棘轮机构的几何尺寸计算公式
合集下载
机械设计基础第5章 间歇运动机构
6
图5.4 自行车小链轮中的内啮合棘轮机 1—轴;2—棘爪;3—小链轮
7
图5.5 有级变速棘轮机构 1—棘爪;2—齿罩;3—棘轮
8
图5.6 无级变速棘轮机构 1—棘爪;2—棘轮;3—制动棘爪
9
三、棘轮机构的设计 1)棘爪顺利进入棘轮齿槽的条件 如图5.7所示,棘爪与棘轮在A点接触,即将 进入齿槽,轮齿对棘爪作用有正压力N与摩擦力F (F=fN)。为了棘爪顺利进入齿槽,使棘爪滑入 齿槽的力矩NLtanα应大于阻止其滑入齿槽的力矩F L,即棘爪顺利进入棘轮齿槽的条件为: (2)棘轮机构的主要参数 1)棘轮齿数z 2)周节和模数 3)几何尺寸
16
三、槽轮机构的主要参数选择及几何尺寸计算 (1)槽轮机构的槽数z的选择 如图5.8所示,槽轮上分布的槽数z,当拨盘转 过角度2φ1时,则槽轮转过2φ2,两转角之间的关 系为: (2)圆销数目z′的选择
17
(3)几何尺寸计算 槽轮机构的中心距a可根据机械结构尺寸确定 。其余主要几何尺寸按表5.2给出的公式进行计算 。
13
图5.8 外接式槽轮机构 1—拨盘;2—槽轮
14
图5.9 内接式槽轮机构 1—拨盘;2—槽轮
15
二、槽轮机构的特点和应用 槽轮机构具有构造简单,制造容易,工作可靠 和机械效率高等特点。但不像棘轮机构那样具有超 越性能,也不能改变或调节从动轮的转动角度。由 于槽轮机构工作时,存在冲击,故不能运用于高速 的场合,其适用的范围受到一定的限制。当需要槽 轮停歇时间短,传动较平稳,机构外廓尺寸小和实 现同向传动时,可采用内接式槽轮机构。
10
图5.7 棘爪顺利进入棘轮齿槽的条件
11
表5.1 棘轮机构的主要几何尺寸
12
机械设计基础第5章

5.4 螺 旋 机 构
5.4.1 螺纹的参数、类型和应用 1.螺旋线、螺纹的形成 在直径为d2的圆柱面上,绕一底边长为πd2的 直角三角形,底边与圆柱体的底面重合,则斜边 在圆柱表面上将形成一条螺旋线,如图5.18(a) 所示。取一平面图形(如图5.18(b)所示),使其 一边与圆柱体的母线贴合,并沿螺旋线移动,移 动时保持此平面图形始终通过圆柱体的轴线,此 平面图形在空间形成的轨迹构成螺纹。
按从动件的间歇运动方式分类,它又有以下 几种形式。 (1) 单向间歇转动如图5.1、图5.2所示,从动 件均作单向间歇转动。 (2) 单向间歇移动如图5.3所示,当主动件1 往复摆动时,棘爪2推动棘齿条3作单向间 歇移动。 (3) 双动式棘轮机构如图5.4所示,主动摇杆 1上装有主动棘爪2和2′,摇杆1绕O1轴来回 摆动都能使棘轮3沿同一方向间歇转动,摇 杆往复摆动一次,棘轮间歇转动两次。
2. 棘轮机构的类型 根据工作原理,棘轮机构可分为齿式棘 轮机构和摩擦式棘轮机构两大类。 1) 齿式棘轮机构 齿式棘轮机构的工作原理为啮合原理。 按啮合方式分类,它有外啮合(如图5.1所示) 和内啮合(如图5.2所示)两种型式。内啮合棘 轮机构由轴1、驱动棘爪2与止回棘爪4、棘 轮3以及弹簧5组成。
2) 摩擦式棘轮机构 摩擦式棘轮机构的工作原理为摩擦原理。在 图5.6所示的机构中,当摇杆往复摆动时, 主动棘爪2靠摩擦力驱动棘轮3作逆时针单 向间歇转动,止回棘爪4靠摩擦力阻止棘轮 反转。由于棘轮的廓面是光滑的,所以又 称为无棘齿棘轮机构。该类机构棘轮的转 角可以无级调节,噪声小,但棘爪与棘轮 的接触面间容易发生相对滑动,故运动的 可靠性和准确性较差。
