自动控制原理实验五利用matlab绘制系统根轨迹
控制理论实验仿真—matlab
实验一 典型环节的MATLAB 仿真一、实验目的1.熟悉MATLAB 桌面和命令窗口,初步了解SIMULINK 功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、SIMULINK 的使用MATLAB 中SIMULINK 是一个用来对动态系统进行建模、仿真和分析的软件包。
利用SIMULINK 功能模块可以快速的建立控制系统的模型,进行仿真和调试。
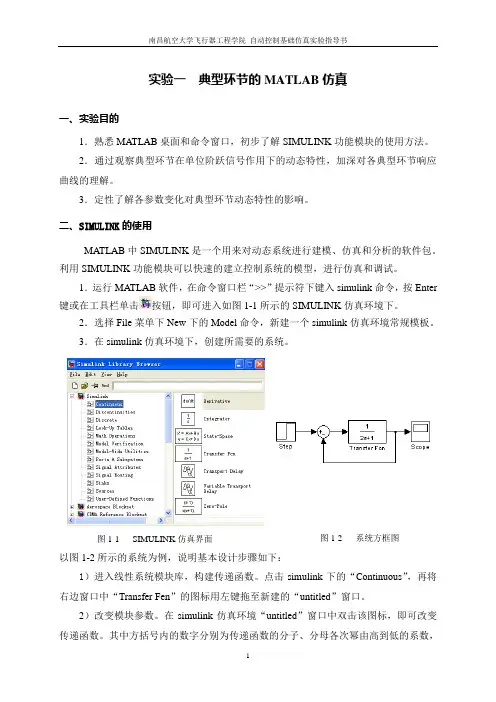
1.运行MATLAB 软件,在命令窗口栏“>>”提示符下键入simulink 命令,按Enter 键或在工具栏单击按钮,即可进入如图1-1所示的SIMULINK 仿真环境下。
2.选择File 菜单下New 下的Model 命令,新建一个simulink 仿真环境常规模板。
3.在simulink 仿真环境下,创建所需要的系统。
以图1-2所示的系统为例,说明基本设计步骤如下:1)进入线性系统模块库,构建传递函数。
点击simulink 下的“Continuous ”,再将右边窗口中“Transfer Fen ”的图标用左键拖至新建的“untitled ”窗口。
2)改变模块参数。
在simulink 仿真环境“untitled ”窗口中双击该图标,即可改变传递函数。
其中方括号内的数字分别为传递函数的分子、分母各次幂由高到低的系数,图1-1 SIMULINK 仿真界面 图1-2 系统方框图数字之间用空格隔开;设置完成后,选择OK ,即完成该模块的设置。
3)建立其它传递函数模块。
按照上述方法,在不同的simulink 的模块库中,建立系统所需的传递函数模块。
例:比例环节用“Math ”右边窗口“Gain ”的图标。
4)选取阶跃信号输入函数。
用鼠标点击simulink 下的“Source ”,将右边窗口中“Step ”图标用左键拖至新建的“untitled ”窗口,形成一个阶跃函数输入模块。
自动控制原理MATLAB仿真实验报告
实验一 MATLAB 及仿真实验(控制系统的时域分析)一、实验目的学习利用MATLAB 进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性; 二、预习要点1、 系统的典型响应有哪些2、 如何判断系统稳定性3、 系统的动态性能指标有哪些 三、实验方法(一) 四种典型响应1、 阶跃响应:阶跃响应常用格式:1、)(sys step ;其中sys 可以为连续系统,也可为离散系统。
2、),(Tn sys step ;表示时间范围0---Tn 。
3、),(T sys step ;表示时间范围向量T 指定。
4、),(T sys step Y =;可详细了解某段时间的输入、输出情况。
2、 脉冲响应:脉冲函数在数学上的精确定义:0,0)(1)(0〉==⎰∞t x f dx x f其拉氏变换为:)()()()(1)(s G s f s G s Y s f ===所以脉冲响应即为传函的反拉氏变换。
脉冲响应函数常用格式: ① )(sys impulse ; ②);,();,(T sys impulse Tn sys impulse③ ),(T sys impulse Y =(二) 分析系统稳定性 有以下三种方法:1、 利用pzmap 绘制连续系统的零极点图;2、 利用tf2zp 求出系统零极点;3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.四、实验内容 (一) 稳定性1. 系统传函为()27243645232345234+++++++++=s s s s s s s s s s G ,试判断其稳定性2. 用Matlab 求出253722)(2342++++++=s s s s s s s G 的极点。
