无模型自适应控制方法的应用研究
无模型自适应控制方法综述

《无模型自适应控制方法综述》在现代控制领域中,无模型自适应控制方法因其独特的优势和广泛的应用前景而备受关注。
随着科技的不断发展和工业生产等领域对控制性能要求的日益提高,无模型自适应控制方法逐渐成为解决复杂系统控制问题的重要手段之一。
本文旨在对无模型自适应控制方法进行全面而系统的综述,深入探讨其基本原理、主要类型、特点以及在实际应用中的成果和挑战。
一、概述控制系统在工业生产、航空航天、交通运输、自动化等众多领域中起着至关重要的作用。
传统的控制方法往往基于对被控对象精确的数学模型建立,但在实际系统中,由于系统的复杂性、不确定性以及建模误差等因素的存在,很难获得准确且精确的数学模型。
这就促使了无模型自适应控制方法的产生和发展。
无模型自适应控制方法不依赖于被控对象的精确数学模型,而是通过对系统的上线观测和学习,不断调整控制策略,以适应系统的变化和不确定性,从而实现对被控对象的良好控制。
二、无模型自适应控制方法的基本原理无模型自适应控制方法的基本原理可以概括为以下几个关键步骤:(一)系统上线观测与状态估计通过传感器等手段对被控系统的状态变量进行实时监测和采集,获取系统的当前状态信息。
然后利用合适的估计方法,如卡尔曼滤波等,对系统的状态进行估计,以获得更准确的系统状态表征。
(二)控制律设计基于估计的系统状态,设计相应的控制律。
控制律的设计通常是根据一定的性能指标和控制策略进行优化,以实现对被控系统的期望控制效果。
(三)自适应调整根据系统的实际运行情况和估计误差,不断调整控制律中的参数或结构,使控制系统能够自适应地适应系统的变化和不确定性。
这种自适应调整可以是基于模型的自适应,也可以是基于数据驱动的自适应等方式。
通过以上基本原理的循环迭代,无模型自适应控制方法能够逐步逼近系统的最优控制状态,实现对被控系统的有效控制。
三、无模型自适应控制方法的主要类型(一)模型参考自适应控制(MRAC)MRAC 是无模型自适应控制中最经典的一种方法。
无模型自适应控制算法
无模型自适应控制算法无模型自适应控制算法(Model-Free Adaptive Control, MFAC)是一种针对复杂系统的控制方法,它不需要事先建立系统的数学模型,并能够根据系统的变化自适应地调整控制策略,以实现对系统的精确控制。
传统的控制算法通常需要系统的精确数学模型才能进行设计和分析,但是对于复杂的系统,往往很难准确地建立其数学模型。
而无模型自适应控制算法的出现,为解决这个问题提供了一种新的思路和方法。
无模型自适应控制算法的核心思想是利用系统的输入输出数据,通过递归的方式来估计系统的动态特性,并根据估计结果来调整控制策略。
具体来说,算法首先根据系统的初始状态和输入信号,通过某种递推关系来估计系统的动态特性。
然后,根据估计结果和期望输出信号之间的差异,调整控制器的参数,从而使系统的输出逐渐接近期望输出。
在控制过程中,算法会不断地更新估计结果和调整控制器的参数,以适应系统的动态变化。
无模型自适应控制算法的优势主要体现在以下几个方面:1. 免去系统建模的繁琐步骤:传统的控制算法需要事先建立系统的数学模型,这个过程需要耗费大量的时间和精力。
而无模型自适应控制算法不需要事先建立模型,只需要根据系统的输入输出数据进行估计,因此可以大大简化系统建模的过程。
2. 适应性强:无模型自适应控制算法能够根据系统的动态变化自适应地调整控制策略,因此对于复杂的系统具有较好的适应性。
无论系统的参数发生变化还是系统的结构发生变化,算法都能够通过更新估计结果和调整控制器的参数来实现对系统的精确控制。
3. 抗干扰能力强:无模型自适应控制算法通过比较系统的实际输出和期望输出之间的差异来调整控制器的参数,因此具有较强的抗干扰能力。
当系统受到外部扰动时,算法能够根据差异来调整控制器的参数,以抵消干扰的影响,从而实现对系统的稳定控制。
无模型自适应控制算法在实际应用中具有广泛的应用前景。
例如,在机器人控制中,机器人的动态特性常常很难准确建模,而无模型自适应控制算法可以通过不断地估计和调整来实现对机器人的精确控制。
无模型自适应控制方法综述
无模型自适应控制方法综述一、前言无模型自适应控制是一种基于系统动态特性而不依赖于准确模型的控制方法,具有广泛的应用前景。
