基于ANSYS的塔式起重机臂架有限元参数化建模与分析
基于ANSYS的塔式起重机结构有限元分析计算
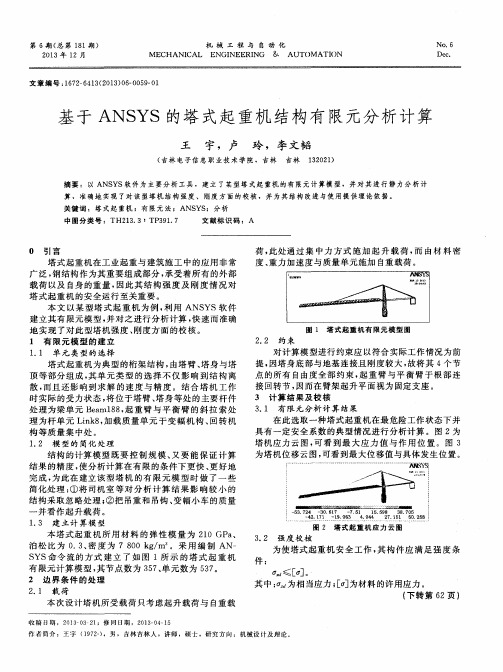
结 构 的计算 模型 既 要控 制 规 模 、 又 要 能 保 证计 算 结果 的精度 , 使分 析计算 在 有限 的条件 下更 快 、 更 好地 完成 , 为此在 建立 该 型塔 机 的 有 限元 模 型 时 做 了一 些 简化 处 理 : ① 将 司机室 等 对 分 析计 算 结 果 影 响较 小 的 结构 采 取忽 略处理 ; ②把 吊重 和 吊钩 、 变幅小 车 的质量 并 看作 起升 载荷 。 1 . 3 建立计 算模 型 本 塔式起 重 机 所 用 材料 的 弹性 模 量 为 2 l O G P a 、 泊松 比为 0 . 3 、 密 度为 7 8 0 0 k g / m。 。采 用 编 制 AN — S YS命令 流的方 式 建 立 了 如 图 1所 示 的 塔 式 起 重 机 有 限元计 算模 型 , 其 节点 数 为 3 5 7 、 单元 数 为 5 3 7 。 2 边界 条件 的处理 2 . 1 载 荷 本 次 设计 塔机所 受载 荷 只考 虑起 升载 荷 与 自重 载
图 2 塔 式 起 重 机 应 力 云 图
3 . 2 强 度 校 核
为使塔 式起重 机 安 全工 作 , 其 构 件应 满 足 强 度 条 件:
≤[ ] 。 、 其中 : 为相 当应力 . [ ] 为材料 的许用 应力 。 ( 下 转第 6 2页 )
收 稿 日期 :2 0 t 3 — 0 3 — 2 1 ;修 网 日期 :2 0 1 3 — 0 4 — 1 5
1 . 1 单 元 类 型 的 选 择
荷, 此 处通 过集 中 力 方式 施 加 起 升 载 荷 , 而 由材 料 密 度、 重力 加速 度与 质量单元 施加 自重 载荷 。
2 . 2 约 束
ANSYS分析塔式起重机吊臂步骤

ANSYS分析塔式起重机吊臂步骤塔式起重机吊臂是一种常见的起重机构。
它通常用于吊装重物,并且能够通过伸缩吊臂的长度来适应不同的工作条件。
利用ANSYS软件进行塔式起重机吊臂的分析可以帮助工程师了解吊臂结构的强度和刚度,并优化设计以满足设计要求。
下面是使用ANSYS软件进行塔式起重机吊臂分析的一般步骤:1.几何建模:首先,需要使用CAD软件或者ANSYS自带的几何建模工具创建塔式起重机吊臂的几何模型。
这个几何模型应该包括所有的主要结构组件,例如吊臂、支撑杆、立柱等。
2.材料定义和加载:在进行分析之前,需要对所使用的材料进行定义。
材料定义应包括材料的弹性模量、泊松比和密度等。
另外,还需要定义适当的加载条件,例如自重载荷、外部工况荷载等。
3.网格划分:对几何模型进行网格划分是进行分析的关键步骤。
足够准确的网格划分可以提供更精确的分析结果。
在划分网格之前,需要根据倾斜角度和吊臂的形状来确定合适的划分方式。
4.约束和边界条件:对于塔式起重机吊臂的分析,通常需要施加一些边界条件和约束。
例如,可以将塔座固定在地面上,使其不能发生任何位移。
此外,还可以施加其他约束条件来模拟实际工作条件。
5.应力分析:完成了网格划分和约束设置后,可以进行应力分析。
应力分析可以帮助工程师了解吊臂在不同工况下的应力分布情况。
