前后制动器制动力分配 - 前后制动器制动力分配
制动系统计算说明书

制动器的计算分析整车参数2、制动器的计算分析前制动器制动力前制动器规格为ɸ310×100mm,铸造底板,采用无石棉摩擦片,制动调整臂臂长,气室有效面积。
当工作压力为P=6×105Pa时,前制动器产生的制动力:F1=2*A c*L/a*BF*ɳ*R/R e*P桥厂提供数据在P=6×105Pa时,单个制动器最大制动力为F1=3255kgf以上各式中:A c—气室有效面积L—调整臂长度a—凸轮基圆直径BF—制动器效能因数R—制动鼓半径R e—车轮滚动半径ɳ—制动系效率P—工作压力后制动器制动力后制动器规格为ɸ310×100mm,铸造底板,采用无石棉摩擦片,制动调整臂臂长,气室有效面积。
当工作压力为P=6×105Pa时,前制动器产生的制动力:F2=2*A c*L/a*BF*ɳ*R/R e*P桥厂提供数据在P=6×105Pa时,单个制动器最大制动力为F2 =3467kgf满载制动时的地面附着力满载制动时的地面附着力是地面能够提供给车轮的最大制动力,正常情况下制动气制动力大于地面附着力是判断整车制动力是否足够的一个标准。
地面附着力除了与整车参数有关之外,还与地面的附着系数有关,在正常的沥青路面上制动时,附着系数ϕ值一般在~之间,我们现在按照路面附着系数为来计算前后地面附着力:Fϕ前=G×ϕ+G×ϕ2满1=2200×+6000××=2002kgfFϕ后=G满2×ϕ-G×ϕ23800×××==1487kgf因为前面计算的前后制动器最大制动力分别为F1=3255kgfF2=3467kgf3、制动器热容量、比摩擦力的计算分析单个制动器的比能量耗散率的计算分析前制动器的衬片面积A1=2×πR1××L1=式中(L1=100mm摩擦片的宽度w1=110°)后制动器的衬片面积A2=2×πR2××L2=式中(L2=100m m 摩擦片的宽度w2=)比能量耗散率e1=β=e2=β=上式中:G—满载汽车总质量V1—制动初速度,计算时取V1=18m/sβ—满载制动力分配系数t—制动时间,计算时取t=鼓式制动器的比能量耗散率以不大于mm2为宜,故该制动器的比能量耗散率满足要求。
汽车理论第四章汽车的制动性

一、地面对前、后车轮的反作用力
图中忽略了汽车的滚动阻力偶矩、空气阻 力以及旋转质量减速时产生的惯性力偶矩。 下面的分析中还忽略制动时车轮边滚边滑 的过程,附着系数只取一个定值φ0。
对后轮接地点取力矩得
du Fz1L Gb m hg dt
对前轮接地点取力矩得
du Fz 2 L Ga m hg dt
1:理想的制动器制动力曲线
2:具有固定比值的制动器制动力曲线
3:地面制动力线
4:同步附着系数
5:制动过程分析
6:制动效率 7:前后制动器制动力的分配原则β
制动过程中,可能出现如下三种情况:
1:前轮先抱死拖滑,然后后轮抱死
2:后轮先抱死拖滑,然后前轮抱死
3:前、后轮同时抱死拖滑
其中,1是稳定情况;2是不稳定情况;3可 避免侧滑,同时只有在最大制动强度时才会失去 转向能力,同时附着条件利用较好。 所以,前、后制动器制动力分配的比例将影 响汽车制动时的方向稳定性和附着条件利用程度, 是设计汽车制动系统必须妥善处理的问题。
2 b 2 e
式中:
ub——0.8u0的车速(km/h);