本文将对无模型自适应控制方法进行综述,包括其基本原理、分类和应用等方面。
二、基本原理无模型自适应控制方法是一种基于系统动态特性的控制方法,其核心思想是通过对系统动态特性的估计来实现对系统的控制。
具体来说,该方法通过引入一个自适应机构来估计系统的未知参数和状态,并利用这些估计值来设计控制器。
这样就可以在不需要准确模型的情况下实现对系统的控制。
三、分类根据不同的自适应机构和控制策略,无模型自适应控制方法可以分为多种类型。
常见的分类方式包括以下几种:1. 直接自适应控制(Direct Adaptive Control,DAC):该方法直接通过估计系统未知参数来设计控制器,并且只需要测量系统输出信号。
2. 间接自适应控制(Indirect Adaptive Control,IAC):该方法通过估计系统状态和未知参数来设计状态反馈或输出反馈控制器,并且需要测量系统状态和输出信号。
3. 模型参考自适应控制(Model Reference Adaptive Control,MRAC):该方法通过引入一个参考模型来设计控制器,并且通过估计系统未知参数来调整参考模型的参数。
4. 无模型预测控制(Model-Free Predictive Control,MFPC):该方法通过引入一个预测模型来设计控制器,并且通过估计系统状态和未知参数来调整预测模型的参数。
四、应用无模型自适应控制方法具有广泛的应用前景,在多个领域得到了成功的应用。
以下是一些常见的应用场景:1. 机器人控制:无模型自适应控制方法可以用于机器人姿态控制、路径跟踪和力矩控制等方面。
2. 航空航天:无模型自适应控制方法可以用于飞行器姿态和位置控制、推力矢量控制等方面。
3. 工业过程:无模型自适应控制方法可以用于温度、压力、流量等工业过程的控制。
无模型自适应控制原理在液位控制中的应用
1 6— 0 —
维普资讯
个新引人的伪梯度向量 ( 或伪 Jc b ao i矩阵)
和 伪阶 数的概念 ,往受 控 系统轨 线 附近 用一
l sL , 一 l Gl l 。 () ,
范 围内 。浚控 制方 案 在研 华工 控机 ( AWS 一
控 参数 h 的变 化速 度并 不是 一开 始 就最 大 , ,
而是要 经过 一段时延时 问之后才达 到最大值 。
即多容过程埘干扰动的响应在时 间上存在时
延 。J 生时延 的 原应 要 是两 个容积 之 间存
这 一理论设计 的控制 器已经应 用于 工业现场 。
,
工 l业生 产过 程中的 液位控 制早 期 大 多采
生产中,对于选择合适的模糊控制规则比较 难。 文献【和【 中分别提出了广义预测白校 5 6 】 】 控制 ( P 算法和动态矩阵控制 ( MC 算 G C) D ) 法, 这两种方法和传统的PD控制算法相比, I
具有 鲁棒性 强、 跟踪性能 好 等优点 , 但对于具 体 非线 性 的系 统 ,这 两种 方法 都 有局 限性 。 无模 型 控制 的 研 究于 九 十年 代 初提 出 , 到九 十年 代 中期 有 了 突破 性 的进 展 , 目前 ,
节所 需的 物料或进 行 经济核 算 ,保 证安全生
仅利用蹙控系统的I0 数据来设计控制器的 /
挖 制 理论 与方 法 ” I l。
无模 型 自适 应控 制 基本思想 是 :利 用一
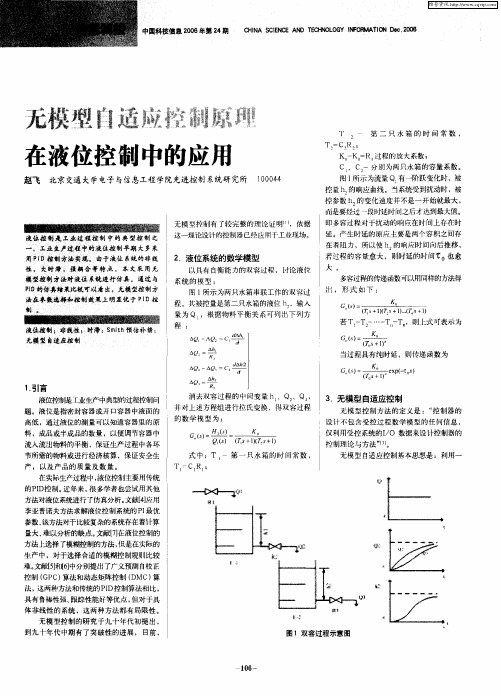
式 中:T, 第一 只_ 水箱的时间常数 ,
T 】 C】 { R】
产 ,以及产品的质量及数量 。
维普资讯
中囝科技信息 20 年第 2 期 06 4
无模型自适应控制器控制大时滞过程的研究

常 , 数) 用传ห้องสมุดไป่ตู้的PID控制器要实现稳定、 性能良 好的控制
就比较困难了。对于 T/T > 1 的系统, PID调节器实现稳 用 定控制几乎不可能。由此出现了许多专门控制大时滞过程 的各种特殊控制器, Smith 预估器等。这些大时滞过程控 如 制器虽然在控制器的数学模型比较准确时能取得良 好的控 制品质, 但往往鲁棒性较差,一旦过程特性发生变化,控 制效果将大大恶化。因此, 在实际中还难以有效地应用。 这些年,国内外出现了一类无模型控制器 (M odel Free