%Matlab 计算程序num=[3 2 5 4 6];den=[1 3 4 2 7 2];G=tf(num,den);pzmap(G);p=roots(den)运行结果: p =+ - + -P ole-Zero MapReal AxisI m a g i n a r y A x i s-2-1.5-1-0.500.5-1.5-1-0.50.511.5图1-1 零极点分布图由计算结果可知,该系统的2个极点具有正实部,故系统不稳定。
利用MATLAB绘制系统根轨迹
利用MATLAB绘制系统根轨迹————————————————————————————————作者:————————————————————————————————日期:第4章 利用MATLAB 绘制系统根轨迹一、 利用MATLAB 绘制系统根轨迹相关知识假设闭环系统中的开环传递函数可以表示为:)()())(()())(()(021********s KG p s p s p s z s z s z s K den numK a s a s a s b b s b s K s G n m nn n n m m m m k =+⋅⋅⋅+++⋅⋅⋅++==++⋅⋅⋅++++⋅⋅⋅++=---- 则闭环特征方程为: 01=+dennumK特征方程的根随参数K 的变化而变化,即为闭环根轨迹。
控制系统工具箱中提供了rlocus()函数,可以用来绘制给定系统的根轨迹,它的调用格式有以下几种:rlocus(num ,den) rlocus(num ,den ,K) 或者 rlocus(G) rlocus(G ,K)以上给定命令可以在屏幕上画出根轨迹图,其中G 为开环系统G 0(s)的对象模型,K 为用户自己选择的增益向量。
如果用户不给出K 向量,则该命令函数会自动选择K 向量。
如果在函数调用中需要返回参数,则调用格式将引入左端变量。
如[R ,K]=rlocus(G)此时屏幕上不显示图形,而生成变量R 和K 。
R 为根轨迹各分支线上的点构成的复数矩阵,K 向量的每一个元素对应于R 矩阵中的一行。
若需要画出根轨迹,则需要采用以下命令:plot(R ,¹¹)plot()函数里引号内的部分用于选择所绘制曲线的类型,详细内容见表1。
控制系统工具箱中还有一个rlocfind()函数,该函数允许用户求取根轨迹上指定点处的开环增益值,并将该增益下所有的闭环极点显示出来。
这个函数的调用格式为:[K ,P]=rlocfind(G)这个函数运行后,图形窗口中会出现要求用户使用鼠标定位的提示,用户可以用鼠标左键点击所关心的根轨迹上的点。
实验六 基于MATLAB语言的控制系统根轨迹绘图1
>> >> >> >> >> >> >> >> >> mg pc wg wc
num=1; den=[0.01 0.4 1];bode(num,den); w=logspace(-1,1,100); bode(num,den,w); mag=1./((0.1^2*(i*w).^2)+0.4*(i*w)+1); l=20*log(abs(mag)); semilogx(w,l); grid margin(num,den) [mg,pc,wg,wc]=margin(num,den) =Inf =-180 =Inf =0
系统最大超调量 M p =1.17%时根轨迹增益 2.06 最大超调量 M p =1.17%时做时域仿真,如下图 >> num=[2.06 6.12];den=[1 4.06 6.18];step(num,den)
当系统无超调量时,取增益为 0.4,时域仿真如下图 >> num=[0.4 1.2];den=[1 2.4 1.2];step(num,den)
最大相位裕度时,Km=10
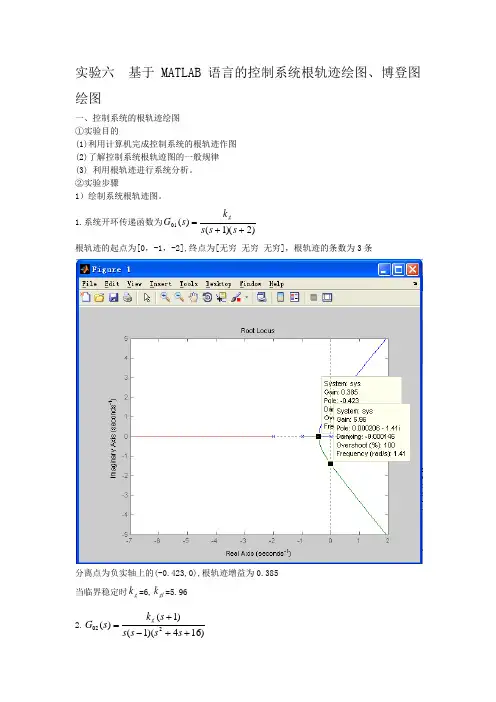
根轨迹的起点为[0,-1,-2],终点为[无穷 无穷 无穷],根轨迹的条数为 3 条
分离点为负实轴上的(-0.423,0),根轨迹增益为 0.385 当临界稳定时 k g =6, k gl =5.96 2. G02 ( s)
k g ( s 1) s( s 1)(s 2 4s 16)
