基于改进最小二乘算法的船舶操纵性参数辨识
船舶操纵响应模型参数辨识的发展趋势分析

对于 KT 操纵响应模型而言,最为关键问题是
对于舰船操纵性指数 KT 的辨识。每一艘舰船的吨
参数辨识存在的困难
1957 年由日本的野本谦作等首先提出了计算
操纵性指数 KT 的方法。最开始需要进行手工作图
进行计算,误差较大。随着计算机的发展,逐渐提
出了最小二乘法、回归预报法、神经网络法等[2~3]系
ship maneuvering development direction,the identification of maneuverability index is discussed.
Key Words
maneuverability index,parameter identification,development trend
统辨识方法。
系统辨识的优劣主要取决于优化函数的构建
和寻优算法的效率。在操纵性指数辨识方面,绝大
多数系统辨识还是基于最原始的一阶和二阶微分
方程,优化函数多是包含微分形式的二次型。在数
位不同,外形不同,操纵时的航行情况不同,都会对
据获取的过程中航向角的误差虽然不大,但是随着
舰船的操纵性带来影响。如何快速有效地辨识舰
部分学者收集了大量数据,基于回归分析对未
知船型进行操纵性指数的预报,无需试验就能获取
到船舶的操纵性指数,十分方便。日本学者野本谦
作在文献[5]中给出了 K′ T′ 预报图谱和 K—T 相关
础上分析了航速对于 KT 指数的影响,即 K 关于航
速呈线性正相关,T 关于航速呈线性逆关系。
近年来,岭回归技术的出现有效解决了最小二
年野本谦作等分析了 Z 形试验结果,首先提出了计
算操纵性指数 KT 的方法[1]。孙文强[6]基于“郑和”
相关_最小二乘两步法在辨识中的应用与改进
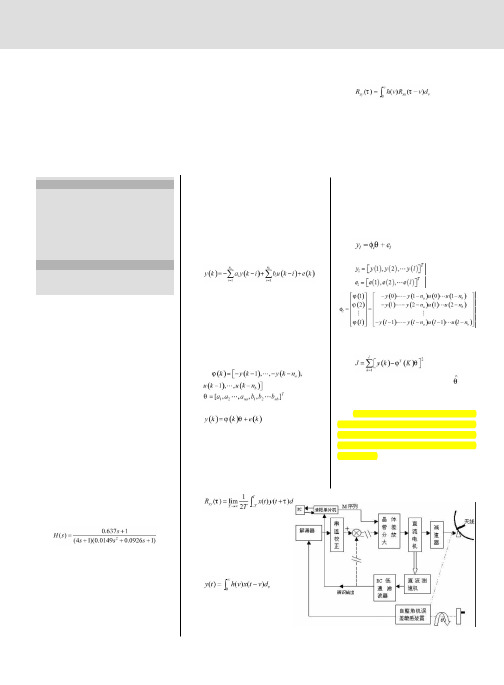
图 2 Figure.2 the comparison of R 梯 and R矩
(11)
这种形式便于计算机求解,是目前普 遍使用的求解方法。式中N △ t 要大于系统 的调整时间。同样,自相关函数 Rxx(τ) 和互相关函数 R xv(τ)都是用有限和来 近似计算积分的,引起的截断误差正比于 △ t 2。这样,在辨识中存在的误差源主要 有随机干扰,量化误差,有限和代替积分产 生的误差。其中人为误差只有有限和代替 积分产生的截断误差,结合仿真结果,我们 得出:截断误差仅仅影响到对传递函数零 点的估计,对极点估计没有影响。这样我们 可以快速,高精度地估计出系统传递函数
Байду номын сангаас
的极点,从而判定系统的稳定性。
6 互相关函数计算的梯形法改进
在前面提到,数字计算机中积分是化 为有限和近似计算的。由分析可以得知, 这种有限和计算实际上是积分的矩形近 似,引起的截断误差正比于△ t 2。我们可 以用梯形法作一改进,以减小截断误差。
将梯形近似公式
(12) 运用在互相关函数中,可得:
(2) 则(1 )式可以表示为:
(3) 所以只要能正确的利用输入、输出序 列估计出θ就能得到被辨识系统的传递函 数, 最小二乘法是一种估计θ值的方法。 3.2 辨识方法 3.2.1 互相关函数法 相关性可用互相关函数来表示:
(4) τ是时间间隔。 当 x(t)=y(t)时,互相关
函数就变成了自相关函数。 设 t=0 时,x(t)=0,而且 t
若想得到系统的精确模型可以采取减小截断误差的方法如梯形近似法甚至四阶龙10可以把r看作是系统在rxvxx入下的响应这样要获得该系统的参数模型只需把分别看作xxxv系统的输入和输出然后按最小二乘法估计参数
船舶操纵运动建模中的参数可辨识性问题.pdf

船舶操纵运动建模中的参数可辨识性问题2010年3月29日摘要:为保证系统辨识方法应用于船舶操纵运动建模中的有效性,提高建模精度,研究了船舶操纵运动辨识建模中的参数可辨识性问题.从系统辨识原理和船舶操纵运动数学模型结构特点的角度讨论了参数可辨识性的机理,并结合Mariner船试验数据,应用细长体理论分别计算了附加质量和黏性力导数,并与约束模试验结果进行对比.结果表明,附加质量的理论计算结果具有足够的精度,而黏性力导数的计算结果存在较大误差.为此,在应用系统辨识进行船舶操纵运动建模过程中,可将附加质量预先给定以解决参数可辨识性和提高辨识精度.关键词:船舶操纵运动;系统辨识;参数可辨识性;附加质量;细长体理论0引言对船舶操纵性进行预报是船舶设计阶段的重要工作之一.国际海事组织(IMO)于2002年正式颁布了船舶操纵性标准,对船舶设计阶段的操纵性预报给出了定性和定量的指标,这极大促进了船舶操纵性预报研究.船舶操纵运动数学模型加计算机模拟是一种常用和有效的操纵性预报方法.该方法模型中水动力导数的确定是关键.