一种基于带噪声的三角网格模型的光顺算法
基于Laplace算子的三维点云光顺去噪算法

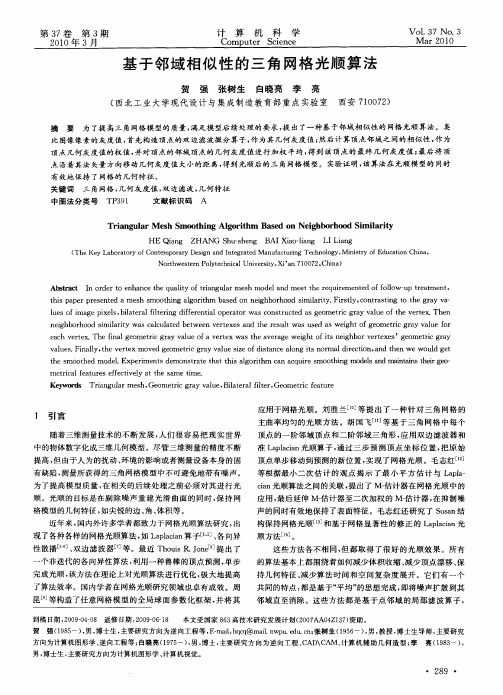
图 1-1 系统结构图
5
西安交通大学本科毕业设计(论文)
CAM11
CAM21
PRJ1
PRJ2 CAM12 CAM22
图 1-2 系统组成实物图
1.3 三维测量数据后处理研究现状
三维测量数据的得到的即是大量散乱点云数据,它没有数据结构排列无序。对三 维测量数据的后处理研究主要集中在数据获取、去噪光顺、特征提取、非均匀采样、 曲面重建等方面。以下是其部分研究现状的简要介绍。 目前三维点云的去噪光顺算法已经得到广泛的研究,主要分为两大类:基于三角 网格模型的算法和基于散乱点云模型的算法。基于三角网格模型的去噪光顺算法已经 获得广泛研究,从算法的复杂性分类可以分为基于最优化方法、Laplacian 算法、简单 的非迭代算法;根据噪声的扩散方式和特征保持性可分为各向异性算法和各向同性算 法。 通过各种设备获得的三维点云数据都存在大量的冗余点,这对后续处理带来很大 不便。因此需要通过特征提取,在保证点云模型的基本形状基础上对点云进行简化, 以及后续处理,大大提高了处理精度和速度。另外,提取的特征还可以用于识别比如 人脸识别等。目前应用比较广泛的特征提取算法主要是针对三角网格模型,很多特征 提取算法都是利用移动最小二乘法(MLS)曲面重建算法寻找特征点。Daniels[1]等在 重建出的 MLS 曲面中提取特征曲线,该算法鲁棒性较好;Pauly[2]等提出了采用 PCA 分析,利用邻域点建立协方差矩阵的特征值,在局部区域里计算曲面变化确定特征点, 该方法准确性高,但计算量较大;还有一种算法是用分段 MLS 曲面构建尖锐特征来提 取特征区域。
I
西安交通大学本科毕业设计(论文)
II
目
录
目
录
1 绪论 ...................................................................................................................................... 4 1.1 论文研究背景 ................................................................................................................ 4 1.2 三维测量数据的获取 .................................................................................................... 4 1.3 三维测量数据后处理研究现状 .................................................................................... 6 1.4 本论文主要研究工作 .................................................................................................... 6 2 三维测量数据去噪光顺综述 .............................................................................................. 8 2.1 基于最优化的方法 ........................................................................................................ 8 2.2 简单的非迭代方法 ........................................................................................................ 8 2.3 基于 LaPlace 算子的方法 ............................................................................................. 8 3 点云权重模糊 C 均值聚类和 Laplace 算法结合的光顺去噪算法 ................................... 9 3.1 点云权重模糊 C 均值聚类去噪算法 ........................................................................... 9 3.2 基于 LaPlace 算子光顺算法 ....................................................................................... 10 3.3 结果分析 ...................................................................................................................... 12 4 结论与展望 ........................................................................................................................ 14 4.1 结论 .............................................................................................................................. 14 4.2 展望 .............................................................................................................................. 14 参考文献 ................................................................................................................................ 16