可以通过绘制应力云图和边界应力图来可视化这些结果。
6.判断强度:针对应力分析的结果,可以对吊臂的强度进行评估。
可以检查吊臂是否满足强度设计要求,例如是否超过了材料的屈服强度或破坏强度。
7.刚度分析:除了强度外,刚度也是塔式起重机吊臂设计中的重要考虑因素。
可以通过刚度分析来评估吊臂在工作状态下的形变情况。
如果形变过大,可能会影响到起重机的操作性能。
8.优化设计:根据应力和刚度分析的结果,可以对塔式起重机吊臂的设计进行优化。
例如,可以增加材料厚度、增加支撑杆数量或改变结构形式等。
优化设计可以提高吊臂的强度和刚度,在满足设计要求的前提下减少结构重量。
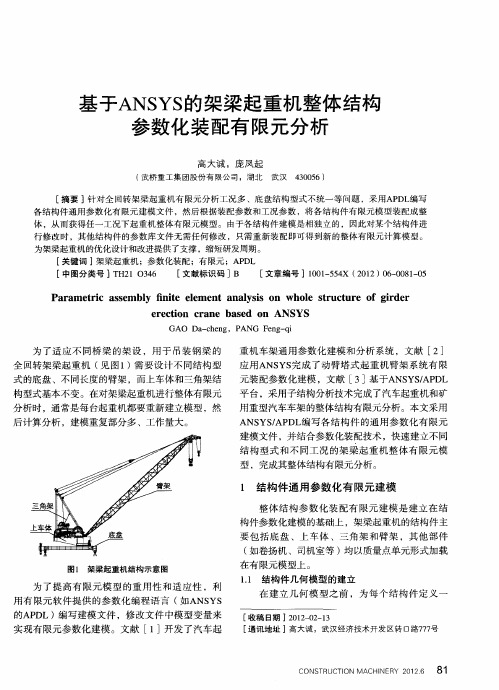
基于ANSYS的架梁起重机整体结构参数化装配有限元分析
模型时 ,先为点 、线 、面和体的编号定义4 个全局 时 ,需要 选 择节点 和单 元 。考 虑 到其他 结构 件 的有 变量 ( N、L K N、A N、V N,初值均为0 ),使其 限元模 型发 生变化 时 ,当前结 构件 有 限元模 型 的节 成为动态 编号。如在建 立某个结构件几何模型之 点 编号 和单 元编号 也会 发生 变化 ,但其 几何 图素 的 前 ,调 用 以下命 令 流 : 编号 ( 点线 面体 编号 )不会 变化 。 因此 ,在选择 节
* GET, KN , KP, 0, NUM , M AX * GET, LN ,LI NE , 0, NUM , M AX GET, AN ,AREA , 0, NUM , M AX GET, VN , V0LU , 0, NUM , M AX
点或单 元 时 ,必 须先 选择包 含该 节点 或单元 的几 何 图素 ,再在 所选 几何 图素 的基 础上选 择所需 节 点或
重 机 车 架通 用 参 数化 建 模 和分 析 系 统 ,文 献 [ 2] 应用 ANS 完成 了动 臂 塔式 起 重 机 臂 架 系统 有 限 YS 元装 配 参数 化 建模 ,文 献 [ 3]基 于ANS / DL YSAP 平 台 ,采 用子 结构 分析 技术 完成 了汽 车起 重机 和矿 用重 型汽 车车 架 的整 体 结构有 限元 分析 。本 文采 用 ANS / DL 写 各 结 构件 的通 用 参 数化 有 限元 YSAP 编
结 构 型 式 和 不 同工 况 的架 梁 起 重 机 整 体 有 限元 模 型 ,完成 其整 体结 构有 限元 分析 。
1 结构件通用参数化有 限元建模
整 体 结 构 参 数 化 装 配 有 限 元 建 模 是 建 立 在 结 构件 参数 化建 模 的基础 上 ,架梁 起重 机 的结构 件主
塔机平衡臂有限元分析ansys课程设计

塔机平衡臂的动力学分析
塔机平衡臂的有限元模型建立 动力学方程的建立与求解 模态分析结果及解释 动力学分析在塔机设计中的应用与展望
塔机平衡臂有限元分析结果的 后处理
有限元分析结果的可视化
可视化内容:包括应力、应 变、位移等结果的可视化
可视化方法:采用ANSYS的 图形界面进行后处理,生成 云图、等值线图等
塔机平衡臂的模态分析结果:通过模态分析可以得到塔机平衡臂的固有频率和模态 振型,这些结果可用于优化塔机平衡臂的结构设计,提高其稳定性和安全性。
