2014美国数学建模A题解题思路大全
历年美赛题目解法
历年美赛题目解法全文共四篇示例,供读者参考第一篇示例:历年美赛是美国工程建模大赛的简称,每年都会赛出许多优秀的选手和团队。
这项比赛主要是针对工程、数学和科学领域的学生,通过一个实际问题来展开建模和解答。
在历年美赛中,团队们面对的题目各不相同,有些题目会比较复杂,需要综合运用多门学科知识进行解答,而有些则相对简单,更注重创新和解决问题的方法。
在历年美赛题目中,有一些常见的解法和技巧可以帮助团队更好地应对挑战。
要充分理解问题,深入分析问题背景和要求,确保对题目的理解没有偏差。
要根据问题的特点和要求确定合适的数学模型,并运用各种数学方法和工具加以求解。
要善于利用计算机编程技巧来实现模型的建立和求解,以提高工作效率和准确性。
解题过程中,团队成员之间要密切合作,充分发挥各自的专长和优势,共同攻克问题。
在解答过程中,要及时调整思路和方法,灵活运用各种技巧和工具,以找到最优解。
在完成模型和解答后,要进行有效的分析和讨论,检查模型的合理性和稳定性,确保解答的准确性和可靠性。
在历年美赛题目中,有一些经典的解题思路和方法,被广泛应用于不同领域的问题中。
运用线性规划方法求解最优化问题,采用动态规划算法处理序列型问题,利用离散事件模拟技术模拟系统行为,通过随机过程分析系统性能等。
团队在解答问题时,可以参考这些经典方法,并根据实际情况进行创新和调整,以获得更好的结果。
在参加历年美赛的过程中,团队可以积累丰富的经验和知识,不断提高解题能力和创新意识。
通过与其他团队的交流和比赛,也能够拓展视野,学习他人的优秀经验和做法。
在解题过程中,要保持耐心和坚持,不断克服困难和挑战,直至最终获得满意的解答。
在历年美赛题目解法中,关键的是全面理解问题,切实分析和建立数学模型,灵活应用各种方法和技巧,团队配合紧密,有效沟通和讨论,并不断实践和改进。
通过不断练习和磨炼,团队可以在历年美赛中取得优异的成绩,展现出自己的才华和实力。
希望各位参赛者能够在历年美赛中不断进步,取得更好的成绩,展现出自己的独特魅力和价值。
2014年美国大学生数学建模竞赛A题论文综述
数学建模综述2014年美国大学生数学建模竞赛A题论文综述我们小组精读两篇14年美赛A题论文,选择了其中一篇来进行学习,总结。
1、问题分析The Keep-Right-Except-To-Pass Rule除非超车否则靠右行驶的交通规则问题:建立数学模型来分析这条规则在低负荷和高负荷状态下的交通路况的表现。
这条规则在提升车流量的方面是否有效?如果不是,提出能够提升车流量、安全系数或其他因素的替代品(包括完全没有这种规律)并加以分析。
在一些国家,汽车靠左形式是常态,探讨你的解决方案是否稍作修改即可适用,或者需要一些额外的需要。
最后,以上规则依赖于人的判断,如果相同规则的交通运输完全在智能系统的控制下,无论是部分网络还是嵌入使用的车辆的设计,在何种程度上会修改你前面的结果论文:基于元胞自动机和蒙特卡罗方法,我们建立一个模型来讨论“靠右行”规则的影响。
首先,我们打破汽车的运动过程和建立相应的子模型car-generation的流入模型,对于匀速行驶车辆,我们建立一个跟随模型,和超车模型。
然后我们设计规则来模拟车辆的运动模型。
我们进一步讨论我们的模型规则适应靠右的情况和,不受限制的情况, 和交通情况由智能控制系统的情况。
我们也设计一个道路的危险指数评价公式。
我们模拟双车道高速公路上交通(每个方向两个车道,一共四条车道),高速公路双向三车道(总共6车道)。
通过计算机和分析数据。
我们记录的平均速度,超车取代率、道路密度和危险指数和通过与不受规则限制的比较评估靠右行的性能。
我们利用不同的速度限制分析模型的敏感性和看到不同的限速的影响。
左手交通也进行了讨论。
根据我们的分析,我们提出一个新规则结合两个现有的规则(靠右的规则和无限制的规则)的智能系统来实现更好的的性能。
该论文在一开始并没有作过多分析,而是一针见血的提出了自己对于这个问题的做法。
由于题目给出的背景只有一条交通规则,而且是题目很明确的提出让我们建立模型分析。
2014年美国大学生数学建模竞赛MCM A题二等奖
For office use only F1 ________________ F2 ________________ F3 ________________ F4 ________________
A
Simulations of a Multi-Lane Traffic Model Using Cellular Automata Concerning the Overtaking Effect
Summary