复杂三角网格模型分治加工刀具轨迹生成

复杂三角网格模型分治加工刀具轨迹生成1. 引言介绍复杂三角网格模型在工业中的广泛应用,并指出其制造的复杂性和困难性。
提出使用分治算法和加工刀具轨迹生成算法来解决这些问题。
2. 相关工作综述当前广泛应用的CAD/CAM工具和算法,介绍复杂三角网格模型的分割方法、刀具路径生成算法。
3. 分治加工刀具轨迹生成算法提出分治算法的流程,分为分割和轨迹生成两部分,详细介绍从分割到轨迹生成的具体实现方法。
4. 实验结果使用该算法对一些复杂三角网格模型进行加工路径生成,并对结果进行分析。
验证了该算法在加工效率和加工质量上的优越性。
5. 结论总结本文所提出的复杂三角网格模型分治加工刀具轨迹生成方法的优势和局限性,并展望未来的研究方向,探讨进一步提高加工效率和质量的可能性。
第一章节:引言在现代工业领域,复杂三角网格模型的应用范围非常广泛。
这些模型可以用于各种不同的应用领域,如汽车工程、航空航天、医疗器械等领域的设计和制造。
然而,与其它传统的造型技术相比,复杂三角网格模型的制造复杂度和困难度要高得多。
特别是在计算机辅助设计和制造(CAD/CAM)的流程中,复杂三角网格模型的切削路径规划和工艺规划更是具有挑战性。
等离散化的三角形,作为现代三维CAD/CAM操作的基础,因其表征足够全面,规模又比例子集的四边形与三角剖分问题研究重要。
复杂三角网格模型是由许多小三角形的组合构成的,因此其表面特征非常复杂。
这使得制造该模型的工艺显得尤为困难,特别是对于高精度加工的工艺流程更是如此。
当前的CAD/CAM处理可应对只有数千个三角形的模型。
对于大规模的复杂三角网格模型,则暂时没有完全解决方案。
针对这一挑战,本论文提出了一种复杂三角网格模型分治加工刀具轨迹生成方法。
该方法基于分治算法和加工刀具轨迹生成算法,能够有效地处理大规模复杂三角网格模型的加工路径生成问题。
本论文结构如下:第二章介绍相关工作,包括当前广泛应用的CAD/CAM工具和算法以及复杂三角网格模型的分割方法和刀具路径生成算法。
基于邻域相似性的三角网格光顺算法
Ab t a t I r e o e h n e t e q a i ft in u a s d la d me tt er q i m e t d o o l w- p te t n , sr c n o d rt n a c h u l y o ra g lrme h mo e n e h e u r t e ne f l f o u r a me t t i p p r p e e t d a me h s o h n l o i m a e n n ih o h o i l rt . is l c n r s i g t h r y v — h s a e r s n e s mo t i g ag rt h b s d o eg b r o d smi iy F r t a y, o t a t o t e g a a n l e fi g i es b lt r lf t rn if r n il p r t r wa o s r c e s g o e r r y v l e o h e t x Th n u so ma e p x l , i e a i e i g d fe e t e a o s c n tu t d a e m ti g a au ft e v re . e a l ao c n i h o h o i lrt s c lu a e e we n v r e e n h e u t s u e sweg to e me rcg a a u o e b r o d smi i wa a c l t d b t e e t x s a d t e r s l wa s d a i h fg o ti r y v l e f r g a y e c e t x Th i a e me rcg a au fa v r e st ea e a e weg t fi e h o e t x s e me rc g a a h v re . ef l o n g ti r y v l e o e t x wa h v r g i h s n i b rv r e e ’g o t i r y o t g v l e . n l , h e t x mo e e me rcg a a u ie o it n e ao g i o r a ie t n, n h n wewo l e a u s Fi al t e v re v d g o t i r yv l e sz fd s a c l n t n r l r c i a d t e u d g t y s n d o t e s o h d mo e. p r n sd mo s r t h tt i ag rt a c u r mo t i g mo es a d man an h i g o h mo t e d 1 Ex e i me t e n ta e t a h s lo ih c n a q ie s o h n d l n i ti st er e - m
保特征的加权最小二乘三角网格光顺算法