u0 ——起始制动车速(km/h) ; ue ——0.1u0的车速(km/h) ; sb ——u0到ub车辆经过的距离(m); se ——u0到ue车辆经过的距离(m)。
二、制动距离的分析 驾驶员反应时间
1
' 1 ' 2
制动时汽车跑 偏的情形
a)制动跑偏 时轮胎在地面上留 下的印迹 b)制动跑偏 引起后轴轻微侧滑 时轮胎留在地面上 的印迹 b)
a)
制动跑偏时的受力图
一、汽车的制动跑偏 制动时汽车跑偏的原因有两个: 1)汽车左、右车轮,特别是前轴左、右车轮 (转向轮)制动器的制动力不相等。 2)制动时悬架导向杆系与转向系拉杆在运动 学上的不协调(互相干涉)。 二、制动时后轴侧滑与前轴转向能力的丧失 制动时发生侧滑,特别是后轴侧滑,将引起 汽车剧烈的回转运动,严重时可使汽车调头。
制动系统设计规范
一、国标要求1、GB 12676-1999《汽车制动系统结构、性能和试验方法》2、GB 13594-2003《机动车和挂车防抱制动性能和试验方法》3、GB 7258-1997《机动车运行安全技术条件》二、整车基本参数及样车制动系统主要参数整车基本参数样车制动系统主要参数三、计算1. 前、后制动器制动力分配1.1 地面对前、后车轮的法向反作用力公式:Fz1L Gb m duhgdt (1)duhgdt ………………………………(2)Fz2L Ga m参数:Fz1 ——地面对前轮的法向反作用力,N;Fz2 ——地面对后轮的法向反作用力,N;G——汽车重力,N;b——汽车质心至后轴中心线的水平距离,m;a ——汽车质心至前轴中心线的距离,m。
m——汽车质量,kg;hg——汽车质心高度,m;L——轴距,m;dudt——汽车减速度,m/s2四、制动器的结构方案分析制动器有摩擦式、液力式和电磁式等几种。
电磁式制动器虽有作用滞后小、易于连接且接头可靠等优点,但因成本高而只在一部分重型汽车上用来做车轮制动器或缓速器。
液力式制动器只用作缓速器。
目前广泛使用的仍为摩擦式制动器。
摩擦式制动器按摩擦副结构形式不同,分为鼓式、盘式和带式三种。
带式只用作中央制动器。
一、鼓式制动器鼓式制动器分为领从蹄式、双领蹄式、双向双领蹄式、双从蹄式、单向增力式、双向增力式等几种,见图la~f。
不同形式鼓式制动器的主要区别有:①蹄片固定支点的数量和位置不同。
②张开装置的形式与数量不同。
③制动时两块蹄片之间有无相互作用。
因蹄片的固定支点和张开力位置不同,使不同形式鼓式制动器的领、从蹄数量有差别,并使制动效能不同。
制动器在单位输入压力或力的作用下所输出的力或力矩,称为制动器效能。
在评比不同形式制动器的效能时,常用一种称为制动器效能因数的无因次指标。
制动器效能因数的定义为,在制动鼓或制动盘的作用半径R上所得到的摩擦力(M )与输入力F0之比,即K MF0R式中,K为制动器效能因数;M 为制动器输出的制动力矩。
理想的前后制动器制动力分配曲线
前后轮同时抱死的条件是:前、后轮制动器制动力之和等于附着
并且前后轮制动器制动力分别等于各
的附着力。即:Fu1 Fu2 mgFu1 Fz1Fu 2
Fz 2
带入上面的法向反作用力的公式得出:
Fu1 Fu 2
Fz1 Fz 2
L2 L1
g g
消去变量
得:Fu 2
1 2
G hg
b2
4hg L G
Fu1
谢
赏
谢观
