模拟量信号控制伺服电机
模拟量信号控制伺服电机
什么叫“零漂”,及如何解决“零漂”现象?
零点漂移可描述为:输入电压为零,输出电压偏离零值的变化。它又被简称为:零漂。
零点漂移是怎样形成的: 运算放大器均是采用直接耦合的方式,我们知道直接耦合式放大
电路的各级的 Q 点是相互影响的,由于各级的放大作用,第一级的微弱变化,会使输出极
产生很大的变化。当输入短路时(由于一些原因使输入级的
在实验过程中,当模拟量输入 0v 时,电机并没有发生偏移现象。但是,我在试 验手册里还是找到了相关参数。
W 伺服对应“零漂”调整参数
Pn314=250 ( S 曲线加减速时间 250ms )
4. 实验过程
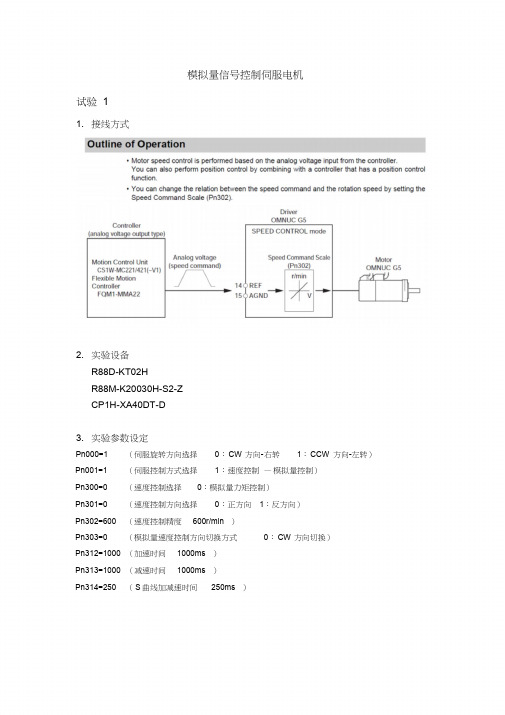
使用 CP1H-XA40DT-D 的模拟量输出功能,使用 模拟量与速度对应关系如下图所示:
G5 模拟量速度控制功能。 Nhomakorabea在实验过程中,发现当模拟量输入为 0v 时,电机以一个很缓慢的速度向 CW 方向旋转,即 发生了“零漂”现象。 在闭环控制中,“零漂”现象对精度的控制有一定的影响,需要抑制住“零漂”现象。
Q 点发生微弱变化,比如:温
度),输出将随时间缓慢变化,这样就形成了零点漂移。 解决“零漂” 最有效的方式: 随着三极管的导通工作, 其温度会上升, 导致扩散运动加剧 Ic、
Ie 电流增大,随之 Re 两端电压增大, Vbe 的电压就减小, Ib 也随之减小,从而使 Ic 减小, 形成了负反馈,这就是其抑制零漂的原理。
试验 1
1. 接线方式
模拟量信号控制伺服电机
2. 实验设备 R88D-KT02H R88M-K20030H-S2-Z CP1H-XA40DT-D
3. 实验参数设定
Pn000=1 (伺服旋转方向选择 0: CW 方向-右转 1: CCW 方向-左转)
伺服电机的三种控制方法

速度环主要进行PI(比例和积分),比例就是增益,所以我们要对速度增益和速度积分时间常数进行合适的调节才能达到理想效果。。。
位置环主要进行P(比例)调节。。。对此我们只要设定位置环的比例增益就好了。。。
位置环、速度环的参数调节没有什么固定的数值,要根据外部负载的机械传动连接方式、负载的运动方式、负载惯量、对速度、加速度要求以及电机本身的转子惯量和输出惯量等等很多条件来决定,调节的简单方法是在根据外部负载的情况进行大体经验的范围内将增益参数从小往大调,积分时间常数从大往小调,以不出现震动超调的稳态值为最佳值进行设定。。。
4、谈谈3环。伺服电机一般为三个环控制,所谓三环就是3个闭环负反馈PID调节系统。最内的PID环就是电流环,此环完全在伺服驱动器内部进行,通过霍尔装置检测驱动器给电机的各相的输出电流,负反馈给电流的设定进行PID调节,从而达到输出电流尽量接近等于设定电流,电流环就是控制电机转矩的,所以在转矩模式下驱动器的运算最小,动态响应最快。
1、转矩控制:转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,具体表现为例如10V对应5Nm的话,当外部模拟量设定为5V时电机轴输出为2.5Nm:如果电机轴负载低于2.5Nm时电机正转,外部负载等于2.5Nm时电机不转,大于2.5Nm时电机反转(通常在有重力负载情况下产生)。可以通过即时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现。应用主要在对材质的受力有严格要求的缠绕和放卷的装置中,例如饶线装置或拉光纤设备,转矩的设定要根据缠绕的半径的变化随时更改以确保材质的受力不会随着缠绕半径的变化而改变。
