嵌入式课程设计实验报告
嵌入式系统实验报告
嵌入式系统实验报告在本学期的嵌入式系统课程中,我与我的实验伙伴进行了多次实验。
在这篇报告中,我将分享我们实验的过程和结果。
实验一:GPIO控制LED灯在这个实验中,我们使用了Raspberry Pi 3B+开发板和一根杜邦线。
我们在电路板上将一盏LED灯与GPIO引脚连接起来,并编写了一个程序来控制这个引脚的电平状态。
在这个实验中,我们学习了GPIO的基本概念以及如何使用Python编程语言编写GPIO控制程序。
我们成功地让LED灯在不同的时间间隔内闪烁,并且了解了如何使用GPIO.setup()和GPIO.output()函数来控制GPIO引脚的输入和输出。
实验二:串口通信在第二个实验中,我们使用了两个Raspberry Pi 3B+开发板和两根串口线。
我们连接了两个板子的GPIO引脚,使得它们可以通过串口进行通信。
我们使用Python编写了两个程序来进行通信。
一个程序将发送一条消息,另一个程序将接收这个消息并将其打印出来。
通过使用串口通信,我们学会了如何使用Python编写程序来完成数据交换,并掌握了串口通信的基本概念。
实验三:Pi camera模块在第三个实验中,我们使用了Pi camera模块和一个Raspberry Pi 3B+开发板。
我们将摄像头连接到开发板上,并编写了一个程序来捕捉摄像头图像。
我们学习了如何使用Python编程语言来控制Pi camera模块,包括如何设置摄像头参数并如何捕捉静态图像。
我们还尝试了使用OpenCV库来处理图像。
实验四:蓝牙控制在最后一个实验中,我们使用了一个蓝牙透传模块、Raspberry Pi 3B+开发板和一些电路元件。
我们将蓝牙透传模块连接到GPIO引脚,并编写了一个程序来通过蓝牙信号控制电机。
在这个实验中,我们学习了如何使用蓝牙模块进行无线控制。
我们通过使用Python编写控制程序,成功地将蓝牙信号转换成GPIO引脚的电平信号来控制电机。
总结在这个嵌入式系统的实验中,我们学习了许多关于嵌入式系统的知识和技能。
嵌入式课程设计报告

调试工具
使用GDB等调试工具进行程序调试, 可实现断点设置、变量查看、堆栈跟
踪等功能。
版本控制工具
使用Git等版本控制工具进行代码管理 ,实现多人协作开发、版本回溯等功 能。
性能分析工具
使用Valgrind等性能分析工具进行程 序性能分析,可实现内存泄漏检测、 函数调用关系分析等功能。
课程设计总结与展望
总结本次课程设计的经验教训和收 获,展望嵌入式系统未来的发展趋 势和应用前景。
02
硬件平台选择与搭建
常见嵌入式硬件平台比较
ARM平台
高性能、低功耗,广泛应用于智能手机、 平板电脑等移动设备。
PowerPC平台
高性能、高可靠性,适用于工业控制、航 空航天等高端应用设备、 数字电视等领域。
07
总结与展望
本次课程设计收获总结
理论与实践结合
通过本次课程设计,深入理解了 嵌入式系统的基本原理,同时将 理论知识应用于实际项目中,实 现了理论与实践的有机结合。
技能提升
在课程设计过程中,掌握了嵌入 式系统开发的基本技能,包括硬 件设计、软件编程和调试技术等 。
团队合作
与团队成员紧密合作,共同完成 了课程设计的任务,提高了团队 协作和沟通能力。
05
系统实现过程与代码展示
关键模块代码实现技巧分享
模块化设计
将系统划分为多个独立的功能模块,每个模块具有明 确的接口和功能,便于代码的管理和复用。
高效算法选择
针对系统需求,选择合适的算法和数据结构,以提高 代码执行效率。
代码优化
通过减少冗余代码、提高代码可读性和可维护性,降 低系统资源消耗。
系统集成测试方法论述
嵌入式课程设计报告
嵌入式课程设计实训报告

一、实训目的通过本次嵌入式课程设计实训,使学生掌握嵌入式系统设计的基本原理和方法,提高学生的实际操作能力和创新意识,培养学生的团队协作精神。
同时,通过实训,使学生熟悉嵌入式系统的硬件平台、软件开发环境,掌握嵌入式编程语言,了解嵌入式系统的调试和测试方法。
二、实训内容本次实训以设计一个简单的温室环境监测系统为例,主要包括以下几个方面:1. 系统需求分析温室环境监测系统主要实现对温室内部光照、温度、湿度的实时监测,并根据监测结果自动调节环境参数,确保温室内的作物生长环境稳定。