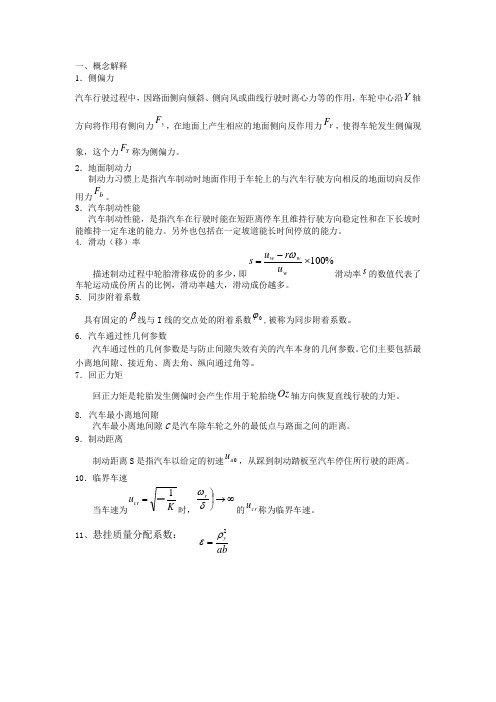
如图所示:L2为汽车质心至后轴
中心线的距离,L1为质心至前轴中
心线的距离,FZ 2 为地面对前轮的
法向反作用力,FZ1为地面对后轮
的法向反作用力,m为汽车质量,
hg 度
为质心高度,du dt
为汽车减速
对后轮取力矩得:
FZ1L
mgL2
m
du dt
hg
对前轮取力矩得:
FZ 2 L
mgL1
m
du dt
hg
前、后制动器制动力的比例关系
设计者:熊景坤、任哲明 设计班级:车辆1203 设计时间:2015年04月19日
本节要点
•地面对前后车轮的法向反作用力 •理想的前后制动器制动力分配曲线
地面对前后车轮的法向反作用力
左图是汽车在水平路面上制 动时的受力情况。图中忽略 空气阻力、滚动阻力以及旋 转质量减速时产生的惯性力 偶矩等。
Gb (
hg
2 Fu1 )
由
Fu 2
1 2
G hg
b2
4hg L G
Fu1
Gb (
hg
2 Fu1 )
此式画
成的曲线即为前后轮同时抱死时前后轮制动器 制
动力的关系曲线-理想的前后轮制动器制动力分配
04-5 前后制动力比例关系

hg G Fz 1 ( b L g F G ( a hg z2 L g
前半部分为静载,后半部分为动载。
du ) dt du ) dt
制动时,前轴载荷增加,后轴载荷减少。与du/dt 的值有关。du/dt ,转移量。转移量很大,不能 忽略。
湖北汽车工业学院汽车工程系
湖北汽车工业学院汽车工程系
HuBei Automotive Industries Institute Dep. of Automobile
同步附着系数
HBQY
0的选择应考虑的因素: a.常用道路和常用车速 若车速高、道路好, 0可高些; 反之低些 b. 轿车0大些,货车0小些 c. 平原地区0大些, 山区0小些
FP
湖北汽车工业学院汽车工程系
HuBei Automotive Industries Institute Dep. of Automobile
二、理想的前后制动器制动力分配曲线
HBQY
定义:当前后轮同时抱死时,前后制动器制动力 的分配关系。
在任一路面,前后轮同时抱死的条件为: 前、后车轮制动器制动力之和等于附着力; 前、后车轮制动器制动力分别等于各自的附 着力。
湖北汽车工业学院汽车工程系
HuBei Automotive Industries Institute Dep. of Automobile
G du Fj g dt
f线组
HBQY
FXb2
F xb 2
L hg
hg
Gb F xb1 hg
FXb1
F xb1 0, F xb 2
4-5 前、后制动器制动力的比例关系
HBQY
制动器的制动力足够时,可能出现: 1.前轮先抱死,然后后轮抱死; 2.后轮先抱死,然后前轮抱死; 3.前、后轮同时抱死拖滑。——“理想”
吉大汽车理论试题第2套答案
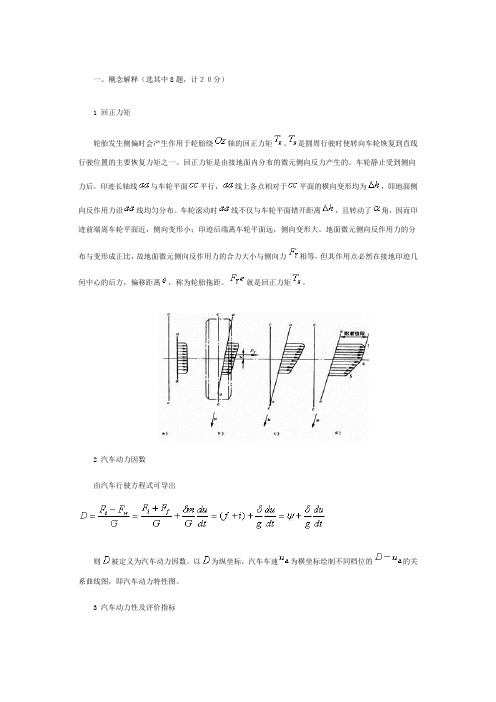
一、概念解释(选其中8题,计20分)1 回正力矩轮胎发生侧偏时会产生作用于轮胎绕轴的回正力矩。
是圆周行驶时使转向车轮恢复到直线行驶位置的主要恢复力矩之一。
回正力矩是由接地面内分布的微元侧向反力产生的。