塔机平衡臂模态分析的意义:模态分析对于塔机平衡臂的结构设计具有重要意义,通过优 化塔机平衡臂的结构设计,可以提高其工作性能和安全性,减少振动和共振等不利影响。
塔机平衡臂有限元分析ANSYS 课程设计
汇报人:
单击输入目录标题 塔机平衡臂有限元分析概述 塔机平衡臂模型的建立 塔机平衡臂的有限元分析 塔机平衡臂有限元分析结果的后处理 ANSYS软件操作实践
添加章节标题
塔机平衡臂有限元分析概述
有限元分析的基本概念
有限元分析是一 种数值分析方法, 通过将连续的物 理系统离散化为 有限个小的单元, 建立数学模型并 求解得到系统的
根据分析结果,优化塔机平衡臂的 材料选择和材料属性,以提高其承 载能力和耐久性。
添加标题
添加标题
添加标题
添加标题
根据分析结果,优化塔机平衡臂的 尺寸和形状,以减小应力集中和疲 劳损伤。
根据分析结果,优化塔机平衡臂的 连接方式和连接强度,以确保其整 体稳定性和可靠性。
ANSYS软件操作实践
ANSYS软件的基本操作
标。
塔机平衡臂的有限元分析意义
提高塔机设计的可靠性和安全 性
优化塔机结构,降低制造成本
ANSYS分析塔式起重机吊臂步骤

第二章ANSYS分析塔式起重机吊臂步骤2.1 分析问题遇到要分析的问题时,通常要考虑该问题所在的学科领域、分析该问题所要达到的目标等分析方案。
需要考虑以下几点:1、分析领域塔式起重机吊臂的力学分析属于结构分析领域。
2、分析目标利用ANSYS,根据起重特性曲线,计算变幅小车在不同位置时吊臂的受力情况,及拉杆的力。
3、分析类型结构线性静力分析。
4、分析细节的考虑(1)ANSYS中没有定义单位,在应用时,可以采用国际单位制。
(2)在建立模型过程中,要考虑两个下弦杆的相对位置。
根据起重特性曲线,起重量沿臂端方向逐渐减小,因此由两个等边角钢焊接成的方管的横截面积也减小,同时要考虑到变幅小车在下弦杆上行走,故下弦的外廓面和上平面应在同一平面内。
建模时应用点和线,保证模型的连贯性,所以将整个吊臂变截面的下弦杆轴线放在同一水平线上,通过定义单元梁质心的相对位置来保证外廓面和上平面在同一平面内。
(3)变幅小车及吊重可以通过集中力的形式加载到下弦杆上。
(4)风载荷加到关键点上。
(5)吊臂自重通过惯性力施加。
由于吊臂上安装有其他设施,故总重比计算值偏大,这时需要增大密度,来模拟自重。
(6)划分网格时须注意,拉杆采用的LINK8单元只能承受拉力,所以分网时,一个单元只能分一段。
吊臂采用BEAM188单元,分网时可以划分2~3段。
(7)在臂节连接处,实际是使用销轴连接,在模型中进行耦合来模拟销轴连接。
2.2建立K25/20塔式起重机吊臂模型吊臂的模型结构比较简单,只要在笛卡儿坐标系中输入各个节点的位置,然后将每个点连成直线即可。
在建模前要对吊臂的形状有一个全面的了解,然后列出每个节点的坐标。
下面是K25/20塔式起重机吊臂节点位置。
1、节点编号及坐标位置(mm):在定义的关键点中,吊臂每节后三个点和下一节前三个点的坐标相同,用来进行耦合处理。
点击Main menu >Preprocessor>Modeling>Create>Keypoint>In active CS进入Create keypoints in active coordinate system对话框。
基于ANSYS的塔式起重机臂架有限元参数化建模与分析

