大疆精灵飞行训练
大疆精灵飞行训练
左杆向下+右杆左上
西北方向俯冲
左杆向下+右杆右上
东北方向俯冲
左杆向下+右杆左下
西南方向俯冲
左杆向下+右杆右下
东南方向俯冲
2、飞到20米之外,用APP自动返航。返航过程中使用摇杆继续控制。
3、飞到20米之外,遥控关闭,返航。
4、飞到20米之外,遥控关闭,返航。在返航过程中,开启遥控器,把S1开关拨到中间或者最下方,取消返航。
训练
训练内容
宽度:100m
周期:每个2次
【机头向前篇】
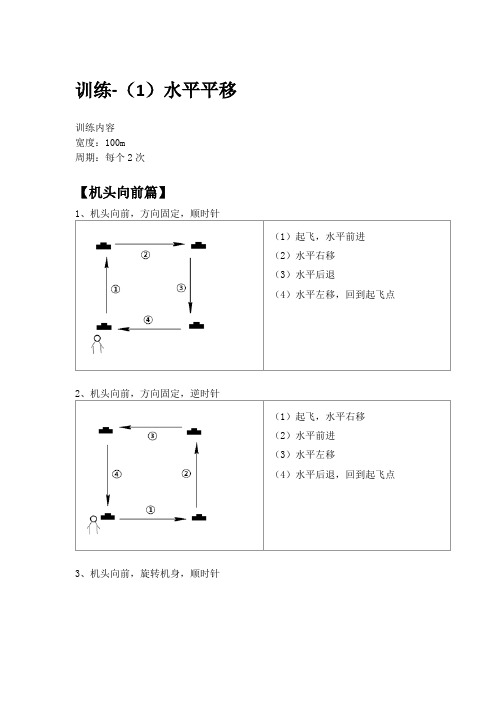
1、机头向前,方向固定,顺时针
(1)起飞,水平前进
(2)水平右移
(3)水平后退
(4)水平左移,回到起飞点
2、机头向前,方向固定,逆时针
(1)起飞,水平右移
(2)水平前进
(3)水平左移
(4)水平后退,回到起飞点
3、机头向前,旋转机身,顺时针
(1)起飞↑,水平前进
(1)机头向前起飞,旋转180°
(2)水平左移
(3)水平后退
(4)水平右移
(5)水平前进,回到起飞点
7、机头向后,旋转机身,顺时针
(1)机头向前起飞↑,旋转180° ↓
(2)水平后退↓
(3)右旋90°←水平后退
(4)右旋90°↑,水平后退
(5)右旋90°→,水平后退,回到起飞点
连贯动作8、机头向后,旋转机身,逆时针
(1)机头向前起飞↑,左旋90°←,水平后退
(2)左旋90°↓,水平后退
(3)左旋90°→,水平后退
(4)左旋90°↑,水平后退,回到起飞点
连贯动作:
机头向外逆时针环绕
左摇杆向左,右摇杆向后
大疆精灵飞行模式
精灵3遥控器篇:P、A、F三种飞行模式的详细说明:假如您想使用P模式以外的飞行模式,请按如下步骤操作:在APP相机界面中,找到“飞控参数设置”,选择“高级设置”,打开“允许切换飞行模式”,才能使遥控的模式切换生效;否则遥控器切换档位后,飞行器仍是默认的P模式;(一)P模式精灵3的P模式是最为常用的模式,表现比较安全稳定;P模式又分为P-GPS、P-OPTI和P-Atti三种模式,在遥控器切换到P档时,这三种模式根据条件不同自动进行切换,并不需要手动调整;P-GPSP-GPS模式在卫星数大于或等于6个时自动启用,此时飞行器可以实现空中准确悬停,而且卫星数越多,飞行器的悬停精度越高;假如飞行器高度低于3米,视觉定位系统满足工作条件,同时提供视觉定位和超声波增稳;因此,在P-GPS状态下,飞行器在水平和竖直方向都比较稳定;P-OPTI当飞行器接收不到卫星信号或卫星信号非常微弱,但飞行环境满足视觉定位条件时,飞行器将自动切换到P-OPTI模式,这一模式仅限于飞行高度三米以下时使用;超过3米高度,将为P-GPS或P-Atti模式;此时视觉定位和超声波模块使飞行器在水平和垂直方向比较稳定;注意:在室内飞行时,假如地面和光照不满足视觉定位条件,那么飞行器无法使用这个模式,将自动切换到P-Atti模式姿态模式;P-Atti当飞行器接收不到卫星信号或卫星信号非常微弱,飞行的地面也不满足视觉定位条件时,飞行器将自动切换到P-Atti模式,即姿态模式;在这一模式下飞行器仅能依靠气压计在竖直方向上相对稳定,而水平方向表现为自然漂移;因此P-Atti模式下,您需要手动调整飞行器的水平方向姿态,此时返航点无法成功记录;这个模式下飞行器漂移存在炸机风险,最好避免进入这一模式;建议新手在视矩内的近处使用飞行器,并且远离建筑或树木等障碍物,减少进入该模式的风险;二A模式A模式是半手动的姿态模式,在使用时飞行器的表现与P-Atti模式相同,飞行器在竖直方向比较稳定,水平方向表现为自然漂移;这一模式是手动选择不使用GPS模块,使飞行器不使用卫星信号增稳,与P-Atti的最大区别在于A模式是主动选择使用姿态模式,而P-Atti模式则是由于条件不足被