1. 间歇式送进 图5.8所示为浇注流水线的送进装置,棘轮与带轮固连 在同一根轴上,当活塞1在汽缸内往复移动时,输送带2间 歇移动,输送带静止时进行自动浇注。 2. 超越运动 图5.9所示为自行车后轴上的内啮合棘轮机构,飞轮1 即是内齿棘轮,它用滚动轴承支承在后轮轮毂2上,两者 可相对转动。轮毂2上铰接着两个棘爪4,棘爪用弹簧丝压 在棘轮的内齿上。当链轮比后轮转的快时(顺时针),棘轮 通过棘爪带动后轮同步转动,即脚蹬得快,后轮就转得快。 当链轮比后轮转的慢时,如自行车下坡或脚不蹬时,后轮 由于惯性仍按原转向转动,此时,棘爪4将沿棘轮齿背滑 过,后轮与飞轮脱开,从而实现了从动件转速超越主动件 转速的作用。按此原理工作的离合器称为超越离合器。
棘轮
超越离合器
JM
返回
运动特点: 运动特点: 轮齿式棘轮工作时噪音大且转角为步进可调,但运动准确。 轮齿式棘轮工作时噪音大且转角为步进可调,但运动准确。 而摩擦棘轮正好相反。 而摩擦棘轮正好相反。 应用:在各类机床中实现进给、转位、或分度。 应用:在各类机床中实现进给、转位、或分度。 实例:止动器、牛头刨床、冲床转位、 实例:止动器、牛头刨床、冲床转位、 超越离合器(单车飞轮)。 超越离合器(单车飞轮)。
第五十六讲 棘轮机构
一、棘轮机构的组成及其工作原理 棘轮机构的组成及其工作原理 组成:摆杆、棘爪、棘轮、止动爪。 组成:摆杆、棘爪、棘轮、止动爪。 工作原理:摆杆往复摆动,棘爪推动棘轮间歇转动。 工作原理:摆杆往复摆动,棘爪推动棘轮间歇转动。 优点:结构简单、制造方便、运动可靠、转角可调。 优点:结构简单、制造方便、运动可靠、 缺点:工作时有较大的冲击和噪音,运动精度较差。 缺点:工作时有较大的冲击和噪音,运动精度较差。 适用于速度较低和载荷不大的场合。 适用于速度较低和载荷不大的场合。 二、棘轮机构的类型与应用 按轮齿分布有: 外缘、 内缘、 端面棘轮机构 按轮齿分布有: 外缘、 内缘、 端面棘轮机构。 棘轮机构。 按工作方式有: 按工作方式有: 棘轮 类型 单动式、 双动式棘轮机构 单动式、 双动式棘轮机构。 棘轮机构。 单向、双向运动棘轮机构。 单向、双向运动棘轮机构。 棘轮机构 固定转角、 固定转角、可调转角 轮齿棘轮、 轮齿棘轮、 摩擦棘轮
C
冲压工位
D
冲头 卸料工位
间歇转动
B
装料工位
A
JM
返回
三、设计要点 正压力-Pn 正压力- 摩擦力-F 摩擦力-
L F M p r
要求在工作时,棘爪在Pn和F的作用下,能自动滑入棘轮齿槽。 的作用下,能自动滑入棘轮齿槽。 要求在工作时,棘爪在P 条件是两者对O’的力矩要满足 条件是两者对O’的力矩要满足 如下条件: 如下条件:
棘轮画法
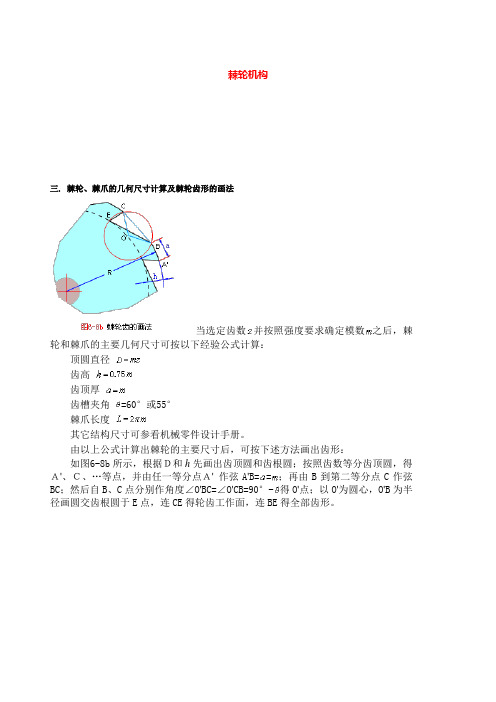
棘爪的几何尺寸计算及棘轮齿形的画法
当选定齿数 并按照强度要求确定模数 之后,棘 轮和棘爪的主要几何尺寸可按以下经验公式计算:
顶圆直径 齿高 齿顶厚 齿槽夹角 =60°或55° 棘爪长度 其它结构尺寸可参看机械零件设计手册。 由以上公式计算出棘轮的主要尺寸后,可按下述方法画出齿形: 如图6-8b 所示,根据D和 h 先画出齿顶圆和齿根圆;按照齿数等分齿顶圆,得 A'、C、…等点,并由任一等分点A' 作弦 A'B= = ;再由 B 到第二等分点 C 作弦 BC;然后自 B、C 点分别作角度∠O'BC=∠O'CB=90°- 得 O'点;以 O'为圆心,O'B 为半 径画圆交齿根圆于 E 点,连 CE 得轮齿工作面,连 BE 得全部齿形。