1
参数化
在进行系列产品设计 中, 由于其 结构形式 相
同, 而结构尺寸不同 , 如果逐个进行建模分析, 需 要花费大量的人力 和物力资源 , 造成设计周 期延 长。将参数化的思想引进到有限元的分析过程中 , 可以减少系列产品有限元分析的工作量 , 缩短设计 周期 , 提高设计效率。 参数化的概念涵盖很广, 通常指的是参数化的 造型 , 它是一种重要的几何参数快速构造和修改几 何模型的造型方法。参数化设计是实现设计自动化 的主要手段之一。参数化建模用于基本结构形状相 同但具体模型形状有较小变动的系列产品的设计。 根据如何得到参数值 , 可以将常见的参数化方法分 起重运输机械 2006 ( 9)
为如下几种 : 代数法、人工智能法、直接操作法和 语言描叙法。本文中有限元参数化模型的建立采用 的就是 ANSYS 的 APDL 语言描述法。
2
臂架结构参数化建模分析算例
采用交互式建立塔机的有限元模型, 建模的工
作量将十分巨大, 而且当臂架结构发生变化时 , 需 要重新建立模型。如果把结构模型都以参数化技术 进行有限元建模, 当需要新产品结构设计时, 只需 要输入必要的、合理的参数值, 即可自动建模。考 虑到塔机结构主要以型钢焊接结构为主, 结构具有 相似性, 为进行参数化建模分析提供了必要条件。 可以采用 VB、VC 等程序设计语言编制程序 , 用户 只要输入建立塔机结构所需的一些必要参数, 就可 以输出 ANSYS 参数化建模分析所需的参数化文件, 自动建立塔机有限元分析模型, 这样就可以减小模 型建立需要 的时间, 提 高工作效 率。利用 ANSYS 进行结构参数化建模与分析的基本流程见图 1。 2 1 臂架结构相关参数确定 塔机臂架形式多种多样 , 这里以最常见的正三 角形截面双吊点吊臂为例进行说明。要构建臂架的 有限元参数化模型 , 首先要确定与臂架相关的结构 参数, 主要包括以下数据: ( 1) 基本数据: 包括起 重量、小车轮距、臂架段数、臂架根部到回转中心 距离、小车及吊钩质量等。 ( 2) 臂架的基本数据: 包括臂架高 度、宽度、臂架 段数、每段长 度、节 11
基于Ansys+Workbench的起重机吊臂结构全伸臂工况的有限元分析
全伸臂工况的有限元分析
李春风,董庆华,李少杰,郝清龙 ,王宇飞,曹
(承德石油高等专科学校工业技术中心,河北
硕
承德067000)
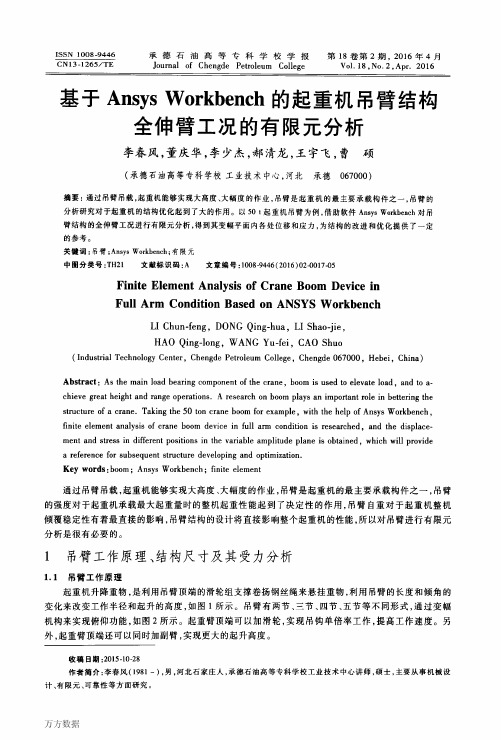
摘要:通过吊臂吊载,起重机能够实现大高度、大幅度的作业,吊臂是起重机的最主要承载构件之一,吊臂的 分析研究对于起重机的结构优化起到了大的作用。以50 t起重机吊臂为例,借助软件Ansy。w。,kbench对吊 臂结构的全伸臂工况进行有限元分析,得到其变幅平面内各处位移和应力,为结构的改进和优化提供了一定
的参考。
关键词:吊臂;Ansys Workbench;有限元
中图分类号:TH21 文献标识码:A 文章编号:1008.9446(2016)02-0017-05
Finite Element Analysis of Crane Boom Device in Full Arm Condition Based
吊臂工作原理、结构尺寸及其受力分析
