主流程负载计算
简述mapreduce的运行流程

简述mapreduce的运行流程MapReduce是一种用于在大规模数据集上并行计算的模型,它由Google 公司提出并应用于分布式计算领域。
MapReduce的核心思想是将计算任务拆分为多个阶段,并在多台计算机上进行并行计算,从而提高计算效率。
本文将从MapReduce的基本概念开始,逐步解释其运行流程。
一、MapReduce概述MapReduce模型将计算任务分为两个阶段:Map(映射)和Reduce(归约)。
Map阶段将输入数据集划分为多个子集,并为每个子集生成一组键-值对。
Reduce阶段将相同键的键-值对进行归约操作,生成最终结果。
在MapReduce中,计算任务的执行由一个主节点(称为JobTracker)和多个工作节点(称为TaskTracker)协同完成。
二、任务提交阶段1.生成任务:用户向计算集群提交一个MapReduce任务,并指定输入数据集的路径、Map函数、Reduce函数等信息。
提交任务后,JobTracker 为该任务生成一个唯一的任务ID,并将任务添加到待处理任务列表中。
2.任务划分:JobTracker根据输入数据的大小和计算资源的可用情况,将任务划分为若干个MapTask和ReduceTask,并将它们分配给相应的TaskTracker进行处理。
3.任务分配:JobTracker根据与各个TaskTracker之间的网络延迟和负载情况等因素,将MapTask和ReduceTask分配给合适的TaskTracker。
任务分配过程相对复杂,需要考虑多个因素,以实现负载均衡和最大化计算资源的利用率。
三、Map阶段1.数据划分:每个Map任务在启动时,首先从数据源中读取输入数据集。
输入数据集通常被划分为多个等大小的数据块,每个数据块由单独的Map 任务处理。
2.Map函数执行:每个Map任务将输入数据块作为输入,并根据用户定义的Map函数对数据进行处理。
Map函数将输入数据转换为一组键-值对,并将它们输出到本地磁盘上的临时输出文件中。
基于STC单片机的智能电子负载

基于STC单片机的智能电子负载夏桂书【摘要】为了方便电工电子学等基础电类实验室对电源的测试,设计了一种实验教学中使用的简易直流恒流电子负载.系统采用STC12C5616AD单片机作为控制部分,采用运放与MOSFET构成恒流电路,通过D/A转换控制恒流电路的放电电流,利用MOSFET的耗散消耗能量.单片机可设定系统的多种工作模式,利用四线测量技术减小系统误差.经测试,系统能够稳定工作在恒流模式下,负载电流从10~3 000 mA可调,分辨率为5 mA,并能够检测实际工作电压和电流,具有动态负载功能.测试结果表明,该电子负载恒流效果良好,测量误差在1%以内,满足实验室使用需求,具有很强的实用推广价值.【期刊名称】《实验室研究与探索》【年(卷),期】2014(033)003【总页数】5页(P115-118,130)【关键词】电子负载;恒流;MOSFET;动态负载;STC单片机【作者】夏桂书【作者单位】中国民用航空飞行学院航空工程学院,四川广汉618307【正文语种】中文【中图分类】TM9320 引言电源测试在电源的设计和检验当中起着重要的作用,在电工电子实验的教学中,常常需要对学生设计制作的各类电源进行测试。
传统的测试方法是外接功率电阻,通过改变电阻的阻值来改变负载电流,完成对电源带负载能力的测试[1]。