程序如下: >>num=[1,1]; >> den=[1,3,12,-16,0]; >> rlocus(num,den); >> [k,r]=rlocfind(num,den); Select a point in the graphics window selected_point = -4.0403 - 0.1863i
参数根轨迹的matlab绘制原理
参数根轨迹的matlab绘制原理参数根轨迹是控制系统分析和设计中非常重要的概念,可以帮助我们分析控制系统的稳定性和动态响应特性。
在Matlab中,可以通过一些简单的指令实现参数根轨迹的绘制,从而更好地理解控制系统的行为。
本文将简要介绍参数根轨迹的概念和Matlab中绘制参数根轨迹的原理,以及具体的绘制方法。
一、什么是参数根轨迹?我们知道,在控制系统中,控制器的传递函数通常是由若干个参数构成的,例如比例控制器的传递函数为$K_p$,积分控制器的传递函数为$\frac{K_i}{s}$等。
参数根轨迹是指控制器参数变化时,系统极点和极点轨迹的变化关系。
在某些情况下,通过控制器参数的设计和调节,我们可以使得系统的极点轨迹穿过我们所期望的点(通常是一条直线),从而使系统的性能和稳定性得到改善。
参数根轨迹的绘制是一种基于控制理论的分析方法,它可以用来分析控制系统的动态响应特性,包括稳态误差、阻尼比、过渡过程时间等。
参数根轨迹的概念适用于各种类型的控制系统,包括比例控制、积分控制、微分控制、比例积分控制、比例微分控制等。
二、参数根轨迹的Matlab绘制原理Matlab提供了许多用于控制系统分析和设计的工具箱,包括控制系统工具箱、优化工具箱等。
在控制系统工具箱中,可以使用“rlocus”指令绘制参数根轨迹。
rlocus指令的使用形式为:```rlocus(num,den,k)```num和den是控制器的分子和分母系数向量,k是控制器参数的范围,通常选择在0到一个较大的数之间。
对于一个比例控制器,可以使用以下代码绘制参数根轨迹:```num=[1];den=[1 10];k=0:0.1:10;rlocus(num,den,k)```这个代码将绘制一个比例控制器$G(s)=k$的参数根轨迹,其中控制器的分母为$s+10$。
在绘制出来的图像中,可以看到参数$k$的变化对系统极点轨迹的影响。
通常我们会选择一个合适的$k$值,使得系统极点轨迹经过我们期望的稳定位置。
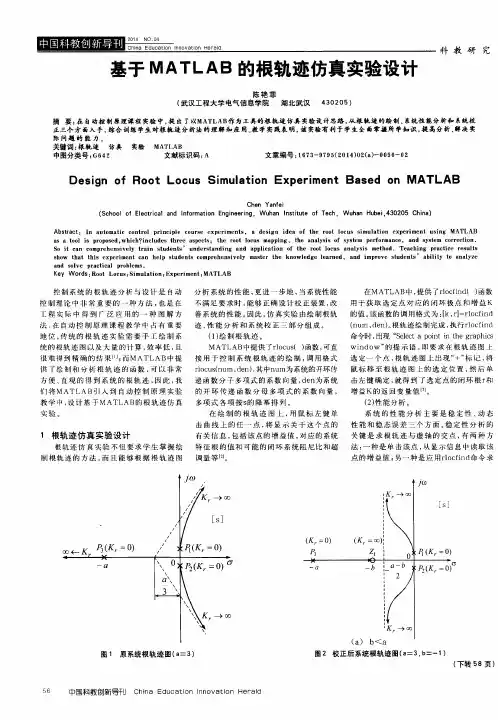
基于MATLAB的根轨迹仿真实验设计
Ab s t r a c t : I n a u t o ma t i c c o n t r o l p r i n c i p l e c o u r s e e x p e r i me n t s, a d e s i g n i d e a o f t h e r o o t l o c us s i mu l a t i o n e x p e r i me nt u s i n g MA T LA B
控制理论中非 常重要的 一种方法 , 也是 在 不 满 足 要 求 时 , 能够正确设计校正装置, 改 用 于 获 取 选 定 点 对 应 的 闭环 极 点 和 增 益 K 工 程 实 际 中 得 到 广 泛 应 用 的 一 种 图解 方 善 系 统 的 性 能 。 因此 , 仿 真 实 验 由 绘制 根 轨
a s a t o o l i S p r o p o s e d, wh i c h ?i n c l u d e s t hr e e a s p e c t s :t h e r o o t l o c u s ma p p i n g, t h e a n a l y s i s o f s y s t e m p e r f o r ma n c e, a n d s y s t e m c o r r e c t i o n.
MATLAB根轨迹绘制
摘要控制系统的计算机辅助设计从成为一门专门的学科以来已有20多年的历史,它一直受到控制界的普遍重视,在其发展过程中出现了各种各样的实用工具和理论成果。
