最小二乘参数辨识方法及原理
最小二乘法的原理及其应用

最小二乘法的原理及其应用-CAL-FENGHAI.-(YICAI)-Company One1最小二乘法的原理及其应用一、研究背景在科学研究中,为了揭示某些相关量之间的关系,找出其规律,往往需要做数据拟合,其常用方法一般有传统的插值法、最佳一致逼近多项式、最佳平方逼近、最小二乘拟合、三角函数逼近、帕德(Pade)逼近等,以及现代的神经网络逼近、模糊逼近、支持向量机函数逼近、小波理论等。
其中,最小二乘法是一种最基本、最重要的计算技巧与方法。
它在建模中有着广泛的应用,用这一理论解决讨论问题简明、清晰,特别在大量数据分析的研究中具有十分重要的作用和地位。
随着最小二乘理论不断的完善,其基本理论与应用已经成为一个不容忽视的研究课题。
本文着重讨论最小二乘法在化学生产以及系统识别中的应用。
二、最小二乘法的原理人们对由某一变量t或多个变量t1…..tn 构成的相关变量y感兴趣。
如弹簧的形变与所用的力相关,一个企业的盈利与其营业额,投资收益和原始资本有关。
为了得到这些变量同y之间的关系,便用不相关变量去构建y,使用如下函数模型,q个相关变量或p个附加的相关变量去拟和。
通常人们将一个可能的、对不相关变量t的构成都无困难的函数类型充作函数模型(如抛物线函数或指数函数)。
参数x是为了使所选择的函数模型同观测值y相匹配。
(如在测量弹簧形变时,必须将所用的力与弹簧的膨胀系数联系起来)。
其目标是合适地选择参数,使函数模型最好的拟合观测值。
一般情况下,观测值远多于所选择的参数。
其次的问题是怎样判断不同拟合的质量。
高斯和勒让德的方法是,假设测量误差的平均值为0。
令每一个测量误差对应一个变量并与其它测量误差不相关(随机无关)。
人们假设,在测量误差中绝对不含系统误差,它们应该是纯偶然误差,围绕真值波动。
除此之外,测量误差符合正态分布,这保证了偏差值在最后的结果y上忽略不计。
确定拟合的标准应该被重视,并小心选择,较大误差的测量值应被赋予较小的权。
各类最小二乘算法

β N −1 H* = N 0
β N −2
β 2( N −1) WN = 0
β 2( N −2)
0 ⋱ 1
三、递推算法 ∵
k θ(k ) = ∑ β i =1
∧
2(k −i) h (i )h T (i )
2随着采样次数的增多数据量不断增加ls估计有可能出现所谓的数据饱和现象导致递推算法不能接近参数真二关于数据饱和现象的分析所谓数据饱和现象就是随着时间的推移采集到的数据越来越多新数据所提供的信息被淹没在老数据的海洋之中
Ⅴ 各种最小二乘类参数辨识算法 §1 概 述
最小二乘类参数辨识算法(一次完成算法、递推算法) 最小二乘类参数辨识算法 (一次完成算法 、 递推算法 ) 是一种 最基本和常用的参数估计方法。但研究和应用表明, 最基本和常用的参数估计方法。 但研究和应用表明, 这一算 法仍存在明显的不足。 法仍存在明显的不足。 一、LS 算法的主要不足之处 1、当模型噪声为有色噪声时,LS 估计不再是无偏估计、一致 、当模型噪声为有色噪声时, 估计不再是无偏估计、 估计。 估计。 2、随着采样次数的增多,数据量不断增加,LS估计有可能出 、随着采样次数的增多,数据量不断增加, 估计有可能出 现所谓的“数据饱和”现象, 现所谓的“数据饱和”现象,导致递推算法不能接近参数真 值。
于是有: 于是有:
α P ( k ) P − 1 ( k − 1) = I − P ( k ) h ( k ) h T ( k )
则:
ˆ θ ( k ) = P ( k ) H * T Z * = P ( k ) α H * −1T Z * −1 + h ( k ) z ( k ) k k k k
现代控制理论_第14章_最小二乘法辨识
y n 2 ai y n 2 i bi u n 2 i n 2
i 1 i 0
n
y n N ai y n N i bi u n N i n N
即
y k ai y k i bi u k i v k ai v k i