当选定齿数 并按照强度要求确定模数 之后,棘 轮和棘爪的主要几何尺寸可按以下经验公式计算:
顶圆直径 齿高 齿顶厚 齿槽夹角 =60°或55° 棘爪长度 其它结构尺寸可参看机械零件设计手册。 由以上公式计算出棘轮的主要尺寸后,可按下述方法画出齿形: 如图6-8b 所示,根据D和 h 先画出齿顶圆和齿根圆;按照齿数等分齿顶圆,得 A'、C、…等点,并由任一等分点A' 作弦 A'B= = ;再由 B 到第二等分点 C 作弦 BC;然后自 B、C 点分别作角度∠O'BC=∠O'CB=90°- 得 O'点;以 O'为圆心,O'B 为半 径画圆交齿根圆于 E 点,连 CE 得轮齿工作面,连 BE 得全部齿形。
棘轮
通常取α=20°
o1
棘爪对棘轮的总反力Pr的作用线在棘轮轴心O2和棘爪轴心O1之间穿过。
棘轮几何尺寸计算公式
齿槽角
棘轮参数 齿数z 模数m
计算公式或取值 12~25 1、1.5、2、2.5、3、 3.5、4、5、6、8、10
o2
L
p h1 h’ a1 a
60°~80°
顶圆直径da
齿间距p 齿高h 齿顶弦长a 棘爪工作面长度a1 齿偏角α 棘轮宽b 棘爪斜高h1 、齿斜高h’ 棘轮齿根圆角半径rf 棘爪尖端圆角半径r1
da =mz
P=π m h=0.75m a=m a1=(0.5~0.7)a α=20° b=(1~4)m h1=h’ ≈h/cosα rf =1.5 mm r1 =2 mm
da
α
o1
h
r1 rf
棘爪长度L
一般取 L=2p
棘轮转角大小的调整
(1)采用棘轮罩
通过改变棘轮罩的位置 实现棘轮转角大小的调 整
棘轮机构设计中的主要问题
棘轮机构的可靠工作条件: 欲使棘爪顺利的滑入棘轮齿根, 则必须有:
L F M p r
α Ft
A
Mpn>MF
将两个力分解成切向和径向分量
o2
Fr
α
pn
Σ =90° da
pt
Pn sinα L
∵ F= Pn f
> Fcosα L
α
齿偏角
代入得:
tgα> f =tgφ ∴ α>φ
棘轮转角大小的调整 (2)改变摆杆转角 通过改变滑块A的位置 ,改变摆杆转角的大小, 从而实现棘轮转角大小的 调整
棘轮机构的应用
牛头刨床
棘轮机构的应用
o1
棘爪对棘轮的总反力Pr的作用线在棘轮轴心O2和棘爪轴心O1之间穿过。
棘轮几何尺寸计算公式
齿槽角
棘轮参数 齿数z 模数m
计算公式或取值 12~25 1、1.5、2、2.5、3、 3.5、4、5、6、8、10
o2
L
p h1 h’ a1 a
60°~80°
顶圆直径da
齿间距p 齿高h 齿顶弦长a 棘爪工作面长度a1 齿偏角α 棘轮宽b 棘爪斜高h1 、齿斜高h’ 棘轮齿根圆角半径rf 棘爪尖端圆角半径r1
da =mz
P=π m h=0.75m a=m a1=(0.5~0.7)a α=20° b=(1~4)m h1=h’ ≈h/cosα rf =1.5 mm r1 =2 mm
da
α
o1
h
r1 rf
棘爪长度L
一般取 L=2p
棘轮转角大小的调整
(1)采用棘轮罩
通过改变棘轮罩的位置 实现棘轮转角大小的调 整
棘轮机构设计中的主要问题