本论文借助于国际上流行的控制系统计算机辅助设计软件MATLAB6.5对连续控制系统进行分析,首先,以自动控制原理为基础,对连续控制系统进行分析和设计,主要是系统的传函,零极点和状态空间表达式之间的转换;然后进行连续控制系统辅助设计及编程,包括系统的单位脉冲,单位阶跃,零输入和任意输入下的响应,还有系统的频率响应和特性的分析,如Nyquist图,Bode图,Nichols 图和根轨迹的绘制。
最后用GUI编制控制系统用户界面实现上述功能。
关键词:连续控制系统;系统模型;时域回应;频域回应;根轨迹;GUIAbstractControl the calculator assistance of system a design from become a specialized academics have already there is the history for more than 20 years, it has been subjected to a widespread value of control the boundary and appeared practical tool and theories result of various each kind in it the development the process.This disquisition uses the software named MATLAB 6.5 edition to analyses the continuous system. Firstly, it takes automatic control principle as foundation, and carry on analysis and design the continuous control system. It mainly contain Transfer function, the conversion of zero extremities and the appearance space expression types; Then carry on continuous control system assistance design and plait distance, include the unit pulse of system, the unit rank jump, zero importation with arbitrarily input next respond to, return systematic frequency to respond to with the analysis of the characteristic, like Nyquist diagram, Bode diagram, draw of Nichols diagram and root track. Finally draw up customer's interface of the control system to carry out the above-mentioned function with the GUI.Key words:continuous control system;system‟s model;time response;frequency response; root locus; GUI目录第1章连续控制系统的计算机辅助设计和分析的概述 (1)1.1 控制系统的数学模型与建立 (1)1.2 控制系统的模型转换 (4)第2章基于MATLAB的连续控制系统的设计与分析 (6)2.1 连续控制系统的时域分析 (6)2.2 连续控制系统的频域分析 (11)2.3 连续控制系统的根轨迹分析与设计 (16)第3章图形用户接口(GUI)制作 (25)3.1 图形用户接口的创建概述 (25)3.2 控制系统分析与设计的GUI (33)3.3 控制系统的综合分析与设计 (39)结论 (44)参考文献 (45)致谢 (46)第1章连续控制系统的计算机辅助设计和分析的概述1.1 控制系统的数学模型与建立控制理论分析,设计控制系统的第一步是建立实际系统的数学模型.所谓数学模型就是根据系统运动过程的物理,化学等规律,所写出的描述系统运动规律,特性,输出与输入关系的数学表达式。