1.1吊臂工作原理 起重机升降重物,是利用吊臂顶端的滑轮组支撑卷扬钢丝绳来悬挂重物,利用吊臂的长度和倾角的 变化来改变工作半径和起升的高度,如图1所示。吊臂有两节、三节、四节、五节等不同形式,通过变幅
机构来实现俯仰功能,如图2所示。起重臂顶端可以加滑轮,实现吊钩单倍率工作,提高工作速度。另
位移。 2.3后处理
Ansys
Workbench的后处理中Geometry按钮控制云图的显示方法,共有四个可用选项:Exterior是默
认的显示方式并且是常用的方式,IsoSuffaces对于显示相同的值域是非常有用的,Capped IsoSurfaces是 指删除了模型的一部分后的显示结果,删除的部分是可变的,高于或者低于某个指定值的部分被删除,
基于ANSYS的全地面起重机吊臂有限元参数化建模与分析
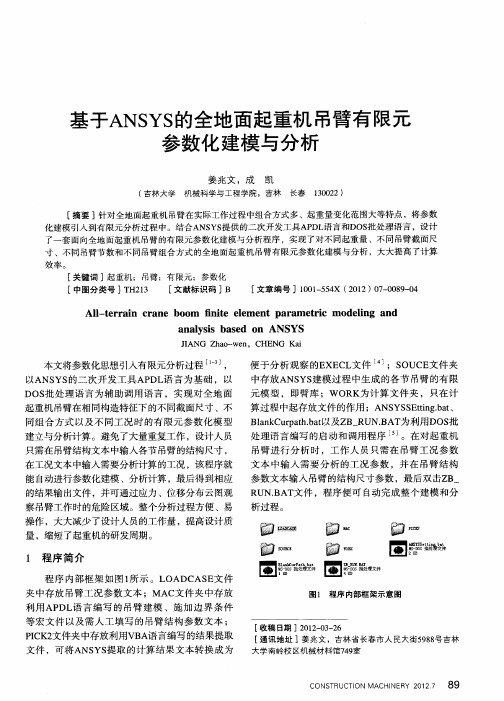
察 吊臂工作时的危险区域 。整个分析过程方便 、易 操作 ,大大减 少 了设 计人 员 的工作 量 ,提高设 计 质
量 ,缩 短 了起 重机 的研 发周期 。
1 程序 简 介
程序内部框架如图1 所示 。LOADC E 件 AS 文
囤 , Mt ̄  ̄tt Yi Sb S 固 菇 : 盘 鼗 围Z B s R  ̄ J "
a l ss na y i ba e o ANSYS s d n
J ANG a —we I Zh o n, CHENG i Ka
本 文将 参数 化思想 引入 有限元 分析 过程 J ,
以ANS 的二 次 开 发 工 具 AP 语 言 为基 础 ,以 YS DL
便 于 分 析 观 察 的 E CL 件 ;S XE 文 OUC 文 件 夹 E 中存 放 ANS 建模 过 程 中生 成 的各 节 吊臂 的有 限 YS
同组合 方式以及不 同工况 时的有 限元参数化模型 Bln C rahb t 及 Z — UN.AT ak upt.a/ 2  ̄ BR B 为利 用DOS 批 。在 对 起重 机 建立与分析计算 。避免了大量重复工作 ,设计人员 处理 语 言 编写 的启 动 和调 用 程序 J
只需 在 吊臂结 构文本 中输 入各 节 吊臂 的结 构尺 寸 , 在工 况文 本 中输 入需 要分 析计算 的工况 ,该程 序就 能 自动进 行参 数化 建模 、分析 计算 ,最 后得 到相应
图1 程序 内部框架示意 图
[ 收稿 日期 ] 0 2 0 — 6 2 1— 3 2 [ 通讯地 址 ]姜兆 文 ,吉林省长 春市人 民大街5 8 号 吉林 98
大学南岭校 区机械材 料馆7 9 4 室
C N T U TO C IE Y 2 1 89 O S R C INMA HN R 0 7 2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1
参数化
在进行系列产品设计 中, 由于其 结构形式 相
同, 而结构尺寸不同 , 如果逐个进行建模分析, 需 要花费大量的人力 和物力资源 , 造成设计周 期延 长。将参数化的思想引进到有限元的分析过程中 , 可以减少系列产品有限元分析的工作量 , 缩短设计 周期 , 提高设计效率。 参数化的概念涵盖很广, 通常指的是参数化的 造型 , 它是一种重要的几何参数快速构造和修改几 何模型的造型方法。参数化设计是实现设计自动化 的主要手段之一。参数化建模用于基本结构形状相 同但具体模型形状有较小变动的系列产品的设计。 根据如何得到参数值 , 可以将常见的参数化方法分 起重运输机械 2006 ( 9)