The prosperity of modern industrialized world is largely depend on today’s sophisticated road networks. The rapid growth of vehicle number often exceeds the capacity of existing road [1,2]. Thus the effective utilization of road capacity is indispensable in traffic flow control. Cellular automaton model (CA model) is an very practical model in stimulating traffic flow behavior. This paper aims at building a CA model for multi-lane traffic using right-most overtaking law. The first CA model is the well-known NaSch model[9] Knospe studied a two-lane model focus on the density dependence of lane changes[10,11]. A numerical approach is performed by Daoudia and Moussa to stimulate the 3-lane traffic flow[12]. Basing upon the previous done by [1,9,10,12], we put forward an extended CA model using right-most overtaking rule. By a detailed investigation on overtaking process, we obtain the least safe distance under different speed limits and traffic flow densities, due to the limitation of least safe distance, we put forward incentive and safety criteria of overtaking behavior for particles on different lanes in our CA model. Simulation of our model is performed for three-lane case, and the result shows that our right-most overtaking rule behaves asymmetrically such that the right-most lane firstly reach at the “critical density” where the traffic flow reaches its peak point. And despite the special behavior of our own model, our results indicate a robust behavior of traffic flow such that when traffic density is roughly 0.1, the traffic flow arrives at its peak value, and with an increase of particle density, the phase transition occurs such that the traffic jams and “stop-and-go” phenomena happens. This result is of significance in conducting the daily traffic flow in our real world. Keywords: traffic flow, cellular automaton, right-most overtaking, simulation
2014数学建模国赛A题
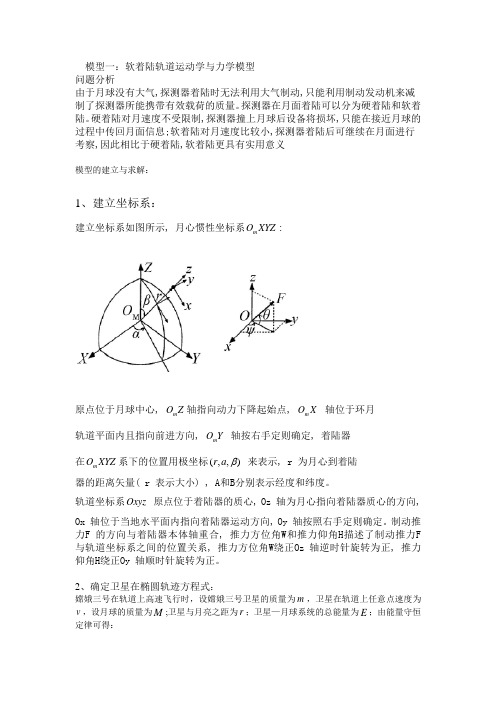
模型一:软着陆轨道运动学与力学模型问题分析由于月球没有大气,探测器着陆时无法利用大气制动,只能利用制动发动机来减制了探测器所能携带有效载荷的质量。
探测器在月面着陆可以分为硬着陆和软着陆。
硬着陆对月速度不受限制,探测器撞上月球后设备将损坏,只能在接近月球的过程中传回月面信息;软着陆对月速度比较小,探测器着陆后可继续在月面进行考察,因此相比于硬着陆,软着陆更具有实用意义模型的建立与求解:1、建立坐标系:建立坐标系如图所示, 月心惯性坐标系m O XYZ :原点位于月球中心, m O Z 轴指向动力下降起始点, m O X 轴位于环月 轨道平面内且指向前进方向, m O Y 轴按右手定则确定, 着陆器在m O XYZ 系下的位置用极坐标(,,)r a 来表示, r 为月心到着陆器的距离矢量( r 表示大小) , A 和B 分别表示经度和纬度。