基于自航模试验或实船试验的系统辨识方法是确定水动力导数的一种方法,该方法简单、有效,而且在应用于实船试验时可以避免因雷诺数不同造成的尺度效应.在辨识技术和试验测量手段不断发展的今天,该方法具有广阔的应用前景.将系统辨识方法应用于船舶操纵运动建模,其思路一般为,将船舶操纵运动视为一个动态的输入-输出响应系统,通过对样本数据的拟合和回归分析,确定船舶操纵运动数学模型中的水动力导数.但是在辨识过程中,并非所有的水动力导数都可以获得,即所谓的参数可辨识性.在给定样本情况下(如果某些水动力导数所对应的变量不可测,显然该导数也是不可辨识的),参数可辨识性主要是由系统辨识方法本身和船舶操纵运动数学模型的结构特点所决定的.从广义的角度,系统辨识过程中的另一个关键性技术问题———参数漂移也可归结为一种参数可辨识性.文献[4]对参数漂移进行了深入的研究.参数可辨识性无疑对系统辨识结果和进一步的船舶操纵性预报结果有重要的影响.目前,解决该问题最有效的方法是结合约束模试验,对自航模试验,可采用理论计算的方法获得部分水动力导数.本文结合Mariner船试验数据,应用细长体理论结果分别计算了附加质量和黏性力导数,并与约束模试验结果进行对比.结果验证了通过附加质量预先给定来处理参数可辨识性方法的有效性.1参数可辨识性机理目前常用的船舶操纵运动数学模型主要包括水动力模型(Abkowitz模型和MMG模型)和响应模型.不论何种模型,一般都可以表示成状态空间模型的形式.文献对该类模型的参数可辨识性问题进行了论述.以一简单的线性三维状态方程为例,其状态空间模型为(1)其中,u为纵向速度;v为横向速度;r为转艏角速度;δ为舵角;θ1~5为附加质量;θ6~10为黏性力导数;θ11~12为舵力导数.记则式(1)可重写为(2)应用系统辨识方法,给定输入δ(k)和输出X(k+1)的时间序列,状态矩阵P-1A和控制矩阵P-1B是可以确定的,但是两个条件无法确定3个未知量P、A、B.一般的,可以先确定附加质量矩阵P,再对其他两个未知量A和B进行辨识.而P的确定可以采用理论计算方法(如细长体理论)或应用数据库(经验公式)方法,也可通过约束模试验测得.目前在应用系统辨识方法进行状态空间模型的水动力导数辨识研究中,附加质量阵的值均预先给定.2附加质量的理论计算和试验比较事实上,应用理论计算得到惯性力导数具有足够的工程精度.文献[6]应用细长体理论计算了横向和转艏方向的附加质量和舵力导数.结果表明,计算结果具有足够的精度.根据文献[6]的计算结果,在细长体假设情况下,船舶作操纵运动时的横向惯性力和转艏惯性力矩分别为(3)(4)其中,ρ为流体密度;d为吃水;L为船长.显然,根据式(3)和(4),附加质量和附加质量惯性矩可计算为(5)(6)(7)(8)无因次化后:(9)而纵向附加质量一般可近似为(10)结合一艘Mariner船的约束模试验,将式(9)和式(10)的计算结果与试验结果比较,结果如表1所示.表1附加质量计算结果与试验值的比较细长体理论计算值约束模试验值/×10-5附加质量(惯性矩)/×10-5Xu′-39.9-42Yv′-728-748Yr′0-9.354Nv′0 4.646Nr′-60.7-43.8由表1可以看出,试验值与理论计算值接近.其中,对Yr′和Nv′乘以相应的角加速度(加速度)后,反映的是船体前后流体惯性力(力矩)的差值.细长体理论假设船体关于横舯剖面前后对称,故Yr′和Nv′值为零.约束模试验结果也表明,与其他附加质量相比,这两个附加质量的数值较小.3黏性力导数理论计算及试验比较前面指出,为解决参数可辨识性问题,可先确定附加质量矩阵P,再对其他两个未知量A(黏性力导数阵)和B(舵力导数向量)进行辨识.从另一个角度,如果能先确定A或B,也可解决参数可辨识性问题.以黏性力导数阵A为例,根据细长体理论,操纵运动船舶的横向黏性力(11)其中,U为船速.根据式(11),可求得黏性线性水动力导数:(12)(13)转艏黏性力矩为(14)可求得线性水动力导数:(15)(16)类似于表1,对Mariner船,把黏性类线性水动力导数的理论计算结果与约束模试验结果比较,结果如表2所示.。
基于改进WLSSVM_的无人艇操纵性参数辨识

第 31 卷第 5 期水下无人系统学报Vol.31 N o.5 2023 年 10 月JOURNAL OF UNMANNED UNDERSEA SYSTEMS Oct. 2023[引用格式] 张海胜, 董早鹏, 杨莲, 等. 基于改进WLSSVM的无人艇操纵性参数辨识[J]. 水下无人系统学报, 2023, 31(5): 687-695.基于改进WLSSVM的无人艇操纵性参数辨识张海胜 1,2, 董早鹏 1,2*, 杨 莲 3, 张铮淇 1,2, 齐诗杰 1,2, 李家康 1,2(1. 武汉理工大学 高性能舰船技术教育部重点实验室, 湖北 武汉, 430063; 2. 武汉理工大学 船海与能源动力工程学院, 湖北 武汉, 430063; 3. 中国船舶集团有限公司 综合技术经济研究院, 北京, 100081)摘 要: 为了实现高精度的无人艇操纵运动辨识建模, 针对最小二乘支持向量机(LSSVM)辨识无人艇2阶非线性响应模型时, 部分参数会辨识不准的问题, 设计了余弦处理方法, 对辨识模型进行重构; 为进一步提高辨识精度, 在此基础上根据数据加权思想, 结合引入变异策略的自适应粒子群算法, 提出了一种可对权值寻优的加权最小二乘支持向量机(WLSSVM)算法。