但是这种测试方法具有很大的局限性,不能方便地和连续地改变负载电流,在对负载电流测试的时候需要外接电流表,使测试过程变得复杂化[2]。
现在比较先进的电源测试方法是通过专业电子负载进行。
但目前市面上的电子负载大多价格昂贵,体积庞大。
限制了大范围的推广和使用。
本文针对传统测试方法和成品电子负载的不足,设计了一种简单、实用、经济性比较高的简易直流恒流电子负载。
1 系统组成系统以STC12C5616AD单片机为核心,通过按键设置放电电流和工作模式;通过A/D转换电路检测实际工作电流,和当前被测电源电压;单片机控制D/A转换电路的输出电压到恒流模块,从而控制输出电流,完成对输出电流的设置和调节;系统可通过液晶实时显示当前电流、电压和工作状态,实现简单化的电源测试[3-6]。
主成分分析法pca的流程

主成分分析法pca的流程
主成分分析(PCA)是一种常见的数据降维方法,其主要流程如下:
1. 数据预处理:先对原始数据进行标准化(均值中心化和方差缩放),保证各个维度数据具有可比性。
2. 计算协方差矩阵:通过样本数据求解协方差矩阵,反映各个变量间的线性相关性。
3. 特征值与特征向量计算:对协方差矩阵进行特征值分解或奇异值分解,得到对应的特征值和特征向量。
4. 选择主成分:按照特征值大小排序,选择前k个最大特征值对应的特征向量作为新的坐标轴(主成分)。
5. 数据转换:将原始数据投影到选定的主成分上,实现降维,新坐标系下的数据称为主成分得分。
6. 解释主成分:根据特征向量的结构理解主成分代表的含义,并可能通过累计贡献率评估降维效果。
总之,PCA通过挖掘数据内在结构,将高维数据转换为低维表示,同时保留主要变异信息。
APS计划三步算法详细流程图

Pull 2
Jump from here to Pull Plan Subflow 2 (p. 5)
如果计划供应能完整的满足物料需求,计划就完 成了.(不必计划这个物料的子项了).
如果物料定义了时界,当分配库存时,就要考虑时 界..
4
Pull 2
Pull Plan Subflow 2
子 吗项 ? 需求满Ye足s
Push Plan Subflow 1
BOM 最 高 层 已 Yes 需求计划成功 (回到主流
经计划了吗?
程)
No
A Starting-point A
交叉Ye参s 照供应吗?
用交叉参照供应满 足需求
Jump from here to
A starting-point A on
this page
用BOM最低层次的子项开始向前推.
同页联结器.去到指明位置
流程的开始点.它是从前一页的继续 开始参考点,从同页连接器或离页连 接器 .
选择了所有BOM的制造 物料是停止时间界限吗?
是
拉子流程
"计划传递 B" (从完成日期拉且 忽视时间界限)
跳到拉子流程1 (4页) , 然后返回
如果需求上拉订单,就从 需求日期拉,而不是完成 日期.
不
No
物料的无限Y字es段选择了吗?
计划需求在当前日 期作为可用
No 是转移物料?
Yes
计划模式 =全局?
Yes
No
Pull 3
Jump from here to Pull Plan Subflow 3 (p. 6)
No
Pull 3-A
Jump from here to Pull Plan Subflow 3, starting-point A (p. 6)
