果。
MATLAB中的动画设计——质点动画
【例3】平抛运动
%平抛运动 clear vx = 40; t = 0:0.01:10; x = vx*t; y = -9.8*t.^2/2; comet(x,y)
MATLAB入门之动画制作
MATLAB 程式設計入門篇:動畫製作
電影動畫之範例一
在下例中,我們將以不同的角度來顯示 peaks 函 數,並將其結果以電影的方式來呈現動畫。 範例6-1: movie01.m
clear M n = 50; peaks; fprintf('抓取畫面中...\n'); for i = 1:n view([-37.5+i*360/n, 30]); M(i) = getframe; end fprintf('播放電影中...\n'); movie(M, 3); % 播放電影三次 % 改變觀測角度 % 抓取畫面,並存入電影資料矩陣 M % 清除電影資料矩陣 M % 抓取 50 個畫面
MATLAB 程式設計入門篇:動畫製作
電影動畫之範例二
最後一個 frame 的畫面
MATLAB 程式設計入門篇:動畫製作
電影動畫之範例三
改變影像的色盤矩陣,讓影像出現「從正片變到 負片」的效果 範例6-3: movie03.m
clear M load clown.mat image(X); colormap(map); n = 30; scale = cos(linspace(0, 2*pi, n)); fprintf('抓取畫面中...\n'); for i = 1:n colormap(((i-1)*(1-map)+(n-i)*map)/n); M(i) = getframe; end fprintf('播放電影中...\n'); movie(M, -5); % 播放電影 5 次(含正向與逆向播放) % 改變色盤矩陣 % 畫出小丑臉 % 抓取 30 個畫面 % 清除電影資料矩陣 M
物件方式:
MATLAB_动画图、动态图制作
%录制电影动画 for j=1:n % %这里输入我们的绘图命令 % M(j) = getframe; end movie(M) %单帧显示方法 f = getframe(gcf); colormap(f.colormap); image(f.cdata);
1.1.1 电影动画演示实例(一)——千变万化的线条
2 动画的保存
3 有关动画制作的实验报告
4 更多动画实例
4.1 电影动画演示——旋转的山峰 4.2 擦除动画实例——卫星绕地球运动(注释很详细) 4.3 擦除动画实例——太阳|地球|月亮|卫星,绕转演示动画(注释很详细)
5 光学夫朗和费衍射现象模拟 MATLAB 源代码
6 牛顿环动画演示 MATLAB 源代码
该方法的经典格式是:
%擦除重绘模式动画 %选择一个擦除模式 set(h,'erasemode',erasemode)%h 是需要执行动画图像的句柄,一般都是由 line 或者 plot 创建 % %需要执行一些图形计算命令 % %循环语句中更新坐标数据,一般使用 for 或者 while for i=1:n
1.1.1 电影动画演示实例(一)——千变万化的线条 1.1.2 电影动画演示实例(二)——跳动的红心
1.2 擦除动画
1.2.1 Matlab 擦除重绘动画实例(一)——运动的小球 1.2.2 Matlab 擦除重绘动画实例(二)——单摆横梁 1.2.3 Matlab 擦除重绘动画实例(三)——时钟演示 1.2.4 Matlab 擦除重绘动画实例(四)——小球绕跑道运动
7 使用 MATLAB 绘制原子轨道和电子云图形
8 振动摆 MATLAB 动画源代码
MATLAB 基础应用版块
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MATLAB 动画演示程序汇总关注“超级数学建模”,做有料、有趣的数模人1.弹性蹦球演示程序figure(1);%定义函数axis([-5.1,5,-0.05,1.05]);%绘制二维图形hold on;%保持当前图形及轴系所有的特性axis('off');%覆盖坐标刻度,并填充背景%通过填充绘出台阶及两边的挡板fill([4.12,4.22,4.22,4.12],[-0.05,-0.05,1.05,1.05],'y');fill([-5,-3.2,-3.2,-5],[-0.05,-0.05,0,0],'g');fill([-3.2,-2.8,-2.8,-3.2],[-0.05,-0.05,0.2,0.2],'g');fill([-3.2,-1.4,-1.4,-3.2],[0.2,0.2,0.25,0.25],'g');fill([-1.4,-1,-1,-1.4],[0.2,0.2,0.45,0.45],'g');fill([-1.4,0.4,0.4,-1.4],[0.45,0.45,0.5,0.5],'g');fill([0.4,0.8,0.8,0.4],[0.45,0.45,0.7,0.7],'g');fill([0.4,2.0,2.0,0.4],[0.7,0.7,0.75,0.75],'g');fill([2.0,2.3,2.3,2.0],[-0.05,-0.05,0.75,0.75],'g');fill([2.3,4.12,4.12,2.3],[-0.05,-0.05,0,0],'g');%x2=line([-5,5],[0.25,0.25],'color','g','linestyle','-','markersize',50)%设置台阶边框线,颜色,擦试方式%line([-5,5],[0.5,0.5],'color','b','linestyle','-', 'markersize',50)%设置球与地面接触面的颜色,擦试方式%line([-5,5],[0.75,0.75],'color','b','linestyle','-','markersize',50)%设置球与地面接触面的颜色,擦试方式head=line(-5,1,'color','r','linestyle','.','erasemode','xor','markersize',60);%设置小球颜色,大小,线条和擦试方式%body=line(-5,1,'color','b','linestyle','-','erasemode','none'); %描绘轨迹线%设置初始条件while 