平面关节型机械手设计
平面关节机器人研制及其轨迹规划
2、圆弧插补
2、圆弧插补
圆弧插补则是通过连接多个圆弧段来生成机器人的运动轨迹。圆弧插补能够 实现更高精度的轨迹规划,并且可以轻松躲避障碍物。但是,圆弧插补的计算量 较大,需要更多的计算资源。 3.复杂曲线插补
2、圆弧插补
复杂曲线插补是通过连接多个复杂曲线段来生成机器人的运动轨迹。复杂曲 线插补具有极高的轨迹精度,能够适应各种复杂的环境和任务。但是,复杂曲线 插补的计算量和难度都较大,需要具有较高的编程技巧和算法能力。
制作原理
1、依据设计要求,准备材料和工具,包括铝合金、不锈钢、塑料等材料,以 及钻床、车床、铣床等工具。
制作原理
2、按照设计图纸,进行关节结构和机械臂的制作,包括切割、钻孔、铣削等 工艺。
3、安装关节驱动,包括电机、 编码器、控制器等。
4、调试机器人的运动轨迹和性 能,并进行优化。
实现方法
平面关节机器人研制及其轨迹 规划
01 引言
03 设计思路
目录
02
平面关节机器人的研 制
04 制作原理
05 实现方法
07 实例分析
目录
06 轨迹规划 08 结论
引言
引言
平面关节机器人是一种常见的机器人类型,其具有结构简单、易于控制和广 泛应用等优点。平面关节机器人通常由一系列连杆和关节组成,可以在一个平面 上进行运动。在工业、医疗、服务等领域,平面关节机器人都有广泛的应用前景。 本次演示将详细介绍平面关节机器人的研制过程及其轨迹规划方法。
轨迹规划
轨迹规划
轨迹规划是实现平面关节机器人高效运动的关键,本次演示介绍以下三种轨 迹规划方法:
1、直线插补
1、直线插补
直线插补是一种常见的轨迹规划方法,其通过连接起点和终点之间的直线段, 来生成机器人运动的轨迹。直线插补具有计算简单、控制方便等优点。但是,当 需要躲避障碍物或者需要更高精度的轨迹时,直线插补就难以满足要求了。
平面二关节机械人手设计

NO . 1 1
S C 下NC 〔 & 下 口干幻LOG Y IN「 MA 丁O N 〔 以飞 }
高新 技 术
平面二关节机械人手设计
周佳云
(绍兴文理学院机电系
浙江绍兴
1 3 2000 )
机器人灵巧手的重要组成部分驱动系统, 它的驱动系统由驱动器和传动系统两部分组 摘 要: 本文主要描述了平面二关节机械人手设计, 成 。 灵巧手存在的缺点以及解决方法。 关键词:平面二关节 机械人手 设计 文章编号: 1672一 3791(2007)04(b )一 0003一 1 0 文献标识码: A 中图 分类号:TP24 1 在2 世纪初, 1 随着自 动化加工设备的不断 更新和发展, 工业机器人正在逐渐代替某些领 域的加工。工业机器人手或操作器已应用于 工业生产中, 并逐步代替繁重的手工操作. 这些任务的自动化主要受多功能手爪或操作 工具开发的阻碍。传统的工业机器人末端夹 持器灵活性差、缺少感知能力和精确的力控 制等缺点, 多指机器人手的研究受到很多学者 的关注。多指手从结构与功能 上 模仿人手, 以实现对多种物体的灵巧操作和精确的力控 制, 因此具有解决一些复杂作业问题的可能 性。其主要应用范围有: 作为智能机器人的 手、危险环境下的精密操作及空间机器人技 术等川 。人手的灵 巧特性, 现已成为机器人学 者进行机器人手设计及实现其灵活制的思考 源泉。为了使机器人的末端操作器能象人手 一样对不同形状和不同性质的物体具有抓、 握、夹、拿等功能, 可以把人手的动作划分抓 型、握型和央型川。为了提高机器人的智能 化水平和作业水平, 越来越多的机器人学者对 多手指灵巧手感兴趣, 机器人多指灵巧手抓取 和操作的研究已经成为当今科技领域中一个 重要的研究主题!21。本文介绍平面二关节机 械人手设计, 机器人灵巧手的重要组成部分驱 动系统, 它的驱动系统由驱动器和传动系统两 部分组成。灵巧手存在的缺点以及解决方法。 1 驱动器 驱动系统是机器人灵巧手的重要组成部 分, 对系统的性能和操作能力具有决定性的作 用。在一般情况下, 灵巧手的驱动系统由驱动 器和传动系统两部分组成。驱动器是驱动系 统的核心部件, 用以产生运动和力, 传动系统 将运动和力从驱动器传递到灵巧手手指的关 节。灵巧手用驱动器的技术指标主要包括输 出力矩、速度、 质量、 体积、 可靠性、 控制性 能和功耗等。到目前 为止, 指灵巧手绝大多 多 数采用了电驱动, 部分采用了电液驱动、气压 驱动和形状记忆合金等驱动方式。
关节型搬运机械手设计

工业机械手是集机械、 电子、 控制、 计算机、 传感 器、 人工智能等多学科先进技术于一体的现代制造 业重要的自动化装备。自从 1962 年美国研制出世 界上第一台工业机械手以来 , 机械手技术及其产品 发展很快 , 已成为柔性制造系统( F M S) 、 自动化工厂