轨道坐标系Oxyz 原点位于着陆器的质心, Oz 轴为月心指向着陆器质心的方向, Ox 轴位于当地水平面内指向着陆器运动方向, Oy 轴按照右手定则确定。
制动推力F 的方向与着陆器本体轴重合, 推力方位角W 和推力仰角H 描述了制动推力F 与轨道坐标系之间的位置关系, 推力方位角W 绕正Oz 轴逆时针旋转为正, 推力仰角H 绕正Oy 轴顺时针旋转为正。
2、确定卫星在椭圆轨迹方程式:嫦娥三号在轨道上高速飞行时,设嫦娥三号卫星的质量为m ,卫星在轨道上任意点速度为v ,设月球的质量为M ;卫星与月亮之距为r ;卫星—月球系统的总能量为E ;由能量守恒定律可得:212GMm mv E r -=得:v =对于月球—卫星系统,当行星在椭圆轨迹上运动时,在卫星轨迹上有存在一点p ,月球中心和p 点的矢径为p r 该点的卫星速度为p v ,p r 与p v 之间的夹角为p β。
如果月球中心与卫星运动方向之间的垂直距离为b 。
sin p p b r β=;这个b 是卫星轨道为椭圆的短半轴;根据角动量守恒定律:sin sin p p p mvr mv r ββ=因为 sin p p b r β= 所以 sin p vr v b β= 即:sin p v b vr β=结合上述式子可以推出:sin β= (1) 式(1)为卫星椭圆轨道表达式;3、确定近月点的速度:开普勒第二定律:根据开普勒第二定律知:行星和太阳的连线在相等时间内扫过相等的面积;设近月点A 与远月点B 距离月球的距离为,A B L a c L a c =-=+,在近月点与远月点两点分别取极短的相等的时间,故有A B S S ∆=∆ 代入得:B B a c v v a c-=+ 卫星运动的总机械能等于其动能和引力势能之和,故当卫星分别经过A 、B 时的机械能为:222211()2211()22A A A A B B B B GMm GMm E mv mv L a cGMm GMm E mv mv L a c =+=--=+=--由于卫星在椭圆轨道上只受万有引力作用,所以遵循机械能守恒:A B E E =最后由椭圆方程可以求出:A B b v a c v =-=由于B v 大小为在100km 轨道上的速度,可以根据万有引力求出,即,A B v v 可以求出,其中1.73/A v km s =;它的方向为轨迹的切线方向;4、制动过程的力学与运动学分析:忽略其他星球对卫星的引力影响,则可以把嫦娥卫星的制动过程看成是一个类平抛运动;其中v 为平抛的初速度;设',F F 为万有引力和卫星的推力,S 为主减速区的竖直高度 由物理关系可以得出下列等式:'2'1()2()B BA mv F F s F F t mv l v t →→→→=++== (图)解得:728.4l km =再根据数学几何关系可以求出近月点与处在主减速区的着陆点的直线距离为746.46L km =设近着陆点与月点的坐标分别为'''(,,),(,,)x y z x y z 则可以列出下列等式L = (2)5、坐标系的转换设纬度α,经度β,海拔为h (米)月球上任意一点(,,)h αβ表示三维体系中的点(,,)x y z ,则:东经:(1737.01/1000)(cos )(sin )x h αβ≈+西经:(1737.01/1000)(cos )(sin(180))x h αβ≈++(1737.01/1000)(cos )(sin())y h αβ≈+北纬:(1737.01/1000)sin z h α≈+ 南纬:(1737.01/1000)sin(90)z h α≈++ 海拔计算时单位是米,,,x y z 单位是千米则着陆点(,,)x y z 为((1138.08,1173.58,579.23))近月点'''(,,)x y z 为(1752.013cos()sin(180),1752.013cos sin ,1752.013sin )αβαβα+ 综上所述,联立上述的式(1)和式(2),并且将所有已知的条件带入公式中,得到近月点的位置坐标为:'''1387.28470.281752.01x y z ⎧=⎪=⎨⎪=⎩所以容易求出远日点的位置坐标为: ''''''1452.49492.391834.37x y z ⎧=-⎪=⎨⎪=⎩;。
2014美赛A题翻译

不太明显影响的因素。是否这个规则能够有效提高交通流量?如果不能的话,建议和分析一些替代选择
(尽可能地包括一些完全不是这种类型的因素)以提高车流量,安全或者其他你认为重要的因素。
在一些国家驾车在右边行驶是规范,讨论你的方案是否稍作修改即可被转入,或者有一些额外的要
求需要。
最后,如上述的规则要基于人类判断的依赖性。如果同一道路上的车辆交通完全被智能系统控制,那
--部分道路网络被控制或该道路上的部分车辆被控制--到什么程度会影响你早前分析的结果?