车轮静止受到侧向力后,印迹长轴线与车轮平面平行,线上各点相对于平面的横向变形均为,即地面侧向反作用力沿线均匀分布。
车轮滚动时线不仅与车轮平面错开距离,且转动了角,因而印迹前端离车轮平面近,侧向变形小;印迹后端离车轮平面远,侧向变形大。
地面微元侧向反作用力的分布与变形成正比,故地面微元侧向反作用力的合力大小与侧向力相等,但其作用点必然在接地印迹几何中心的后方,偏移距离,称为轮胎拖距。
就是回正力矩。
2 汽车动力因数由汽车行驶方程式可导出则被定义为汽车动力因数。
以为纵坐标,汽车车速为横坐标绘制不同档位的的关系曲线图,即汽车动力特性图。
3 汽车动力性及评价指标汽车动力性,是指在良好、平直的路面上行驶时,汽车由所受到的纵向外力决定的、所能达到的平均行驶速度。
汽车动力性的好坏通常以汽车加速性、最高车速及最大爬坡度等项目作为评价指标。
动力性代表了汽车行驶可发挥的极限能力。
4 同步附着系数两轴汽车的前、后制动器制动力的比值一般为固定的常数。
通常用前制动器制动力对汽车总制动器制动力之比来表明分配比例,即制动器制动力分配系数。
它是前、后制动器制动力的实际分配线,简称为线。
线通过坐标原点,其斜率为。
具有固定的线与I线的交点处的附着系数,被称为同步附着系数,见下图。
它表示具有固定线的汽车只能在一种路面上实现前、后轮同时抱死。
同步附着系数是由汽车结构参数决定的,它是反应汽车制动性能的一个参数。
5 汽车通过性几何参数汽车通过性的几何参数是与防止间隙失效有关的汽车本身的几何参数。
它们主要包括最小离地间隙、接近角、离去角、纵向通过角等。
另外,汽车的最小转弯直径和内轮差、转弯通道圆及车轮半径也是汽车通过性的重要轮廓参数。
6 附着椭圆汽车运动时,在轮胎上常同时作用有侧向力与切向力。
汽车理论第五版习题集(附答案)
汽车理论第五版习题集一、填空题 1。
汽车动力性评价指标是: 汽车的最高时速 ﹑ 汽车的加速时间 和 汽车的最大爬坡速度 .2。
传动系功率损失可分为 机械损失 和 液力损失 两大类。
3. 汽车的行驶阻力主要有 滚动阻力 、 空气阻力 、 坡度阻力 和 加速阻力 _。
4. 汽车的空气阻力分为 压力阻力 和 摩擦阻力 两种。
5. 汽车所受的压力阻力分为 形状阻力 ﹑ 干扰阻力 ﹑ 内循环阻力 和 诱导阻力 。
6. 轿车以较高速度匀速行驶时,其行驶阻力主要是由_ 空气阻力 _引起,而_ 滚动阻力 相对来说较小.7. 常用 原地起步加速时间 加速时间和 超车加速时间 加速时间来表明汽车的加速能力。
8. 车轮半径可分为 自由半径 、 静力半径 和 滚动半径 .9。
汽车的最大爬坡度是指 I 档的最大爬坡度。
10.汽车的行驶方程式是_ j i w f t F F F F F +++= 。
11.汽车旋转质量换算系数δ主要与 飞轮的转动惯量 、__ 车轮的转动惯量 以及传动系统的转动比有关。
12。
汽车的质量分为平移质量和 旋转 质量两部分.13。
汽车重力沿坡道的分力成为 汽车坡度阻力 _。
14.汽车轮静止时,车轮中心至轮胎与道路接触面之间的距离称为 静力半径 。
15.车轮处于无载时的半径称为 自由半径 。
16。
汽车加速行驶时,需要克服本身质量加速运动的惯性力,该力称为 加速阻力 。
17。
坡度阻力与滚动阻力均与道路有关,故把两种阻力和在一起称为 道路阻力 。