无模型 自适应控制器控制大时滞过程的研究
甘 宏
(广州大学城建学院, 广东 广州 510925) 摘 要:大时滞过程广泛存在于工业生产过程中。众所周知,大时滞过程的控制是过程控制中的难题。
对此, 对大时滞过程应用无模型自 适应控制器 (Model Free Adaptive Control er, MFA) 进行控制实 l 验
M 技术及其产品能解决常规控制技术无法做到的如 FA
引言
大时滞过程的控制问题是控制理论和实践研究的一个 热点问题。实践表明,目前广泛应用的 PID 调节器对复杂 大时滞过程很难达到优 良的控制性能。一般而言,当过程 的 : (1 >0.6 时(二是过程的纯滞后时间,T 是过程的时间 '
大滞后 、大惯性 、非线性 、变结构 、时变 、严重藕合以及 多参数控制等复杂的过程控制问题 ,下面简要介绍一下 MFA 控制器的基本结构及原理。 图 1 显示 了一个 SISO MFA 控制器的核心结构 ,MFA
研究。实 验结果表明, MFA 对大时滞过程具有良 好的输出跟踪性能,有很强的自 适应能力和鲁棒性, 与传统的 PID 控制器相比, 有着明显的优越性。 关健字:无模型自 适应控制器; 大时滞过程; 实 验研究
无模型自适应控制算法
无模型自适应控制算法无模型自适应控制算法是一种控制方法,可用于系统动态模型未知或难以确定的情况。
这种算法通过利用系统的输入和输出数据来在线估计并调整控制器的参数,以适应系统的变化。
本文将介绍无模型自适应控制算法的原理、应用和优缺点。
无模型自适应控制算法的基本原理是利用递归最小二乘法(RLS)来在线估计系统的动态特性。
控制器的参数根据估计的系统动态特性不断调整,以实现对系统的精确控制。
无模型自适应控制算法主要由以下几个部分组成:参数估计器,控制器,信号发生器和目标模型。
首先,参数估计器使用递归最小二乘法(RLS)来估计系统的动态特性。
其基本思想是通过对系统输入和输出数据的观测和分析,逐步找到最佳参数,以逼近真实的系统特性。
参数估计器会不断更新参数的估计值,以最小化估计误差。
然后,控制器利用参数估计器提供的系统特性信息来生成控制信号。
控制器的目标是使系统的输出尽可能接近期望值。
控制器可以根据实际情况调整自身的参数,以实现更好的控制效果。
信号发生器用于生成系统的输入信号。
输入信号的选择对于控制系统的性能和鲁棒性至关重要。
通常,输入信号具有一定的随机性,以保证系统的正常运行并提供足够的信息来估计系统的特性。
目标模型是控制系统的期望输出模型。
通过比较实际输出和目标模型的差异,控制器可以调整自身的参数,以使实际输出更接近期望输出。
目标模型通常可以根据系统的要求和性能指标进行选择。
无模型自适应控制算法可以应用于许多领域,如机器人控制、过程控制和自动驾驶等。
它在系统具有不确定性和非线性特性时尤其有用。
通过在线估计系统的动态特性和自适应调整控制器的参数,无模型自适应控制算法能够更好地适应系统的变化和不确定性,提高系统的控制性能和鲁棒性。
与传统的模型基准自适应控制算法相比,无模型自适应控制算法具有以下几个优点:1.不需要准确的系统模型:传统的自适应控制算法需要系统的准确模型,而无模型自适应控制算法可以在不知道系统模型的情况下进行控制。
多效蒸发的无模型自适应控制研究
Ke r s m o e -r e a ptvec ntolme ho y wo d : d lfe da i o r t d; m u tpl — fe te a o a o s no lne rs t m s c m p e li e e f c v p r t r ; n i a yse ; o utr
李 春玲 ,何小 阳
( 广西大学 电气工程学院 ,广西 南宁 5 0 0 3 0 4)
摘
要 :将 基 于紧格 式线性化 的非 线性 系统 无模型 自适应控 制方 法应用在 多效蒸发控 制 中。控 制器 的设计
是 直接 基 于称 为伪 偏导数 的向量 ,伪偏 导数 是根据 多效 蒸发 系统的人 工神经 网络模 型 的输入 输 出信 息在 线导 出 的。并利用 MAT AB仿真 实验证 明 了该 方法的有 效性 和稳 定性 ,其性 能优 于传统 P D控 制 。 L I