q a r t b e t ef n t n b s d o h se e g smi i z d b o vn p re l e rs se t e u d ai o jci u c i a e n t i n r y i c v o nmie y s lig a s a s i a y tm o g t n
最 小 二 乘 思 想 的 保 特 征 网格 光 顺 算 法 . 首先 提 出 一个 关 于 光顺 后 网 格 顶 点 或 者 法 向 的离 散 二 次 能 量 函 数 , 能量 一 该
方 面 满 足 光 顺 后 的 网 格 在 除 特 征 点 外 的 地 方 处 处 光 滑 的 同 时 , 满 足 光 顺 后 网格 与 原 噪 声 网 格 尽 可 能 相 似 ; 后 对 还 然
关 键 词 : 角 网格 ; 三 光顺 ; 权 最 小 二 乘 ; 特 征 ; 向 加 保 法
中 图 法 分 类 号 :TP3 1 9
Fe t r r s r i M e h a u e p e e v ng s S o t n Al o ihm Ba e o t W e g t d m o hi g g rt sd n he i h e Le s at
保特征的网格光顺算法
v rcs codn edsacs ewencr n et n daet e i sa dteage ew e e oma o r n 、r xado daet et e crigt t i n e t e ur t r xa dajcn rc , n n ls t ent r l f ur t t n f jcn i a oh t b e v e vt e h b hn c e ee a
率流 算 法 以 及 T u i a bn的 方法 J 普 拉 斯 光顺 是 一种 。拉 最简 单 的 光 顺算 法 ,它 对 所 有 噪声 使 用 统 一 的 流 形 ,在 空 问
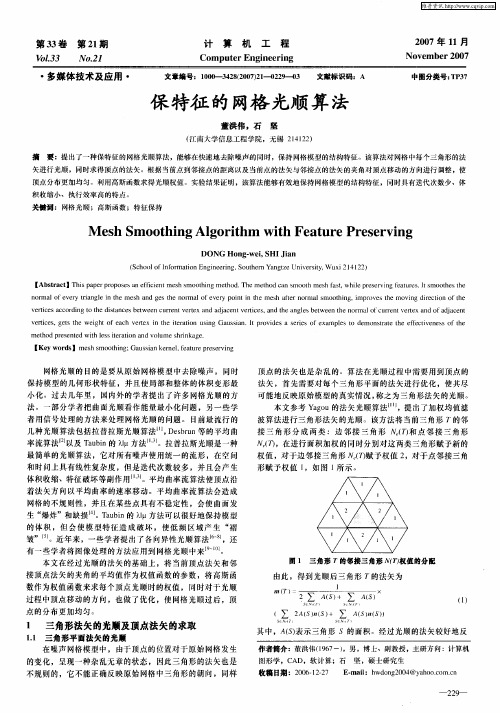
波算法进行三角形法矢的光顺 。该方法将当前三角形 7的邻 1
接 三 角 形 分 成 两 类 : 边 邻 接 三 角 形 N ( 和 点 邻 接 三 角 形 3
・
计
算
机
工
程
20 0 7年 1 1月
No e b r2 0 v m e 0 7
No 2l .
Co put rEng n e i m e i e rng
多媒体 技术及 应用 ・
文 章编号:lo 32( o) — J9一3 文 o 48 07 l 2 — J 2 2一 2 献标识码:A
me h d p e e t d wi s e a i n a d v l me s rn g . t o r s n e t l si r t n o u h i ka e h e t o
[ ywo d ]mehs ohn ; a sin enlfa r rsrig Ke r s s mo tig G us re,et epeevn ak u
N ( ,在进行面积加权 的同时分别对这两类三角形赋予新 的 权值 , 于边邻接三角形 ( 赋予权值 2 对 3 7 ,对于点邻接三 角 形赋 予权值 1 ,如图 1 所示 。
基于点云数据的去噪算法研究

第 5期
长
沙
大
学
学
报
VO 1 . 2 7 NO . 5
2 0 1 3年 9月
J OURNAI _OF CHANGSHA UNI VERSI T Y
Se 9.2 0 1 3
基 于 点 云数 据 的去 噪算 法 研 究
陈崇帮 , 欧新 良 , 唐 伟 , 李 琦。
( 1 . 湖南工业大学计算机与通信学院 , 湖南 株洲 4 1 2 0 0 7; 2 . 长沙大学计算机科学与技术系 , 湖南 长沙 4 1 0 0 2 2 ; 3 . 国防科技大学信息 中心 , 湖南 长沙 4 1 0 0 7 3 ) 摘 要: 阐述 了点云数据 的去噪 方法的研 究情 况, 并对几种 经典 的去噪 算法进行 了介 绍分析 , 对其优 缺点进行 了总结. 通
应用到点模 型上 , 比较具 有代表性 的有 F l e i s h m a n等人 基
于双边滤波 函数 提 出的去 噪算 法. F l e i s h ma n等人 汲取 了在 图像 处理中双边滤波去噪函数的思想 , 提 出了具有特征保 持
性的基于网格模型的去噪算 法 ; 该算法不 需要详细 的拓 扑信 息, 因此 能够应用到点模型上. P a u l y等 人先获取点模 型表 面数据并且根据表面的数据 信息将 表面分成块 , 随后再对 每
一
网格模 型的光顺 中 , 并设计了一种基于信号处 理的三角 网格 光顺方法. L a p l a c e算法思想 是通过算 子 的多次迭代 , 一步 一
块表面通过局部逼近的方法进行再次采样 , 其 中就 运用 了
收 稿 日期 : 2 0 1 3— 0 5— 2 0
三角网格的参数化
2) ( 浙江大学计算机科学与技术学院 杭州 310027)
3) ( 浙江大学数学系 杭州 310027)
摘 要 参数化变形的大小是衡量参数化好坏的标准 基于这个标准, 分别从 平面参数域和 球面参数域 对各种参 数 化方法的保面积性、保角性和等距性进行深入的讨 论, 并从算法的理 论基础、运算时间 复杂度、适用范围 和数值实 现 方法等方面作了详细的比较和论述 最后, 结合作者在本领域的研究 工作, 对参数化方法的研究趋势作了一个展望
关键词 三角网格; 参数化; 变形; 综述 中图法分类号 T P391
Survey on Parameterization of Triangular Meshes
Peng Q unsheng1, 3) H u Guofei1, 2)