18.地面对轮胎切向反作用力的极限值称为 附着力 。
19。
发动机功率克服常见阻力功率后的剩余功率称为 汽车的后备功率 。
20.汽车后备功率越大,汽车的动力性越 好 .21.汽车在水平道路上等速行驶时须克服来自地面的__ 滚动_阻力和来自空气的_ 空气 _阻力。
22.汽车的行驶阻力中,滚动阻力和空气阻力是在任何行驶条件下都存在的._ 坡度阻力和__加速阻力仅在一定行驶条件下存在.23.汽车直线行驶时受到的空气作用力在行驶方向上的分力称为空气阻力。
汽车运用工程3—7章习题答案
一、概念解释 1.侧偏力汽车行驶过程中,因路面侧向倾斜、侧向风或曲线行驶时离心力等的作用,车轮中心沿Y 轴方向将作用有侧向力yF ,在地面上产生相应的地面侧向反作用力Y F ,使得车轮发生侧偏现象,这个力Y F 称为侧偏力。
2.地面制动力制动力习惯上是指汽车制动时地面作用于车轮上的与汽车行驶方向相反的地面切向反作用力b F。
3.汽车制动性能汽车制动性能,是指汽车在行驶时能在短距离停车且维持行驶方向稳定性和在下长坡时能维持一定车速的能力。
另外也包括在一定坡道能长时间停放的能力。
4. 滑动(移)率描述制动过程中轮胎滑移成份的多少,即%100⨯-=www u r u s ω滑动率s 的数值代表了车轮运动成份所占的比例,滑动率越大,滑动成份越多。
5. 同步附着系数具有固定的β线与I 线的交点处的附着系数0ϕ,被称为同步附着系数。
6. 汽车通过性几何参数汽车通过性的几何参数是与防止间隙失效有关的汽车本身的几何参数。
它们主要包括最小离地间隙、接近角、离去角、纵向通过角等。
7.回正力矩回正力矩是轮胎发生侧偏时会产生作用于轮胎绕Oz 轴方向恢复直线行驶的力矩。
8. 汽车最小离地间隙汽车最小离地间隙C 是汽车除车轮之外的最低点与路面之间的距离。
9.制动距离制动距离S 是指汽车以给定的初速0a u ,从踩到制动踏板至汽车停住所行驶的距离。
10.临界车速当车速为K u cr 1-=时,∞→⎪⎭⎫δωr 的cr u 称为临界车速。
11、悬挂质量分配系数:aby 2ρε=简答题1. 用图叙述地面制动力、制动器制动力、附着力三者之间的关系。
① 当ϕF F xb ≤(ϕF 为地面附着力)时,μF F xb =;②当ϕF F xb =max 时μF F xb =,且地面制动力xbF 达到最大值maxxb F ,即ϕF F xb =max ;③当ϕμF F >时,ϕF F xb =,随着μF 的增加,xbF 不再增加。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第四章 汽车制动性第四节 制动力分配一、制动力分配要求根据制动稳定性的要求,前轮的附着率应大于后轮,即b1b2j j >,也就是说μ11μ22Z Z F F F F >制动方向稳定性的极限条件为:g g 210μ12g 1g g 1μ221g20Z Z Z Z h h l F mg zz F l h z F l l l h h l F F l h z F mg z z l l l +++====--- (4-16)式中:μ1F 、μ2F —前、后轮的理想制动力。