i 1 i 0 i 1
n
n
n
(14-3)
假设v k k 1,2,, n 是均值为零的独立分布的平稳随机序列,且与 序列u k k 1,2,, n 相互独立。设
ˆ 表示 y 的最优估值,则有 设ˆ 表示 的最优估值, y
ˆ ˆ y
(14-12)
式中
ˆ n 1 y a ˆ ˆ y n 2 ˆ ˆ y , b ˆ ˆ y n N
T 的展开式如下所示:
y n 1 y n y n y n 1 y 1 y 2 T u n 1 u n 2 u n 1 u n u 2 u 1 y n N 1 n 1 y n N 2 n 2 yN u n N u n N 1 n N uN
1
因为ˆ 有解与 T 正定等价,所以可以保证 T 正定来确定对输 入 u k 序列的要求。由式(14-9)可知
Y U
(14-20)
则
YT U YT U Y T Y U T T T U Y U U U
第五章 最小二乘法辨识
服从正态分
❖ 4)有效性
❖ 定理4:假设 (k) 是均值为零,方差为 2I 的正态
白噪声,则最小二乘参数估计量
^
是有效估计
量,即参数估计误差的协方差达到Cramer-Rao不
等式的下界
E (^
^
)(
)T
2E
(
T N
N
) 1
M 1
❖ 其中M为Fisher信息矩阵。
4、适应算法
❖ 随着更多观测数据的处理,递推最小二乘法对线性 定常系统的参数估计并非越来越精确,有时会发现
❖ 现举例说明最小二乘法的估计精度 ❖ 例5.1:设单输入-单输出系统的差分方程为
y(k) a1y(k 1) a2 y(k 2) b1u(k 1) b2u(k 2) (k)
❖ 设 u(k)是幅值为1的伪随机二位式序列,噪声 (k)是 一个方差 2可调的正态分布 N(0, 2 )随机序列。
❖ 为了克服数据饱和现象,可以用降低旧数据影响的 办法来修正算法。而对于时变系统,估计k时刻的 参数最好用k时刻附近的数据估计较准确。否则新 数据所带来的信息将被就数据所淹没。
❖ 几种算法:渐消记忆法,限定记忆法与振荡记忆法
❖ 矩阵求逆引理:设A为 n n 矩阵,B和C为 n m 矩阵,
并且A, A和 BCT I CT都A是1B 非奇异矩阵,则有矩
阵恒等式
A BCT 1 A1 A1B(I CT A1B)1CT A1
❖
令
A
PN1
,B
N 1
,C
T N 1
,根据引理有
PN1
T N 1 N 1
1
❖ 算法中,^ N 为2n+1个存贮单元(ai ,bi ,i 1,2, , n), 而 PN 是 (2n 1) (2n 1)维矩阵,显然,将 N 换成 PN 后,存贮量大为减少(因为n为模型的阶数,一般 远远小于N)
最小二乘参数辨识方法及原理

2.2 一般最小二乘法原理及算法
z (k ) a i y (k i) bi u (k i) v (k )
i 1 i 1 n n
如果定义
h ( k ) [ y ( k 1), y ( k 2 ), , y ( k n ), u ( k 1), u ( k 2 ), , u ( k n )]
1 1 1
1 1 1
1
1
1
z1 1 1 ( z 1 z 2 ) 2 z2
r 1 0 0 1 1 4 r 1 1 1 1
2、最小二乘辨识方法的基本概念
通过试验确定热敏电阻阻值和温度间的关系
t (C ) R ( )
t1 R1
t2 R2
tN
1
tN RN
RN
1
R a bt
• 当测量没有任何误差时,仅需2个测量值。 • 每次测量总是存在随机误差。
y i R i v i 或 y i a bt v i
v i y i R i 或 v i= y i a bt i
常见做法:
太复杂 使
max | y i R i |
1 i N
N
最小 /* minimax problem */ 不可导,求解困难
使 |y
i 1
i
Ri |
最小
最小
使 |y
i 1
m
i
Ri |
H
2
1 1
r R 0
0 4r
电机动态参数的鲁棒最小二乘辨识方法研究