1t=4;dt=0.001;w=0;dw=0.001;w=0;%设置球弹起的初始位置%设置球弹起的高度while t<=4.12t=dt+t;if w<=1w=dw+w;w=-1;endy=(-w*w)+1;set(head,'xdata',t,'ydata',y);%设置球的运动%set(body,'xdata',t,'ydata',y);%描绘轨迹线drawnow;end %结束程序w=0;%设置球弹起的初始位置%设置球弹起的高度while t>=2.11t=t-dt;if w<=1w=dw+w;elsew=-1;endy=(-w*w)+1;set(head,'xdata',t,'ydata',y);%设置球的运动%set(body,'xdata',t,'ydata',y);%描绘轨迹线drawnow;end %结束程序w=0;%设置球弹起的初始位置%设置球弹起的高度while t>=1.11t=t-dt;if w<=1w=dw+w;elsew=-1;endy=(-w*w)/4+1;set(head,'xdata',t,'ydata',y);%设置球的运动%set(body,'xdata',t,'ydata',y);%描绘轨迹线drawnow;end %结束程序w=-0.71;%设置球弹起的初始位置%设置球弹起的高度while t>=-0.62t=t-dt;if w<=1w=dw+w;elsew=-1;y=(-w*w)/2+1;set(head,'xdata',t,'ydata',y);%设置球的运动%set(body,'xdata',t,'ydata',y);%描绘轨迹线drawnow;end %结束程序w=-0.71;%设置球弹起的初始位置%设置球弹起的高度while t>=-2.31t=t-dt;if w<=1w=dw+w;elsew=-1;endy=(-w*w)/2+0.75;set(head,'xdata',t,'ydata',y);%设置球的运动%set(body,'xdata',t,'ydata',y);%描绘轨迹线drawnow;end %结束程序w=-0.71;%设置球弹起的初始位置%设置球弹起的高度while t>=-4t=t-dt;if w<=1w=dw+w;elsew=-1;endy=(-w*w)/2+0.5;set(head,'xdata',t,'ydata',y);%设置球的运动%set(body,'xdata',t,'ydata',y);%描绘轨迹线drawnow;end %结束程序for i=0:0.01:200%设置延时y=i+2;if(y>199)endendend2.嫦娥奔月演示程序figure('name','嫦娥一号与月亮、地球关系');%设置标题名字s1=[0:.01:2*pi];hold on;axis equal;%建立坐标系axis off % 除掉Axesr1=10;%月亮到地球的平均距离r2=3;%嫦娥一号到月亮的平均距离w1=1;%设置月亮公转角速度w2=12%设置嫦娥一号绕月亮公转角速度t=0;%初始时刻为0pausetime=.002;%设置暂停时间sita1=0;sita2=0;%设置开始它们都在水平线上set(gcf,'doublebuffer','on') %消除抖动plot(-20,18,'color','r','marker','.','markersize',40);text(-17,18,'地球');%对地球进行标识p1=plot(-20,16,'color','b','marker','.','markersize',20);text(-17,16,'月亮');%对月亮进行标识p1=plot(-20,14,'color','w','marker','.','markersize',13);text(-17,14,'嫦娥一号');%对嫦娥一号进行标识plot(0,0,'color','r','marker','.','markersize',60);%画地球plot(r1*cos(s1),r1*sin(s1));%画月亮公转轨道set(gca,'xlim',[-20 20],'ylim',[-20 20]);p1=plot(r1*cos(sita1),r1*sin(sita1),'color','b','marker','.','markers ize',30);%画月亮初始位置l1=plot(r1*cos(sita1)+r2*cos(s1),r1*sin(sita1)+r2*sin(s1));%画嫦娥一号绕月亮公转轨道p2x=r1*cos(sita1)+r2*cos(sita2);p2y=r1*sin(sita1)+r2*sin(sita2);p2=plot(p2x,p2y,'w','marker','.','markersize',20);%画嫦娥一号的初始位置orbit=line('xdata',p2x,'ydata',p2y,'color','r');%画嫦娥一号的运动轨迹while 1set(p1,'xdata',r1*cos(sita1),'ydata',r1*sin(sita1));%设置月亮的运动过程set(l1,'xdata',r1*cos(sita1)+r2*cos(s1),'ydata',r1*sin(sita1)+r2*sin(s1));%设置嫦娥一号绕月亮的公转轨道的运动过程ptempx=r1*cos(sita1)+r2*cos(sita2);ptempy=r1*sin(sita1)+r2*sin(sita2); set(p2,'xdata',ptempx,'ydata',ptempy);%设置嫦娥一号的运动过程p2x=[p2x ptempx];p2y=[p2y ptempy];set(orbit,'xdata',p2x,'ydata',p2y);%设置嫦娥一号运动轨迹的显示过程sita1=sita1+w1*pausetime;%月亮相对地球转过的角度sita2=sita2+w2*pausetime;%嫦娥一号相对月亮转过的角度pause(pausetime); %暂停一会drawnowend3.