的寻优模式。这种解法在工程应用中存在着明显缺 陷 , 它只能获得特定条件下的某一 Pareto 解[ 2] , 该 解往往受限于 设计人员对优化模型性 态的理解程 度、实践经验和个人偏好等先验知识 , 因而在工程 中并非最合理、最理想。 上世纪 70 年代中期发展起来的遗传算法, 由 于其具有随机性的大规模并行搜索特性, 因而成为 求解多目标优化问题新的研究热点[ 3] [ 4] 。本文利用 遗传算法求出多目标优化问题的 Pareto 解集 , 据此 通过决策获得原问题的工程最优解, 形成先寻优后 决策的多目标优化问题求解模式。
2 王金诺等 社 , 2002 3 徐格宁等 起重运输机金属结构设 计 北京 : 机械工 业 出版社 , 1997 4 ANSYS 公司 ANSYS 高级分析技术指南 5 博弈创作 室 APDL 参数 化有 限元 分析 技术 及其 应用 实 例 作 地 北京 : 中国水利水电出版社 , 2004 者 : 任会礼 址 : 武汉 洪山 区珞 瑜 路 1037 号华 中 科技 大学 C5 306 编 : 430074 起重运输机金属结构 北京 : 中国铁道出 版
图 3 臂架 模型
图 4 臂架变形图
图 2 圆管单元划分
图 5 臂架变 形云图
12
起重运输机械
2006 ( 9)
基于 Pareto 解集的多目标优化方法及其应用
沈阳建筑大学交通与机械工程学院
摘
费
烨
李楠楠
韩泽光
要 : 针对传统多目标优化设计方法的弱点 , 基于 Pareto 概念 , 借助遗传算法所具有的并行搜索特 性 , 引
一个好的设计, 在总体上必定要体现最大化效 益、最小化成本这一基本原则 , 因而优化设计本质 上应该属于多目标优化问题。与单目标优化不同的 是, 多目标优化问题最优解集中的元素就全体目标 而言往往不可比较, 甚至对一个目标的改善要以其 它目标性能的下降为代价。因此, 多目标优化问题 一般不存在唯一的最优解 , 而是存在多个满意解的 集合, 一般称为 Pareto 最优解集 [ 1] 。传统上处理多 目标优化的方法如线性加权法、功率系数法、协调 曲线法等 , 都是通过某种数学变换将多目标优化转 化为单目标优化问题进行求解 , 属于先决策后搜索
图 1 参数化 建模分析流程
本文以某台塔机为例 , 参数取值如下: 吊重质 量 1 200 kg; 塔帽高度 7 060 mm; 小车到回转中心 距离 52 000 mm; 变幅机构质量 245 kg; 变幅机构 到回转中心距离 7 550 mm; 臂架根部到回转中心距 离 750 mm; 臂架分段数为 8; 小车及吊钩质量 395 kg; 小车轮距 1 000 mm; 臂架截面中心线高 1 199 mm; 臂架截面中心宽 1 235 mm; 臂架拉杆直径 50 mm; 第 1 吊点中心距 12 710 mm; 第 2 吊点中心距 37 250 mm 。所有参数通过用户界面进行输入。 2 2 臂架结构参数化建模分析文件的生成 当臂架的结构参数输入完成后 , 就可以生成参 数化建模及分析文件了。