( FA) 、 计算机集成制造系统 ( CIMS) 的自动化工具。 连接手臂和末端执行器的部件, 其功能取决于自由 工业机械手作为现代制造业主要的自动化设备 , 已 度的多少, 自由度越多则其动作越灵活, 但随着自由 度的增多, 结构和控制也越复杂 , 在本次设计中 , 手 经广泛应用于汽车、 工程机械、 电子信息、 家电等各 腕应该具有两个自由度 , 即能实现手腕的回转和俯 个行业 , 进行焊接、 装配、 搬运、 加工等复杂作业。在 仰运动 ; 手臂结合了 P UM A 机械手结构并进行了改 日本、 欧美等国得到广泛的应用 , 我国的工业机械手 进, 臂部的结构形式需根据机械手的运动形式、 抓取 技术及其工程应用 的水平和国外 比还有一定的 距 重量、 运动自由度、 运动精度等因素来确定 , 为了实 离, 因此迫切需要解决产业化前期的关键技术, 对产 现伸缩运动的平稳和动作的精确, 采用了谐波减速 品进行全面规划 , 进行系列化、 通用化、 模块化设计 , 积极推进产业化进程 [ 1- 3] 。从近几年国外机械手推 出的产品来看, 机械手技术正在向智能化、 模块化和 系统化的方向发展, 其发展趋势主要为: 结构的模块 化和可重构化; 控制技术的开放化、 PC 化和网络化 ; 伺服驱动技术的数字化和分散化; 系统的网络化和 智能化等方面
第 8 卷第 6 期 2008 年 11 月
潍坊学院学报 Jo ur nal of Weifang U niv ersity
平面关节型机械臂设计说明书
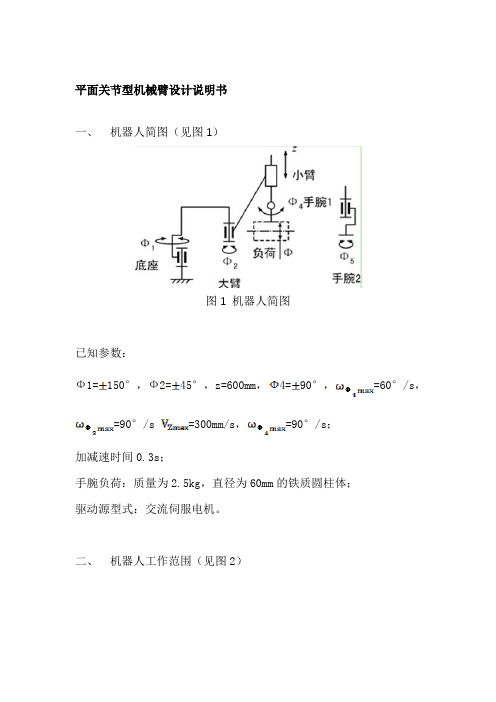
平面关节型机械臂设计说明书一、机器人简图(见图1)图1 机器人简图已知参数:Ф1=150°,Ф2=45°,z=600mm,4=90°,=60°/s,=90°/s =300mm/s,=90°/s;加减速时间0.3s;手腕负荷:质量为2.5kg,直径为60mm的铁质圆柱体;驱动源型式:交流伺服电机。
二、机器人工作范围(见图2)图2 机器人工作范围三、运动简图(见图3)图3 机器人运动简图该平面关节型机器人有以下几种运动结构形式:腰座转动机构: 布置在基座上的腰座安装在角接触球轴承上,电动机M1的轴与谐波发生器的中心轮连接,谐波发生器的刚轮与腰座固定部分联结,而谐波发生器的柔轮则与腰座的输出部分联接,当电机M1转动时带动腰座实现回转运动。
手臂转动机构: 布置在腰座上的大臂安装在角接触球轴承上,电动机M2的轴与谐波发生器的中心轮连接,谐波发生器的刚轮与大臂固定部分联结,而谐波发生器的柔轮则与大臂的输出部分联接,当电机M2转动时带动大臂实现回转运动。
手臂举升机构: 包括手腕机构在内的机体沿固定在上、下支承板中的两个导向柱可以上下移动。
在上支承板上装有电机基座,电机通过联轴器与滚珠丝杠相连,滚珠丝杠副的螺母紧固在手臂伸缩组件的机体上。
这样一来,电机M3的转动就变为手臂的上下往复移动。
手腕的俯仰及回转机构: 在手腕机构的机体前后装有电机M4及M5。
M4通过谐波减速器减速后,通过一组直齿齿轮及一组锥齿轮,将电机M4的转动变为手腕的俯仰运动。
电机M5经过谐波减速后,通过两组直齿齿轮传动,将电机M5的转动变为手腕的回转运动。
四、负载分析与结构设计计算1、腕部(见图4)图4 腕部传动简图传递路线:(1)关节4:电机M4—谐波减速器1—轴1—圆柱直齿轮Z1/Z2—轴5—带动手腕的回转运动Ф4(2)关节5:电机M5—谐波减速器2—轴2—圆柱直齿轮Z3/Z4—轴4—带动手腕上下俯仰运动Ф5A、由手腕负载求腕部驱动力矩:已知:手腕负载为M1=2.5kg的铁质圆柱体,且H=D=60mm,已知铁的密度ρ=7300kg/m3则:解得:H=D=75.8mm而(N.m)其中系数的值0.83-0.91.求回转关节驱动力矩T4:设其回转轴D5=60mm,腕部质量m2与负载m1相同均为2.5kg,则:求得=0.18N.m其中f——静摩擦系数其中,——偏心距=0.12N.m其中——腕载对关节4回转轴转动惯量2.求俯仰关节驱动力矩T5:设其回转轴D4=20mm,腕部质量m3与负载m1相同均为2.5kg,则=0.15 N.m则B、初选电机其中:——关节电机的额定功率K——安全系数,K=1.2-2——负载最大角速度对回转关节4:对回转关节5:初选选取电机M4与M5相同,型号为:MSMA系列(小惯量),其主要参数为:r/min联接键的选择:根据电机轴径,选择:键315(GB1096-79)C、总传动比及各级传动比确定:对回转关节4:=200 (4.10)取对俯仰关节5:(4.11)取D、谐波减速器的选型:1号谐波减速器的型号为杯型谐波减速器:CS-25A-200 i=200 m=0.7kg 2号谐波减速器的型号为杯型谐波减速器:CS-25A-100 i=100 m=0.7kgE、齿轮的选择1.直齿圆柱齿轮Z1、Z2:主动齿轮Z2,转速n1=20r/min,传动比为1,齿轮传动功率100w,选Z1、Z2材料为45调质。
