现控习题答案(谢克明版)
现代控制理论谢克明版习题解答
s2
5s 6 2s s2 5s 6
5
1
2s 5 s2 5s
6
x
0 6
1 0 5x 1u
y [5 2] u
结构图如图题 3-1-5 图 2(a)所示
7
现代控制理论习题详解
2
u
x2 x3 x2 x1
x1
5
5
6
或有
题 3-1-5 图 2(a)
s 2 3s 1
11
G(s) s 2 5s 6 1 s 2 s 3
1 1 2 P11
1
当 1 3 时,由 (1I A)P1 0 得: 1
3
2P2
1
0
,取
P1
1
1 1 0 P31
1
1 1 2 P12 1
1
当 2 3 时,由 (2I A)P2 P1 得: 1
3
2
P22
1 ,取
P2
0
1 1 0 P32 1
0
3 1 2 P13
0
特征值为:
1 1, 2 2, 3 3 。
P11 P12 P13
设变换阵:P= P21
P22
P23
P31 P32 P33
由 (i I A)Pi 0 得
1 1 0 P11
P11 1
当 1 1时, 3 1 2P21 0 取 P1 P21 1
12 7 5 P31
P31 1
2 1 0 P12
(4) y(4) 3y 2y 3u u
【解】:
5
现代控制理论习题详解
在零初始条件下,方程两边拉氏变换,得到传递函数,再根据传递函数求状态空间
表达式。
现代控制工程题目及解答共12页word资料

1.简述现代控制理论和经典控制理论的区别.答:经典控制理论是以传递函数为基础的一种控制理论,控制系统的分析与设计是建立在某种近似的和试探的基础上,控制对象一般是单输入单输出、线性定常系统;对多输入多输出系统、时变系统、非线性系统等则无能为力。
主要的分析方法有频率特性分析法、根轨迹分析法、描述函数法、相平面法、波波夫法等。
控制策略仅限于反馈控制、PID控制等。
这种控制不能实现最优控制。
现代控制理论是建立在状态空间上的一种分析方法,它的数学模型主要是状态方程,控制系统的分析与设计是精确的。
控制对象可以是单输入单输出控制系统也可以是多输入多输出控制系统,可以是线性定常控制系统也可以是非线性时变控制系统,可以是连续控制系统也可以是离散和数字控制系统。
主要的控制策略有极点配置、状态反馈、输出反馈等。
现代控制可以得到最优控制。
2.简述用经典控制理论方法分析与设计控制系统的方法,并说明每一种方法的主要思想。
答:1:建立数学模型2:写出传递函数3:用时域分析和频域分析的方法来判断系统的稳定性等。
以及对其进行系统的校正和反馈。
频域响应法、根轨迹法根轨迹法的主要思想为:通过使开环传函数等于-1的s值必须满足系统的特征方程来控制开环零点和极点的变化,使系统的响应满足系统的性能指标。
频域响应法的主要思想为:通过计算相位裕量、增益裕量、谐振峰值、增益交界频率、谐振频率、带宽和静态误差常数来描述瞬态响应特性,首先调整开环增益,以满足稳态精度的要求;然后画出开环系统的幅值曲线和相角曲线。
如果相位裕量和增益裕量提出的性能指标不能满足,则改变开环传递函数的适当的校正装置便可以确定下来。
最后还需要满足其他要求,则在彼此不产生矛盾的条件下应力图满足这些要求。
3. 什么是传递函数?什么是状态方程答:传递函数:在零起始条件下,线型定常系统输出象函数X0(s)与输入象函数X i(s)之比。
描述系统状态变量间或状态变量与输入变量间关系的一个一阶微分方程组(连续系统)或一阶差分方程组(离散系统)称为状态方程。
现代控制理论课后习题答案

前言本书是为了与张嗣瀛院士等编写的教材《现代控制理论》相配套而编写的习题解答。
本书对该教材中的习题给予了详细解答,可帮助同学学习和理解教材的内容。
由于习题数量较多,难易程度不同,虽然主要对象是研究型大学自动化专业本科学生,但同时也可以作使用其它教材的专科、本科、以及研究生的学习参考书。
书中第5、6、8章习题由高立群教授组织编选和解答;第4、7 章由井元伟教授组织编选和解答,第1、2章由郑艳副教授组织编选和解答。
由于时间比较仓促,可能存在错误,请读者批评、指正。
另外有些题目解法和答案并不唯一,这里一般只给出一种解法和答案。
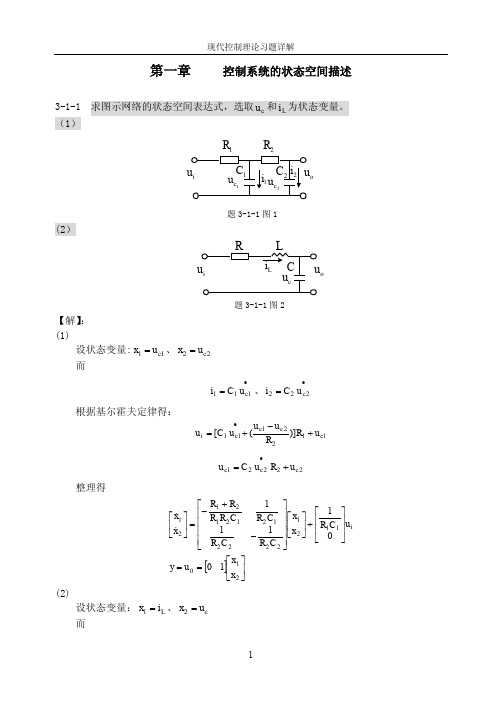
编者 2005年5月第2章 “控制系统的状态空间描述”习题解答2.1有电路如图P2.1所示,设输入为1u ,输出为2u ,试自选状态变量并列写出其状态空间表达式。
图P2.1解 此题可采样机理分析法,首先根据电路定律列写微分方程,再选择状态变量,求得相应的系统状态空间表达式。
也可以先由电路图求得系统传递函数,再由传递函数求得系统状态空间表达式。
这里采样机理分析法。