以塔机臂架为例 ( 单元及 节点的划分见图 2) , 编写文件输出的函数 , 输出 ANSYS 参 数化 建 模 及 分 析 文件。单 元 类 型 选 用 BEAM44 单元 , 因为 BEAM44 单元可以自定义单元 的截面形状, 可以较好的再现角钢组合、方钢、角 钢等实际形状, 使计算更接近实际。以圆管为例 , 自定义截面时需要输入外径、内径和沿圆周方向要 划分的单 元数 , 采用命 令 SECDATA, R i, R o , N 来进行截面的定义, R i 为内径, R o 为外径, N 为 单元数, 缺省为 8。
在塔式起重机 ( 以下简称塔机 ) 臂架结构的设 计验算中 , 普遍采用的方法是设计人员最初依据材 料力学原理, 采用许用应力方法进行塔机臂架结构 的设计与校核。运用这种方法由于受工作量限制 , 只能验算几个在理论上认为是危险的截面, 计算的 精度从建模开始就必然受到限制。 随着计算机的飞速发展, 几乎所有的设计制造 都离 不开 有 限元 分 析 计 算, FEA ( Finite E1ement Analysis) 在工 程设计和分析中得到越来越广 泛的 重视 , 其计算结果不仅详尽, 而且更具可靠性。采 用有限元分析的方法进行塔机金属结构的设计计算 将会极大的提高设计效率、保证塔机的设计质量。
基于 ANSYS 的塔式起重机臂架 有限元参数化建模与分析
华中科技大学
摘
任会礼
济南二机床集团公司
李江波
太原科技大学
高崇仁
要 : 针对塔式起重机在有限元分析过程中建模工作量大的问题 , 将参数 化思想引入 有限元分 析过程中 ,
采用有限元参数化分析文本自动生成技术 , 以通用编 程语言 为基础编 制程序 , 根据输 入参数自 动生成 有限元 建 模分析所需的参数化文件 , 进行结构建模与分析 , 并以塔机臂架结构为例说明方法的可行性。 关键词 : 有限元 ; 参数化建模 ; 塔式起重机 ; 臂架 Abstract: Modeling of tower crane involves a large amount of work, In response to it, this paper applies parameter ized technology to establish finite element model of tower crane, the parameter being created by programs automatically. An actual tower crane boom finite element model is established to show the feasibility of the method. Keywords: finite element; parameterized modeling; tower crane; boom
长、每段臂架节数。 ( 3) 拉杆基本数据: 包括拉杆 直径、吊点位置、拉杆形式等。
在实际应用中 , 尽管 APDL 语言具有基本的赋 值和循环、判断等功能 , 但其编程的功能终归没有 通用 计算 机语 言 ( VB、 VC 等 ) 强 大, 手工 编写 APDL 批 处理 程序仍 然不 十分 直观 和方 便。 而且 APDL 涉及 ANSYS 的内部命令流, 普通用户并不熟 悉 , 考虑到以上各方面的因素, 可采用 APDL 参数 化文本的自动生成技术 , 即采用通用的高级语言编 制 APDL 参数化建模需要的函数库 , 通过调用函数 库写出参数化建模与分析所需的参数化文本文件。 2 3 计算结果 生成参数化分析文 件后, 有 2 种方式 进行分