又由式(4-14),得:μ2μ1F F z mg mg=- (4-17) 当给定一个μ1F mg 值,即可从式(4-16)和(4-17)求出z 值和μ2F mg 值,这样就可得出如图4-16所示制动方向稳定性极限曲线。
制动力处于该曲线上时,可使车辆制动距离最短,是理想的前后制动器制动力分配曲线,称为I 线。
欧洲制动法规规定,轿车在0.150.8z ᆪᆪ范围内应满足b1b2j j >的要求。
只要车辆制动力分配处于I 线下方,就可保证前轮先抱死,使车辆处于制动稳定状态。
图4-16 稳定性界限(I 曲线)和最大制动距离界限为使制动距离不至于过长,上述法规又要求满足:p 0.10.85(0.2)z j ᆪ+- (4-18)因为在I 线下方,前轮先达到峰值附着率,这时前轴制动力为:21p ()g h l F mg z l lm j =+ (4-19)给定p j 值,即可从式(4-18)求出z 取值范围,由式(4-19)得到μ1F mg 的范围,随即从式(4-17)求得μ2F mg 的范围,这样可在图4-16上画出制动距离允许的极限曲线。
车辆前后轴制动力分配不得超越上述两条极限曲线。
对于前后轴制动力定比分配的车辆,有:μ2μμ2μ1F k F F=+;μ2μμ1μ1F k F mg k mg =- (4-20)式中:μk 为常数,是前后轴制动力的分配比。
按照欧洲制动法规,前后轴制动力分配比μk值的选取应保证式(4-20)决定的直线处于图4-17中的阴影区内。
越向阴影区上限靠拢,制动距离就越短;但在附着系数很高的干燥路面上会出现后轮先抱死的现象,导致制动行驶方向不稳定状态的发生。
如果采用折线式分配,即后轮的制动力在高减速率时增长减慢,这样可使分配向理想的前后轴制动力分配曲线(I线)靠拢(图4-18)。
图4-17 前后轴制动力定比分配的取值范围图4-18 前后轴制动力定比分配和折线分配二、 装载变化对制动性的影响除了某些载荷变化不大的特种车辆外,汽车装载的变化对制动性也有影响。
发动机前置,后部有行李舱的轿车,满载与空载相比,质心后移,而质心高度变化不大。
由式(4-16)可知,I线将要上移(图4-19),结果稳定区域扩大。
载货汽车装货后质心后移,同时质心高度增加。
一般载货汽车在载货后,I线还是上升的。
无论是轿车还是载货汽车,应以空载时的I 线来确定轴间制动力的分配。
这样以来,制动力分配曲线距离满载时的I 线较远。
当然,最佳方案是使轴上制动力与其动态轴荷成比例,即:gμ1110Z Z h F F F mg z lᆪ=+gμ2220Z Z h F F F mg zl ᆪ=-这就是说,不仅静态载荷的变化对制动性能有影响,而且减速时的轴荷转移也要影响制动效果。
图4-19 载荷变化的影响常用的解决方法是以车轴和车身之间的距离(一般只考虑后轴)作为调节前后轴制动器制动力分配的控制参数(在不平道路上行驶时,这个距离不能完全反映动态载荷的变化),图4-20上画出了定比式和折线式的感载比例装置对制动力分配的调节情况。
显然,这种装置可使前后轮制动力分配逼近I线,减少载荷情况的影响,从而可改善汽车不同装载时的制动性能。
图4-20 定比式和折射式的感载比例装置对制动力分配的调节a)定比式 ;b)折射式三、 双管路制动系统为提高汽车安全性,法规要求汽车必须装用双管路制动系统,以避免在一套制动管路失效时,整车完全丧失制动能力。