伺服控制系统的4种控制方式

伺服控制系统的4种控制方式导语:伺服控制系统的3种控制方式,速度控制和转矩控制,位置控制。
伺服控制系统的3种控制方式,速度控制和转矩控制,位置控制基础知识一、伺服系统组成(自上而下)控制器:plc,变频器,运动控制卡等其他控制设备,也称为上位机;伺服驱动器:沟通上位机和伺服电机,作用类似于变频器作用于普通交流马达。
伺服电机:执行设备,接受来自驱动器的控制信号;机械设备:将伺服电机的圆周运动(或直线电机的直线运动)转换成所需要的运动形式;各类传感器和继电器:检测工业控制环境下的各种信号送给上位机或驱动器做为某些动作的判断标准。
二、伺服控制方式三种控制方式:速度控制方式,转矩控制方式,位置控制方式。
速度控制和转矩控制都是用模拟量来控制的,位置控制是通过发脉冲来控制的。
▶如果您对电机的速度、位置都没有要求,只要输出一个恒转矩,当然是用转矩模式。
▶如果对位置和速度有一定的精度要求,而对实时转矩不是很关心,用速度或位置模式比较好。
▶如果上位控制器有比较好的闭环控制功能,用速度控制效果会好一点。
▶如果本身要求不是很高,或者基本没有实时性的要求,用位置控制方式对上位控制器没有很高的要求。
就伺服驱动器的响应速度来看,转矩模式运算量最小,驱动器对控制信号的响应最快;位置模式运算量最大,驱动器对控制信号的响应最慢。
对运动中的动态性能有比较高的要求时,需要实时对电机进行调整。
如果控制器本身的运算速度很慢(比如PLC,或低端运动控制器),就用位置方式控制。
如果控制器运算速度比较快,可以用速度方式,把位置环从驱动器移到控制器上,减少驱动器的工作量,提高效率;如果有更好的上位控制器,还可以用转矩方式控制,把速度环也从驱动器上移开,这一般只是高端专用控制器才能这么做。
一般说驱动器控制的好坏,有个比较直观的比较方式,叫响应带宽。
当转矩控制或速度控制时,通过脉冲发生器给它一个方波信号,使电机不断的正转、反转,不断的调高频率,示波器上显示的是个扫频信号,当包络线的顶点到达最高值的70.7%时,表示已经失步,此时频率的高低,就能说明控制的好坏了,一般电流环能做到1000HZ 以上,而速度环只能做到几十赫兹。
伺服电机的三种控制方式有哪些
伺服电机是在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。
在不同场景下,伺服电机的控制方式各有不同,在进行选择之前你需要先了解伺服电机是三种控制方式各有其特点,下面小编就给大家介绍一下伺服电机的三种控制方式。
伺服电机控制方式有脉冲、模拟量和通讯控制这三种1、伺服电机脉冲控制方式在一些小型单机设备,选用脉冲控制实现电机的定位,应该是最常见的应用方式,这种控制方式简单,易于理解。
基本的控制思路:脉冲总量确定电机位移,脉冲频率确定电机速度。
都是脉冲控制,但是实现方式并不一样:第一种,驱动器接收两路(A、B路)高速脉冲,通过两路脉冲的相位差,确定电机的旋转方向。
如上图中,如果B相比A相快90度,为正转;那么B相比A相慢90度,则为反转。
运行时,这种控制的两相脉冲为交替状,因此我们也叫这样的控制方式为差分控制。
具有差分的特点,那也说明了这种控制方式,控制脉冲具有更高的抗干扰能力,在一些干扰较强的应用场景,优先选用这种方式。
但是这种方式一个电机轴需要占用两路高速脉冲端口,对高速脉冲口紧张的情况,比较尴尬。
第二种,驱动器依然接收两路高速脉冲,但是两路高速脉冲并不同时存在,一路脉冲处于输出状态时,另一路必须处于无效状态。