平面关节型机械手设计设计专业论Word
江苏城市职业学院毕业设计(论文)( 2011 届)设计(论文)题目平面关节型机械手设计办学点(系)张家港办学点(工程系)专业机械设计与制造班级11机械(普)学号110404350532学生姓名邵强指导教师杜微娜职称助教摘要 (3)一、概论 (4)1、机械手的工作原理及设计思想 (4)2、机械手应用及应用中容易出现的误区 (5)3、机械手的发展及发展前景 (6)二、机械手的总体设计 (7)三、手指设计 (9)1、设计时应注意的问题 (10)2、零件的计算 (10)3、手指夹紧力的计算 (11)四、移动关节的设计计算 (12)1、驱动方式的比较 (12)2、汽缸的设计 (13)五、小臂的设计 (14)1、结构的设计 (14)2、轴的设计计算 (15)3、轴承摩擦力矩的计算 (15)4、驱动的选择 (16)六、大臂的设计 (16)1、结构的设计 (17)2、轴的设计计算 (17)3、轴承摩擦力矩的计算 (18)4、伺服系统的选择 (18)七、机身的设计 (17)1、设计时应注意的问题 (17)2、设计的效果说明 (18)结论 (20)致谢 (21)参考文献 (22)平面关节型机械手设计[摘要] 平面关节型机械手采用两个回转关节和一个移动关节;两个回转关节控制前后左右运动,而移动关节则实现上下运动,其工作空间如工作空间图,它的纵截面为矩形的回转体,纵截面高为移动关节的行程长,两回转关节转角的大小决定回转体截面的大小、形状。
关键词: 机械手轴承汽缸[Abstract] Selective Compliance Assembly Robot Arm have two slew joints andone move joints , two slew joints control the moving of the front and back l eft and right . the move joints control the moving of up and down . the wor k room as work room drawing . the vertical section is a rectangle slew . the high of the vertical section is move joints’journey ,the move angle of the two slew joints decide the big and small and figure of the vertical section .Key words: manipulator axletree cylinder一、机械手概论工业机械手是一种模仿人手部分动作,按照预先设定的程序,轨迹或其他要求,实现抓取、搬运工件或操作工具的自动化装置。
平面关节式教学机器人设计
平面关节式教学机器人设计毕业设计中文摘要本次设计的课题为平面关节式教学机器人,通过对平面关节式教学机器人的开发设计,为我学院选修课《机械手与机器人》提供一个可以直观感受关节坐标式机器人的教学工具,该设计完成后经过进一步的试验设计可以实现该课程的实践教学,丰富该课程的教学手段、提高教学水平。
本文主要对平面关节式机器人的结构进行了优化设计,包括机器人的底座、轴、大臂、小臂等零件进行了更加细致的设计,减轻了各个零件的质量,使结构尺寸设计的更加合理,对零件的各个部分进行了更加细致的分析和设计,同时考虑了实际装配的一些问题,对零件进行了合理的工艺处理,对需要配合的地方给出了合理的配合,使结构更加符合教学机器人结构简单、价格便宜、操作方便等特点。
关键词机器人教学关节 SCARA毕业设计外文摘要目录1 引言 (1)1.1研究背景及现状 (1)1.2课题研究的意义 (2)1.3SCARA机器人本体结构 (2)2SCARA型机器人臂结构的设计 (4)2.1 电机的设计计算 (4)2.2轴的设计 (5)2.2.1轴的材料选择 (5)2.2.2估计轴的最小直径 (5)2.2.3 轴的结构设计 (5)2.2.4轴的校核 (8)2.3SCARA型机器人的底座机构关键零件的设计 (9)2.4 大臂的结构设计 (11)2.5小臂的结构设计 (12)2.6SCARA型机器人大臂与小臂连接处关节设计 (13)2.7电机托设计 (14)2.8SCARA型机器人手腕的设计 (16)2.8.1 滚珠丝杠花键轴的选择 (18)2.8.2 同步带的选择 (21)3平面关节式教学机器人的总体装配图 (23)4润滑 (24)结束语 (25)致谢 (26)参考文献 (27)附录一设备使用说明书 (28)附录二三维装配图 (29)附录三外购件明细表 (30)1 引言SCARA机器人很类似人的手臂的运动,它包含肩关节、肘关节和腕关节来实现水平和垂直运动,在平面内进行定位和定向,是一种固定式的工业机器人。