棘轮机构的可靠工作条件: 欲使棘爪顺利的滑入棘轮齿根, 则必须有:
L F M p r
α Ft
A
Mpn>MF
将两个力分解成切向和径向分量
o2
Fr
α
pn
Σ =90° da
pt
Pn sinα L
∵ F= Pn f
> Fcosα L
α
齿偏角
代入得:
tgα> f =tgφ ∴ α>φ
棘轮转角大小的调整 (2)改变摆杆转角 通过改变滑块A的位置 ,改变摆杆转角的大小, 从而实现棘轮转角大小的 调整
棘轮机构的应用
牛头刨床
棘轮机构的应用
棘轮-文档资料
8
棘轮转角大小的调整 (2)改变摆杆转角
通过改变滑块A的位置 ,改变摆杆转角的大小, 从而实现棘轮转角大小的 调整
9
棘轮机构的应用
牛头刨床
10
棘轮机构的应用
超越离合器
11
12
单动式棘轮
13
双动式棘轮
14
内接棘轮
15
单动式可变转角
16
单动式可变向棘轮
17
棘轮的分类
外接棘轮
18
棘轮的分类
(1)棘轮齿数的选择
与齿轮相比,棘轮轮齿也用模数m 作为基本参 ,其计算公式为:
m=D/z 若设满足条件要求的棘轮最小转角为
Amin,则棘轮的齿距角
2π /z≤amin
即
z≧ 2π/amin
齿数太小可能不能保证最小转角的实现。
模数决定了齿的大小,应该根据齿和棘爪
的强度决定。
5
棘轮机构设计中的主要问题
12.1 棘轮机构
主讲人:汪鹏鹏 班级:机制113
1
一、棘轮机构:
主动件为摇杆做往复摆动,从动件棘轮做单向间歇转动。
优点:结构简单、制造方便、运动可靠、转角可调。 缺点:工作时有较大的冲击和噪音,运动精度较差。
适用于速度较低和载荷不大的场合。
2
棘轮机构的组成及工作原理 • 组成:
摇杆、驱动棘爪、棘轮、止回棘爪和机架。 • 工作原理:
6
棘轮几何尺寸计算公式
棘轮参数
计算公式或取值
齿数z
12~25
模数m
1、1.5、2、2.5、3、 3.5、4、5、6、8、10
顶圆直径da 齿间距p
da =mz P=πm
齿高h 齿顶弦长a 棘爪工作面长度a1 齿偏角α
棘轮转角大小的调整 (2)改变摆杆转角
通过改变滑块A的位置 ,改变摆杆转角的大小, 从而实现棘轮转角大小的 调整
9
棘轮机构的应用
牛头刨床
10
棘轮机构的应用
超越离合器
11
12
单动式棘轮
13
双动式棘轮
14
内接棘轮
15
单动式可变转角
16
单动式可变向棘轮
17
棘轮的分类
外接棘轮
18
棘轮的分类
(1)棘轮齿数的选择
与齿轮相比,棘轮轮齿也用模数m 作为基本参 ,其计算公式为:
m=D/z 若设满足条件要求的棘轮最小转角为
Amin,则棘轮的齿距角
2π /z≤amin
即
z≧ 2π/amin
齿数太小可能不能保证最小转角的实现。
模数决定了齿的大小,应该根据齿和棘爪
的强度决定。
5
棘轮机构设计中的主要问题
12.1 棘轮机构
主讲人:汪鹏鹏 班级:机制113
1
一、棘轮机构:
主动件为摇杆做往复摆动,从动件棘轮做单向间歇转动。
优点:结构简单、制造方便、运动可靠、转角可调。 缺点:工作时有较大的冲击和噪音,运动精度较差。
适用于速度较低和载荷不大的场合。
2
棘轮机构的组成及工作原理 • 组成:
摇杆、驱动棘爪、棘轮、止回棘爪和机架。 • 工作原理:
6
棘轮几何尺寸计算公式
棘轮参数
计算公式或取值
齿数z
12~25
模数m
1、1.5、2、2.5、3、 3.5、4、5、6、8、10