选用这种控制方式时,一定要确保在同一时刻只有一路脉冲的输出。
两路脉冲,一路输出为正方向运行,另一路为负方向运行。
和上面的情况一样,这种方式也是一个电机轴需要占用两路高速脉冲端口。
第三种,只需要给驱动器一路脉冲信号,电机正反向运行由一路方向IO信号确定。
这种控制方式控制更加简单,高速脉冲口资源占用也最少。
在一般的小型系统中,可以优先选用这种方式。
2、伺服电机模拟量控制方式在需要使用伺服电机实现速度控制的应用场景,我们可以选用模拟量来实现电机的速度控制,模拟量的值决定了电机的运行速度。
模拟量有两种方式可以选择,电流或电压。
电压方式,只需要在控制信号端加入一定大小的电压即可。
实现简单,在有些场景使用一个电位器即可实现控制。
PMAC多轴运动控制卡学习(硬件)
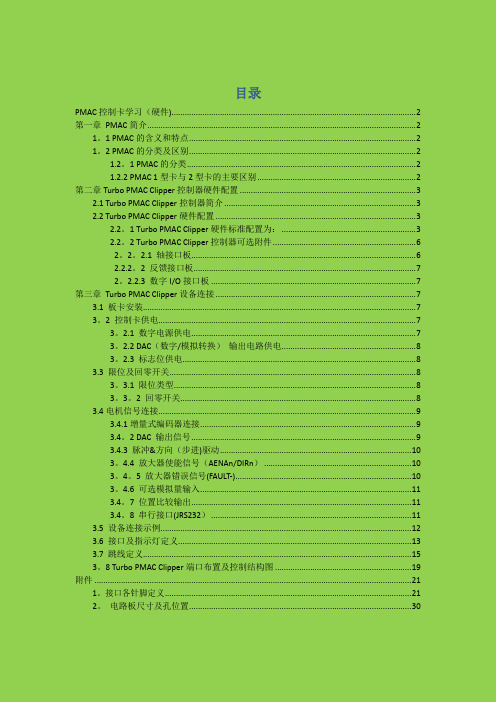
目录PMAC控制卡学习(硬件) (2)第一章PMAC简介 (2)1。
1 PMAC的含义和特点 (2)1。
2 PMAC的分类及区别 (2)1.2。
1 PMAC的分类 (2)1.2.2 PMAC 1型卡与2型卡的主要区别 (2)第二章Turbo PMAC Clipper控制器硬件配置 (3)2.1 Turbo PMAC Clipper控制器简介 (3)2.2 Turbo PMAC Clipper硬件配置 (3)2.2。
1 Turbo PMAC Clipper硬件标准配置为: (3)2.2。
2 Turbo PMAC Clipper控制器可选附件 (6)2。
2。
2.1 轴接口板 (6)2.2.2。
2 反馈接口板 (7)2。
2.2.3 数字I/O接口板 (7)第三章Turbo PMAC Clipper设备连接 (7)3.1 板卡安装 (7)3。
2 控制卡供电 (7)3。
2.1 数字电源供电 (7)3。
2.2 DAC(数字/模拟转换)输出电路供电 (8)3。
2.3 标志位供电 (8)3.3 限位及回零开关 (8)3。
3.1 限位类型 (8)3。
3。
2 回零开关 (8)3.4电机信号连接 (9)3.4.1增量式编码器连接 (9)3.4。
2 DAC 输出信号 (9)3.4.3 脉冲&方向(步进)驱动 (10)3。
4.4 放大器使能信号(AENAn/DIRn) (10)3。
4。
5 放大器错误信号(FAULT-) (10)3。
4.6 可选模拟量输入 (11)3.4。
7 位置比较输出 (11)3.4。
8 串行接口(JRS232) (11)3.5 设备连接示例 (12)3.6 接口及指示灯定义 (13)3.7 跳线定义 (15)3。
8 Turbo PMAC Clipper端口布置及控制结构图 (19)附件 (21)1。
接口各针脚定义 (21)2。
电路板尺寸及孔位置 (30)PMAC控制卡学习(硬件)第一章PMAC简介1.1PMAC的含义和特点1.PMAC的含义:PMAC是program multiple axis controller 可编程的多轴运动控制卡。
台达PLC与威纶触摸屏通讯控制3台伺服电机做扭矩控制。

接一个控制案子,要求测试产品有没有卡阻问题。
开始方案用台达32EH00T3加4DA模块用模拟量信号控制三个独立伺服,就是三个工位没工位动作相同。
扭矩模式。
但有个问题,解决了扭矩连续可变控制,速度的快慢问题却没有解决,有工艺要求。
速度也要控制。
再增加一个4DA模块可以解决,但是手头只有一个模块,就想出下面的解决方法:
改为三个伺服与触摸屏通讯,威纶触摸屏6071IE. 伺服接触摸屏COM2 MODBUS485通讯,COM1与台达PLC RS232通讯用户的扭矩与速度数据通过PLC与触摸屏做定时资料传输与伺服交换数据,达到控制伺服的目的,完美解决。
取消了两个4DA模块。
如何采用PLC控制伺服电机的精确定位
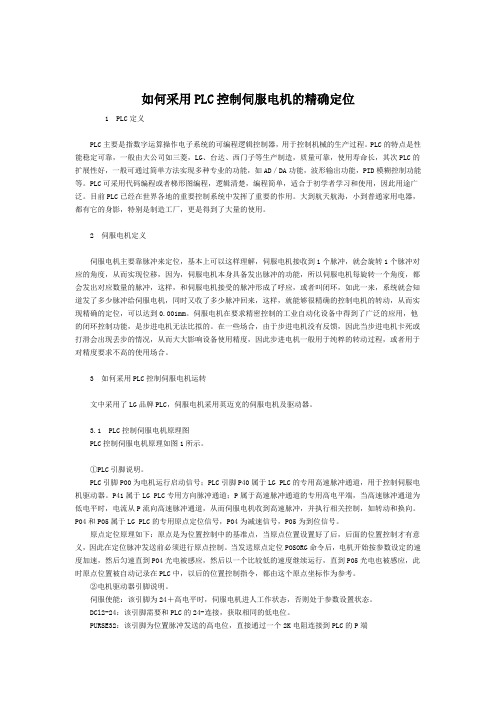
如何采用PLC控制伺服电机的精确定位1 PLC定义PLC主要是指数字运算操作电子系统的可编程逻辑控制器,用于控制机械的生产过程。
PLC的特点是性能稳定可靠,一般由大公司如三菱,LG、台达、西门子等生产制造,质量可靠,使用寿命长,其次PLC的扩展性好,一般可通过简单方法实现多种专业的功能,如AD/DA功能,波形输出功能,PID模糊控制功能等。
PLC可采用代码编程或者梯形图编程,逻辑清楚,编程简单,适合于初学者学习和使用,因此用途广泛。
目前PLC已经在世界各地的重要控制系统中发挥了重要的作用。
大到航天航海,小到普通家用电器,都有它的身影,特别是制造工厂,更是得到了大量的使用。
2 伺服电机定义伺服电机主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。
伺服电机在要求精密控制的工业自动化设备中得到了广泛的应用,他的闭环控制功能,是步进电机无法比拟的。
在一些场合,由于步进电机没有反馈,因此当步进电机卡死或打滑会出现丢步的情况,从而大大影响设备使用精度,因此步进电机一般用于纯粹的转动过程,或者用于对精度要求不高的使用场合。
3 如何采用PLC控制伺服电机运转文中采用了LG品牌PLC,伺服电机采用英迈克的伺服电机及驱动器。
3.1 PLC控制伺服电机原理图PLC控制伺服电机原理如图1所示。
①PLC引脚说明。
PLC引脚P00为电机运行启动信号;PLC引脚P40属于LG PLC的专用高速脉冲通道,用于控制伺服电机驱动器。
P41属于LG PLC专用方向脉冲通道;P属于高速脉冲通道的专用高电平端,当高速脉冲通道为低电平时,电流从P流向高速脉冲通道,从而伺服电机收到高速脉冲,并执行相关控制,如转动和换向。
1200plc 模拟量输出 数值范围

1200plc 模拟量输出数值范围(实用版)目录1.1200plc 概述2.模拟量输出的概念3.数值范围介绍4.1200plc 模拟量输出的应用正文一、1200plc 概述1200plc 是一款广泛应用于工业自动化领域的可编程逻辑控制器。
它具有性能稳定、可靠性高、扩展性强以及操作简便等特点,深受用户青睐。
在各种工业生产场景中,1200plc 都能发挥关键作用,实现对设备的精确控制和自动化运行。
二、模拟量输出的概念模拟量输出是 1200plc 的一个重要功能,指的是控制器通过模拟信号的方式,将数据传输给外部设备。
这种信号具有连续性,能够在一定范围内表示各种不同的数值。
与数字信号相比,模拟量输出可以提供更丰富的信息,适用于更广泛的应用场景。
三、数值范围介绍1200plc 的模拟量输出数值范围通常为 0-10V、0-20mA 或 4-20mA 等。
这些数值范围表示控制器可以产生的模拟信号的最大值和最小值。
不同的数值范围适用于不同的应用需求,用户可以根据实际需要进行选择。
四、1200plc 模拟量输出的应用1200plc 的模拟量输出功能在实际应用中具有广泛的用途,例如:1.控制伺服电机:通过模拟量输出,1200plc 可以精确控制伺服电机的转速、位置等参数,实现高精度的运动控制。