平面关节型机器人结构设计

摘要平面关节型机械手采用两个回转关节和一个移动关节;两个回转关节控制前后左右运动,而移动关节则实现上下运动,它的纵截面为矩形的回转体,纵截面高为移动关节的行程长,两回转关节转角的大小决定回转体截面的大小、形状[11]。
能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
关键词:机械手,轴承,汽缸ABSTRACTSelective Compliance Assembly Robot Arm have two slew joints and one move joints ; two slew joints control the moving of the front and back left and right , the move joints control the moving of up and down , the vertical section is a rectangle slew , the high of the vertical section is move joints’ journey , the move angle of the two slew joints decide the big and small and figure of the vertical section .Mechanical hand, is also called from begins, auto hand can imitate the manpower and arm's certain holding function, with by presses the fixed routine to capture, the transporting thing 'OR' operation tool's automatic operation installment. It may replace person's strenuous labor to realize the production mechanization and the automation, can operate under the hostile environment protects the personal safety, thus widely applies in departments and so on machine manufacture, metallurgy, electron, light industry and atomic energy.Key words:manipulator, axletree , cylinder目录摘要 (I)ABSTRACT.................................................................................................... I I 第1章总体设计....................................................... 错误!未定义书签。
毕业设计(论文)-关节型机械手设计-圆柱坐标式(全套图纸)
1
Abstract
In this paper, the design of the joint-type robot using cylindrical coordinates of type, can be completed on the expected, inversion and other functions. Mainly by the manipulator hand, wrist, arm and body parts, etc., with rotating wrists, arms stretching, arm movements and arm rotation four degrees of freedom, able to meet the general requirements of the industry.