基于仿真数据和实船数据的辨识结果表明, 余弦方法重构后的模型很好地解决了参数辨识不准的问题, 权值寻优后的WLSSVM进行参数辨识建模具有更高的预报精度。
研究结果能够为无人艇操纵运动的高精度参数辨识建模提供参考。
关键词: 无人艇操纵运动; 运动参数辨识; 最小二乘支持向量机; 自适应粒子群中图分类号: TJ630.33; U661.33 文献标识码: A 文章编号: 2096-3920(2023)05-0687-09 DOI: 10.11993/j.issn.2096-3920.2022-0044Identification of Unmanned Surface Vehicle Maneuverability ParametersBased on Improved WLSSVMZHANG Haisheng1,2, DONG Zaopeng1,2*, YANG Lian3, ZHANG Zhengqi1,2, QI Shijie1,2, LI Jiakang1,2(1. Key Laboratory of High Performance Ship Technology of Ministry of Education, Wuhan University of Technology, Wuhan 430063, China; 2. School of Naval Architecture, Ocean and Energy Power Engineering, Wuhan University of Technology, Wuhan 430063, China; 3. China Institute of Marine Technology & Economy, China State Shipbuilding Corporation Limited, Beijing 100081, China)Abstract: A cosine processing method was designed to achieve high-precision identification modeling of unmanned surface vehicle(USV) maneuvering motion and address the issue that some parameters will be inaccurately identified when the second-order nonlinear response model of USVs is identified by least square support vector machine(LSSVM). On this premise, a weighted LSSVM(WLSSVM) algorithm that could optimize the weight was proposed. The algorithm was based on the idea of data weighting and used the adaptive particle swarm optimization technique with a mutation approach. Based on simulation data and actual ship data, the identification results indicate that the model after cosine reconstruction effectively handles the problem of inaccurate parameter identification. At the same time, the WLSSVM with optimized weights has better prediction accuracy for parameter identification modeling. The research findings can serve as a reference for high-precision parameter identification modeling of USV maneuvering motion.Keywords: unmanned surface vehicle; motion parameter identification; least squares support vector machine; adaptive particle swarm收稿日期: 2022-08-09; 修回日期: 2022-09-13.