曲柄连杆机构充气球动画演示程序hf=figure('name','打气筒吹气球');set(hf,'color','g');axis([-10,10,-4,4]);hold onaxis off; %除掉坐标xa0=-2.5;%活塞左顶点坐标xa1=-1.8;%活塞右顶点坐标xb0=-2;%连杆左顶点坐标xb1=5;%连杆右顶点坐标x3=5.6;%转轮坐标y3=0;%转轮坐标x4=xb1;%设置连杆头的初始位置横坐标y4=0;%设置连杆头的初始位置纵坐标x5=xa1;y5=0;x6=x3;%设置连轴初始横坐标y6=0;%设置连轴初始纵坐标a=0.7;b=0.7c=0.7a1=line([xa0;xa1],[0;0],'color','m','linestyle','-','linewidth',20); %设置活塞a8=line([-2.7;2.3],[0.3;0.3],'color','b','linestyle','-','linewidth', 5);%设置打气筒a9=line([-2.6;2.3],[-0.3;-0.3],'color','b','linestyle','-','linewidth ',5);%设置打气筒a10=line([-2.6;-2.6],[-0.1;-0.37],'color','b','linestyle','-','linewi dth',5);%设置打气筒a11=line([2.0;2.0],[0.1;0.37],'color','b','linewidth',5);%设置打气筒a12=line([2.0;2.0],[-0.1;-0.37],'color','b','linewidth',5);%设置打气筒a13=line([-2.6;-2.6],[0.1;0.37],'color','b','linestyle','-','linewidt h',5);%设置打气筒a14=line([-2.7;-2.7],[0.1;-0.1],'color','b','linestyle','-','linewidt h',9);%设置气筒嘴a16=line([-3.2;-3.2],[0.1;-0.1],'color','r','linestyle','-','linewidt h',25);%设置气筒嘴a2=line([xb0;xb1],[0;0],'color','m','linewidth',5);%设置连杆a5=line(x5,y5,'color','black','linestyle','.','markersize',25);%设置连杆活塞连接头a4=line(x4,y4,'color','black','linestyle','.','markersize',25);%设置连杆连接头a6=line([xb1;x3],[0;0],'color','b','linestyle','-','linewidth',7);%设置连杆连接轴a7=line(x3,0,'color','m','linestyle','.','markersize',50);%设置运动中心a3=line(x3,y3,'color' ,[0.5 0.60.3],'linestyle','.','markersize',85);%设置手轮len1=6.8;%连杆长len2=0.7;%活塞长r=1.3;%运动半径dd=0.01;d=-4;plot(d,0,'color','r','marker','.','markersize',10);pausetime=.0001s=0;ds=1;t=0;dt=0.015*pi;while t<=15.68t=t+dt;drawnow;lena1=sqrt((len1)^2-(r*sin(2*t))^2);%连杆在运动过程中横轴上的有效长度rr1=r*cos(t);%半径在运动过程中横轴上的有效长度xaa1=x3-sqrt(len1^2-(sin(2*t)*r)^2)-(r*cos(2*t));%活塞在运动过程中的右顶点坐标位置xaa0=xaa1-2;%%活塞在运动过程中的左顶点坐标位置x55=x3-cos(2*t)*r;%连杆在运动过程中横坐标位置y55=y3-sin(2*t)*r*0.32;%连杆在运动过程中纵坐标位置set(a4,'xdata',x55,'ydata',y55);%设置连杆顶点运动set(a1,'xdata',[xaa1-0.2;xaa1],'ydata',[0;0]);%设置活塞运动set(a2,'xdata',[xaa1;x55],'ydata',[0;y55]);set(a5,'xdata',xaa1);%设置活塞与连杆连接头的运动set(a6,'xdata',[x55;x3],'ydata',[y55;0]);if (sign(y55-y3)>0)s=s+ds;d=d-dd;if s>200s=0;d=0;endset(gcf,'doublebuffer','on');%消除震动plot(d,0,'color','r','marker','.','markersize',s);%画气球set(gcf,'doublebuffer','on') %消除抖动pause(pausetime); %暂停一会drawnow;endendx=[-8.0 -7.0 -6.0 -5.5 -4.5 -3.5 -3.7 -3 -4 -5.5 -6.5 -7.5 -9.1 -7.3 ]; y=[-1.8 -1.2 -2.8 -1.5 -2.8 -0.5 -0.7 0.7 0.2 1.5 0.8 1.2 1.9 0.5]; fill(x,y,'r');text(-6,0,'pa','fontsize',22);4.