i a pidt lpeefc v p rtr o t T ec nr l r eini b sddrcl np e d ・at l eiaie (P s p l mut l—f t a o ao nr 1 h o t l sg ae i t o su op r a— r t s P D) e o i e e c o. oe d s e y i d v v
Sm u a j n j 1 to
0 引 言
蒸 发是重 要 的化 工单元操 作 。 由于 溶剂气 化需要
已经给 出了一些有 效 的控 制方法 ,如 P D控制¨ ,预 I
测控制 J 。但传统 PD对这种参数不确 定性 系统的应 I 用 的控制效 果不甚 理想 ,且参数 整定非 常困难 ;而预 测 控制 是基 于被控 对象 数学模 型 的控制 方法 。
无模型自适应控制在锅炉主汽温控系统中的应用
火 电厂 锅 炉 主 汽 温 度 是 确 保 机 组 安 全 、经 济 运 行 的 一 个 重 要参数 , 控 制 的难 点 在 于 大 惯 性 、 多扰 动 、 非线性等。 常 采用 串级 控 制 和 负 荷 分Байду номын сангаас级 串 级 控 制 。 由 于 串 级 控 制 系 统 主 副 回路 的 任务 和动态特性 不同 , 且主汽温度对 象的不稳定特 性 , 因此 , 主 回路 对控制的品质要求很高 , 不允许被调量存在静差 , 采用 P I D 调节 器 在 负 荷 扰 动 时 控 制 效 果 变 差 。副 回路 调 节 器 的任 务 是 快 速 动 作迅速消除进入副回路内的扰动 , 且副回路参数并不要求无差 ,
( M F A C ) s t r a t e g y w i t h t r a c k i n g d i f e r e n t i a t o r a s ma i n c o n t r o l l e r o f s e r i a l s y s t e m, w h i c h i n t e g r a t e s d e l a y f a c t o r i n t o f i l t e r f o r
Abs t r a c t
Ai mi n g a t t h e p r o b l e m o f n o n l i n e a r a n d t i me - v a r i a n c e o f b o i l e r ma i n s t r e a m t e mp e r a t u r e p a r a me t e r s , w h i c h i s c o n s i d -
s u ppr e s s i n g mea s ur e di s t ur ban c e a s wel l di s t u r ba nc e obs er v er f o r l oa d di s t u r ba n ce. Si mu l a t i o n r e su l t s s h o w t h a t t h i s a O— pr oa ch h as s t r on g r o bus t n es s an d s el f - ada pt i v e abi l i t y. Ke y wor ds : ma i n s t r e am t em p er at u r e. PI D co n t r ol , MF AC, t r a c ki ng di f f er en t i a t or
自适应控制算法的研究与应用
自适应控制算法的研究与应用自适应控制算法是一种根据被控对象时变特性而自适应改变控制策略的控制方法。
目前,自适应控制算法得到了广泛的研究和应用,已经成为现代控制工程中的一项重要技术。
本文将从自适应控制算法的定义、研究历史、算法原理、应用领域和未来展望等方面进行探讨。
一、自适应控制算法的定义自适应控制算法是一种针对动态、时变被控对象的自适应控制方法。
控制系统在运行过程中,根据被控对象的实际变化情况,通过自调整控制参数以及改变控制策略,以适应被控对象的时变特性,从而实现优化控制。
自适应控制算法的本质是通过自适应调整控制参数,对被控对象进行优化控制。