基金项目: 国家自然科学基金项目(51709214).作者简介: 张海胜(2000-), 男, 在读硕士, 主要研究方向为无人艇操纵性参数辨识.* 通信作者简介: 董早鹏(1988-), 男, 博士, 副教授, 主要研究方向为船舶操纵性参数辩识、海洋无人航行器集群编队与控制.0 引言无人艇具备船型轻巧、操纵灵活、智能化等优良特点, 在军事和民用领域都发挥着强大的作用,一直是近年来各国研究的热点[1]。
基于局部加权学习的船舶操纵运动辨识建模
操纵运动辨识模型。
模型验证
02
使用独立测试集对模型进行验证,评估模型的预测精度和泛化
能力。
评估指标
03
采用均方误差(MSE)、均方根误差(RMSE)等指标对模型
性能进行评估。
结果对比与分析
对比实验
与其他船舶操纵运动辨识方法进行对比,展示局部加权学习算法 的优势。
结果分析
分析局部加权学习算法在船舶操纵运动辨识中的表现,探讨其适 用性和局限性。
国外在船舶操纵运动辨识领域的研究起步较早,积累了丰富的经验。研究重点在 于利用先进的数据处理技术和机器学习方法,提高船舶运动辨识的准确性和实时 性。在算法模型、数据处理和实际应用等方面取得了一系列成果。
02
船舶操纵运动基础理论
船舶运动基本概念
01
02
03
船舶运动
船舶在水中受到外力作用 而产生的位置和姿态变化 。
局部加权学习算法的基本思想是通过计算数据点之间的相似 度来确定权重,并根据权重对数据进行加权平均,以获得更 好的学习效果。
船舶运动辨识模型构建
基于局部加权学习的船舶运动辨识模型首先需要对船舶的运动进行建模 ,包括船舶的航向、速度、加速度等参数。这些参数可以通过传感器进 行测量,也可以通过历史数据估计。
当前研究主要关注于船舶操纵运动辨 识建模,未来可以进一步拓展到船舶 运动控制、船舶行为分析和船舶安全 评估等领域。
未来研究方向
针对船舶操纵运动辨识建模中的非线性动态系统建模问题,可以进一步研究深度学 习、强化学习等先进算法在船舶运动控制和船舶行为分析中的应用。
针对船舶运动数据中的复杂因素影响问题,可以研究基于数据融合、多传感器融合 等技术,以提高船舶操纵运动辨识的准确性和鲁棒性。
基于递推最小二乘的吊舱推进无人水面艇建模与辨识研究

基于递推最小二乘的吊舱推进无人水面艇建模与辨识研究慕东东;王国峰;范云生;赵永生【摘要】为了研究吊舱推进无入水面艇的建模问题,以响应型数学模型为研究重点,应用系统辨识的方法确定其模型参数;根据MMG分离建模的理论建立吊舱推进无人艇的三自由度平面运动数学模型,然后对作用在艇体的力与推进器推力进行分析与假设,将平面运动数学模型化简为响应型数学模型;在得到响应型模型的基础上,通过实船进行回转实验和Z型实验采集相应数据,然后利用递推最小二乘以及数据拟合的方法对模型参数加以辨识;为了验证辨识结果的正确性,对辨识出的响应模型进行模拟仿真并与实际数据进行比较,结果表明:仿真结果与实际数据的误差在可信范围内,由此证明了系统建模与辨识结果的正确性.【期刊名称】《计算机测量与控制》【年(卷),期】2018(026)004【总页数】6页(P131-135,151)【关键词】无人水面艇;吊舱;递推最小二乘;辨识【作者】慕东东;王国峰;范云生;赵永生【作者单位】大连海事大学信息科学技术学院,辽宁大连 116026;大连海事大学信息科学技术学院,辽宁大连 116026;大连海事大学信息科学技术学院,辽宁大连116026;大连海事大学信息科学技术学院,辽宁大连 116026【正文语种】中文【中图分类】U675.910 引言无人水面艇(Unmanned Surface Vehicle, USV)可以作为河流水质监测、水面舰艇跟踪和现代化军事武器,用来执行危险以及不适合人员参与的任务,具有广泛的市场前景,己成为了国内外智能化海洋装备的研究热点[1]。
在复杂多变的海洋环境以及军事对抗中,往往需要USV具有较快的航速以及良好的机动性,这就对其推进器的性能提出了较高的要求。
吊舱式推进器(POD)是近几年发展起来的一种新型船舶推进装置,该装置可以节省船体空间、增加有效载荷、提高船舶推进效率和操纵灵活度,是船舶推进领域最有发展前途的新技术之一[2]。
基于辨识理论的帆板控制系统参数辨识与调整