电机动态参数的鲁棒最小二乘辨识方法研究电机动态参数的鲁棒最小二乘辨识方法是一种常用的电机参数辨识方法,它可以通过对电机的输入输出数据进行处理,得到电机的动态参数,从而实现对电机的控制和优化。
本文将介绍电机动态参数的鲁棒最小二乘辨识方法的研究。
一、电机动态参数的鲁棒最小二乘辨识方法的基本原理电机动态参数的鲁棒最小二乘辨识方法是一种基于最小二乘法的电机参数辨识方法。
它的基本原理是利用电机的输入输出数据,通过最小二乘法对电机的动态参数进行辨识。
具体来说,它可以通过以下步骤实现:1. 收集电机的输入输出数据,包括电机的电流、电压、速度、位置等参数。
2. 建立电机的动态模型,包括电机的电路模型和机械模型。
3. 利用最小二乘法对电机的动态参数进行辨识,包括电机的电阻、电感、转动惯量、摩擦系数等参数。
4. 对辨识结果进行鲁棒性分析,评估辨识结果的可靠性和精度。
二、电机动态参数的鲁棒最小二乘辨识方法的研究进展电机动态参数的鲁棒最小二乘辨识方法是一种经典的电机参数辨识方法,已经得到了广泛的应用和研究。
近年来,随着电机控制技术的不断发展和电机应用领域的不断拓展,电机动态参数的鲁棒最小二乘辨识方法也得到了进一步的研究和改进。
1. 基于神经网络的电机参数辨识方法神经网络是一种强大的模式识别和数据处理工具,已经被广泛应用于电机参数辨识领域。
基于神经网络的电机参数辨识方法可以通过对电机的输入输出数据进行训练,得到电机的动态参数,具有较高的精度和鲁棒性。
2. 基于模糊逻辑的电机参数辨识方法模糊逻辑是一种基于模糊集合理论的推理方法,可以处理不确定性和模糊性问题。
基于模糊逻辑的电机参数辨识方法可以通过对电机的输入输出数据进行模糊化处理,得到电机的动态参数,具有较高的鲁棒性和可靠性。
3. 基于深度学习的电机参数辨识方法深度学习是一种基于神经网络的机器学习方法,可以处理大规模、高维度的数据。
基于深度学习的电机参数辨识方法可以通过对电机的输入输出数据进行深度学习,得到电机的动态参数,具有较高的精度和鲁棒性。
最小二乘法的原理及其应用

最小二乘法的原理及其应用一、研究背景在科学研究中,为了揭示某些相关量之间的关系,找出其规律,往往需要做数据拟合,其常用方法一般有传统的插值法、最佳一致逼近多项式、最佳平方逼近、最小二乘拟合、三角函数逼近、帕德(Pade)逼近等,以及现代的神经网络逼近、模糊逼近、支持向量机函数逼近、小波理论等。
其中,最小二乘法是一种最基本、最重要的计算技巧与方法。
它在建模中有着广泛的应用,用这一理论解决讨论问题简明、清晰,特别在大量数据分析的研究中具有十分重要的作用和地位。
随着最小二乘理论不断的完善,其基本理论与应用已经成为一个不容忽视的研究课题。
本文着重讨论最小二乘法在化学生产以及系统识别中的应用。
二、最小二乘法的原理人们对由某一变量t或多个变量t1…..tn 构成的相关变量y感兴趣。
如弹簧的形变与所用的力相关,一个企业的盈利与其营业额,投资收益和原始资本有关。
为了得到这些变量同y之间的关系,便用不相关变量去构建y,使用如下函数模型,q个相关变量或p个附加的相关变量去拟和。
通常人们将一个可能的、对不相关变量t的构成都无困难的函数类型充作函数模型(如抛物线函数或指数函数)。
参数x是为了使所选择的函数模型同观测值y相匹配。
(如在测量弹簧形变时,必须将所用的力与弹簧的膨胀系数联系起来)。
其目标是合适地选择参数,使函数模型最好的拟合观测值。
一般情况下,观测值远多于所选择的参数。
其次的问题是怎样判断不同拟合的质量。
高斯和勒让德的方法是,假设测量误差的平均值为0。
令每一个测量误差对应一个变量并与其它测量误差不相关(随机无关)。
人们假设,在测量误差中绝对不含系统误差,它们应该是纯偶然误差,围绕真值波动。
除此之外,测量误差符合正态分布,这保证了偏差值在最后的结果y上忽略不计。
确定拟合的标准应该被重视,并小心选择,较大误差的测量值应被赋予较小的权。
并建立如下规则:被选择的参数,应该使算出的函数曲线与观测值之差的平方和最小。