自动控制原理MATLAB实验报告
实验一典型环节的MATLAB仿真一、实验目的1.熟悉MATLAB桌面和命令窗口,初步了解SIMULINK功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、实验原理1.比例环节的传递函数为KRKRRRZZsG200,1002)(211212==-=-=-=其对应的模拟电路及SIMULINK图形如图1所示。
2.惯性环节的传递函数为ufCKRKRsCRRRZZsG1,200,10012.021)(121121212===+-=+-=-=其对应的模拟电路及SIMULINK图形如图2所示。
图1 比例环节的模拟电路及SIMULINK图形图2惯性环节的模拟电路及SIMULINK图形3.积分环节(I)的传递函数为ufCKRssCRZZsG1,1001.011)(111112==-=-=-=其对应的模拟电路及SIMULINK图形如图3所示。
4.微分环节(D)的传递函数为ufCKRssCRZZsG10,100)(111112==-=-=-=ufCC01.012=<<其对应的模拟电路及SIMULINK图形如图4所示。
5.比例+微分环节(PD)的传递函数为)11.0()1()(111212+-=+-=-=ssCRRRZZsGufCCufCKRR01.010,10012121=<<===其对应的模拟电路及SIMULINK图形如图5所示。
图3 积分环节的模拟电路及及SIMULINK图形图4 微分环节的模拟电路及及SIMULINK图形6.比例+积分环节(PI)的传递函数为)11(1)(11212sRsCRZZsG+-=+-=-=ufCKRR10,100121===其对应的模拟电路及SIMULINK图形如图6所示。
三、实验内容按下列各典型环节的传递函数,建立相应的SIMULINK仿真模型,观察并记录其单位阶跃响应波形。
第4章 利用MATLAB绘制体系根轨迹
增益,同时返回的 P 变量则为该增益下所有的闭环极点位置。此外,该函数还将自动地将
该增益下所有的闭环极点直接在根轨迹曲线上显示出来。
例 4.1 已知系统的开环传递函数模型为:
Gk
(s)
s(s
K 1)(s
2)
KG0 (s)
利用下面的 MATLAB 命令可容易地验证出系统的根轨迹如图 4-1 所示。 >> G=tf(1,[conv([1,1],[1,2]),0]);
1 K num 0 den
特征方程的根随参数 K 的变化而变化,即为闭环根轨迹。控制系统工具箱中提供了
rlocus()函数,可以用来绘制给定系统的根轨迹,它的调用格式有以下几种:
rlocus(num,den)
rlocus(num,den,K)
5.8142 p=
-2.29830 -0.0085+1.3961i -0.0085-1.3961i 所以,要想使此闭环系统稳定,其增益范围应为 0<K<5.81。 参数根轨迹反映了闭环根与开环增益 K 的关系。我们可以编写下面的程序,通过 K 的 变化,观察对应根处阶跃响应的变化。考虑 K=0.1,0.2,…,1,2,…,5,这些增益下闭环系统 的阶跃响应曲线。可由以下 MATLAB 命令得到。 >> hold off; % 擦掉图形窗口中原有的曲线。
工具箱中还有一个 rlocfind()函数,该函数允许用户求取根轨迹上指定点处的开环增益值,
并将该增益下所有的闭环极点显示出来。这个函数的调用格式为:
[K,P]=rlocfind(G)
这个函数运行后,图形窗口中会出现要求用户使用鼠标定位的提示,用户可以用鼠标
左键点击所关心的根轨迹上的点。这样将返回一个 K 变量,该变量为所选择点对应的开环
利用MATLAB绘制系统根轨迹