在美国驾驶汽车行驶在右边是一种规则(是指在美国,中国,和一些其他国家除了英国,澳大利亚
和一些前英国殖民地,多车道高速公路经常使用的规则是要求驾驶者驾驶在最右边的车道除非他们
正在超车,在这种情况下他们离开右边一个车道,超车,然后回到正常的驾驶车道。建立并且分析
一个数学模型关于这个规则在轻型交通和重型交通(大流量交通和小流量交通)中的性能。你也许
美赛a题思路
美赛a题思路
美赛A题思路
美国大学生数学建模竞赛(USAMO)A题是一道关于四边形的问题,要求给出一个正方形ABCD,以及在正方形边上的4个点P,Q,R,S。
要求在这4个点上分别划出4个三角形,使得这4个三角形的外接圆的半径最小。
该题的解法应用了几何学中的相关定理,如三角形外接圆的半径和内接圆的半径之间的关系。
此外,还要考虑正方形ABCD的对称性,这样可以将原问题简化。
首先,我们可以将正方形ABCD平分成四个三角形,即ACD,ADB,BCS,CSA。
根据这4个三角形的特点可知,它们的外接圆必须通过正方形ABCD的4个顶点。
同时,由于三角形外接圆的半径和内接圆的半径之间的关系,我们可以确定每个三角形的外接圆的半径。
接下来,我们可以利用正方形ABCD的对称性,将原问题简化为另一个问题,即在正方形ABCD的四条边上,找出两个点,使得它们分别在四个三角形的外接圆上,且外接圆的半径最小。
在此基础上,我们可以利用斜率的概念,判断某一点在哪个三角形的外接圆上。
具体来说,我们可以计算正方形ABCD的4条边上的各点的斜率,与之前求出的每个三角
形外接圆的斜率进行比较,从而判断某一点在哪个三角形的外接圆上。
最后,我们可以通过对四条边上的点的排列组合,找出最优解,即得到4个三角形的外接圆的半径最小的情况。
以上就是美赛A题的思路。
解决该题,需要综合运用几何学、代数学中的相关定理,以及斜率的概念,最终求出最优解。
2014数学建模国赛A题教程

承诺书
我们仔细阅读了《全国大学生数学建模竞赛章程》和《全国大学生数学建模竞赛参 赛规则》(以下简称为“竞赛章程和参赛规则”,可从全国大学生数学建模竞赛网站下 载)。
我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网 上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。
在模型优化中,我们考虑了在桌面上均匀分布的力的情况,通过建立空间力系的平
衡模型,在临界条件下(桌子支撑腿受到指向桌内的摩擦力取最大值),由理论力学知
识推导出桌面上均匀分布的力 F 与 角、钢筋位置之间的函数式。计算得出桌子的稳定
性与钢筋位置无关,桌子在这种受力情况下的稳定性只与支撑腿与竖直方向的夹角有
2. 提出问题
(1). 给定长方形平板尺寸为 120 cm × 50 cm × 3 cm,每根木条宽 2.5 cm, 连接桌腿木条的钢筋固定在桌腿最外侧木条的中心位置,折叠后桌子的高度为 53 cm。 试建立模型描述此折叠桌的动态变化过程,在此基础上给出此折叠桌的设计加工参数 (例如,桌腿木条开槽的长度等)和桌脚边缘线的数学描述。
我们授权全国大学生数学建模竞赛组委会,可将我们的论文以任何形式进行公开展 示(包括进行网上公示,在书籍、期刊和其他媒体进行正式或非正式发表等)。
我们参赛选择的题号是(从 A/B/C/D 中选择一项填写):
B
我们的报名参赛队号为(8 位数字组成的编号):
27006025
所属学校(请填写完整的全名):
长安大学
二、 问题分析