用函数表示为:用欧几里得度量表达为:最小化问题的精度,依赖于所选择的函数模型。
最小二乘法辨识参数
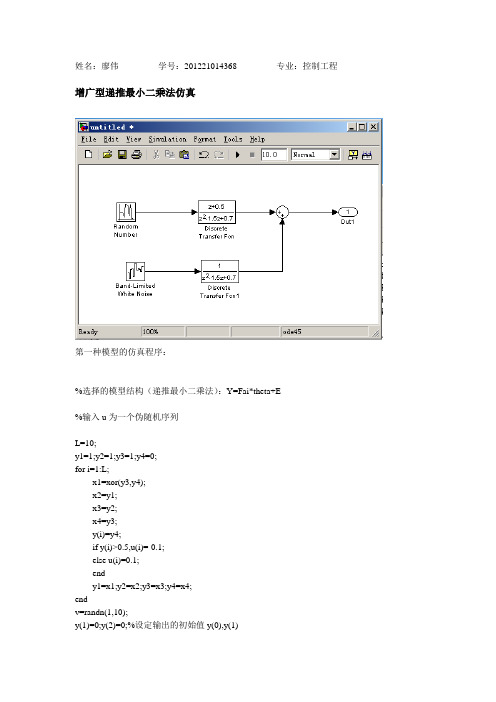
姓名:廖伟学号:201221014368 专业:控制工程增广型递推最小二乘法仿真第一种模型的仿真程序:%选择的模型结构(递推最小二乘法):Y=Fai*theta+E%输入u为一个伪随机序列L=10;y1=1;y2=1;y3=1;y4=0;for i=1:L;x1=xor(y3,y4);x2=y1;x3=y2;x4=y3;y(i)=y4;if y(i)>0.5,u(i)=-0.1;else u(i)=0.1;endy1=x1;y2=x2;y3=x3;y4=x4;endv=randn(1,10);y(1)=0;y(2)=0;%设定输出的初始值y(0),y(1)theta0=[0.01;0;0.01;0;0.01];%给出待辨识参数的初始值P0=10^6*eye(5);%生成初始矩阵7x7的单位阵E=0.00005;%E为递推结束的条件%下面进行递推运算for k=3:10y(k)=1.5*y(k-1)-0.7*y(k-2)+1.0*u(k-1)+0.5*u(k-2)+v(k);%产生输出y Fai1=[-y(k-1) -y(k-2) u(k-1) u(k-2) v(k)]';%生成实测数据组Fai1K1=P0*Fai1/(1+Fai1'*P0*Fai1);theta1=theta0+K1*(y(k)-Fai1'*theta0);e1=theta1-theta0;%e2=e1/theta1;P1=P0-K1*Fai1'*P0;theta0=theta1;%供下次递推使用P0=P1;%供下次递推使用if abs(e1)<E,break;%循环结束条件endendtheta1辨识的参数的最后结果为:theta1 =-1.50000.70001.00000.50001.0000可以从结果看出,辨识的效果很好,基本没有误差。
第二种模型的仿真程序:%选择的模型结构(增广最小二乘法):Y=Fai*theta+E %输入u为一个伪随机序列L=10;y1=1;y2=1;y3=1;y4=0;for i=1:L;x1=xor(y3,y4);x2=y1;x3=y2;x4=y3;y(i)=y4;if y(i)>0.5,u(i)=-0.1;else u(i)=0.1;endy1=x1;y2=x2;y3=x3;y4=x4;endv=randn(1,10);%噪声干扰随机数序列y(1)=0;y(2)=0;%设定输出的初始值y(0),y(1)theta0=[0.01;0;0.01;0;0.01;0;0];%给出待辨识参数的初始值P0=10^6*eye(7);%生成初始矩阵7x7的单位阵E=0.00005;%E为递推结束的条件%下面进行递推运算for k=3:10y(k)=1.5*y(k-1)-0.7*y(k-2)+1.0*u(k-1)+0.5*u(k-2)+v(k)-v(k-1)+0.2*v(k-2);%产生输出y Fai1=[-y(k-1) -y(k-2) u(k-1) u(k-2) v(k) v(k-1) v(k-2)]';%生成实测数据组Fai1K1=P0*Fai1/(1+Fai1'*P0*Fai1);theta1=theta0+K1*(y(k)-Fai1'*theta0);e1=theta1-theta0;%e2=e1/theta1;P1=P0-K1*Fai1'*P0;theta0=theta1;%供下次递推使用P0=P1;%供下次递推使用if abs(e1)<E,break;%循环结束条件endendtheta1辨识的参数最后结果为:-1.50.699990.998890.500191.0001-10.19991从辨识的结果看出,所得结果与真实的模型参数很接近,辨识效果也很好。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