打桩机动画演示程序clear; %清除工作区clc; %清除命令区figure('name','打桩机'); %设置标题axis ([0 ,10,0,10]); %建立坐标系hold on;axis off; %除掉坐标text(3,9.8,'打桩机','fontsize',20,'color','r');%画打桩机支架c1=line([1;5.5],[ 0.15;0.15],'color','k','linewidth',8);c2=line([1.7;5.2],[ 1.5;0.15],'color','k','linewidth',4);c3=line([1.8;5.2],[ 0.1;8],'color','k','linewidth',4);c4=line([1.7;5.2],[ 1.5;8],'color','k','linewidth',2);c5=line([1.2;1.8],[ 0.5;0.5],'color','k','linewidth',13);fill([4.9,5.3,5.3,4.9],[8.0,8.0,0.3,0.3],[1,0.1,0.5]);fill([4.4,4.6,5.6,5.8,5.6,4.6],[8.4,8.3,8.3,8.4,8.0,8.0],[1,0.1,0.5]) %画打桩机运动部分和水泥桩b1=line([8;8],[1;6],'color','b','linewidth',6);b2=line([5.5,5.5],[7.9,8],'color','k','linewidth',1);b3=line([5.3,5.55],[7.9,7.9],'color','k','linewidth',3);b4=line([5.5,5.5],[7.9,6.3],'color','k','linewidth',3);b5=line([5.5,5.5],[7,6.6],'color','k','linewidth',10);b6=line([5.5,5.5],[6.6,6.3],'color','k','linewidth',12);pausetime=1.6; %设置暂停时间pause(pausetime);%吊装水泥桩s=0;ds=0.01;pausetime1=.002;while s<2.5 %水泥桩向左移动s=s+ds;set(b1,'xdata',[8-s;8-s],'ydata',[1;6]);pause(pausetime1);endpausetime2=1;pause(pausetime2);s=0;ds=0.01;while s<1 %水泥桩向下移动s=s+ds;set(b1,'xdata',[5.5;5.5],'ydata',[1-s;6-s]);pause(pausetime1);endpause(pausetime2);s=0;ds=0.01;while s<1.3 %打桩机运动部分下移与水泥桩顶端相接触s=s+ds;set(b2,'xdata',[5.5;5.5],'ydata',[7.9-s,8]);set(b3,'xdata',[5.3;5.55],'ydata',[7.9-s,7.9-s]); set(b4,'xdata',[5.5;5.5],'ydata',[7.9-s,6.3-s]);set(b5,'xdata',[5.5;5.5],'ydata',[7-s,6.6-s]);set(b6,'xdata',[5.5;5.5],'ydata',[6.6-s,6.3-s]); pause(pausetime1);end%打桩机开始打桩pausetime3=.4;pause(pausetime2);s=0;ds=0.06; %设定打桩进度while s<4a=0;da=0.01;pausetime4=.0002;while a<.4 %两个子循环设置打桩机铁锺上下反复运动a=a+da;set(b5,'xdata',[5.5;5.5],'ydata',[5.7-s+a,5.3-s+a]); pause(pausetime4);enda=0;while a<.4a=a+da;set(b5,'xdata',[5.5;5.5],'ydata',[6.1-s-a,5.7-s-a]); pause(pausetime4);ends=s+ds;%打桩机运动部分与水泥桩同时向下移动set(b1,'xdata',[5.5;5.5],'ydata',[0;5-s]);set(b2,'xdata',[5.5;5.5],'ydata',[6.6-s,8]);set(b3,'xdata',[5.3;5.55],'ydata',[6.6-s,6.6-s]);set(b4,'xdata',[5.5;5.5],'ydata',[6.6-s,5-s]);set(b5,'xdata',[5.5;5.5],'ydata',[5.7-s,5.3-s]);set(b6,'xdata',[5.5;5.5],'ydata',[5.3-s,5-s]);pause(pausetime3);end5.电路演示程序figure('name','基本电路的模拟');axis([-3,12,0,10]);%建立坐标系hold on %保持当前图形的所有特性axis('off'); %关闭所有轴标注和控制%下面是画电池的过程fill([-1.5,-1.5,1.5,1.5],[1,5,5,1],[0.5,1,1]);%确定坐标轴范围并填充fill([-0.5,-0.5,0.5,0.5],[5,5.5,5.5,5],[0,0,0]); %确定坐标轴范围并填充text(-0.5,1.5,'负极');%在坐标上标注说明文字text(-0.5,3,'电池'); %在坐标上标注说明文字text(-0.5,4.5,'正极'); %在坐标上标注说明文字%下面是画导电线路的过程plot([0;0],[5.5;6.7],'color','r','linestyle','-','linewidth',4);%绘制二维图形线竖实心红色plot([0;4],[6.7;6.7],'color','r','linestyle','-','linewidth',4); %绘制二维图形线实心红色为导线a=line([4;5],[6.7;7.7],'color','b','linestyle','-','linewidth',4,'era semode','xor');%画开关蓝色plot([5.2;9.2],[6.7;6.7],'color','r','linestyle','-','linewidth',4);%绘制图导线为红色plot([9.2;9.2],[6.7;3.7],'color','r','linestyle','-','linewidth',4);% 绘制图导线竖线为红线plot([9.2;9.7],[3.7;3.7],'color','r','linestyle','-','linewidth',4); % 