迫进入姿态模式;这一区别也使A模式在卫星信号良好的情况下可以记录返航点,并实现准确返航;P-Atti模式由于是卫星信号不足被动进入的,所以无法记录返航点,也无法准确返航;三F模式F模式是高级应用模式;目前仅能使用F模式中的航向锁定功能;航向锁定功能是用于确定一个飞行坐标系,X轴正方向为水平向右,Y轴正方向为水平向前,当飞行器处于航向锁定状态时,无论机头朝向是哪边,飞行器对遥控信号的响应如下:控制飞行器向右飞行时,飞行方向与X轴正方向一致;控制飞行器向前飞行时,飞行方向与Y轴正方向一致;因此,航向锁定又称为无机头模式;航向锁定功能的开启办法如下:在飞控参数设置页面,找到高级功能选项,点击进入后选择允许切换飞行模式和允许航向锁定模式;请将遥控器切换到F档,飞行器的机头方向已经设为Y轴正方向,向右飞行的方向即为X轴正方向,坐标系确定不因机头旋转而改变;在高级功能选项中可重置坐标系的X和Y轴正方向;。
大疆航拍使用方法
大疆航拍使用方法
一、操作方法
1.开始飞行
在起飞前,确保遥控器操控杆位于 ARM 位置。
垂直向下按压飞行器右侧控制面板上的动力电池按键启动电机。
机头下方的电机旋转之后即可开始飞行。
在电池处于 cooldown 状态时,需要等待一段时间,以确保电池处于最佳工作状态。
2.遥控器操控
遥控器通过蓝牙与飞行器连接,每个遥控器都配有独立的通道。
将遥控器操作杆与飞行器绑定,操作杆上每个按键都有对应的控制功能,根据需要进行设置即可。
3.操控方式
通过遥控器上的操作杆来控制飞行器的升降、前后左右移动以及旋转等动作。
在飞行过程中,可以通过遥控器上的屏幕查看飞行器的实时状态,如电池电量、飞行高度、飞行速度等。
4.结束飞行
在需要结束飞行时,按下遥控器上的 return 键即可使飞行器降落到地面,然后关闭电机即可完成整个航拍过程。
二、注意事项
1.在飞行前需要确保安全,尽量避免在有电线、建筑、人群等地方进行飞行。
2.避免在禁飞区域进行飞行,以确保不会影响航空安全。
3.在进行航拍时需要注意周围的环境,如天气、风向等因素,以确保拍摄效
果和安全。
4.在使用遥控器时需要注意操作方式,避免误操作导致飞行器失控或损坏。
5.在飞行过程中需要注意飞行器的状态,如电池电量、飞行高度、飞行速度
等,以确保安全和拍摄效果。
航拍(大疆精灵三)教案

大疆精灵3产品概述(第一讲)教学目的:了解精灵3的功能亮点及组装。
教学内容:精灵3的功能亮点及组装教学重点:精灵3的组装教学课时:2课时教学过程:导入新课(略)一、简介Phantom 3 Professional飞行器,遥控器,云台相机以及配套使用的DJI Pilot App组成。
飞控系统集成于飞行器机身内,一体式云台位于机身下部,用户可通过安装于移动设备上的DJI Pilot App控制云台以及相机。
高清图传整合于机身内部,用于高清图像传输。
二、功能亮点Phantom 3 Professional 配备20mm (35 mm格式等效)低畸变广角相机和高精度防抖云台以及1200万像素图像传感器。
Phantom 3 Professional 可拍摄1200 万像素JPEG 以及无损RAW格式的照片。
在视频拍摄方面,Phantom 3 Professional最高规格可以拍摄4K每秒30帧超高清视频。
采用DJI领先的飞控系统,配合全新的智能电机驱动器,提供了敏捷、稳定、安全的飞行性能。
Phantom 3 Professional 配各视觉定位系统,可在超低空或室内实现稳定飞行和悬停。
返航功能可使飞行器失去遥控信号或电量不足时自动飞回返航点并自动降落。
遥控器内置全新一代Lightbridge 高清图传地面端,与飞行器机身内置的Lightbridge 机载端配合,可通过D JI Pilot APP 在移动设备上实时显示高清画面,在2千米内稳定传输720 P 图像以及上下行数据。