系统需具备以下功能:(1)实时监测光照、温度、湿度等环境参数;(2)根据预设阈值,自动调节环境参数;(3)通过LCD显示屏实时显示监测数据;(4)通过串口通信将数据传输至上位机;(5)具有按键控制功能,如开关报警、手动调节等。
2. 硬件平台设计本次实训采用STM32系列微控制器作为核心控制单元,结合DS18B20数字温度传感器、DHT11数字湿温度传感器、光敏电阻、LCD显示屏、蜂鸣器、按键等外围设备,构建温室环境监测系统硬件平台。
3. 软件设计(1)系统初始化:初始化微控制器,配置相关外设参数,设置中断优先级等。
(2)数据采集:通过ADC读取光敏电阻的模拟值,计算光照强度;通过DS18B20和DHT11传感器读取温度和湿度数据。
(3)数据处理:对采集到的数据进行处理,如温度、湿度阈值判断,光照强度阈值判断等。
(4)环境参数调节:根据预设阈值,自动调节加热装置、风扇等设备,以实现环境参数的自动调节。
(5)数据显示:通过LCD显示屏实时显示光照、温度、湿度等数据。
(6)串口通信:通过串口将数据传输至上位机。
(7)按键控制:实现报警功能、手动调节等功能。
4. 系统调试与测试在系统开发过程中,对硬件平台和软件进行调试和测试,确保系统稳定运行。
主要测试内容包括:(1)硬件测试:检查各外设是否正常工作,如传感器、显示屏、按键等。
(2)软件测试:测试系统功能是否满足需求,如数据采集、处理、显示、通信等。
嵌入式实验四实验报告
嵌入式实验四实验报告实验四:嵌入式编程设计
实验设计目的:
1. 学习使用嵌入式开发工具进行编程设计;
2. 学习使用C语言编写嵌入式程序;
3. 学习使用GPIO模块进行输入输出;
4. 学习使用中断处理函数。
实验器材:
1. 嵌入式开发板;
2. USB数据线;
3. 电脑;
4. LED灯;
5. 电阻;
6. 蜂鸣器;
7. 其他必要的电路元件。
实验步骤:
1. 连接开发板和计算机,安装开发板驱动程序;
2. 打开嵌入式开发工具,创建一个新的工程;
3. 在工程中添加一个C文件,编写程序;
4. 编写程序实现以下功能:
- 使用GPIO模块控制LED灯的亮、灭;
- 使用GPIO模块读取按键状态;
- 使用GPIO模块控制蜂鸣器的开、关;
- 使用Timer模块计时;
- 使用中断处理函数处理外部中断;
- 其他必要的功能;
5. 编译程序,下载到开发板;
6. 运行程序,测试功能是否正常。
实验结果与分析:
实验结果应当是LED灯、蜂鸣器、按键正常工作,可以通过按键控制LED灯的亮、灭、蜂鸣器的开、关。
实验总结:
通过本次实验,我学会了使用嵌入式开发工具进行编程设计,掌握了使用C语言编写
嵌入式程序的方法。
通过实验,我深入理解了嵌入式系统的原理和实现方法,对嵌入
式系统的应用有了更加深入的了解。
在今后的学习和工作中,我将能够更好地运用嵌
入式技术解决实际问题。
嵌入式实训课实验报告
一、实验背景嵌入式系统在现代工业、消费电子、智能家居等领域扮演着越来越重要的角色。
为了让学生深入了解嵌入式系统的设计原理和开发过程,提高学生的实践能力和创新精神,我们开设了嵌入式实训课程。
本次实验报告将针对实训课程中的部分实验进行总结和分析。
二、实验目的1. 掌握嵌入式系统的基本原理和开发流程。
2. 熟悉嵌入式开发工具和环境。
3. 熟练使用C语言进行嵌入式编程。
4. 学会调试和优化嵌入式程序。
三、实验内容本次实训课程共安排了五个实验,以下是每个实验的具体内容和实验步骤:实验一:使用NeoPixel库控制RGB LED灯带1. 实验目的:学习使用NeoPixel库控制RGB LED灯带,实现循环显示不同颜色。
2. 实验步骤:(1)搭建实验平台,连接NeoPixel LED灯带。
(2)编写程序,初始化NeoPixel库,设置LED灯带模式。
(3)通过循环,控制LED灯带显示不同的颜色。
实验二:使用tm1637库控制数码管显示器1. 实验目的:学习使用tm1637库控制数码管显示器,显示数字、十六进制数、温度值以及字符串,并实现字符串滚动显示和倒计时功能。
2. 实验步骤:(1)搭建实验平台,连接tm1637数码管显示器。
(2)编写程序,初始化tm1637库,设置显示模式。
(3)编写函数,实现数字、十六进制数、温度值的显示。