绘制图导线横线为红色plot([0;0],[1;0],'color','r','linestyle','-','linewidth',4);%如上画红色竖线plot([0;10],[0;0],'color','r','linestyle','-','linewidth',4);%如上画横线plot([10;10],[0;3],'color','r','linestyle','-','linewidth',4);%画竖线%下面是画灯泡的过程fill([9.8,10.2,9.7,10.3],[3,3,3.3,3.3],[0 0 0]);%确定填充范围plot([9.7,9.7],[3.3,4.3],'color','b','linestyle','-','linewidth',0.5) ;%绘制灯泡外形线为蓝色plot([10.3,10.3],[3.3,4.45],'color','b','linestyle','-','linewidth',0 .5); %绘制灯泡外形线为蓝色%以下为绘圆x=9.7:pi/50:10.3;%绘圆plot(x,4.3+0.1*sin(40*pi*(x-9.7)),'color','b','linestyle','-','linewi dth',0.5); %绘圆t=0:pi/60:2*pi; %绘圆plot(10+0.7*cos(t),4.3+0.6*sin(t),'color','b'); %绘圆%下面是箭头及注释的显示text(4.5,10,'电流运动方向'); %在坐标上标注说明文字line([4.5;6.6],[9.4;9.4],'color','r','linestyle','-','linewidth',4,'e rasemode','xor');%绘制箭头横线line(6.7,9.4,'color','b','linestyle','>','erasemode','xor','markersiz e',10);% %绘制箭头三角形pause(1);%下面是开关闭合的过程t=0;y=7.7;while y>6.7 %电路总循环控制开关动作条件x=4+sqrt(2)*cos(pi/4*(1-t));y=6.7+sqrt(2)*sin(pi/4*(1-t));set(a,'xdata',[4;x],'ydata',[6.7;y]);drawnow;t=t+0.1;end%下面是开关闭合后模拟大致电流流向的过程pause(1);light=line(10,4.3,'color','y','marker','.','markersize',40,'erasemode ','xor');%画灯丝发出的光:黄色%画电流的各部分h=line([1;1],[5.2;5.6],'color','r','linestyle','-','linewidth',4,'era semode','xor');g=line(1,5.7,'color','b','linestyle','^','erasemode','xor','markersiz e',10);%给循环初值t=0;m2=5.7;n=5.7;while n<6.3;%确定电流竖向循环范围m=1;n=0.05*t+5.7;set(h,'xdata',[m;m],'ydata',[n-0.5;n-0.1]);set(g,'xdata',m,'ydata',n);t=t+0.01;drawnow;endt=0;while t<2;%在转角处的停顿时间m=1.2-0.2*cos((pi/4)*t);n=6.3+0.2*sin((pi/4)*t);set(h,'xdata',[m-0.5;m-0.1],'ydata',[n;n]);set(g,'xdata',m,'ydata',n);t=t+0.05;drawnow;endt=0;while t<0.5 %在转角后的停顿时间t=t+0.5;g=line(1.2,6.5,'color','b','linestyle','^','markersize',10,'erasemode ','xor');%绘制第二个箭头g=line(1.2,6.5,'color','b','linestyle','>','markersize',10,'erasemode ','xor'); %绘制第二个箭头set(g,'xdata',1.2,'ydata',6.5);drawnow;endpause(0.5);t=0;while m<8 % 确定第二个箭头的循环范围m=1.1+0.05*t;n=6.5;set(g,'xdata',m+0.1,'ydata',6.5);set(h,'xdata',[m-0.4;m],'ydata',[6.5;6.5]);t=t+0.05;drawnow;endt=0;while t<2 %%在转角后的停顿时间m=8.1+0.2*cos(pi/2-pi/4*t);n=6.3+0.2*sin(pi/2-pi/4*t);set(g,'xdata',m,'ydata',n);set(h,'xdata',[m;m],'ydata',[n+0.1;n+0.5]);t=t+0.05;drawnow;endt=0;while t<0.5 %在转角后的停顿时间t=t+0.5;%绘制第三个箭头g=line(8.3,6.3,'color','b','linestyle','>','markersize',10,'erasemode ','xor');g=line(8.3,6.3,'color','b','linestyle','v','markersize',10,'erasemode ','xor');set(g,'xdata',8.3,'ydata',6.3);drawnow;endpause(0.5);t=0;while n>1 %确定箭头的运动范围m=8.3;n=6.3-0.05*t;set(g,'xdata',m,'ydata',n);set(h,'xdata',[m;m],'ydata',[n+0.1;n+0.5]);t=t+0.04;drawnow;endt=0;while t<2%箭头的起始时间m=8.1+0.2*cos(pi/4*t);n=1-0.2*sin(pi/4*t);set(g,'xdata',m,'ydata',n);set(h,'xdata',[m+0.1;m+0.5],'ydata',[n;n]);t=t+0.05;drawnow;endt=0;while