1) ( St ate K ey L aboratory of CA D & CG , Zhej i ang U niv ersity , H angz hou 310027) 2) ( Coll ege of Comp ut er S cience , Zhej iang Uni ver si ty, H a ngz hou 310027) 3) ( D epart ment of M athemat ics, Zhej i ang U niv ersity , H angzhou 310027)
7 32
计算机辅助设计与图形学学报
2004 年
实际上, 三角网格参数化可归结为这样一个问
题: 给定一个由空间点集 Pi R 3 组成的二维流形三
角网格 M = { T j } 和一个二维流形参数域 p , 寻求
一个在参数域上的点
P
* i
p 到 Pi M 的一一映
基于三角Bezier曲面的三角网格模型光顺算法
; u a a s pi d o—no lb e e -e i e sutetr, n r tg h w o s c W m le nuir y a d n h R Sten x tc r;i c su i e hl f r es i f n f m s o t r d r u hd o tcn t e{ ;G tagl desrc cri o eifa rot m le oe,h hm ksh i - 2 r u aBz ruae od gtg m tcet e h s pi dm dl i ae t ta i n r i f a c n oe r u ei f f wc e rn }gl 6i r eh o i frne Uaefr ,og e a u i t o tnh di u a Bzrua e m tn re c Sr ;ot t uhh l l o o h pi e z r《 r esf t s h ge e f c o c hh t c c a n e no t B e t f
机 械 设 计 与 制 造
1 2
第1 0期
21 0 2年 1 0月
Ma h n r De i n & c ie y sg
Ma u a t r n f cu e
文章编号 :0 1 3 9 ( 0 2 1 — 0 2 0 10 — 9 7 2 1 )0 0 1 — 3
基 于三 角 B z r 6i 曲面的三角网格模型光顺 算法 e 木
;sotn grh i gl ehsrc r o dw i c dsort s m, t o g a m o i a ot otau a m s f eipo s ,h hi l efu sp. £ o l i l{ h g l imf r n r ua s p e c n u e t p o c i ; tc r o e s sr e a o aidb e 术- e i e su u ; cn, e r gl e sut e t h ua s r n e y h R S ten x t c r s od£ i u a m s i r u h m f w g z t f e c r d r t e e t n a r h
高效率的三角网格模型保特征简化方法
高效率的三角网格模型保特征简化方法段黎明;邵辉;李中明;张桂;杨尚朋【摘要】Considering that some triangular mesh models are inconvenient for storage,analysis and display due to enormous data volume,a simplification algorithm for triangular collapsed mesh combining with mesh refinement was put forward.In this method,the modified coordinates for three vertexes of the triangle to be collapsed were determined by using the √3 surface subdivision method,and the position of the folding point was preliminarily determined in accordance with the modified coordinates;then the Laplacian coordinate of the folding point and normal information of the original triangle were introduced to update the folding point position;finally,the collapse cost was caculated based on volume error of the area after triangle collapse and flatness of the collapsed triangle,thus enabled the mesh to preferentially carry out collapse simplification from relatively flat area with few feature points.Experimental test and data analysis were established in multiple models,and result indicates that the method can effectively simplify the mesh pared with three simplification methods of different types,the method can achieve the highest simplification efficiency,and can,at the sametime,effectively maintain geometric characteristics of the mesh model and control quality of the simplified triangle.