设1C 两端电压为1c u ,2C 两端的电压为2c u ,则212221c c c du u C R u u dt++= (1) 112121c c c du u duC C dt R dt+= (2) 选择状态变量为11c x u =,22c x u =,由式(1)和(2)得:1121121121212111c c c du R R C u u u dt R R C R C R C +=--+ 2121222222111c c c du u u u dt R C R C R C =--+ 状态空间表达式为:12111211212121212122222221111111R R C x x x u R R C R C R C x x x u R C R C R C y u u x +⎧=--+⎪⎪⎪=--+⎨⎪⎪==-⎪⎩&& 即: 12121121211112222222211111R R C R C R R C R C x x u x x R C R C R C +⎡⎤⎡⎤-⎢⎥⎢⎥⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦--⎢⎥⎢⎥⎣⎦⎣⎦&& []11210x y u x ⎡⎤=-+⎢⎥⎣⎦2.2 建立图P22所示系统的状态空间表达式。
现代控制理论试题(详细答案)-现控题目

现代控制理论试题B 卷及答案一、1 系统[]210,01021x x u y x ⎡⎤⎡⎤=+=⎢⎥⎢⎥-⎣⎦⎣⎦能控的状态变量个数是,能观测的状态变量个数是cvcvx 。
2试从高阶微分方程385y y y u ++=求得系统的状态方程和输出方程(4分/个)解 1. 能控的状态变量个数是2,能观测的状态变量个数是1。
状态变量个数是2。
…..(4分)2.选取状态变量1x y =,2x y =,3x y =,可得 …..….…….(1分)12233131835x x x x x x x u y x ===--+= …..….…….(1分)写成010*********x x u ⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦…..….…….(1分)[]100y x = …..….…….(1分)二、1给出线性定常系统(1)()(),()()x k Ax k Bu k y k Cx k +=+=能控的定义。
(3分)2已知系统[]210 020,011003x x y x ⎡⎤⎢⎥==⎢⎥⎢⎥-⎣⎦,判定该系统是否完全能观?(5分)解 1.答:若存在控制向量序列(),(1),,(1)u k u k u k N ++-,时系统从第k 步的状态()x k 开始,在第N 步达到零状态,即()0x N =,其中N 是大于0的有限数,那么就称此系统在第k 步上是能控的。
若对每一个k ,系统的所有状态都是能控的,就称系统是状态完全能控的,简称能控。
…..….…….(3分) 2.[][]320300020012 110-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=CA ………..……….(1分) [][]940300020012 3202=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=CA ……..……….(1分) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=940320110 2CA CA C U O ………………..……….(1分) rank 2O U n =<,所以该系统不完全能观……..….…….(2分)三、已知系统1、2的传递函数分别为2122211(),()3232s s g s g s s s s s -+==++-+求两系统串联后系统的最小实现。
自控所有答案 教材:《现代控制系统》(第八版)谢红卫等译 高等教育出版社,2001.6
被测变量:功率
控制装置:微处理器
#
P1.7[解]
正反馈占优
时间误差
#
P1.11[解]
利用浮球保持水箱的液面高度,使得滴水孔的流水量均衡,从而使得液面高度与时间成线性关系,保持了水钟的准确度。
#
E2.4[解]
#
E2.5[解]
#
E2.8[解]
#
E2.26[解]
#
P2.7[解]
#
P2.8[解]
当K=10时,
当K=20时,
#
E7.14[解]
>>rlocus([1,10] ,[1,5,0])
(a)分离点:
(b)由 可得
(c)
闭环传函的极点为:
#
E7.20[解]
>> rlocus([1,1] ,[1 3 -4 0])
(a)由Routh判据的K>6
(b)使复根稳定的最大阻尼比为 #
P7.1[解]
第十一章非线性系统
一道题见后
[说明]:1、教材:《.现代控制系统》(第八版)[美]Richard C. Dorf等著,谢红卫等译。高等教育出版社,2001.6。
2、基本题型必须完成,增强题型选作。
3、Matlab题型选作,并以*.m的形式发到邮箱:ligang@。
E1.1[解]
输出变量:功率
零极点为:
#
P2.36[解]
(a)
(b)一个正向通道:
两个环:
(c)令
(d)略
#
E3.3[解]
由已知:
状态转移矩阵
令: 求得
#
E3.11[解]
根据状态空间方程 可得:
(完整版)自动控制原理谢克明第三版部分习题答案
《自动控制原理(第3版)》部分习题答案第2章C2-1(a) 21211()(1)()()(1)R sL R Cs G s R sL R Cs R ++=+++C2-221114232233342526()()(1)(1)()()()()()()()()()()()()()m a a a a a e ma a L a a a a e m f fR G s K R R G s R Cs K T s R G s K c s G s U s JL s L f JR s fR c c L s R s G s M s JL s L f JR s fR c c U s G s K s =-=-=-+=-+=-Ω==++++-+Ω==++++==Ω 123412346512346()()()()()()1()()()()()()()()1()()()()()r L G s G s G s G s s U s G s G s G s G s G s G s s M s G s G s G s G s G s Ω=+Ω=+C2-4(a) 3123123()()()R LsG s R R R Ls R R R =++++C2-4(b) 323123()()()R LsG s R R Ls R R R =+++C2-5321122211212311(1)(1)(),(),(),()()1a b c d R Cs R Cs R C s R C s RG s RCs G s G s G s R Cs R C s R R R Cs ++++=-=-=-=-++ C2-612314512123214342123312341232233344()()()()()()()1()()()()()()()()()()()()()()()()()()()()1()()()()()()()()()()a b G s G s G s G s G s G s G s G s G s H s G s G s H s G s G s H s G s H s G s G s G s H s G s G s G s G s G s G s G s G s H s G s G s H s G s G s H s +=++++++=+++-12341()()()()()G s G s G s G s H sC2-713241761113241762851324()()[1()()]()()()()()1()()()()()()()()()()()()()()G s G s G s G s G s G s G s C s R s G s G s G s G s G s G s G s G s G s G s G s G s G s G s ++=+++++ 283261213241762851324()()()()()()()1()()()()()()()()()()()()()()G s G s G s G s G s C s R s G s G s G s G s G s G s G s G s G s G s G s G s G s G s +=+++++ 24132852213241762851324()()[1()()]()()()()()1()()()()()()()()()()()()()()G s G s G s G s G s G s G s C s R s G s G s G s G s G s G s G s G s G s G s G s G s G s G s ++=+++++ 17413152113241762851324()()()[1()()]()()()()1()()()()()()()()()()()()()()G s G s G s G s G s G s G s C s R s G s G s G s G s G s G s G s G s G s G s G s G s G s G s ++=+++++ C2-812341123243123312312()()()()()1()()()()()()()()()()()()()()()()G s G s G s G s G s G s H s G s G s H s G s H s G s G s G s H s G s G s G s H s H s +=+++++C2-9 12345214561111452145145124561112322()()()[1()()()]()()()()()()()1()()()()()()()()()()()()()()()()[1()()]()()(()()()G s G s G s G s G s H s G s G s G s G s C s s R s G s H s G s G s H s G s G s G s G s G s G s H s H s G s G s G s G s H s G s G s G C s s R s --Φ==+-+-++Φ==4511452145145121122)()()1()()()()()()()()()()()()()()()()()()s G s G s G s H s G s G s H s G s G s G s G s G s G s H s H s C s s R s s R s +-+-=Φ+Φ C2-1013453564256313421356253431342535643535123561434523345624()()[1()()]()[1()()]()()1()()()()()()()()()a G s G G G s G H s G G H s G G G s G H s G G H s G G G G s G G G G s G H s G G H s G H s G G H s G G s G G H H s G G G H H s G G G H H s G G G G H H s =++++++-+++++++++12353241212131223123()()()()()[1()]()[1()()2()()]()1()()2()()()()2()()()b G s G s G s G s G s G s G s G s G s G s G s G s G s G s G s G s G s G s G s G s G s ++++++=+++++第3章C3-1 21()Ts TsK e Tse G s T s ----=C3-2 220.910()1110s s s s s ++Φ=++C3-3105050()10.283sin(545)()1 1.4sin(545)t t tc t e e t c t et ---=--+=-+精近C3-422*0.23()(0.5)2*0.23()0.50.23G s s s s s s =+Φ=++C3-51212T T bK T T ε+<<C3-6 阶跃信号作用下稳态误差为零,要求n m a b =加速度信号作用下稳态误差为零,要求1122,,n m n m n m a b a b a b ----=== C3-7 21()(1)c sG s K T s =+C3-8 24()(46)G s s s s =++C3-9 250()(1225)G s s s s =++ C3-100.243τ=C3-11 (1)06,(2)303,(4)010/3K K K <<<<<<结构不稳()C3-12 (1)015,(2)0.72 6.24K K <<<< C3-13(1)(2)34系统稳定系统不稳定,有两个右根,()系统稳定()系统不稳定,有三个右根C3-14 3,K ω==C3-1533231()()1()()()()()n r G s G s G s H s G s G s G s =-+=第4章C4-1 图略C4-2 (1)图略 (2) 2233()24x y ++=C4-3 (1)图略 (2) 0.40.5K <<C4-4 分会点和渐近线123=0,,2,22a a d d d a πδϕ-+==±12320,2a d d d ====-(1)当时,图略 123180,6a d d d ====-(2)当时,图略 120,0a a d σ<=>(3)当0<时,图略 1180,0a a d δ<=<(4)当2<时,图略12318,,0a a d d d δ><(5)当时,三个不同实数分会点,图略C4-5(1) 图略,原系统不稳定;(2)增加零点且选择合适位置,可是系统稳定,零点05z << C4-6图略,系统稳定34K > C4-7 (1) 图略(2)当0.8629.14K <<,系统为欠阻尼状态,且 1.87K =阻尼比最小,系统地闭环极点为3 2.8j -±(3)试探求得 2,4 2.8K j =-±闭环极点, 1.06,0.75~1P s M t == C4-8 (1)等效开环传递函数为: (1)()(2)K s G s s s --=+正反馈系统根轨迹, 图略(2)系统稳定02K <<(3) 2,K ω==C4-9等效开环传递函数为: 22()===10)(44)(4410)Ka K G s K a s s s K s s s ''++++等(,图略 C4-10(1) 图略(2) 64,K ω==(3)1,20.5,1s ζ==-±C4-11(1) 图略 (2) 不在根轨迹上; (3) ()1cos 4c t t =-C4-12等效开环传递函数为: 322()=(4416)(4)(4)K KG s s s s s s s s =+++++等,K=8时试探求第5章C5-1(1)C5-1(2)C5-1(3)C5-2000(1)()0.83sin(30 4.76)(2)()0.83sin( 4.76) 1.64cos(2459.46)c t t c t t t =+-=----C5-3当12T T <,系统稳定当12T T >,系统不稳定. C5-4 2100()10100G s s s =++ C5-5(a) 