2.调节阀门:模拟量输出可以实现对阀门的开度进行精确控制,从而调节流体的流量、压力等参数,满足各种工况的需求。
3.检测传感器信号:1200plc 可以通过模拟量输出功能接收传感器的信号,如温度、压力、湿度等,实现对工业过程的实时监测。
总之,1200plc 的模拟量输出功能为工业自动化领域提供了强大的支持,使得各种设备和系统能够实现更高效、精确的运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
模拟量信号控制伺服电机
试验1
1.接线方式
2.实验设备
R88D-KT02H
R88M-K20030H-S2-Z
CP1H-XA40DT-D
3.实验参数设定
Pn000=1 (伺服旋转方向选择0:CW方向-右转1:CCW方向-左转)Pn001=1 (伺服控制方式选择1:速度控制—模拟量控制)
Pn300=0 (速度控制选择0:模拟量力矩控制)
Pn301=0 (速度控制方向选择0:正方向1:反方向)
Pn302=600 (速度控制精度 600r/min)
Pn303=0 (模拟量速度控制方向切换方式0:CW方向切换)
Pn312=1000 (加速时间 1000ms)
Pn313=1000 (减速时间 1000ms)
Pn314=250 (S曲线加减速时间 250ms)
4.实验过程
使用CP1H-XA40DT-D的模拟量输出功能,使用G5模拟量速度控制功能。
模拟量与速度对应关系如下图所示:
在实验过程中,发现当模拟量输入为0v时,电机以一个很缓慢的速度向CW方向旋转,即发生了“零漂”现象。
在闭环控制中,“零漂”现象对精度的控制有一定的影响,需要抑制住“零漂”现象。
什么叫“零漂”,及如何解决“零漂”现象?
零点漂移可描述为:输入电压为零,输出电压偏离零值的变化。
它又被简称为:零漂。
零点漂移是怎样形成的:运算放大器均是采用直接耦合的方式,我们知道直接耦合式放大电路的各级的Q点是相互影响的,由于各级的放大作用,第一级的微弱变化,会使输出极产生很大的变化。
当输入短路时(由于一些原因使输入级的Q点发生微弱变化,比如:温度),输出将随时间缓慢变化,这样就形成了零点漂移。
解决“零漂”最有效的方式:随着三极管的导通工作,其温度会上升,导致扩散运动加剧Ic、Ie电流增大,随之Re两端电压增大,Vbe的电压就减小,Ib也随之减小,从而使Ic减小,形成了负反馈,这就是其抑制零漂的原理。
针对G5伺服驱动器而言,需要修改里面参数来起到抑制“零漂”的现象。
对应调整参数:
修改Pn422的数值,默认为0.
此参数的作用是模拟量偏置,以0.359mv为单位,+为CW方向,-为CCW方向。
方式1:手动方式
调整方式:手动设置,及缓慢提高Pn422的数值,直到在0v电压下,电机不旋转,即调整完成。
方式2:自动方式
调整步骤如下:
5. G伺服对应“零漂”调整参数
试验2
试验接线:
试验设备:
R88D-WT01H
W10030H-S1
CP1H-XA40DT-D
实验设置参数:
Pn000----0010
Pn300----1000 (单位:0.01V)
Pn305----10(ms)
Pn306----10(ms)
Pn307----40(ms)速度指令电压输入(REF)滤波的时间常数
Pn308----0(0)设置速度反馈滤波的时间常数
试验步骤:
使用CP1H-XA40DT-D的模拟量输出功能,使用G5模拟量速度控制功能。
速度与模拟量对应关系:
在实验过程中,当模拟量输入0v时,电机并没有发生偏移现象。
但是,我在试验手册里还是找到了相关参数。
W伺服对应“零漂”调整参数。