t<0.5t=t+0.5;%绘制第四个箭头g=line(8.1,0.8,'color','b','linestyle','v','markersize',10,'erasemode ','xor');g=line(8.1,0.8,'color','b','linestyle','<','markersize',10,'erasemode ','xor');set(g,'xdata',8.1,'ydata',0.8);drawnow;endpause(0.5);t=0;while m>1.2 %箭头的运动范围m=8.1-0.05*t;n=0.8;set(g,'xdata',m,'ydata',n);set(h,'xdata',[m+0.1;m+0.5],'ydata',[n;n]);t=t+0.04;drawnow;endt=0;while t<2 %停顿时间m=1.2-0.2*sin(pi/4*t);n=1+0.2*cos(pi/4*t);set(g,'xdata',m,'ydata',n);set(h,'xdata',[m;m+0.5],'ydata',[n-0.1;n-0.5]);t=t+0.05;drawnow;endt=0;while t<0.5 %画第五个箭头t=t+0.5;g=line(1,1,'color','b','linestyle','<','markersize',10,'erasemode','x or');g=line(1,1,'color','b','linestyle','^','markersize',10,'erasemode','x or');set(g,'xdata',1,'ydata',1);drawnow;endt=0;while n<6.3 %循环范围m=1;n=1+0.05*t;set(g,'xdata',m,'ydata',n);set(h,'xdata',[m;m],'ydata',[n-0.5;n-0.1]);t=t+0.04;drawnow;end%下面是开关断开后的情况t=0;y=6.7;while y<7.7 %开关的断开x=4+sqrt(2)*cos(pi/4*t);y=6.7+sqrt(2)*sin(pi/4*t);set(a,'xdata',[4;x],'ydata',[6.7;y]);drawnow;t=t+0.1;endpause(0.5);%开关延时作用nolight=line(10,4.3,'color','y','marker','.','markersize',40,'erasemo de','xor');end6.电梯动画演示程序figure('name','自控电梯');axis([-2.0,15.0,-2.0,15.0])hold onfill([-2,15,15,-2],[-2,-2,15,15],[0.5,0.2,0.3]);x1=[8 8 10 10];y1=[6 0 0 6];x2=[10 10 12 12];text(-1,8,'上升','fontsize',10,'color','c');text(4,8,'下降','fontsize',10,'color','c');text(6,12.5,'控制电机','fontsize',10,'color','c');text(12.5,3,'电梯','fontsize',10,'color','c');text(5,4.5,'关闭','fontsize',10,'color','c');text(5,1.5,'打开','fontsize',10,'color','c');l1=line([2;5.5],[11;11],'color','c','linestyle','-','linewidth',2); l2=line([2;2],[9;11],'color','c','linestyle','-','linewidth',2);l3=line([1;1],[7;9],'color','c','linestyle','-','linewidth',2);l4=line([3;3],[7;9],'color','c','linestyle','-','linewidth',2);l5=line([1;3],[9;9],'color','c','linestyle','-','linewidth',2);%绘制导线k1=line([2;1],[6;7],'color','r','linestyle','-','linewidth',2);%单刀双掷开关k2=line([4;5],[3;4],'color','b','linestyle','-','linewidth',2);%单刀双掷开关g1=line([7.7;8],[3;3],'color','b','linestyle','-','linewidth',2);g2=line([7.7;7.7],[3;4],'color','b','linestyle','-','linewidth',2); g3=line([7.4;7.7],[2;4],'color','b','linestyle','-','linewidth',2); g4=line([7.4;7.4],[2;4],'color','b','linestyle','-','linewidth',2); g5=line([7.1;7.4],[2;4],'color','b','linestyle','-','linewidth',2); g6=line([7.1;7.1],[2;4],'color','b','linestyle','-','linewidth',2); g7=line([6.8;7.1],[2;4],'color','b','linestyle','-','linewidth',2); g8=line([6.8;6.8],[2;4],'color','b','linestyle','-','linewidth',2); g9=line([6.5;6.8],[2;4],'color','b','linestyle','-','linewidth',2); g10=line([6.5;6.5],[2;3],'color','b','linestyle','-','linewidth',2); g11=line([6.0;6.5],[3;3],'color','b','linestyle','-','linewidth',2); g12=line([6;6],[2;4],'color','c','linestyle','-','linewidth',2);g13=line([5;6],[2;2],'color','c','linestyle','-','linewidth',2);g14=line([5;6],[4;4],'color','c','linestyle','-','linewidth',2);%绘制电梯门伸缩控制开关door1=patch(x1,y1,[0 