(4)编写函数,实现字符串滚动显示和倒计时功能。
实验三:使用ds18x20库和onewire库读取DS18B20温度传感器的数据1. 实验目的:学习使用ds18x20库和onewire库读取DS18B20温度传感器的数据,并输出温度值。
2. 实验步骤:(1)搭建实验平台,连接DS18B20温度传感器。
(2)编写程序,初始化ds18x20库和onewire库。
(3)编写函数,读取温度传感器的数据,并输出温度值。
实验四:使用ESP32开发板连接手机热点,并实现LED1作为连接指示灯1. 实验目的:学习使用ESP32开发板连接手机热点,并通过LED1指示灯显示连接状态。
嵌入式系统 实验报告
使能 IRQ 中断。
4 装载并使能外中断;
5 选用 DebugInExram 生成目标,然后编译连接工程。
6 选择【Project】->【Debug】,启动 AXD 进行 JTAG 仿真调试。
7 全速运行程序,LED 闪烁;
8 每一次按键 Key,蜂鸣器就会转换静音或鸣响状态。
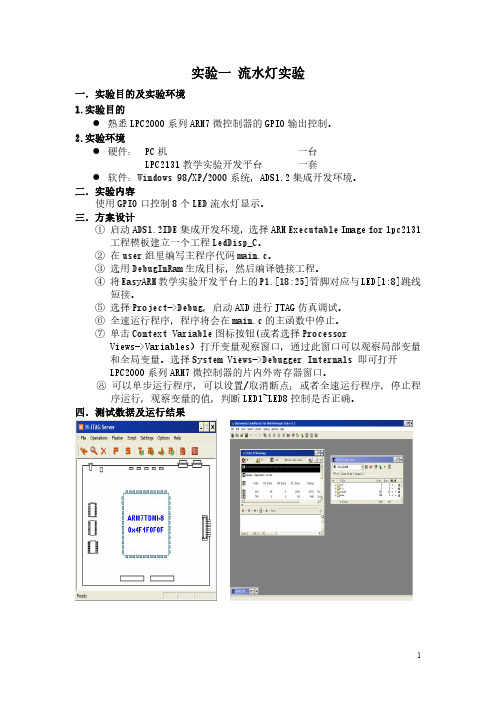
四.测试数据及运行结果
1
五.总结
1.实验过程中遇到的问题及解决办法;
由于本次实验较简单,且我们之前学习的微机原理课程也进行了流水灯的设
计实验,所以对于本次实验,我完成地很顺利,在实验中没有遇到问题。
2.对设计及调试过程的心得体会。
本次实验是本学期该课程我们进行的第一次实验,总的来说,实验不是很难,
设计过程也相对简单,其主要目的是让我们熟悉一下实验环境,并且能在实验环
6
五.总结 1.实验过程中遇到的问题及解决办法;
实验第一次运行时,蜂鸣器一直处于鸣响状态,及时按了按键,蜂鸣器还是 一直鸣叫,不产生外中断。后来仔细检查了程序,发现原来是忘记使能 EINT0 中 断了,加上 VICIntEnable = 1<<0x0e 代码,程序就能正常运行了。 2. 对设计及调试过程的心得体会。
境下进行简单的实验操作,为之后的实验打下坚实的基础。
六.附录:源代码(电子版)
#include "config.h"
const uint32 LEDS8 = 0xFF << 18;//P1[25:18]控制 LED1~LED8,低电平点亮
const uint32 KEY = 1 << 16;
//P0.16 连接 KEY1
三.方案设计
① 启动 ADS1.2IDE 集成开发环境,选择 ARM Executable Image for lpc2131
嵌入式实验设计实训报告
一、实验背景随着信息技术的飞速发展,嵌入式系统在各个领域得到了广泛的应用。
为了让学生更好地掌握嵌入式系统设计的相关知识,提高学生的动手能力和实际操作能力,我们开展了嵌入式实验设计实训。
本次实训以ARM处理器为平台,通过实际操作,让学生了解嵌入式系统的基本原理和设计方法。
二、实验目的1. 熟悉ARM处理器的基本架构和编程环境。
2. 掌握嵌入式系统设计的基本流程和方法。
3. 培养学生的动手能力和实际操作能力。
4. 提高学生对嵌入式系统的认知和应用能力。
三、实验内容1. 实验环境(1)硬件平台:ARM处理器开发板(2)软件平台:Keil uVision5、GNU ARM Embedded Toolchain2. 实验步骤(1)搭建实验环境首先,将开发板连接到计算机,并安装Keil uVision5和GNU ARM Embedded Toolchain软件。
接着,配置开发板,使其能够正常运行。
(2)编写程序根据实验要求,编写嵌入式系统程序。
程序主要包括以下几个方面:1)初始化:设置时钟、GPIO、中断等。
2)主循环:实现程序的主要功能。
3)中断处理:处理外部中断。
4)延时函数:实现延时功能。
(3)编译程序将编写好的程序编译成可执行文件。
(4)下载程序将编译好的程序下载到开发板上。
(5)调试程序在开发板上运行程序,通过串口调试软件观察程序运行情况,并对程序进行调试。
(6)实验报告根据实验内容,撰写实验报告。
3. 实验项目(1)点亮LED灯通过控制GPIO端口,实现LED灯的点亮和熄灭。
(2)按键控制LED灯通过检测按键状态,控制LED灯的点亮和熄灭。
(3)定时器实现定时功能使用定时器实现定时功能,例如定时关闭LED灯。