T 1 T ˆ (H m H m ) H m Z m
最小二乘估计虽然不能满足式(3.12)中的每一个方程,使 每个方程都有偏差,但它使所有方程偏差的平方和达到最小,兼 顾了所有方程的近似程度,使整体误差达到最小,这对抑制测量 误差 v(i)(i 1,, m) 是有益的。
2.2 一般最小二乘法原理及算法
当系统的量测噪声 Vm 是均值为 0,方差为 R 的随机向 量,则最小二乘估计有如下性质。
(1) 最小二乘估计是无偏估计,即
~ ˆ E( ) 或 E( ) 0
(2) 最小二乘估计的均方误差为
T T T E( ) (H m H m ) 1 H m RHm (H m H m ) 1
z (k ) ai y(k i) bi u (k i) v(k )
i 1 i 1
n
n
z (k ) 为系统输出量的第 k 次观测值; y(k ) 为系统输出量的第 k 次真值; u (k ) 为系统的第 k 个输入值;
v(k ) 是均值为 0 的随机噪声。
2.2 一般最小二乘法原理及算法
T m T m T m
1
1
2.2 一般最小二乘法原理及算法
例 3.2
用 2 台仪器对未知标量 各直接测量一次,量
测量分别为 z 1 和 z 2 ,仪器的测量误差均值为 0,方差分别 为 r 和 4 r 的随机量,求 的最小二乘估计,并计算估计的 均方误差。
z1 Z2 z2
r 0 R 0 4 r
z1 1 1 ˆ 1 1 ( z1 z 2 ) 1 1 1 z2 2
[a1 , a2 ,, an , b1 , b2 ,, bn ]
T
z (k ) h(k ) v(k )
式中 为待估参数。
2.2 一般最小二乘法原理及算法
z (k ) h(k ) v(k )
y(1 n) u (0) y(2 n) u (1) y(m n) u (m 1) u (1 n) u ( 2 n) u ( m n)
和最小,即
ˆ) (Z H ˆ)T (Z H ˆ) min J ( m m m m
J ˆ) 0 2 H ( Z m H m
T m
ˆ
T ˆ H H m H m Z m T m
2.2 一般最小二乘法原理及算法
T
令 k 1,2,, m ,则有
z (1) h(1) y(0) z (2) h(2) y(1) Hm Zm z ( m ) h ( m ) y(m 1)
使 | y
i
测量误差的平方和最小
2.1 利用最小二乘法求模型参数
根据最小二乘的准则有
J min vi2 [ Ri (a bti )]2
i 1 i 1 N N
根据求极值的方法,对上式求导
N J 2 ( Ri a bti ) 0 a a a i 1 ˆ N J 2 ( Ri a bti )t i 0 i 1 b bbˆ
2.1 利用最小二乘法求模型参数
例:表 1 中是在不同温度下测量同一热敏电阻的阻值,根 据测量值确定该电阻的数学模型, 并求出当温度在 70 C 时
的电阻值。
表 1 热敏电阻的测量值
t (C ) R ()
20.5 765
26 790
32.7 826
40 850
~ T 1 T T 1 T E( ) E[(H m H m ) (H m H m ) (H m H m ) H m Z m ]
T T (H m H m ) 1 H m E(H m Z m )
T T (Hm Hm )1 Hm E(Vm ) 0
系统辨识
第4章 最小二乘参数辨识方法
主讲教师:赵龙 办公地点:新主楼E402 网 站:
Email:flylong@
本章内容
1、最小二乘辨识的基本概念
2、一般最小二乘辨识方法
3、加权最小二乘辨识方法
4、递推最小二乘参数辨识方法
小。
2、最小二乘辨识方法的基本概念
通过试验确定热敏电阻阻值和温度间的关系
t (C ) R ()
t1 R1
t2 R2
t N 1 RN 1
tN
RN
R a bt
• 当测量没有任何误差时,仅需2个测量值。 • 每次测量总是存在随机误差。