第4章 利用MATLAB 绘制系统根轨迹一、 利用MATLAB 绘制系统根轨迹相关知识假设闭环系统中的开环传递函数可以表示为:)()())(()())(()(021********s KG p s p s p s z s z s z s K den numK a s a s a s b b s b s K s G n m nn n n m m m m k =+⋅⋅⋅+++⋅⋅⋅++==++⋅⋅⋅++++⋅⋅⋅++=---- 则闭环特征方程为: 01=+dennumK特征方程的根随参数K 的变化而变化,即为闭环根轨迹。
控制系统工具箱中提供了rlocus()函数,可以用来绘制给定系统的根轨迹,它的调用格式有以下几种:rlocus(num ,den) rlocus(num ,den ,K) 或者 rlocus(G) rlocus(G ,K)以上给定命令可以在屏幕上画出根轨迹图,其中G 为开环系统G 0(s)的对象模型,K 为用户自己选择的增益向量。
如果用户不给出K 向量,则该命令函数会自动选择K 向量。
如果在函数调用中需要返回参数,则调用格式将引入左端变量。
如[R ,K]=rlocus(G)此时屏幕上不显示图形,而生成变量R 和K 。
R 为根轨迹各分支线上的点构成的复数矩阵,K 向量的每一个元素对应于R 矩阵中的一行。
若需要画出根轨迹,则需要采用以下命令:plot(R ,¹¹)plot()函数里引号内的部分用于选择所绘制曲线的类型,详细内容见表1。
控制系统工具箱中还有一个rlocfind()函数,该函数允许用户求取根轨迹上指定点处的开环增益值,并将该增益下所有的闭环极点显示出来。
这个函数的调用格式为:[K ,P]=rlocfind(G)这个函数运行后,图形窗口中会出现要求用户使用鼠标定位的提示,用户可以用鼠标左键点击所关心的根轨迹上的点。
这样将返回一个K 变量,该变量为所选择点对应的开环增益,同时返回的P 变量则为该增益下所有的闭环极点位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验五利用MATLAB绘制系统根轨迹
一、实验目的
(1)熟练掌握使用MATLAB绘制控制系统零极点图和根轨迹图的方法;
(2)熟练使用根轨迹设计工具SISO;
(2)学会分析控制系统根轨迹的一般规律;
(3)利用根轨迹图进行系统性能分析;
(4)研究闭环零、极点对系统性能的影响。
二、实验原理及内容
1、根轨迹与稳定性
当系统开环增益从变化时,若根轨迹不会越过虚轴进入s右半平面,那么系统对所有的K值都是稳定的;若根轨迹越过虚轴进入s右半平面,那么根轨迹与虚轴交点处的K值,就是临界开环增益。
应用根轨迹法,可以迅速确定系统在某一开环增益或某一参数下的闭环零、极点位置,从而得到相应的闭环传递函数。
2、根轨迹与系统性能的定性分析
1)稳定性。
如果闭环极点全部位于s左半平面,则系统一定是稳定的,即稳定性只与闭环极点的位置有关,而与闭环零点位置无关。
2)运动形式。
如果闭环系统无零点,且闭环极点为实数极点,则时间响应一定是单调的;如果闭环极点均为复数极点,则时间响应一般是振荡的。
3)超调量。
超调量主要取决于闭环复数主导极点的衰减率,并与其它闭环零、极点接近坐标原点的程度有关。
4)调节时间。
调节时间主要取决于最靠近虚轴的闭环复数极点的实部绝对值;如果实数极点距虚轴最近,并且它附近没有实数零点,则调节时间主要取决于该实数极点的模值。
5)实数零、极点影响。
零点减小闭环系统的阻尼,从而使系统的峰值时间提前,超调量增大;极点增大闭环系统的阻尼,使系统的峰值时间滞后,超调量减小。
而且这种影响将其接近坐标原点的程度而加强。
【自我实践5-1】
在实验内容(2)中控制系统的根轨迹上分区段取点,构造闭环系统传递函数,分别绘制其对应系统的阶跃响应曲线,并比较分析。
1:阻尼比=,k=
2:阻尼比=,k=
3:阻尼比= k=
4:阻尼比=,k=0,385
5:阻尼比=(无此阻尼,取),k=
将数据填入实验数据记录表中。
阻尼比
闭环极点p
开环增益K
自然频率n
超调量%
调节时间t s = + 1e+03 = +
= + =1 + 0 =
+
194
\
3、基于SISO 设计工具的系统根轨迹设计
用根轨迹法进行系统校正过程中,分析补偿增益和附加实数(或复数)零极点之间匹配的规律。