(4)串口通信实现串口通信,发送和接收数据。
四、实验结果与分析1. 点亮LED灯实验成功实现了通过控制GPIO端口点亮LED灯的功能。
2. 按键控制LED灯实验成功实现了通过检测按键状态控制LED灯的功能。
嵌入式设计实验报告
一、实验目的1. 熟悉嵌入式系统开发的基本流程和常用工具;2. 掌握嵌入式系统硬件资源的使用方法;3. 熟悉嵌入式系统软件开发的基本方法;4. 提高嵌入式系统设计能力。
二、实验内容1. 硬件平台:基于STM32F103系列单片机的开发板;2. 软件平台:Keil uVision5集成开发环境;3. 实验任务:设计一个简单的嵌入式系统,实现按键输入和LED灯控制功能。
三、实验原理1. 硬件原理:STM32F103系列单片机是一款高性能、低功耗的ARM Cortex-M3内核微控制器,具有丰富的片上外设资源,如GPIO、定时器、ADC等。
在本实验中,主要使用GPIO进行按键输入和LED灯控制。
2. 软件原理:嵌入式系统软件开发主要包括底层驱动程序、中间件和应用层。
底层驱动程序负责硬件资源的管理和配置;中间件提供系统服务,如通信、定时器等;应用层实现用户功能。
在本实验中,主要使用C语言编写程序,实现按键输入和LED灯控制功能。
四、实验步骤1. 硬件连接:将开发板上的按键和LED灯分别连接到单片机的GPIO端口;2. 软件编写:(1)创建项目:在Keil uVision5中创建一个新的项目,选择STM32F103系列单片机作为目标设备;(2)添加源文件:添加一个C语言源文件,用于编写主程序;(3)配置GPIO:在源文件中编写GPIO初始化代码,配置按键和LED灯的GPIO端口为输入和输出模式;(4)编写按键输入程序:编写按键扫描函数,用于检测按键状态,并根据按键状态控制LED灯;(5)编译程序:编译项目,生成目标文件;(6)下载程序:将编译好的程序下载到开发板;3. 实验验证:在开发板上运行程序,观察按键输入和LED灯控制功能是否正常。
五、实验结果与分析1. 实验结果:按键按下时,LED灯点亮;按键松开时,LED灯熄灭;2. 实验分析:通过编写程序,实现了按键输入和LED灯控制功能,验证了嵌入式系统开发的基本流程和常用工具。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《嵌入式系统开发技术》——课程设计(实习)报告信息工程学院编制任务项目2 按键中断控制串口 (3)1. 目的 (3)2. 内容 (3)3. 要求 (3)任务项目3 PWM控制蜂鸣器以及通过串口控制其频率 (6)1. 目的 (6)2. 内容 (6)3. 要求 (6)任务项目4看门狗定时器编程 (9)1. 目的 (9)2. 内容 (9)3. 要求 (9)任务项目5 u-boot源码详细分析 (12)1. 目的 (12)2. 内容 (12)3. 要求 (12)4. 附录 (12)5.代码注释 (15)心得体会 (18)任务项目2 按键中断控制串口1. 目的(1)熟悉裸机按键中断的发生及通过串口输出字符过程。
2. 内容独立编写程序实现:(1)当按下按键SW7时发生中断,设计中断服务函数使得蜂鸣器鸣响同时串口输出SW7。
(2)当按下按键SW8时发生中断,设计中断服务函数使得蜂鸣器结束鸣响同时串口输出SW8;3. 要求请将实验过程截图黏贴到下面的空白处。
任务项目3 PWM控制蜂鸣器以及通过串口控制其频率1. 目的(1)熟悉裸机下PWM定时器、串口程序的编写。
2. 内容(1)参照课本程序调试运行使得PWM定时器能控制蜂鸣器;(2)加入串口程序使得当在串口输入“A”和“B”时蜂鸣器能以不同的频率鸣响。
提示:可参看教材中断这一章编写程序。
3. 要求请将实验过程截图黏贴到下面的空白处。
任务项目4看门狗定时器编程1. 目的(1)熟悉裸机下看门狗定时器程序的编写、测试及运行。
2. 内容(1)参看课本程序,调试运行,实现通过定时器精确控制蜂鸣器延时1秒钟;(2)控制蜂鸣器鸣响使之模仿简单歌曲《读书郎》。
提示:参看系统时钟和定时器这一章编写程序。
3. 要求请将实验过程截图黏贴到下面的空白处。
任务项目5 u-boot源码详细分析1. 目的(1)熟悉u-boot工程的总体结构。
(2)熟悉u-boot的流程、主要的数据结构、内存分配。