Phantom 3 Professional配备高达66 Wh 的高能量密度智能电池和高效率的动力系统,最大平飞速度16米/秒,最大续航时间约为23分钟。
三、组装飞行器准备飞行器1.按箭头方向移除云台锁扣。
2.安装4只螺旋桨,将带黑色浆帽的螺旋桨逆时针旋转安装到黑色螺纹的电机上,将带银色浆帽的螺旋桨顺时针安装到银色螺纹的电机上。
A 确保螺旋桨安装正确;手动拧紧每只螺旋桨,确保螺旋桨都安装稳固。
大疆精灵3专业版使用说明
大疆精灵3专业版使用说明一、组装飞行器与准备工作................................................................ 错误!未定义书签。
二、遥控器的使用.................................................................................. 错误!未定义书签。
三、DJI GO app界面 ............................................................................ 错误!未定义书签。
四、控制飞行器....................................................................................... 错误!未定义书签。
一、组装飞行器与准备工作1、云台锁扣的安装与拆卸拆卸时,按箭头方向移除云台锁扣,拍摄完毕后再按照下图位置安装云台锁扣,避免摄像头和云台因震动发生偏移现象。
2、螺旋桨的安装与拆卸黑色桨帽的螺旋桨应按照逆时针方向安装在黑色电机上,白色桨帽螺旋桨按照顺时针方向安装在白色电机上。
安装完毕后应检查螺旋桨是否都安装稳固。
3、智能电池的安装与拔出将电池以正确的方向推入电池仓,直到“咔”的一声,以确保电池卡紧在电池仓内。
如果电池没有卡紧,有可能导致电源接触不良,可能会影响飞行的安全性,甚至无法起飞。
在拔出电池时,应用手指紧按锁扣往外用力拔出,新机器可能会比较费力。
4、遥控器与移动设备的安装首先将遥控器的天线和移动设备支架展开,按下移动设备支架侧边的按键以伸展支架,放置移动设备后调整支架确保夹紧移动设备。
再使用USB数据线连接移动设备与遥控器后方的USB接口,打开DJI GO app。
二、遥控器的使用遥控器根据习惯方式分为美国手和日本手,可在DJI GO app内进行设置,大疆精灵3专业版的出场默认设置为美国手,也建议大家使用美国手。
大疆精灵3高级版(DJI Phantom 3 Advanced)用户手册

ADVANCED
用户手册 V1.0
2015.04
阅读提示
符号说明
禁止
重要注意事项
操作、使用提示
词汇解释、参考信息
使用建议
DJI 为 Phantom 3 Advanced 用户提供了教学视频和以下文档资料:
1.《物品清单》 2.《Phantom 3 Advanced 用户手册》 3.《Phantom 3 Advanced 快速入门指南》 4.《Phantom 3 Professional / Advanced 免责声明和安全操作指引》 5.《Phantom 3 Professional / Advanced 智能飞行电池安全使用指引》
2 1
3
7 © 2015 大疆创新 版权所有
Phantom 3 Advanced 用户手册
飞行器部件名称
[7] [6]
产 品 概 述
HD
[14]
遥控器部件名称
[8] [7] [6]
8 © 2015 大疆创新 版权所有
[1]
[2]
[1] GPS
[3]
[4]
[2] 螺旋桨