二、自适应控制算法的研究历史早在20世纪50年代,人们开始关注自适应控制算法的研究。
1950年,美国控制论专家艾伦·波里(Allen B. Poley)提出了自适应控制的基本思想。
60年代,由于控制对象日趋复杂,自适应控制算法开始得到更广泛的研究。
自适应控制算法的发展经历了几个重要阶段,如模型参考自适应控制、模型迭代控制、模型自适应控制、直接自适应控制等。
三、自适应控制算法的原理自适应控制算法的核心是通过对被控对象的状态进行实时监测和调整控制参数,实现对被控对象的实时适应。
自适应控制算法一般包含以下步骤:1、采集被控对象的状态信息自适应控制算法需要通过传感器等设备对被控对象的状态信息进行采集,例如温度、压力、速度、位置等。
2、建模和识别被控对象自适应控制算法需要通过数学模型对被控对象进行建模分析,以便识别被控对象的状态特性和变化规律。
3、选择控制策略自适应控制算法需要根据被控对象的实际状态,选择最优的控制策略,例如比例积分控制、模糊控制、神经网络控制等。
4、自适应调整控制参数自适应控制算法还需要通过自适应调整控制参数,从而实现对不同状态下被控对象的优化控制。
四、自适应控制算法的应用领域自适应控制算法已经广泛应用于机械、电子、化工、冶金、航空、航天等领域。
自适应控制方法在工业过程中的应用研究
自适应控制方法在工业过程中的应用研究一、引言自适应控制方法在工业过程中的应用已经成为科学研究的热点之一。
随着工业自动化程度的提高和生产过程的复杂化,传统的固定控制方法已经无法满足对工业过程高精度、高效率的要求。
因此,研究和应用自适应控制方法成为了迫切的需求。
本文将探讨自适应控制方法在工业过程中的应用研究,并分析其优势和挑战。
二、自适应控制方法的原理和分类自适应控制方法可以根据其原理和方法的不同进行分类。
常见的自适应控制方法包括模型参考自适应控制(MRAC)、模型无关的自适应控制(MIMC)、模型预测控制(MPC)等。
1. 模型参考自适应控制(MRAC)模型参考自适应控制是一种基于模型的自适应控制方法。
其主要原理是通过构建一个期望模型,将实际输出与期望输出进行比较,并根据比较结果调整控制参数,以达到控制系统快速、准确地响应外部扰动和变化的目标。
MRAC方法具有较好的鲁棒性和适应能力,因此在工业过程中得到了广泛的应用。
2. 模型无关的自适应控制(MIMC)模型无关的自适应控制是一种基于无模型的自适应控制方法。
它通过传感器测量工业过程中的关键数据,并基于这些数据进行自适应调整。
与MRAC相比,MIMC方法无需事先建立数学模型,更适用于实际工业过程中存在不确定性或无法准确建模的情况。
3. 模型预测控制(MPC)模型预测控制是一种基于模型的自适应控制方法,它利用数学模型对工业过程进行预测,并根据预测结果调整控制策略。
MPC方法可以通过优化算法来决策最佳控制策略,从而在充分预测工业过程的行为的基础上进行优化调整,提高控制质量和效率。
三、自适应控制方法在工业过程中的应用案例1. 自适应控制在化工过程中的应用化工过程常常受到原料质量的波动,以及反应器内的温度、压力等变化的影响,传统的固定控制方法难以实现对这些变化的精确控制。
自适应控制方法在化工过程中的应用可以根据实际反馈数据进行动态调整,对于反应器温度、压力等变量的控制更加准确,从而提高产品质量和生产效率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无模型自适应控制方法的应用研究
XXX
(北京化工大学自动化系,北京100029)
摘要:概述了一种新型的控制方法无模型自适应控制。
目的是对当前无模型自
适应控制有一个总体的认识, 它是一种无需建立过程模型的自适应控制方法。
与传统的基于模型的控制方法相比,无模型控制既不是基于模型也不是基于规则,它是一种基于信息的控制方法。
无模型控制器作为一种先进的控制策略,具有很强的参数自适应性和结构自适应性。
基于以上背景,首先介绍了无模型自适应控制的性质及特征,结合对北京化工大学405仿真实验室三级液位控制系统的仿真研究,并将其与PID控制器的效果进行了对比。
仿真表明, 无模型控制器具有良好的抗干扰能力、参数自适应性和结构自适应性。
关键字:无模型;自适应;控制;