(3)熟悉u-boot的重要细节,主要分析流程中各函数的功能。
2. 内容S5PV210 u-boot源码分析3. 要求请添加u-boot源码注释,查看相关数据手册,添加代码注释,以实验台为基数,每组完成i部分的50行代码。
注释添加示例:Start.S中一段程序:.globl _start_start: b reset // b是跳转指令,即跳转到reset标签处。
接着返回到此处。
ldr pc, _undefined_instruction //设置中断向量表0x0 0x4.....0x8 0xcldr pc, _software_interruptldr pc, _prefetch_abortldr pc, _data_abortldr pc, _not_usedldr pc, _irqldr pc, _fiq4. 附录1. u-boot启动流程1.1 启动阶段分为3个,bl0,bl1,bl2。
下面只是就功能方面对它们做说明,实际设计的时候,也许会对其具体功能做出调整,也就是说,这几个阶段的划分是就功能而言的,不能看得太死。
bl0:出厂的时候就固化在irom中一段代码,主要负责拷贝8kb的bl1到s5pv210的一个96kb大小内部sra m(Internal SRAM)中运行。
值得注意的是s5pv210的Internal SRAM支持的bl1的大小可以达到16kb,容量的扩增是为了适应bootloder变得越来复杂而做的。
虽然如此,但目前我们制作出来的bl1的大小仍然可以保持在8kb以内,同样能满足需求。
bl1:u-boot的前8kb代码(s5pv210也支持16kb大小,原因上一点提过了),除了初始化系统时钟和一些基本的硬件外,主要负责完成代码的搬运工作(我设计成搬运bl1+bl2,而不仅仅是bl2),也就是将完整的u-boot代码(bl1+bl2)从nand flash或者mmcSD等的存储器中读取到内存中,然后跳转到内存中运行u-boot。
bl2:完成全面的硬件初始化和加载OS到内存中,接着运行OS。
上述几个阶段的流程描述在s5pv210_irom_application手册中有详细描述。
见下图1:图11.2 首先把启动部分的代码分为3部分,以start.S为主,另外还有lowlevel_init.S,mem_setup.S,ctr0.S。
其中lowlevel_init.S主要是一部分硬件的初始化,尤其是系统时钟和DRAM 的初始化。
如果u-boot一旦被搬运到内存中运行,那么是必须要跳过时钟和DRAM的初始化的,因为这在搬运之前已经做过了。
并且如果代码在内存中运行的时侯你却去初始化DRAM,那必然导致崩溃!mem_setup.S:DRAM初始化代码和MMU相关代码放在这个文件中。
ctr0.S:u-boot自带的代码文件,存放汇编函数main。
1.3 启动代码相关的几个文件在u-boot中的路径start.S: /arch/arm/cpu/armv7/start.S (需要自己修改)lowlevel_init.S:/board/samsung/zsy210/ lowlevel_init.S (需要自己修改)mem_setup.S: /board/samsung/zsy210/ mem_setup.S (u-boot没有,需要自己添加)ctr0.S: /arch/arm/lib/ctr0.S (u-boot自带,一般不需要修改)2. 启动过程原理必须要明白的一点是,当代码从存储介质(nand flash,SD,norflash,onenand等)中搬运到了DRAM中后随即会跳转到内存中运行u-boot,接着会有一个重定位(relocate_code)的过程,relocate_code子函数在start.S中,而给relocate_code子函数传参数的是crt0.S中的main子函数。
当判断到当前u-boot 在内存的低地址处,那么relocate_code就会工作,把u-boot代码从低地址处再搬运到内存地址的顶端,然后跳转到新的位置去继续运行u-boot。
而搬运的目标地址是在board_init_f()函数(此函数在/arch/arm/lib/board.c中)中计算出来的,见图2。