基于辨识理论的帆板控制系统参数辨识与调整帆板控制系统是指利用帆板作为能量转换器,通过控制帆板姿态来调整船只的运动状态。
在设计帆板控制系统时,参数辨识和调整是非常关键的步骤。
基于辨识理论的帆板控制系统参数辨识和调整是指利用辨识理论和方法来确定控制系统中的参数,并通过调整这些参数来优化系统性能。
1. 帆板控制系统参数辨识参数辨识是指通过实验或观测数据,利用数学模型和辨识方法,估计出系统的模型参数。
对于帆板控制系统,参数辨识的目的是找到帆板的质量、惯性矩阵、摩擦系数等重要参数。
辨识过程可以通过以下步骤进行:1.1 数据采集:收集帆板控制系统的输入和输出数据。
输入数据可以是舵角或风速等控制信号,而输出数据可以是帆板朝向、角度或速度等测量值。
1.2 建立数学模型:根据控制系统的物理特性和运动动力学原理,建立数学模型。
可以采用系统辨识中的ARX、ARMAX或非线性模型等方法。
1.3 参数辨识:基于采集到的数据和建立的数学模型,通过最小二乘法、极大似然法或最优化算法等辨识方法,估计出系统的参数。
1.4 参数验证:利用辨识得到的参数,进行模型仿真或实验验证。
比较辨识模型的输出与实际测量值,评估参数辨识的准确性和可靠性。
2. 帆板控制系统参数调整参数调整是指通过修改系统的参数,以实现更好的控制效果。
对于帆板控制系统,参数调整的目的是改善系统的响应速度、稳定性和鲁棒性。
调整过程可以基于以下原则:2.1 开环调整:在开环条件下,通过修改控制系统的参数,如增益、时间常数等,使得系统的响应快速而稳定。
可以采用试控法、根轨迹法等经典方法进行参数调整。
2.2 闭环调整:在闭环条件下,通过修改控制系统的参数,如比例、积分和微分系数等,使得系统的闭环响应更加稳定和鲁棒。
可以采用PID控制、模糊控制或自适应控制等方法进行参数调整。
2.3 优化调整:利用现代优化方法,如遗传算法、粒子群算法等,通过对控制系统的参数进行全局搜索和优化,以获得最佳的控制效果。
基于改进神经网络算法的舰船操纵性能预报系统
Research on prediction system of ship maneuverability based on improved neural network algorithm
LAI Min (Chongqing Engineering Colleage, Chongqing 400030, China) Abstract: Aiming at the shortcomings of low prediction accuracy, poor stability and slow efficiency of traditional Ship Maneuverability Prediction System, a new Ship Maneuverability Prediction System Based on improved neural network is designed. The improved neural network algorithm is improved by using the conjugate gradient method instead of the original gradient descent algorithm to improve the standard neural network algorithm easily to fall into the local optimum solution. The composition of ship handling stability is described by matrix method, and the prediction system of ship handling stability is designed by using improved neural network algorithm. The experimental results show that the designed system has high prediction accuracy, strong stability and fast efficiency. It can effectively predict the ship handling stability. Key words: neural network;ship handling stability;dynamics;prediction;model
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(24)
式中 为 P 型迭代系数, ek (t) yk (t) kT (t)kLS (t) 。 有上可知,快速收敛迭代学习最小二乘辨识算 法的基本步骤如下: 步骤 1:对于时刻 t,根据公式(21)给定初始