Model Free Adaptive Control Theory and its Applications
XXX
(Department of Automation, Beijing University of Chemical Technology
Beijing 100029)
Abstract: A new kind of control method model-free adaptive control is given. The purpose is to make MFA to be understood. Model free adaptive control(MFAC)theory is an adaptive control method which does not need to model the industrial process.Compared with traditional control methods based on modeling,MFAC is an advanced control strategy which based on information of Input/Output Data.It has parameter adaptability and structure adaptability.Based on the background,First the property and character of MFA are introduced, Then Combining 405 Simulation Laboratory of Beijing University of Chemical technology three- level control system simulation.The simulation results show that MFAC controller has excellent robustness,anti-jamming capability, parameter and structure adaptability.
1 引言
PID调节器规律简单、运行可靠、易于实现,目前仍然是工业生产过程控制系统中应用较广泛的一类控制器。
然而, 传统的自适应控制器在处理非线性、可变结构及滞后对象时比较困难。
鲁棒控制适用于将控制系统的稳定性和可靠性作为首要目标, 同时过程的动态特性已知且不确定性因素的变化范围可以预估的情况。
预测控制系统的设计一般较为复杂, 需要由专家来完成, 它非常适用于先进过程控制和监督控制领域, 但不太适用于调节控制方面。
本文介绍一种无模型自适应控制方法, 无模型自适应控制器(Model Free Adaptive)无需数学建模以及复杂的人工参数整定即可控制时变、多变量等复杂过程。
2 无模型控制方法的定义与分类
无模型控制理论与方法是指:“控制器的设计仅利用受控系统的I/O数据,控制器中不包含受控过程数学模型的任何信息的控制理论与方法”。
按照这一定义,目前国内外已存在的典型无模型控制方法有:
1) PID类控制技术及相关的方法:PID控制利用偏差的比例(P)、积分(I)和微分(D)的线性加权和构成控制量,对被控对象进行控制。
2) 学习控制:包括迭代学习控制和重复控制。
迭代学习控制在设计时不需要事先已知受控系统的数学模型,但系统的收敛性分析以及对控制器增益的选取则需要知道受控系统输出关于控制变量偏导数的上下界,并要求系统严格满足全局Lipschitz条件、系统可重复性两个条.
3) 无模型自适应控制。
无模型自适应控制(Model Free Adaptive ,MFA),是一种无需建立过程模型的自适应控制方法。
与PID、自整定PID、模糊控制、神经网络、专家系统控制等流行的控制方式不同的是,MFA既不是基于模型也不是基于规则,可以说它是一种基于信息的全新的控制方法。
3 无模型自适应控制系统的特征
无模型自适应控制系统无需过程的精确的定量知识, 系统中不含过程辨识机制和辨识器, 不需要针对某一过程进行控制器设计, 不需要复杂的人工控制器参数整定, 具有闭环系统稳定性分析和判据, 确保系统的稳定性.