yi Ri vi 或 yi a bt vi
vi yi Ri或vi=yi a bti
太复杂
常见做法:
| yi Ri | 最小 /* minimax problem */ 使 max 1 i N
使
| y
i 1
m i 1
N
i
Ri |
Ri |2
最小
最小
不可导,求解困难
• 高斯自己独创了一套行星轨道计算 理论。 • 高斯仅用1小时就算出了谷神星的 轨道形状,并进行了预测 •1794年,高斯提出了最小二乘的思想。
1794年,高斯提出的最小二乘的基本原理是 未知量的最可能值是使各项实际观测值和计算
值之间差的平方乘以其精确度的数值以后的和为最
5、增广最小二乘辨识方法 6、多变量最小二乘辨识方法
本章的学习目的
1、掌握最小二乘参数辨识方法的基本原理
2、掌握常用的最小二乘辨识方法 3、熟练应用最小二乘参数辨识方法进行模型参数辨识 4、能够编程实现最小二乘参数辨识
1、引言
z
m次独立试验的数据
~ ~T
~ ˆ (1) 最小二乘估计是无偏估计,即 E( ) 或 E( ) 0
证明:
ˆ (H T H ) 1 H T Z m m m m ~ ˆ) E[ (H T H )1 H T Z ] E( ) E( m m m m ~
t (k )
G( z)
y (k )
(t1 , y1 ) (t2 , y2 )
(tm , ym )
f (t )
t
f (t ) a0 a1h1 (t ) a2 h2 (t ) an hn (t )
• 1801年初,天文学家皮亚齐发现了谷神星。 •1801年末,天文爱好者奥博斯,在高斯预 言的时间里,再次发现谷神星。 •1802年又成功地预测了智神星的轨道。
N J 2 ( Ri a bti ) 0 a a a i 1 ˆ N J 2 ( Ri a bti )t i 0 i 1 b bbˆ
ˆ t ˆ N a b Ri i i 1 i 1 N N N 2 ˆ a ˆ t i b t i Ri t i i 1 i 1 i 1
N N
N N N N 2 R t i i Ri t i t i i 1 i 1 a ˆ i 1 i 1 2 N N 2 N ti ti i 1 i 1 N N N N Ri t i Ri t i i 1 i 1 b ˆ i 1 2 N N 2 N ti ti i 1 i 1
z (k ) ai y(k i ) bi u (k i) v(k )
i 1 i 1
n
n
如果定义
h(k ) [ y(k 1), y(k 2),, y(k n),u(k 1),u(k 2),, u(k n)]
(2) 最小二乘估计的均方误差为
T T T E( ) (H m H m ) 1 H m RHm (H m H m ) 1
~ ~T
证明: 根据第(1)式的证明,显然有
T T T T E( ) (Hm Hm )1 Hm E(VmVm )Hm (H Hm ) H RHm ( H Hm )
51 873
61 910
73 942
80 980
88 1010
95.7 1032
表 1 热敏电阻的测量值
t (C ) R ()
20.5 765
26 790
32.7 826
40 850
51 873
61 910
73 942
80 980
88 1010
95.7 1032
R a bt
N ˆ N N 2 N a 702 Ri t i.762 Ri t i t i i 1 i 1 a ˆ i 1 i 1 2 N N ˆ 2 N t t b 3. 4344 i i i 1 i 1 N N N N Ri t i Ri t i i 1 i 1 b ˆ i 1 R 943 N .168 N 2 N t i2 t i i 1 i 1
a1 an b1 bn
T
Vm v(1) v(2) v(m)
Z m H m Vm
2.2 一般最小二乘法原理及算法
最小二乘的思想就是寻找一个 的估计值 ˆ ,使得各次测量
ˆ ˆ H 的 Z i (i 1,m) 与由估计 ˆ 确定的量测估计 Z i i 之差的平方