2.1.3 控制系统
有点动控制和连续控制两种方式。大多数用插销板进行点位程序控制,也有 采用可编程序控制器控制、微型计算机数字控制,采用凸轮、磁带磁盘、穿孔卡 等记录程序。主要控制的是坐标位置,并注意其加速度特征。
2.2 关节型机械手的主要技术参数
1.抓重: 300N
7
2.自由度: 4个
3.坐标形式:圆柱坐标
1 绪论
机械手是近几十年发展起来的一种高科技自动化生产设备。它的特点是可通 过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点, 尤其体现了人的智能和适应性。机械手作业的准确性和各种环境中完成作业的能 力,在国民经济各领域有着广阔的发展前景。
1.1 研究目的及意义
工业机械手具有许多人类无法比拟的优点,满足了社会化大生产的需要,其 主要优点如下:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
平面关节型机械手设计
设计任务书
一、通过设计平面关节型机械手,培养综合运用所学知识,分析问题和解决问题的能力。
有关资料:上下料搬运机械手,个自由度,平面关节型;需要搬运的工件:环类零件,内孔直径;高,厚,(只能从内孔夹持工件),材料钢,将工件从一条输送线搬运到与之平行的另一条输送线上,(两输送线距离为,高度差)。
要求:设计方案和计算正确,叙述清楚,图纸符合规范。
二、图纸:
.机械手机构简图
.工作空间投影图
.机械手传动原理图
.机械手装配图
.零件图
三、实习:
.本校机械实验室组装各类机械手模型。
.学习工业机械人设计方面知识。
五、进度:
月日到月日实习,拟订设计方案
月日到月日机械手传动原理图
月日到月日机械手装配图
月日到月日零件图
月日到月日写说明书
引言
平面关节型机械手是应用最广泛的机械手类型之一,既可以用于实际生产,又可以用于教学实验和科学研究。
用于实际生产,它能够满足装配作业内容改变频繁的要求;用于教学实验,它能够使人直观地了解机器人结构组成、动作原理等,所以开发设计和研究平面关节型机械手具有最广泛的实际意义和应用前景。
其中比较突出的是美国国家半导体公司生产的可编程全数字运动控制芯片,它具有位的位置、速度和加速度寄存器,内置算法,其参数可以修改;支持实时读取和设定速度、加速度以及位置等运动参数,内置的梯形图发生器能够自动生成速度曲线,平稳地加速、减速;支持增量式光电码盘的倍频输入;芯片的主频为和。
一机械手结构
本文设计的平面关节型机械手的实物照片如图所示,其主要包括两个旋转关节(分别控制机械大臂和小臂旋转以及手抓张合)和一个移动关节(控制手腕伸缩),图为机械手简化模型。
各关节均采用直流电机作为驱动装置,在机械大臂和小臂的旋转关节上还装配有增量式光电编码器,提供半闭环控制所需的反馈信号。
直流电机的运动控制采用自行开发的基于和构成的多关节控制卡,并编制了能满足运动控制要求的软件,实现对机械手的速度、位置以及关节联动控制。
由于机械手个关节电机的控制系统基本类似,因此在下文中,笔者将以单个关节电机为例向读者介绍平面关节型机械手的控制系统设计过程。