励磁系统控制流程图
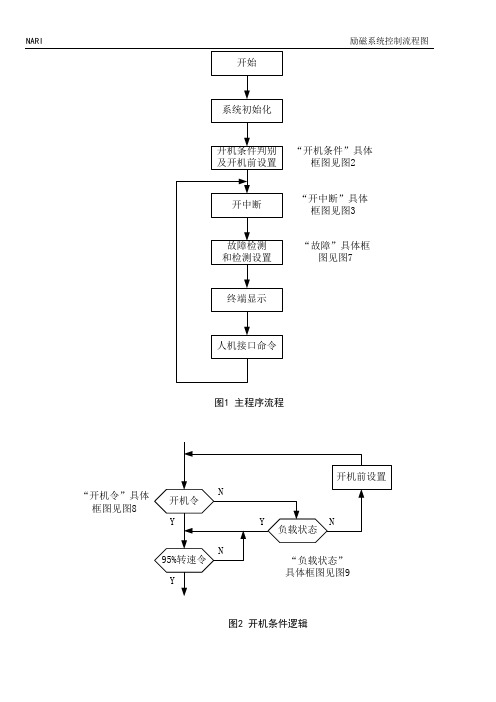
图1 主程序流程
“开机条件”具体
框图见图2
“开中断”具体
框图见图3
“故障”具体框
图见图7
图2 开机条件逻辑
“开机令”具体框图见图8
图3 控制调节程序流程
“负载状态”具体框图见图9
“空载逆变”具体框图见图12
图4 欠励限制判别的流程
图5 过励限制判别的流程
图6 强励限制判别的流程
图7 故障
图8 开机令
图9 负载状态
break_mark =0开关分,并且break_ld_err =0(电压小于80%,电流小于10%)为空载
break_mark=1开关合,并且break_nld_err=1为空载
图10 电压调节流程
“调差计算”具体框图见图11
图11 调差计算流程
图12 空载逆变条件(停机)
设计:日期:批准:日期:。
31 精通PID工艺流程图,要点以及最关键点

精通PID工艺流程图,这些要点最关键!PID图作为化工生产的技术核心,无论是设计院的工程师、化工厂的工艺员,还是中控控制室的主操,了解PID图上每一个字母、符号所表示的意义,并清楚明白这些元件的作用和控制方法,是作为化工人必不可少的技能。
PID图是什么?工艺流程图:即Process Flow Diagram,简称PFD,由工艺专业完成,它包含了整个装置的主要信息、操作条件(温度、压力、流量等)、物料衡算(各个物流点的性质、流量、操作条件等都在物流表中表示出来)、热量衡算(热负荷等)、设计计算(设备的外形尺寸、传热面积、泵流量等)、主要控制点及控制方案等。
相同作用且规格相同的设备只需画出一台即可。
工艺管道及仪表流程图:即Piping Instriment Diagram,简称PID。
PID是在PFD的基础上,由工艺、管道安装和自控等专业共同完成。
需要画出所有的设备、仪表、管道及其规格、保温厚度等内容,是绘制管道布置图的主要依据。
PID图是在工艺包阶段就开始形成初版,随着设计阶段的深入,不断补充完善深化,它分阶段和版次分别发表。
PID各个版次的发表,表明了工程设计进展情况,为工艺、自控、设备、电气、电讯、配管、管机、管材、设备布置和给排水等专业及时提供相应阶段的设计信息。
PID是基础设计和详细设计中主要成品之一,它反映的是工艺设计流程、设备设计、设备和管道布置设计、自控仪表设计的综合成果。
PID图能告诉我们什么?1.用规定的类别图形符号和文字代号:表示装置工艺过程的全部设备、机械和驱动机,包括需就位的备用设备和生产用的移动式设备,并进行编号和标注。
2.用规定的图形符号和文字代号:详细表示所需的全部管道、阀门、主要管件(包括临时管道、阀门和管件)、公用工程站和隔热等,并进行编号和标注。
3.用规定的图形符号和文字代号:表示全部检测、指示、控制功能仪表,包括一次性仪表和传感器,并进行编号和标注。
4.用规定的图形符号和文字代号:表示全部工艺分析取样点,并进行编号和标注。
三相异步电机的基本方程式讲解
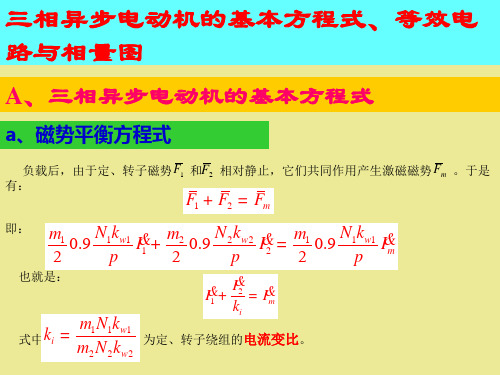
具体方法: 将三相异步电动机接到三相交流调压器上,电动机的转轴上不带任何机械负 UN 载,此时,转子转速 n » n1 , s » 0 。通过改变调压器的输出得U0 = (1.1~1.3) , P0 U0 U 0 、空载电流 I0 记录期间的定子电压 以及空载功率 。然后,逐渐降低 , = f (U0 ) (见图6.44)。 直至定子电流开始回升为止。绘出相应的空载特性: 、 I 0 P0