下面将简略分析四种双管路布置方案(图4-21)。
(1)“H”布置(图4-21a)。
对于这类制动系统,如果一轴制动失效,将使整车制动减速率下降,即使施加驻车制动也无法补救前轴制动力的丧失。
图4-21 双管路制动系统的各种布置(2)“X”布置(图4-21b)。
如果有一套回路失效,理论上整车制动减速率将降低50%(由于轿车制动总泵为串列式结构,实际减速率下降将远超过50%)。
因为一侧后轴无制动力,可承受侧向力,这时,为了避免两侧制动力不均而引起的跑偏,在轿车上可使前轮绕转向节主销的回转半径c (即前轮接地点在主销延长线与地面交点的内侧) 为负值,而在载货汽车上则应保持前轮回转半径为正值。
(3)在图4-21c)所示的布置时,无论哪一套回路失效,前轮制动力至少下降50%。
如果回路2失效,将导致后轮制动能力的丧失,而前轮制动力因制动总泵的结构所决定,制动力也将下降,不会发生车轮抱死失去转向的现象。
(4)图4-21d)所示布置。
一套回路失效,制动减速率至少减半。
除了某些载荷变化不大的特种车辆外,汽车装载的变化对制动性也有影响。
发动机前置,后部有行李舱的轿车,满载与空载相比,质心后移,而质心高度变化不大。
由式(4-16)可知,I 线将要上移(图4-19),结果稳定区域扩大。
载货汽车装货后质心后移,同时质心高度增加。
一般载货汽车在载货后,I 线还是上升的。
无论是轿车还是载货汽车,应以空载时的I 线来确定轴间制动力的分配。
这样以来,制动力分配曲线距离满载时的I 线较远。
当然,最佳方案是使轴上制动力与其动态轴荷成比例,即:gμ1110Z Z h F F F mg z lᆪ=+gμ2220Z Z h F F F mg zl ᆪ=-这就是说,不仅静态载荷的变化对制动性能有影响,而且减速时的轴荷转移也要影响制动效果。
图4-19 载荷变化的影响常用的解决方法是以车轴和车身之间的距离(一般只考虑后轴)作为调节前后轴制动器制动力分配的控制参数(在不平道路上行驶时,这个距离不能完全反映动态载荷的变化),图4-20上画出了定比式和折线式的感载比例装置对制动力分配的调节情况。
显然,这种装置可使前后轮制动力分配逼近I线,减少载荷情况的影响,从而可改善汽车不同装载时的制动性能。
图4-20 定比式和折射式的感载比例装置对制动力分配的调节a)定比式 ;b)折射式四、车轮抱死过程和制动防抱死系统这里,首先将讨论车轮由滚动到滑动的抱死过程,并介绍车轮防抱死系统(ABS)的概念。
车轮抱死过程是一个复杂的过程,其中涉及到车轮运动方程、轮胎附着率—滑移率曲线(及其在轮荷、速度等因素影响下的变化)、车轮制动力矩增长特性以及整车运动方程(考虑到悬架的弹性的影响)。
定性分析的假设如下:(1)因为抱死过程很短促,忽略车速的降低。
令sv ==&常数;(2)设车轮载荷Z F =常数;(3)轮胎附着率—滑移率特性按稳定曲线处理,并且简化为折线,对应于附着系数p j 的滑移率为c s ,见图4-22;图4-22 附着率-滑移率曲线的折线简化模型图4-23 线性增长的制动力矩(4)车轮制动力的摩擦力矩与时间成线性关系,如图4-23所示,μM Ct =-(C 为摩擦力矩增长率)。
经上述假设,可得到如图4-24所示的计算结果。