[3] 电机
[5]
12 © 2015 大疆创新 版权所有
Phantom 3 Advanced 用户手册
智能低电量返航 智能飞行电池电量过低时,没有足够的电量返航,此时用户应尽快降落飞行器,否则飞行器将 会直接坠落,导致飞行器损坏或者引发其它危险。为防止因电池电量不足而出现不必要的危险, Phantom 3 Advanced 主控将会根据飞行的位置信息,智能地判断当前电量是否充足。若当前 电量仅足够完成返航过程,DJI Pilot App 将提示用户是否需要执行返航。若用户在 10 秒内不 作选择,则 10 秒后飞行器将自动进入返航。返航过程中可短按遥控器智能返航按键取消返航 过程。智能电量返航在同一次飞行过程中仅出现一次。
大疆无人机培训内容

SCEPCO
RESTRICTED
Jan 2016
5
操作指南
•飞行计划
•确定巡查计划,明确飞行巡查任务内容; •检查并确认飞行器电池、遥控器电池、移动端电池电量均已经充满; •检查确认飞行器存储卡有PCO
RESTRICTED
Jan 2016
6
操作指南
•飞行前
•确认巡查起降点为指定的地点; •按照《无人飞行器飞行前检查清单 》内容进行飞行前的检查;
SCEPCO
RESTRICTED
Jan 2016
7
操作指南
•起飞
在P档模式下打开飞行器电源,等待约20秒 钟确认飞行器可否正常接收GPS信号。如 果GPS信号微弱或者缺失,禁止起飞,否 则飞行器将发生漂移,或导致坠机。
SCEPCO
RESTRICTED
Jan 2016
8
操作指南
•起飞
起飞后首先操纵飞行器飞到安全高 度,该高度已经在飞行路线表中列 出。 操纵摄像机镜头水平巡视观察周围 环境,检查周边有无明显高于飞行 器目前高度的障碍物,如果有,则 保持对飞行器与该障碍物相对位置 的观察,确保飞行安全。
SCEPCO
RESTRICTED
Jan 2016
11
操作指南
•起飞
飞行器将自动飞行到第一个航点,开始执行航点飞行任务。 调整摄像机镜头角度,使天地分界线消失在移动端屏幕上方,角度指示为 如图所示。
SCEPCO
RESTRICTED
Jan 2016
12
操作指南
•起飞
接近第一个航点时,设置飞行器为录像模式,启动录像功能。 当飞行器到达最后一个航点时,停止录像功能。
15
确保固件以及App已经更新至最新版本。固件升级、校准系统以及设定参 数时务必使飞行器远离人群或者动物。
无人机飞控训练计划

无人机飞控训练计划阶段 1: 入门。
了解无人机基本概念和术语。
在模拟器中练习基本操作(起飞、降落、悬停)。
学习安全规程和操作注意事项。
阶段 2: 基础飞行技能。
掌握无人机运动的控制(横滚、俯仰、偏航)。
练习基本的操纵技巧(例如悬停、转弯、直线飞行)。
提高空间感知能力和协调能力。
阶段 3: 进阶飞行技巧。
学习高级操纵技巧(例如翻滚、俯冲、筋斗)。
练习在不同环境中飞行(例如有风条件、窄小空间)。
了解不同无人机类型的特性和控制差异。
阶段 4: 实际应用。
应用无人机进行各种任务(例如航拍、货物运输、搜救)。
学习相关法律法规和操作限制。
培养对无人机操作的安全意识和责任感。
阶段 5: 持续改进。
定期练习和提升飞行技巧。
了解新的技术和行业趋势。
寻求有经验的飞行员指导或参与培训计划。
中文回答:无人机飞控训练计划。
阶段 1: 入门。
了解无人机基本知识和术语。
在模拟器中练习基本操作(起飞、降落、悬停)。
学习安全规程和操作注意事项。
阶段 2: 基础飞行技能。
掌握无人机运动的控制(横滚、俯仰、偏航)。
练习基本的操纵技巧(例如悬停、转弯、直线飞行)。
提高空间感知能力和协调能力。
阶段 3: 进阶飞行技巧。
学习高级操纵技巧(例如翻滚、俯冲、筋斗)。
练习在不同环境中飞行(例如有风条件、窄小空间)。