在MATLAB 命令窗口中输入命令【rltool 】,然后回车,或者输入【rltool (sys )】函数命令,就可打开系统根轨迹的图形界面。
【综合实践】绘制180°根轨迹。
请绘制: (1)12()(1)(1)g
K G s T s T s =
++;(2)12(1)()(1)(1)
g K as G s T s T s +=
++;
(3)12()(1)(1)(1)
g
K G s T s T s ps =
+++的根轨迹,其中T 1=,T 2=2,a=,p=1,分析附
加零点、极点对根轨迹的影响;固定T 值,分别改变a 和p 的值看附加零、极点位置的变化对根轨迹形状的影响。
将结果填入下表。
传递函数
根轨迹图
零、极点分布的影响分析 12()(1)(1)
g
K G s T s T s =
++
1、 添加开环零点使得系
统根轨迹主要分支左移;添加开环极点使得分支右移;
2、 通过调节开环极点的位置可以得出结论:开环极点离虚轴越近,极点作用越强根轨迹向右的偏移越多;
3、 通过调节开环零点的位置可以得出结论:开环零点离虚轴越近,零点作用越强,根轨迹向左的偏移越多
12(1)()(1)(1)
g K as G s T s T s +=
++
12(
)(1)(1)(1)
g
K G
s T
s T s ps =
+++
分别绘制(1)12(1)()(1)(1)
g K as G s T s T s +=
++;(2)12()(1)(1)(1)
g
K G s T s T s ps =
+++
的0°根轨迹,比较其与180°根轨迹不同。
其中T 1=,T 2=2,a=,p=1。
(1)0°根轨迹: 180°根轨迹:
(2)0°根轨迹: 180°根轨迹:
对于上面的180°和0°根轨迹,求系统临界稳定时的K g 值,求K g =5时系统极点的位置(在根轨迹上的小红块上点击鼠标右键显示极点坐标值,该小红块可以用鼠标拖动);分析此时系统的阶跃动态响应和Bode 图。
临
界稳定K g 值
K g =闭环系统零极点
阶跃响应曲线
分析说明(与180°比较)
传递函数(1)
0°根轨迹
零点:-10 极点:-5,
曲线对称 零度阶跃响应刚好是180度响应的相反数
180°根轨迹
零点:-10 极点:-5,
传递函数(2)
0°根轨迹
零点:无 极点: +
曲线对称 零度阶跃响应刚好是180度响应的相反数
180°根轨迹
零点:无 极点: +
(注:K g 可取其它值,再求出对应的闭环零、极点响应曲线)
伯德图的绘制:
传递函数
伯德图
12(1)()(1)(1)
g K as G s T s T s +=
++;
12()(1)(1)(1)
g
K G s T s T s ps =
+++
三、思考题
1) 附加开环零点总对系统的稳定性是否有利
不一定,引入负的零点会使系统更加稳定,但是引入一个负的零点可能会破坏系统的稳定性
2) 附加开环极点总对系统的稳定性是否不利 不一定,引入负的极点会使系统更加稳定,但是引入一个负的极点可能会破坏系统的稳定性
3) 对实际系统,如何通过附加零点和极点来改善系统性能举例说明。
对传递函数12(1)()(1)(1)
g K as G s T s T s +=
++;通过增加一阶惯性环节来增加系统的
极点,通过增加一阶微分环节来增加系统零点,即可增加系统的稳定性。
4) 如何绘制系统等效根轨迹
绘制根轨迹主要通过引入开环传递函数G 等效,在G 等效将参数变量置于常规根轨迹所对应的开环传递函数G 中K 的位置上,然后按照常规根轨迹的作图法进行作图。
四、实验能力要求
(1)熟练掌握使用MATLAB 绘制控制系统零极点图和根轨迹图的方法。
(2)通过根轨迹图能够确定有用的参数,比如:分离点坐标及相应参数、临界开环增益点及相应参数、任意一点对应的开环增益K 值和闭环极点。
(3)利用根轨迹图进行系统性能分析,以阻尼比为依据分区段比较不同闭环极点对应系统性能的变化。
能够确定系统稳定的开环增益范围。
(4)了解闭环零、极点对系统性能的影响。
(5)学会使用根轨迹设计工具校验系统的动态性能和稳态性能。