0110(1)300(),4111(1)(1)510s G s s s γ+==++ (b) 00.1(),2581(1)50sG s s γ==+(c) 032(),141(1)2G s s s γ==+(d) 025(), 1.66(1001)(0.11)G s s s s γ==-++(e) 020.5(21)(),36.8(0.51)s G s s s γ+==+ (f) 0231.62(),9.860.010.0981G s s s γ==++ C5-6 (1) K=1(2)K=25(3)K=2.56(或精确求K=3.1) C5-7()()()a g i 稳定,(b)不稳定,(c)稳定,(d)稳定,(e)不稳定,(f)稳定,不稳定,(h)不稳定,不稳定,(j)不稳定,C5-8 102510000K K <<<和 C5-9(1)(2)闭环系统稳定; (3)078.5,g K γ==∞(4)K 增大10倍,对数幅值上升,但相频特性不变,系统的快速性提高,平稳性降低,系统地抗干扰性降低。
习题解答_现控理论_第5章

习题解答5-15-25-35-45-55-65-75-85-95-105-115-125-135-145-155-165-175-182 5-1 判定下列二次型函数的定号性。
(1) 31212322212232)(x x x x x x x V +-++=x(2) 32312321622)(x x x x x x V +-+=x(3) x x x x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡==201021111)(ττQ V(4) ⎪⎩⎪⎨⎧<+≥+=00)(242212221x x x x x x V x解:(1) 本题二次型函数对应的对称权矩阵P 为2-11-130101P ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦对实对称矩阵P 作合同变换如下:(1)(3)(1):(2)(1)(2):(1)(3)(1):(2)(1)(2)2-111-10100-130-130020*********P -→+→-→+→⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=⇒⇒⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦行行列列 因此该二次型函数及对应的对称权矩阵P 为正定的。
(2) 本题二次型函数对应的对称权矩阵P 为101003132P -⎡⎤⎢⎥=⎢⎥⎢⎥-⎣⎦对实对称矩阵P 作合同变换如下:(1)(3)(3):(2)3(3)(2):(1)(3)(3):(2)3(3)(2)101100100003003090132031001P +→-→+→-→-⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=⇒⇒-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦行行列列 因此该二次型函数及对应的对称权矩阵P 为不定的。
(3) 对实对称矩阵P 作合同变换如下:(1)(3)/2(1):(2)2(1)(2):(1)(3)/2(1):(2)2(1)(2)1111/2101/200120120000102002001P -→-→-→-→⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=⇒⇒⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦行行列列 因此该二次型函数及对应的对称权矩阵P 为半正定的。
现代控制理论第三章答案可修改全文

xc xc
0u 0
y cRc 1
1
1
xc xc
【习题3-12】试将下列系统按能观性进行结构分解。
1 2 1 0
(1) x 0 1
0
x
0u
1 4 3 1
y 1 1 1x
【解】判别能观性
c 1 1 1
N
cA
2
3
2
cA2 4 7 4
构造变换矩阵
Rank(N ) 2 n
将能控子空间按能观性分解
xc
0 1
8 1/ 3 6xc 1/ 6
1/ 3 1 1/ 3xc 0u
y1 1 2xc
c 1 2 Nc cA 2 4
Rank(Nc ) 1
Ro1
1 1
2
0
0 1 Ro 1/ 2 1/ 2
按能观性分解后:
0 0
即:
2 1 1
(2)
A
1 3
2
4
b
1 1
c 1
0
【解】M b
Ab
1 1
1 2
3
4
c 1 0
N cA 1
2
1 M
1
1 2 3 4
3 4 1 2
0
10
N
1
2 2 0
完全能控完全能观的条件:
3 2
4
0
1
2
0
(3)
M b
0 0 2 1
A 1
0
3
b
2
Ac 2
Tc21 ATc2
0 1
5 4
bc2
Tc21b
1 4
7 1
31 1 1
1 0