1 1]);door2=patch(x2,y1,[0 1 1]);%画电梯的两面门t=0:pi/100:2*pi;fill(6+0.5*sin(t),11+cos(t),[0.7,0.85,0.9]);%电机左端fill(8.5+0.5*sin(t),11+cos(t),[0.7,0.85,0.9]);%电机右端e0=line([9;10],[11;11],'color','r','linewidth',2);%e1=line([10;10],[6;11],'color','b','linewidth',2);%连接电机中轴和电梯的线%画电机的表面(用八根不同颜色的线代替,每根之间相差pi/4)%为简便起见,初始条件下可将八根线分成两组放在电机的顶端和底端s1=line([6;8.5],[12;12],'color','c','linestyle','-','linewidth',2); s2=line([6;8.5],[10;10],'color','m','linestyle','-','linewidth',2); s3=line([6;8.5],[12;12],'color','b','linestyle','-','linewidth',2); s4=line([6;8.5],[10;10],'color','w','linestyle','-','linewidth',2); s5=line([6;8.5],[12;12],'color','k','linestyle','-','linewidth',2); s6=line([6;8.5],[10;10],'color','g','linestyle','-','linewidth',2); s7=line([6;8.5],[12;12],'color','r','linestyle','-','linewidth',2); s8=line([6;8.5],[10;10],'color','b','linestyle','-','linewidth',2); a=0; %设定电机运转的初始角度da=0.05;%设定电机正转的条件s=0; %设定门运动的初始条件ds=0.05;%设定门运动的周期while s<5 %条件表达式 (当0<s<5时,电机正转,门上升)a=a+da;xa1=6+abs(0.5*sin(a)); %当线运动到电机背面时会覆盖电机左端,用abs可解决这一问题增强逼真感)xa2=8.5+0.5*sin(a);ya1=11+cos(a);ya2=11+cos(a);%设定s1的两端点坐标(s1是对应0的线)xb1=6+0.5*abs(sin(a+pi));xb2=8.5+0.5*sin(a+pi);yb1=11+cos(a+pi);yb2=11+cos(a+pi); %设定s2的两端点坐标(s2是对应pi的线)xc1=6+abs(0.5*sin(a+pi/2));xc2=8.5+0.5*sin(a+pi/2);yc1=11+cos(a+pi/2);yc2=11+cos(a+pi/2);%设定s3的两端点坐标(s3是对应pi/2的线)xd1=6+0.5*abs(sin(a-pi/2));xd2=8.5+0.5*sin(a-pi/2);yd1=11+cos(a-pi/2);yd2=11+cos(a-pi/2);%设定s4的两端点坐标(s4是对应-pi/2的线)xe1=6+abs(0.5*sin(a+pi/4));xe2=8.5+0.5*sin(a+pi/4);ye1=11+cos(a+pi/4);ye2=11+cos(a+pi/4);%设定s5的两端点坐标(s5是对应pi/4的线)xf1=6+0.5*abs(sin(a+pi*3/4));xf2=8.5+0.5*sin(a+pi*3/4);yf1=11+cos(a+pi*3/4);yf2=11+cos(a+pi*3/4);%设定s6的两端点坐标(s6是对应pi*3/4的线)xg1=6+abs(0.5*sin(a-pi*3/4));xg2=8.5+0.5*sin(a-3*pi/4);yg1=11+cos(a-3*pi/4);yg2=11+cos(a-3*pi/4);%设定s7的两端点坐标(s7是对应-3*pi/4的线)xh1=6+0.5*abs(sin(a-pi/4));xh2=8.5+0.5*sin(a-pi/4);yh1=11+cos(a-pi/4);yh2=11+cos(a-pi/4); %设定s8的两端点坐标(s8是对应-pi/4的线)set(s1,'xdata',[xa1;xa2],'ydata',[ya1;ya2]);set(s2,'xdata',[xb1;xb2],'ydata',[yb1;yb2]);set(s3,'xdata',[xc1;xc2],'ydata',[yc1;yc2]);set(s4,'xdata',[xd1;xd2],'ydata',[yd1;yd2]);set(s5,'xdata',[xe1;xe2],'ydata',[ye1;ye2]);set(s6,'xdata',[xf1;xf2],'ydata',[yf1;yf2]);set(s7,'xdata',[xg1;xg2],'ydata',[yg1;yg2]);set(s8,'xdata',[xh1;xh2],'ydata',[yh1;yh2]); %绘制电机表面各线条的运动s=s+ds;set(door1,'xdata',x1,'ydata',[6+0.5*s 0+0.5*s 0+0.5*s 6+0.5*s]);set(door2,'xdata',x2,'ydata',[6+0.5*s 0+0.5*s 0+0.5*s 