由图4-24可见,在滑移率为0-c s 的区间内,滑移率增加缓慢,车轮角速度缓慢降低到c w ;角减速度很快降低并稳定在c w &,属于稳定区域。
在c s -l 区间内,滑移率很快增加到1,角速度迅速降低下零,而角减速度急剧降低,属于不稳定区域。
由图4-24可知,角减速度c w&和时间t 两个参数对于ABS 十分重要。
(1)角减速度c w&。
在这个角减速度下,刚好达到附着系数p j ,并且防抱死装置应立即工作,减小车轮制动器的摩擦力矩。
c w&除了与轮荷Z F 和车轮半径r 相关外,还和三个因素有关:初始角速度0w 、附着率—滑移率曲线的斜率p c /s j 以及车轮制动器摩擦力矩增长率C 。
(2)时间t 。
在时间t 内,ABS 必须阻止车轮出现完全滑移。
t 主要与车速和角速度c w 有关,大概是百分之几到十分之几秒。
ABS 通过制动器摩擦力矩的降低、保持和增加以使车轮滑移率s 保持在c s 附近。
在制动过程中,滑移率s 是变化的(参看图4-25),因而附着率也在平均值上下变动,其平均值p j ej =。
因为j 不超过p j 值,所以e <1。
j 值波动幅度越小,e 值越趋于1,制动距离越短。
制动距离不是车辆制动性能的唯一指标,还要保持转向能力和弯道行驶的稳定性。
车轮除了制动力F μ之外,还必须承受侧向力Y F 。
从图4-26可看出,只有当c s s <时,才可能做到这一点。
由于控制调节的波动和转向能力的要求,e 值约为0.93。
这样,整车的max p /z j 也就在0.93左右。
这个指标对于折线制动力分配的车辆来说也不难达到,甚至还可高出。
所以,ABS 的主要功能是保持制动时稳定性和转向能力,而制动距离并不一定能缩短。
图4-26 带定值侧偏角α的车辆在曲线制动过程中的附着率和滑移率ABS 必须按照路面的不同附着系数快速匹配制动力。
比如在制动距离范围内,各个车轮所在路面可以是不同的(干燥、潮湿、冰面或压实雪地等)。
甚至同一个车轮经历的路面也可能是变化的。
为了防止传动系的振动,ABS 的制动力矩控制幅度要比较小。
制动踏板的回弹力要小,工作时的噪声也要控制。
ABS 的控制回路如图4-27所示。
控制回路的干扰包括:在制动过程中速度和载荷的变化引起的附着系数变化;路面不平度引起的轮胎和车桥振动;车轮制动鼓不圆度和制动滞后;轮胎圆周长的差异,如使用备胎;在驾驶员踩动踏板时引起的制动主缸压力输入的变化等。
下面通过图4-28来说明在高附着系数路面上的控制过程。
控制过程中应用的调节参数是车轮的切向加速度(或减速度)和滑移率。
车轮加速度(或减速度)信号是把轮速传感器传来的车轮位移信号通过电子控制单元(ECU )算出。
而滑移率信号无法直接获得,先借助ECU 逻辑电路由车轮切向速度构成一个基准速度,它和最优制动力时的车速接近;再通过比较车轮切向速度和基准图4-27 车轮防抱死装置控制回路1-压力调节阀;2-制动主缸;3-制动轮缸;4-电子控制器;5-轮速传感器图4-28 ABS 的控制过程(轿车、高附着率系数路面)速度得到滑移率信号。
当车轮切向加速度低于门限值(a-)时,制动压力调节阀进入保压方式,即阶段2。
如果车轮进一步减速,达到了滑移率门限值,制动压力调节阀切换到降压方式,即阶段3。
这时车轮切向加速度开始回升,在超过门限值(a-)后,制动压力又回到保压方式(阶段4)。