%部分三角网格模型因数据量庞大而导致其不便于存储、分析和显示,本文提出了一种结合网格精细化方法的三角形折叠网格简化算法以解决此问题.首先通过/3网格细分法确定待折叠三角形三个顶点的修正坐标,并根据修正坐标初步确定折叠点位置,然后引入折叠点的拉普拉斯坐标和原三角形法向信息来更新折叠点位置,最后由三角形折叠后该区域的体积误差和被折叠三角形的平展度共同确定折叠代价,从而使网格优先从较为平坦和特征点较少的区域开始依次进行三角形折叠简化.对多个模型进行了实验测试和数据分析,结果表明该方法能够有效精简网格数据,与3个不同类型的简化方法相比,该方法的简化效率最高,而且能有效保持原网格模型的几何特征并控制简化三角形的质量.【期刊名称】《光学精密工程》【年(卷),期】2017(025)002【总页数】9页(P460-468)【关键词】网格简化;三角形折叠;拉普拉斯坐标;√3细分法【作者】段黎明;邵辉;李中明;张桂;杨尚朋【作者单位】重庆大学光电技术及系统教育部重点实验室ICT研究中心,重庆400044;重庆大学机械工程学院,重庆400044;重庆大学光电技术及系统教育部重点实验室ICT研究中心,重庆400044;重庆大学机械工程学院,重庆400044;重庆大学光电技术及系统教育部重点实验室ICT研究中心,重庆400044;重庆大学机械工程学院,重庆400044;重庆大学光电技术及系统教育部重点实验室ICT研究中心,重庆400044;重庆大学机械工程学院,重庆400044;重庆大学光电技术及系统教育部重点实验室ICT研究中心,重庆400044;重庆大学机械工程学院,重庆400044【正文语种】中文【中图分类】TH703三角网格模型在快速成型、3D打印、模型仿真等领域的应用十分广泛[1,2],但其数据量往往十分庞大,这虽然可以很好地保持物体的细节特征,却不便于数据的计算、展示、存储和传输。
mimics软件介绍
MIMICS软件介绍MIMICS是一套高度整合而且易用的3D图像生成及编辑处理软件,它能输入各种扫描的数据(CT、MRI),建立3D模型进行编辑,然后输出通用的CAD(计算机辅助设计)、FEA(有限元分析),RP(快速成型)格式,可以在PC机上进行大规模数据的转换处理。
MIMICS FEA 模块MIMICS FEA模块可以将扫描输入的数据进行快速处理,输出相应的文件格式,用于FEA (有限元分析)及CFD(计算机模拟流体动力学),用户可用扫描数据建立3D模型,然后对表面进行网格划分以应用在FEA分析中。
FEA模块中的网格重新划分功能对FEA的输入数据进行最大限度的优化,基于扫描数据的亨氏单位,可以对体网格进行材质分配。
在MIMICS中通过点云数据建立一个3D模型。
在FEA模块中,使用MIMICS的网格重划功能对3D模型网格进行重新划分。
在FEA模块下输出到Patran Neutral,Ansys 及Abaqus surface等FEA软件。
将表面网格转换成体网格用于前处理(e.g.MSC,Marc,…)在FEA模块中输入Patran,Ansys,Abaqus体网格文件。
在FEA模块中基于扫描数据对体网格进行材质分配。
在FEA模块中输出材质分配后的体网格到Patran,Ansys,或Abaqus等FEA软件中。
MIMICS网格重划功能:MIMICS的网格重划功能能显著提高STL模型的质量和处理速度,能方便地将不规则三角片转化成趋近于等边的三角片。
在进一步的自动重划功能里,能进行更加专业的半自动或手动划分,以便更好地进行FEA分析。
更多的质量控制参数:MIMICS网格重划功能提供多达14种通用的质量控制参数,用户可以选取合适的方法来计算三角片的质量。
简便的自动网格重划功能:网格重划功能可以自动地提高三角片的质量,它搜索所有在预先设置的质量水平之下的不好的三角片,再把它们转化到可接受的形状。
手动网格重划:在个别情况下,进行自动网格重划后仍有三角片质量低于要求,那么我们可以用手动的方法进行网格重划,网格重划功能提供独特的工具箱来手动修改它们的形状。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
rt m a e n me n s i . F rt tc mp td t e n r lo e v  ̄ x r b sl c o d n o t e f t r d n r lo r n ls i h b s do a hf t is ,i o ue h oma ft e e o u t a c r i g t h i e e oma ft a g e . h y l i Te h n,i u e h a h f a p o c o a q i e n ih o h o ft e v re d p iey i al ,i i r v d t e bl trl t s d t e me n s i p r a h t c u r t e g b r o d o et x a a t l .F n l t eh h v y t mp o e i e a h a f t rt n o p r t e mer e t r i lrt f h e x a d t e mo e ss oh d atru d t gt e p st n o e v r i e o i c r o a e g o t c f au e s l i mi i y o ev  ̄e n h d l a t wa mo t e f p ai o i o ft e — e n h i h
第2 9卷第 9期
21 0 2年 9 月
计 算 机 应 用 研 究
Ap l a in Re e r h o mp tr p i t s a c fCo u e s c o
Vo . 9 No 9 12 .