2 2 ¢ U P = P m I r = p + p 不变,于是, 0 之间必然为直线,如图6.45所示。 mec 与 Fe 0 0 1 0 1
图6.45
2 ¢ P = f ( U 0 0 )的关系曲线
由此可以将 p Fe 与 pmec 分离开来,然后再利用 U0 = U N 时的数值计算如下:
I2s = E2 s sE2 E2 = = = I2 r2 r2 + jx2s s r2 + jsx2s + jx2s s
(6-84)
上式左边各物理量的频率为转差频率 f 2 ,而右边各物理量的频率为定子频率 f1 (或 转子堵转时的情况)。由于两种频率下的电流有效值相等,因而折算前后相应的空间磁势 F2 保持不变。
结论: 频率折算相当于将旋转状态的转子绕组折算为堵转(或静止不动) 状态的转子绕组。折算后定、转子绕组的频率皆为 f1 。
m2 , N 2 k w 2
图6.38 三相异步电机经频率折算后的等效电路
转子机械轴上 总的机械输出 功率对应的等 效电阻
图6.38中,转子绕组的电阻
r2 s
被分成两项:
转子绕组本身 的电阻
复合海缆载流量计算方法研究与对比

复合海缆载流量计算方法研究与对比苏锦媚;唐永卫;陈元林【摘要】针对复合海缆载流量计算问题,对目前主流的载流量算法进行研究分析.介绍IEC60287标准、有限元法以及国际载流量计算软件CAMCAP三种方法的原理及求解过程.以某海上采油平台的三芯复合海缆项目为例,分别用三种方法求解海缆的载流量,并对结果进行相对误差分析.实验结果表明,三种算法的计算精度良好,均能被工程应用所接受.进一步结合算法本身的特点及其实现的成本指出,IEC60287适用于简单的电力系统,有限元法适用于复杂的电力系统,而CYMCAP可作为载流量学习与研究的参考工具.实际工程项目可依据电力系统的复杂度,选取最优的载流量计算方案.【期刊名称】《现代计算机(专业版)》【年(卷),期】2018(000)024【总页数】6页(P26-31)【关键词】复合海缆;载流量;IEC60287;有限元;ANSYS;CYMCAP【作者】苏锦媚;唐永卫;陈元林【作者单位】上海海事大学信息工程学院,上海 201306;江苏海上龙源风力发电有限公司,南通 226408;上海海事大学信息工程学院,上海 201306【正文语种】中文0 引言复合海缆是海底电力输送的重要载体,主要应用于海上采油平台、风电场以及海岛城市的电力输送,对海洋资源的开采以及海岛城市的发展有重要意义。
载流量是决定海缆电力输送能力的重要参数,也是对海缆运行状态进行评估的关键因素,准确地计算载流量,不仅能保证电力输送安全,还能充分利用海缆的负载裕度,提高经济效益。
目前,载流量计算方法主要包括解析法和数值法[1]。
解析法主要是指NM方法和IEC60287标准。
解析法根据IEC60287的方法和公式计算电缆的电阻、损耗及热阻等,最后根据导体温度推导载流量的计算公式。
数值法主要包括有限元法、有限差分法和边界元法等[2-3],其中有限元法在业界得到了广泛的应用[4-5]。
有限元法对电缆敷埋区域及边界进行网格划分,使用微分方程计算网格上若干点的温度,最后进行叠加,通过对温度场的分析求解载流量。