y(t) T (t)(t) e(t)
经过 k 次迭代有
(15)
值P 0 (t) , 0 (t) ,并置 k 0; 步骤 2: 第 k 次重复运行时, 依照式 (20) (24)
摘要:为了解决船舶操纵性参数辨识问题,考虑了船舶运动时域的非线性和非平稳的特点,提出了一种快速收敛 迭代学习最小二乘算法,提高了参数辨识速度和精度。首先建立了船舶操纵一阶和二阶非线性运动响应模型,并 将其离散化;然后采用迭代学习思想,并引入了 P 型学习率,改进递推最小二乘算法,进行参数辨识;同时分析 了该算法的收敛性;最后进行了相关实验。实验结果证明了该算法的可行性和有效性。 关键词:最小二乘法;参数辨识;迭代学习;船舶操纵性;响应模型 中图分类号:U661
T [a 1, a2,b 1] ,则(3)式可化为
y (t) T (t) (t)
令 y (t) r(t 1) , (7)
r r3 K KT TTr T 1 2( 1 T 2 )r 3
(t) [r(t), r(t 1), r3(t 1),(t),(t 1)]T ,
收稿日期: 基 金 项 目 : 国 家 自 然 科 学 基 金 ( 50979020 ) ,海洋能专项基金 (ghme2010gc02) 。 作者简介:秦余钢(1981-) ,男,博士研究生。研究方向:海洋潮流能 利用。E-mail:qinyugang@
船舶设计阶段进行操纵性预报和评估是最实用和有 效的方法[2]。 该方法的需要对船舶的运动模型进行 数学建模,而确定数学模型中众多的水动力导数则 是建模的关键。 目前, 利用系统辨识的方法来确定水动力导数 是最简单有效的方法之一。而最小二乘法则是系统 辨识中最基本方法[3],它具有系统先验统计知识 少,算法简单,计算量少,收敛性好等特点。特别 是递推最小二乘法避免了矩阵求逆的运算,实现了 参数在线辨识。但是在辨识的精度和速度上还可以 继续提高。而迭代学习方法采用“在重复中学习” 的策略[4], 具有记忆系统和经验修正机制, 使递推 最小二乘算法具有了某种智能[5]。 它可以从过去的 系统输入输出和参数估计中获得额外的信息,并不 断训练辨识器,为改进参数估计提供了可能性,使 辨识效果越来越好。 本文从基础最小二乘法出发,采用迭代学习的
ek (t) yk (t) kT (t)k (t)
Yk (t) [y1(t), y2(t), , yk (t)]T k (t) [1(t),2(t), ,k (t)]T k (t) [e1(t),e2(t), ,ek (t)]T
则有
t t 1,转步骤 1。
2.3 收敛性分析 (17)
定 r(t) 0,(t) 0,t 0。 2.2 快速收敛迭代学习最小二乘法 在 t 时刻,由式(9)可以得到
式中, 为一个小正数, Nm ax 为设定的迭代最大次 数。 为了加快收敛速度,增加了 P 型迭代项。即
(t) k (t) kLS (t) k (t)e k
Parametric Identification of Ship's Maneuvering Motion Based on Improved Least Square Method
Qin Yugang1,Zhang Liang1
(1. Harbin Engineering University ,College of Shipbuilding Engineering)
Abstract:In order to solve the problem of parameter identification of ship's Maneuvering Motion, a fast convergent iterative least squares algorithm is presented considering nonlinear and non-stationary characteristics of ship motion in time domain. The speed and precision of parameter identification have been improved using this algorithm. Firstly, the models of ship's first-order and second-order nonlinear response motion were established and made discrete. Then, parameters identification were made using new least squares algorithm which was improved by