(1).折叠桌以铰链连接,外形由直纹曲面构成。通过反复研究折叠桌的动态视频, 分析出折叠桌的运动特性,我们采用几何投影法,化三维运动为二维运动,简化模型。 同时,为了便于分析几何关系,我们仅对单组木条中最长与最短两根木条进行探究。并 通过 Solidwoks 软件绘画其几何关系图。根据各木条之间的连动原理推导出所有木条间 的关系,建立曲线参数方程表示折叠桌整体的动态变化过程。最后计算出折叠桌的设计 加工参数,并通过函数式和三维曲线图描述桌角边缘线。
2014年数学建模A题思路

1 根据万有引力公式 : ()22Mm
v G m R h
R h =++ 近月点:数据代入,得:
远月点:数据代入,得: 月球表面加速度:6
g a =地月 运动学公式:F ma = 式中,μ为月球引力常数,m 为嫦娥三号质量。
用,,,u v w 分别代表轨道坐标系中的速度分量。
sp E C I g =,sp I 为发动机的比推力,E g 为月球重力加速度常数。
x a :水平方向加速度
y a :竖直方向加速度
a :月球的引力加速度6
g a =
x F :推力的水平方向分力
y F :推力的竖直方向分力 m :嫦娥“三号”总质量
Q :嫦娥“三号”燃料的秒消耗率
t v :嫦娥“三号”在近月点的速度
S :嫦娥“三号”主减速段的水平位移
t :嫦娥“三号”主减速段时间。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
美国高速公路限速是多少?美国高速公路的限速一般在60至75英里之间,多数州规定不能超过限速100英里。
也就是说,你在限速75英里的美国高速公路上跑到85英里,一般不会遭到警察追击。
但再高上去,麻烦就来了,警车往往是在你毫无戒备的情况下出现的,那时候你根本不知道自己已经超速,更不知道自己已经成了某个警察的猎物。
1英里(mi.)=1760码=5280英尺=1.6093公里=3.2187市里=3.2187华里=1609.3米中国最高车速不得超过每小时120公里<<中华人民共和国道路交通安全法实施条例>> 第七十八条高速公路应当标明车道的行驶速度,最高车速不得超过每小时120公里,最低车速不得低于每小时60公里。
在高速公路上行驶的小型载客汽车最高车速不得超过每小时120公里,其他机动车不得超过每小时100公里,摩托车不得超过每小时80公里。
同方向有2条车道的,左侧车道的最低车速为每小时100公里;同方向有3条以上车道的,最左侧车道的最低车速为每小时110公里,中间车道的最低车速为每小时90公里。
道路限速标志标明的车速与上述车道行驶车速的规定不一致的,按照道路限速标志标明的车速行驶。
高速公路(简称为高速路或高速),一般是指双向2条车道以上、双向分隔行驶、完全控制出入口、提出交通流模型前,应当将实际的涉及到车道数目、最高时速限制、交通路口、机械故障、驾驶员反应能力等多种因素的实际问题理想化,以便于应用数学方法进行分析讨论。
此处所做的假设包括:a.车辆沿一条无限长单向车道运动;b.车辆在单向车道内只能朝一个方向运动;c.单向车道是全封闭的,即没有供车辆驶入或者驶出的岔路口;d.车辆相对于此序列中的其他车辆位置不发生改变,即没有抛锚或超车的情况。
基于上述的假设,对作匀速运动的恒定密度车流而言,交通流变量的函数关系为:q=P0 0 (4)式中,P。
为车辆运动时的恒定密度;。
为车辆做匀速运动的速度。
实际的非恒定密度和非匀速运动的交通流仍然满足上述关系,其函数表达式为:g( ,t)=P( ,£)口( ,£车辆守恒方程由基本的交通流变量中所做的假设可知车辆的总体数目不会因观测点、观测时间的变化而变化。
因此在单向车道的区间[a,b]内,车辆数目变化完全取决于在位置X=a处驶入的车辆及在位置x=b处驶出的车辆数目之差。