Sp e .2 1 02
一
种基 于 带 噪声 的三 角 网格 模 型 的光顺 算 法 术
关键词 :均值 漂移 ;光顺 ;双边 滤波 算子 ; 角 网格 三 中图分 类号 :T ̄0 . I 16 文献标 志码 :A 文章 编号 :10 — 6 5 2 1 )9 3 0 —3 0 13 9 ( 0 2 0 .3 9 0
d i1 .9 9 ji n 10 — 6 5 2 1 . 9 0 9 o:0 3 6 /.s . 0 1 39 . 0 2 0 . 2 s
网格连接 , 而产生新的缺陷 。各 向异性散播算法将图像 中的 从
0 引言
三角 网格模型通 常是 由三维 测量设 备获 得的散乱 点集 重
建 而 成 。 随 着 三 维 测 量 技 术 的不 断发 展 , 们 很 容 易 把 现 实世 人
各 向异性去噪思想运用 到三 角网格模 型上 , 获得 了较好的特征 保持效果 , 算法复杂度高且对模型体积保持的效果较差。与 但 各向异性散播算法所不 同的是 , 双边 滤波算法是邻 域顶点的加 权平均 , 这里 的权值不仅 与顶点 间 的空 间位置有 关 , 而且还 与
tx. Th x e m e tr s lss w h tag rt e ee p r i n e ut ho t a l o hm sef cie. Th e o hs i i fe t v e us ft i wih nos nd ke p s me o gna h r ce itc ft e mo 1. t iea e o r i lc a a trsis o h de i
点 的邻域 。 结合顶 点 间几何特 征 的相似 性 , 改进 后 的双 边 滤波 算子 应 用 于顶 点 的位 置 更新 , 而 完成模 型的 将 从
光顺 。 实验 结 果证 明 了网格光 顺算 法的有 效性 。利 用这 种 网格 算 法 , 可以达 到光顺 带噪 声的 三 角 网格 模 型 的 目 的, 并在 光顺 的 同 时, 有效 地保持 了模 型 中原有 的特征 。
S o h n l o i m a e n ti n l s t o s mo t i g a g rt h b s d o ra g e me h wi n ie h
ZHAO Ye,ZH AIS ime h- i
(. colfSi c , ia n esyo  ̄cn l w l X ’ n7 0 3 ,C ia; . ’nHg —ehRsac ntue ia 105,C ia 1Sho c ne X ’ nU ir t f o e v i hoo a , ia 10 2 hn 2Xi。 ih Tc e r g e hIstt,X ’ n7 02 i hn )
A b t a t: I r e o fle he n ie i ra ulrme h mo l hi p rpr s n e e t epr s ri g me h s o hnga g — sr c n o d rt t rt os n t ng a s de ,t spa e e e td a faur e ev n s mo t i lo i i
赵 晔 ,翟世梅
( .西安 工业 大 学 理 学院 ,西安 7 0 3 ; .西安 高科技研 究所 ,西安 7 0 2 ) 模型 中的噪 声 , 出了一种基 于均值 漂 移的特 征保持 的 网格光 顺 算 法。该 方法在 对 提
模 型 中的三 角形 的法 向量进 行滤 波的基 础上 鲁棒地 计 算 了顶 点 的法 向量 , 利用 均值 漂移方 法 自适应 地聚 类 出顶
.
d ag rt m a m o t ra g a s d l lo h c n s o h t n ulrme h mo e i i
Ke r y wo ds: me n s f ;s o hng;b lt rlfle ig o rt r ra g a s a hi t mo t i iae a it rn pea o ;t n ulrme h i