入群体排序技术、小生境技术求得多目标优化问题的 Pareto 解集 , 实现了先寻优后决策的求解模式。实际工程 算 例表明 , 该模式可同时获得多个 Pareto 最优解 , 据此决策能有效弱化设计人员先验知识不足的影响 , 因而较传 统 多目标优化方法更为实用有效。 关键词 : 多目标优化 ; Pareto 解集 ; 遗传算法 ; 应用 Abstract: In view of the shortcomings of traditional multi- objective optimization methods, the Pareto sets of multi- objec tive optimization problem is provided by introducing population ranking and niche technique into genetic algorithm. The pattern making decision after searching optimum solutions is realized. Several Pareto optimum solutions can be obtained and this weaken designer s transcendental information deficiency problem. An engineering example shows that the pattern is more applicable and effective than traditional one. Keywords: multi- optimization; Pareto set; genetic algorithm; decision- making3Fra bibliotek结束语
( 1) ANSYS 功能强大 , 可以解决工程中的很多
析 : ( 1) 采用 GUI 方式 进行。运行 ANSYS 程序, 在命令输入框中按 Input, FileName, txt 格式输入命 令。其中 FileName, txt 为生成的 ANSYS 参数化分 析文件名称。( 2) 采用后台运行的方式 , 即不直接 进入 ANSYS 程序, 而是直接通过程序调用 ANSYS, 进行后台运行分析。采用后台运行方式, 在 VB 中 调用 ANSYS 的方式为: SHELL ( d: \ ANSYS57 \ BIN \ INTEL \ ANSYS57- b - pansys- pro ductfeature- i input- f ile - o output- file , SW- SHOWNOR MAL) 。 本文所采用的是后台运行的方式 , 即在 VB 中 调用 ANSYS 。如果要观察所得结果的图形显示 , 建 议采用 GUI 方式进行 , 在该方式下, 可以在 ANSYS 环境中通过图形显示模型图、应力分布云图和变形 图等, 见图 3、图 4、图 5。