交通流模型将式(5)代人式(13)后,车辆守恒方程可以变形为:a£+’ (、ID,t,)=一0 (、14)式(14)给出p和的关系。
如果车流速度可知,则式(14)可以转化为关于密度P的偏微分方程,因此可用于预测车流密度的变化情况。
但是在实际应用中,车流的密度无法事先确定,因为对于各个具体车辆而言,影响其速度的因素很多,包括驾驶者的意图和判断,交通状况的变化,驾驶者的反应速度等。
如果要用数学模型的方法建构方程,则需对实际问题做进一步简化和假设。
与车辆守恒方程中影响速度的因素相关假设问题A:保持向右行驶除非要超车的交通规则在一些国家,汽车行驶在右边是规则,比如,美国,中国和其他大多数国家,除了英国,澳大利亚和一些前英国殖民地。
多车道高速公路经常使用一个规则,就是要求司机在最右边的车道驾驶,除非它们要超车。
超车就是他们开到左边的一个车道,超越,并恢复到原来的行驶车道。
(1)建立和分析一个数学模型来分析这一规则在车流量少和车流量大的不同时刻的表现。
不妨检查权衡交通流量和其安全性。
这些保持原车道或者被超车的速度限制(即限制最大速度和最小速度),或者其他的因素,可以不用考虑到问题中。
(2)这个规则,能有效地促进了更多的车流量吗?如果不能,提出并分析备选方案(之中最好不要用到题目中这类规则),能够促进更多的交通流量,安全性,或者你认为重要的其他因素。
(3)在一些国家,汽车行驶在左边是常态,讨论你的解决方案是否能够转用,仅仅是要一个简单的方向改变,或者需要额外的要求。
(4)最后,如上所述的规则依赖于人的判断为标准。
如果运输车辆在相同的道路上完全被处于一个智能系统(无论是部分路网或是嵌入设计到所有车辆里)的控制下,在何种程度上这会改变你刚才分析的结果?问题A:车辆右行在一些规定汽车靠右行驶的国家(即美国,中国和其他大多数国家,除了英国,澳大利亚和一些前英国殖民地),多车道的高速公路经常使用这样一条规则:要求司机开车时在最右侧车道行驶,除了在超车的情况下,他们应移动到左侧相邻的车道,超车,然后恢复到原来的行驶车道(即最右车道)。
建立和分析一个数学模型,来分析这一规则在轻型和重型交通中的性能(即车辆较少和交通较拥堵时)。
你可以研究交通流量和安全二者间的平衡,最高或最低车速限制的作用(即,过低或过高的车速限制),和/或其它在这个问题陈述中没有明确说明的影响因素。
这条规则能否有效地提升交通流量?如果不能,请分析并建议一个替代方案(可能和上述规则的类型完全不同),这个方案可以提升交通流量,安全性,和/或您认为重要的其他因素。
在规定汽车靠左行驶的国家,证明您的解决方案能否简单地改变方向就可应用在这些国家,或是否要考虑额外的要求最后,如上所述的规则依赖于人的行为标准(即人们是否遵守这样的交通规则)。
如果相同的交通情况完全在一个智能系统的控制之下——无论是道路网的部分或是行驶在道路上的车辆都嵌入了这个系统——在何种程度上,这会改变你刚才分析的结果?最简单的两车道直道左限速a 右限速b 导出两车道安全距离f(a) f(b)现在还没有找到比较好的单次超车模型,我的想法是把单次超车模型完善好,去思考单次超车对整个车辆流(分车道车辆流)的影响..然后再整体考虑有什么能用的模型么大家...还有包括限速薇薇(289938500) 12:02:55美国有的地方是六七条车道喵灬Moriarty(735080576) 12:02:54籽博ひろし(529075317) 12:02:59安全性怎么量化薇薇(289938500) 12:03:01怎么超车~~喵灬Moriarty(735080576) 12:03:05薇薇(289938500) 12:03:22这个是安全性评价吧?