6+0.5*s]); %绘制门的向上运动set(e1,'xdata',[10;10],'ydata',[6+0.5*s;11]); %绘制门顶的绳索的向上运动set(gcf,'doublebuffer','on');%消除振动drawnow;endb=0;%设定电机反转的条件db=0.05;while s<10 %条件表达式 (当5<s<10时,电机反转,门下降)b=b-db;xa1=6+abs(0.5*sin(a+b));xa2=8.5+0.5*sin(a+b);ya1=11+cos(a+b);ya2=11+cos(a+b);%设定s1的两端点坐标(s1是对应0的线)xb1=6+0.5*abs(sin(a+pi+b));xb2=8.5+0.5*sin(a+pi+b);yb1=11+cos(a+pi+b);yb2=11+cos(a+pi+b);%设定s2的两端点坐标(s2是对应pi的线)xc1=6+abs(0.5*sin(a+pi/2+b));xc2=8.5+0.5*sin(a+pi/2+b);yc1=11+cos(a+pi/2+b);yc2=11+cos(a+pi/2+b);%设定s3的两端点坐标(s3是对应pi/2的线)xd1=6+2*abs(sin(a-pi/2+b));xd2=8.5+0.5*sin(a-pi/2+b);yd1=11+cos(a-pi/2+b);yd2=11+cos(a-pi/2+b);%设定s4的两端点坐标(s4是对应-pi/2的线)xe1=6+abs(0.5*sin(a+pi/4+b));xe2=8.5+0.5*sin(a+pi/4+b);ye1=11+cos(a+pi/4+b);ye2=11+cos(a+pi/4+b);%设定s5的两端点坐标(s5是对应pi/4的线)xf1=6+0.5*abs(sin(a+pi*3/4+b));xf2=8.5+0.5*sin(a+pi*3/4+b);yf1=11+cos(a+pi*3/4+b);yf2=11+cos(a+pi*3/4+b);%设定s6的两端点坐标(s6是对应pi*3/4的线)xg1=6+abs(0.5*sin(a-pi*3/4+b));xg2=8.5+0.5*sin(a-3*pi/4+b);yg1=11+cos(a-3*pi/4+b);yg2=11+cos(a-3*pi/4+b);%设定s7的两端点坐标(s7是对应-3*pi/4的线)xh1=6+0.5*abs(sin(a-pi/4+b));xh2=8.5+0.5*sin(a-pi/4+b);yh1=11+cos(a-pi/4+b);yh2=11+cos(a-pi/4+b);%设定s8的两端点坐标(s8是对应-pi/4的线)%绘制电机表面各线条的运动set(s1,'xdata',[xa1;xa2],'ydata',[ya1;ya2]);set(s2,'xdata',[xb1;xb2],'ydata',[yb1;yb2]);set(s3,'xdata',[xc1;xc2],'ydata',[yc1;yc2]);set(s4,'xdata',[xd1;xd2],'ydata',[yd1;yd2]);set(s5,'xdata',[xe1;xe2],'ydata',[ye1;ye2]);set(s6,'xdata',[xf1;xf2],'ydata',[yf1;yf2]);set(s7,'xdata',[xg1;xg2],'ydata',[yg1;yg2]);set(s8,'xdata',[xh1;xh2],'ydata',[yh1;yh2]);s=s+ds;set(k1,'xdata',[2;3],'ydata',[6;7]); %绘制闸刀的换向运动set(door1,'xdata',x1,'ydata',[11-0.5*s 5-0.5*s 5-0.5*s 11-0.5*s]); set(door2,'xdata',x2,'ydata',[11-0.5*s 5-0.5*s 5-0.5*s 11-0.5*s]);%绘制门的向下运动set(e1,'xdata',[10;10],'ydata',[11-0.5*s;11]); %绘制门顶绳索的向下运动set(gcf,'doublebuffer','on');%消除振动drawnow;endfor i=1:400a1=10-0.005*i;a2=10+0.005*i;x1=[8 8 a1 a1];x2=[a2 a2 12 12];set(door1,'xdata',x1);set(door2,'xdata',x2);set(k2,'xdata',[4;5],'ydata',[3;2]); %绘制闸刀的换向运动set(gcf,'doublebuffer','on');%消除振动drawnow;end %绘制电梯门的打开运动for i=1:400a3=8+0.005*i;a4=12-0.005*i;x1=[8 8 a3 a3];x2=[a4 a4 12 12];set(door1,'xdata',x1);set(door2,'xdata',x2);set(k2,'xdata',[4;5],'ydata',[3;4]); %绘制闸刀的换向运动set(gcf,'doublebuffer','on');%消除振动drawnow;end %绘制电梯门的关闭运动7.防汛检测系统动画演示程序for j=0:10axis([-1 1 -1 1]);%设置x,y的坐标范围axis('off');%覆盖坐标刻度x1=[0 0 0.8 0.8];y1=[-0.6 -0.8 -0.8 -0.6];%对水槽中的水进行初设置line([0;0],[0.2;-0.8],'color','k','linewidth',3);%水槽左壁的颜色和宽度line([0;0.8],[-0.8;-0.8],'color','k','linewidth',3);%水槽底部的颜色和宽度line([0.8;0.8],[-0.7;-0.8],'color','k','linewidth',3);%水槽右边出水口的下面的颜色和宽度line([0.8;0.8],[0.2;-0.6],'color','k','linewidth',3);%水槽右边出水口的上面的颜色和宽度line([0.8;0.85],[-0.7;-0.7],'color','k','linewidth',3);%出水口的下壁的颜色和宽度。