图2下面,以start.S为主线,画出了其程序流程图,图中同样也表现出启动的整个流程和启动代码文件间的组织关系。
所以后面直接贴出start.S的完整代码,大家结合流程图相信都可以看明白,至于逐句汇编的分析不是本文的重点。
见图3.图35.代码注释relocate_done://搬迁完成1.2.3.bx lr //即跳转到lr中存放的地址处。
4.5._rel_dyn_start_ofs:/* r2 <- rel dyn start ofs *///r2=0x64854(反汇编)6..word __rel_dyn_start -_start/* r2 <- rel dyn start ofs *///r2=0x64854(反汇编)7._rel_dyn_end_ofs:/* r3 <- rel dyn end ofs *///r3=0x6d104(反汇编)8..word __rel_dyn_end - _start9._dynsym_start_ofs:/* r10 <- sym table ofs *///r10=0x6d104(反汇编)10..word __dynsym_start - _start11.ENDPROC(relocate_code)12.13.#endif//预编译14.15.ENTRY(c_runtime_cpu_setup)//进入CPu启动16./*17. * If I-cache is enabled invalidate it18. */19.#ifndef CONFIG_SYS_ICACHE_OFF //结束预编译mcr p15, 0, r0, c7, c5, 0 @ invalidate icache//ARM的协处理命令20.mcr p15, 0, r0, c7, c10, 4 @ DSB//ARM的协处理命令21.mcr p15, 0, r0, c7, c5, 4 @ ISB//ARM的协处理命令22.23.#endif//预编译24./*25. * Move vector table//移动向量表26. */27.#if !defined(CONFIG_TEGRA20)//结束预编译28./* Set vector address in CP15 VBAR register */29.ldr r0, =_start//从内存中读出30.add r0, r0, r9 //三项相加31.mcr p15, 0, r0, c12, c0, 0 @Set VBAR//协处理32.#endif /* !Tegra20 *///结束预编译33.34.bx lr//跳转到lr35.36.ENDPROC(c_runtime_cpu_setup)//cpu开始37.38./*************************************************************************39. *40. * void save_boot_params(u32 r0, u32 r1, u32 r2, u32 r3)//无效启动参数保存41. * __attribute__((weak));42. *43. * Stack pointer is not yet initialized at this moment//堆栈指针尚未初始化44. * Don't save anything to stack even if compiled with -O0//不保存任何堆栈即使编译45. *46.*************************************************************** **********/47.ENTRY(save_boot_params)//48.bx lr @ back to my caller49.ENDPROC(save_boot_params)//保存引导50..weak save_boot_params //51.52./************************************************************心得体会这次实验让我认识到了自己的不足。
还有许多可以改进。
看门狗定时器编程播放儿歌小二郎,对音乐节拍的把控不足,还有对程序延时的理解,使我走了很多弯路,但是也让我学习到了很多新东西。