了解不同无人机类型的特性和控制差异。
阶段 4: 实际应用。
应用无人机进行各种任务(例如航拍、货物运输、搜救)。
学习相关法律法规和操作限制。
培养对无人机操作的安全意识和责任感。
阶段 5: 持续改进。
定期练习和提升飞行技巧。
了解新的技术和行业趋势。
寻求有经验的飞行员指导或参与培训计划。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
向前俯冲
左杆向下+右杆向下
向后俯冲
左杆向上+右杆左上
西北方向仰冲
左杆向上+右杆右上
东北方向仰冲
左杆向上+右杆左下
西南方向仰冲
左杆向上+右杆右下
东南方向仰冲
左杆向下+右杆左上
西北方向俯冲
左杆向下+右杆右上
东北方向俯冲
左杆向下+右杆左下
西南方向俯冲
左杆向下+右杆右下
东南方向俯冲
2、飞到 20 米之外,用 APP 自动返航。返航过程中使用摇杆继续控制。 3、飞到 20 米之外,遥控关闭,返航。 4、飞到 20 米之外,遥控关闭,返航。在返航过程中,开启遥控器,把 S1 开关 拨到中间或者最下方,取消返航。 5、A 模式、F 模式使用 6、相机的使用 连拍和定时拍摄怎么使用? 7、对组合推杆(单杆方向组合、双杆组合)的分析和验证 *左杆组合慎用,千万不能组合出双杆内八
3、机头向前,旋转机身,顺时针
(1)起飞↑,水平前进 (2)右旋 90°→,水平前进 (3)右旋 90°↓,水平前进 (4)右旋 90°←,水平前进,回到起 飞点
连贯动作: 机头向内顺时针环绕 左摇杆向左,右摇杆向前 后期训练注意旋转半径和旋转速度的控 制
4、机头向前,旋转机身,逆时针 (1)起飞,右旋 90°→,水平前进 (2)左旋 90°↑,水平前进 (3)左旋 90°←,水平前进 (4)左旋 90°↓,水平前进,回到起 飞点
连贯动作: 机头向外逆时针环绕 左摇杆向左,右摇杆向后
训练方案(2)水平斜线与立体斜线
飞行练习:单人航拍 18 招(完) 1、摇杆组合验证 摇杆操作 右杆左上 预期结果 水平左上飞行
右杆右上
水平右上飞行
右杆左下
水平左下飞行
右杆右下
水平右下飞行
左杆向上+右杆向上
向前仰冲
左杆向上+右杆向下
向后仰冲
左杆向下+右杆向上
连贯动作: 机头向内逆时针环绕 左摇杆向右,右摇杆向前 后期训练注意旋转半径和旋转速度的控 制
【机头向后篇】
5、机头向后,方向固定,顺时针 (1)机头向前起飞,旋转 180° (2)水平后退 (3)水平左移
(4)水平前进 (5)水平右移,回到起飞点
6、机头向后,方向固定,逆时针 (1)机头向前起飞,旋转 180° (2)水平左移 (3)水平后退 (4)水平右移 (5)水平前进,回到起飞点
左杆左上:左旋+上升=左旋直线上升 左杆右上:右旋+上升=左旋直线上升 左杆左下:左旋+下降=右旋直线下降 左杆右下:右旋+下降=右旋直线下降
7、机头向后,旋转机身,顺时针 (1)机头向前起飞↑,旋转 180° (2)水平后退↓ (3)右旋 90°←水平后退 (4)右旋 90°↑,水平后退 (5)右旋 90°→,水平后退,回到起 飞点 ↓
连贯动作: 机头向外顺时针环绕 左摇杆向右,右摇杆向后
8、机头向后,旋转机身,逆时针
(1)机头向前起飞↑,左旋 90°←, 水平后退 (2)左旋 90°↓,水平后退 (3)左旋 90°→,水平后退 (4)左旋 90°↑,水平后退,回到起 飞点
训练-(1)水平平移
训练内容 宽度:100m 周期:每个 2 次
【机头向前篇】
1、机头向前,方向固定,顺时针 (1)起飞,水平前进 (2)水平右移 (3)水平后退 (4)水平左移,回到起飞点
2、机头向前,方向固定,逆时针 (1)起飞,水平右移 (2)水平前进 (3)水平左移 (4)水平后退,回到起飞点