using iterative learning and introducing p-type learning rate. And the convergence of the algorithm was also analyzed. At last, the simulation experiments were conducted. The experimental results demonstrate that the algorithm is feasible and effective. Key words:least square method;parameter identification;interactive learning;ship maneuvering;response model
网络出版时间:2015-03-23 10:52 网络出版地址:/kcms/detail/22.1341.T.20150323.1052.004.html
基于改进最小二乘算法的船舶操纵性参数辨识
秦余钢 1,张亮 1 (1 哈尔滨工程大学 船舶工程学院 哈尔滨市 150001)
yk (t) kT (t)k (t) ek (t)
令
(16)
更新 P k (t) 和 k (t) ; 步骤 3:根据式(23)检验迭代学习终止条件。 如果满足条件则转步骤 4,否则, k k 1,转步骤 2; 步骤 4 :根据公式( 22 )更新 (t) 和 P(t) ,
0
前言
*
船舶操纵性是船舶水动力性能研究的重点之 一,关系到船舶航行的安全问题。经过近30年的发 展,船舶操纵性研究越来越为人们所重视,出现以 “船舶操纵性暂行标准”和“正式标准”为代表的 重大成果。该标准是国际海事组织(International Maritime Organization, IMO)征询了各成员国的建 议后,先后于1993年和2002 年颁布 [1]。标准对船 舶设计阶段的操纵性预报以及船舶应满足的操纵性 指标提出了明确的定量要求,极大地促进了船舶操 纵性预报研究。通过建立船舶操纵运动仿真系统在
Yk (t) kT (tFra bibliotekk (t) k (t)
考虑下述指标函数
k (t) k (t)- 则 令
k (t)- k1(t) k (t)-k1(t)= P k (t) e (t)+ (t)e (t) k1(t) k k k 1kT (t)P ( t ) ( t ) k1 k
[a1, a2, a3,b1,b2 ]T ,则(5)式可以化为
y (t) T (t) (t)
(8)
(2)
式中 K , T 1, T 2和T 3 是操纵性指数, 是非线性 项系数。 将(1)式前向差分离散化可得
3 r(t 1) a 1r(t) a2r (t) b 1(t) (t) (3)
(23)
P(t)(t 1)[y(t 1) (t 1) (t)] (13) (t 1) (t) 1T (t 1)P(t)(t 1) [P(t)(t 1)][P(t)(t 1)]T (14) P(t 1) P(t) 1T (t 1)P(t)(t 1) 初值 (0) 0, P(0) I 。 为非常大的正数。且规
3
式中 e(t) y(t) T (t)(t) .
, y(t)]T , 令 Y(t) [y(1), y(2), (t) [(1),(2),,(t)]T ,则性能指标 J 可以写成
与二阶非线性船舶操纵性指数的关系为:
J [Y(t) T (t)(t)]T[Y(t) T (t)(t)]
(6)
1
1.1
船舶操纵运动模型的建立
试验方法 目前,经过理论分析和实践检验的船舶操纵运 [7-9] 动模型主要有两类 :一类是水动力模型;另一类 是响应模型。考虑到船舶操纵性参数尽量少,同时 兼顾其可观测性,采用经典的KT方程作为船舶数学 模型。 该模型中包含K、 T等操纵性指数,这些指数可 由一些线性水动力导数求得。 一阶非线性响应模型[10]: r r3 K Tr (1) 式中 r 是转艏角速度, 是舵角, K 和 T 是操纵性 指数, 是非线性项系数。 二阶非线性响应模型
离散化可得,
y(t) T (t) (t)
值 (t) ,使其极小化模型残差平方和[11]
(9)
最小二乘法的原理就是寻求未知向量 的估计
J e2 (t)
N t 1
(10)
r(t 1) ar 1 (t) a2r(t 1) a 3r (t 1) (5) b 1 (t) b 2 (t 1) (t) 式中 a1 , a2 , a3 , b 1和 b 2 为待辨识的系数项,它们
船舶操纵性参数辨识的问题就是已知船舶运动 状态序列 r(t) 和 (t) , t 1,2,3, , N ,求解 a1 , a2 , a3 , b1 和 b2 ,进而计算非线性船舶操纵性指数 K ,