喵灬Moriarty(735080576) 12:03:27薇薇(289938500) 12:03:34这种规则怎么用数学语言来模拟呢~~喵灬Moriarty(735080576) 12:03:40嗯是的限速标准月下清风(1846987271) 12:03:55安全性怎么定性的衡量,有这样的定义不定量Nimo_Love_Nimo(1271594821) 12:04:40 怎样模拟这个规则呢喵灬Moriarty(735080576) 12:05:07薇薇(289938500) 12:05:17我也觉得这个是问题的核心~~喵灬Moriarty(735080576) 12:05:26 HIC人体头部伤害指数薇薇(289938500) 12:05:29@喵灬Moriarty 求论文名~~喵灬Moriarty(735080576) 12:07:04Noah(373301647) 12:07:42又跑题了- -薇薇(289938500) 12:07:54额。
回眸等原点(352284758) 12:07:54高速上没人啊薇薇(289938500) 12:08:00对对对,快来说问题的核心REBEL.(441623900) 12:08:10碰撞速度是啥= =我觉得不用管.。
薇薇(289938500) 12:08:11怎么来模拟这种超车行为团子少年@小憩(56135775) 12:08:59题目主要思想是规则的完善,以及规则对交通流的影响REBEL.(441623900) 12:09:35最简单的是瞬间从右车道跳到超车道.。
瞬间提速.。
超车过安全距离后瞬间降速.。
然后瞬间跳回原车道.。
喵灬Moriarty(735080576) 12:10:09问题A:除非超车否则靠右行驶的交通规则在一些汽车靠右行驶的国家(比如美国,中国等等),多车道的高速公路常常遵循以下原则:司机必须在最右侧驾驶,除非他们正在超车,超车时必须先移到左侧车道在超车后再返回。
建立数学模型来分析这条规则在低负荷和高负荷状态下的交通路况的表现。
你不妨考察一下流量和安全的权衡问题,车速过高过低的限制,或者这个问题陈述中可能出现的其他因素。
这条规则在提升车流量的方面是否有效?如果不是,提出能够提升车流量、安全系数或其他因素的替代品(包括完全没有这种规律)并加以分析。
在一些国家,汽车靠左形式是常态,探讨你的解决方案是否稍作修改即可适用,或者需要一些额外的需要。
最后,以上规则依赖于人的判断,如果相同规则的交通运输完全在智能系统的控制下,无论是部分网络还是嵌入使用的车辆的设计,在何种程度上会修改你前面的结果?A题:靠右行驶(出了超车时)的交通规则汽车靠右行驶时很多国家的交通规则(如美国,中国和大多数其他国家,除了英国,澳大利亚,和一些前英国殖民地),多车道的高速公路常常要求司机在最右边的车道开车,除非超车,在这种情况下他们移动一个车道的左侧,超车,并回到他们原来的车道。
建立并分析一个数学模型来探究这一规则在交通压力大或小的时候的性能。
你可能要分析交通流量和安全性之间的权衡,过高或过低的车速限制(即,太低或太高速度的限制),和/或其他造成这一问题的非显性的因素。
这条规则对促进交通是否有效?如果不是,创建和分析一种它的替代品(完全不包括这种规则),以便促进更大的交通流量,安全性,和/或其他你认为重要的因素。
在靠左行车国家,探究你的解决方案是否可以通过一个简单的改变方向(或附加额外的要求)继续奏效。
最后,以上交通规则依赖于人们共同的判断。
如果在同一车道的交通是完全在智能的控制下的——部分道路网络或者嵌入与所有车辆的设计都用这一道路——这种假设出现多大的程度后将改变你分析的结果。