顶圆直径da 齿间距p
da =mz P=πm
齿高h 齿顶弦长a 棘爪工作面长度a1 齿偏角α
09、第四章之一、棘轮机构
三、棘轮机构的几何尺寸
1、自动啮紧条件 ——为保证棘轮机构的正常 工作,要求棘爪在工作载荷 下能自动滑到齿根而不被挤 出的条件称自动啮紧条件。 设棘爪与棘轮在齿顶圆上的A 点接触。则有: N.O2A.sinα>F. O2A.cosα ∵F=N.f=N.tanρ 代入得:tanα>tanρ ∴自动啮紧条件为:α>ρ 式中: α—棘轮齿面倾角; N—作用在棘爪齿面上的法向反力; F—作用在棘爪齿面上的摩擦力; f—摩擦系数 ρ—摩擦角
特点:齿式棘轮机构结构简 单,运动可靠,从动棘轮容 易实现有级调节,但是有噪 声、冲击,轮齿易摩损,高 速时尤其严重,常用于低速、 轻载的间歇传动。 应用举例: ⑴、送进和输送(如右图示) 牛头刨床的横向进给机构: 通过可变向棘轮机构使丝杆 产生间歇传动,从而带动工 作台(螺母)实现横向间歇 进给运动。
公式
小结:
一、棘轮机构是常用的间歇运动机构之一。分类如下:
二、棘轮机构的基本参数有: 齿数Z:圆周角与棘轮的最小转角之比。 模数m:棘轮顶圆与齿数之比。 有关计算公式参阅P54表4-1
布置作业:练习与思考
4-4-1、棘轮机构的工作原理是什么?
如图4-1示:摆杆3左右摆动,当摆杆3顺时针右摆时,棘 爪2插入棘轮1的齿内推动棘轮转过某一角度。当摆杆3逆 时针左摆时,棘爪2在棘轮1齿面上滑过,制动爪4—防止 棘轮反转,故棘轮静止不动。如此往复循环,将摇杆3的 往复摆动变为棘轮1的单向间歇运动。
可变向棘轮机构——用于双向的间歇运动。
如左图:改变棘爪的 位置,使棘轮变向。
如右图:提起棘爪绕轴线旋转 1800,使棘轮变向。
双动式棘轮机构——摆杆来回摆动,使棘轮向 同一方向运动。
二、棘轮机构的类型和特点
1、类型:
机械设计基础第6章间歇运动机构
双动棘轮机构
A
B
B’
洛阳高专用
棘轮可双向运动
可调转角的棘轮
φ
0 1 2 3 4 5
调滑动罩
牛头刨床进给调整机构 通过调整杆长来调摆角
洛阳高专用
1 2 3
摩擦棘轮
3 2 1
超越离合器
3 4 2
1
洛阳高专用
运动特点: 轮齿式棘轮工作时噪音大且转角为步进可调,但运动 准确。而摩擦棘轮正好相反。
应用:在各类机床中实现进给、转位、或分度。 实例:止动器、牛头刨床、冲床转
da =mz 与齿轮不同 P=πm
齿高h
齿顶弦长a 棘爪工作面长度a1
齿偏角α
h=0.75m
a=m a1=(0.5~0.7)a α=20°
棘轮宽b
b=(1~4)m
棘爪斜高h1 、齿斜高h’ 棘轮齿根圆角半径rf 棘爪尖端圆角半径r1
棘爪长度L
洛阳高专用
h1=h’ ≈h/cosα
rf =1.5 mm r1 =2 mm 一般取 L=2p
槽轮
弧接触时,槽轮静止;反之槽轮运动。
ω2
作用:将连续回转变换为间歇转动。
特点:结构简单、制造容易、工作可靠、机械效率高,
能平稳地、间歇地进行转位。因槽轮运动过程中角速
度有变化 ,不适合高速运动场合。
洛阳高专用
二、槽轮机构的类型与应用
槽轮 机构
外啮合槽轮机构 内啮合槽轮机构
轴线平行
类型 球面槽轮机构 轴线相交
k= n(1/2-1/z) ∵ k≤1 得:n≤2z/ (z -2)
提问:why k≤1? 事实上,当k=1时,槽轮机构已经不具备间歇运动特性了。
槽数z
3