1)过程辨识对于传统的自适应控制方法,如果不能获得过程的定量信息, 一
般需要采用某种辨识机制, 以在线或离线的方式获得系统的动态特性。
由此产生了以下一些难以解决的问题需要离线学习辨识所需的不断的激励信号与系统平稳运行的矛盾模型收敛和局部最小值问题系统稳定性问题。
MFA 控制系统中没有辨识环节, 因此可以避免上述问题。
一旦运行,MFA控制器就可立刻接管控制。
控制器中刷新权值的算法是基于一个单一的目标, 即缩小设定值和过程变量之间的偏差。
2)控制器设计MFA控制器是通用型控制器,并已经开发出一系列MFA控制
器用于控制各种问题回路。
如SISO MFA控制器可直接取代PID, 免去了复杂的控制器参数整定;非线性MFA控制器能控制极端非线性过程;抗滞后MFA控制器能控制大滞后过程;MIMO MFA控制器能控制多变量过程前馈控制器能抑制可测的扰动;鲁棒MFA控制器能迫使过程变量维持在预定的范围。
3)控制器参数整定MFA自适应控制器不需要人工整定参数, 无模型自适应
控制器真正实现了这一点。
无需参数整定, MFA就能自适应过程动态特性的变化并克服潜在的扰动以满足新的操作条件。
4)系统稳定性控制系统的闭环稳定性对于控制器是否实用非常重要。
如果
掌握了闭环控制系统的稳定性判据, 就可以利用它来判断控制系统能否安全投人使用。
4 无模型控制器的仿真研究
在本文中,我们针对一种典型的工业被控对象的控制问题来讨论无模型控制器在实际中的应用。
首先介绍被控对象的结构特点及其计算机控制系统的设计与构成,接着运用无模型自适应控制理论设计无模型控制器来进行计算机控制,最后给出系统仿真结果。
通过计算机仿真来说明无模型自适应控制方案的有效性。
本文还将对无模型控制器与PID控制器的控制效果进行仿真研究对比。
被控对象流程说明:见下图,第一级液位系统为卧式储罐,其上游设双效阀V1,入口流量F1,储罐液位L1,储罐下部出口快开阀S1(开关),离心泵,离心泵入口压力P2,离心泵出口压力P3,离心泵出口流量F2,离心泵高点排气阀S3(开关),排气完成指示灯D1,离心泵出口双效阀V2。
第一级液位系统和离心泵另设独立的实验项目,系统结构及所有内容与三级液位的第一级完全相同。
针对此控制对象,本文设计了基于无模型自适应控制理论的无模型控制器。
为了充分认识MFA的控制性能,本文也将针对同一被控对象设计了PID控制器。
在同一条件下,对分别采用PID控制、无模型自适应控制设计的控制器进行了控制性能仿真对比。
1)无模型控制器设计
本文采用无模型控制理论设计MFA控制器,如下图所示,是采用以MFA
为控制器的线性系统的结构原理框图。
MFAC的控制律算法和伪偏导数估计算法如下,
系统初值设为
2)PID控制器设计
PID参数采用4:1衰减振荡法进行整定。
3)仿真结果分析
采用上述设计的PID控制器和无模型控制器,仿真结果分别见图1和图2。
图1 图2
由仿真结果分析可知:对于常规线性系统,模糊控制器和无模型自适应控制器都能很好地、快速实现其控制目标。
但PID控制器伴随着剧烈的震荡调节过程,而无模型控制器在整个控制过程中,平滑性好,输出超调量也几乎为零。
5 MFA与其他控制策略的比较
PID, 模型预测控制, 鲁棒控制, 基于模型的自适应控制和无模型自适应控
制之间的比较见下表。
从上表中可看出, 结合了所有控制方法的优点, 是下一代主流过程控制器的最佳候选者。
6 结语
本文介绍的无模型自适应控制技术在多变量非线性过程中的成功应用, 显示了它的优点。
MFA不需要过程的定量参数, 不需要过程辨识, 不需要复杂的控制器设计及参数的整定等步骤就可应用于复杂系统的控制。
因此, 它在工业控制领域应用范围将更广。
参考文献:
【1】刘金琨,先进PID控制及其MATLAB仿真,北京:电子工业出版社,2003 【2】韩志刚,王德进,无模型控制器,黑龙江大学自然科学学报,1994,11(4):29-35
【3】韩志刚,无模型控制器的应用,控制工程,2002,9(4):22—25
【4】侯忠生,非参数模型及其自适应控制理论,北京:科学出版社,1999 【5】王千一,吴春诚,吴相林,玻璃窑炉的无模型自适应控制,2007,26(1):159-163
【6】朱凌峰,李宏光,PH过程的无模型自适应控制,仪器仪表用户,2006,13(4):44-45。