机械原理课后答案第章
机械原理习题册答案
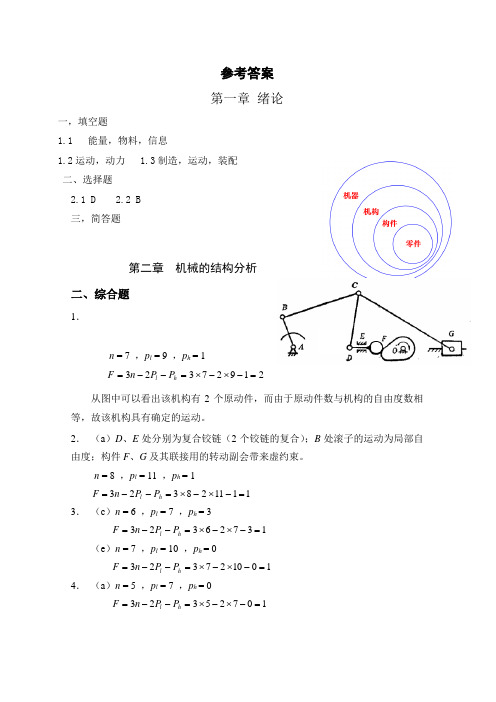
参考答案 第一章 绪论一,填空题1.1 能量,物料,信息1.2运动,动力 1.3制造,运动,装配 二、选择题2.1 D 2.2 B 三,简答题第二章 机械的结构分析二、综合题1.n = 7 ,p l = 9 ,p h = 121927323=-⨯-⨯=--=h l P P n F从图中可以看出该机构有2个原动件,而由于原动件数与机构的自由度数相等,故该机构具有确定的运动。
2. (a )D 、E 处分别为复合铰链(2个铰链的复合);B 处滚子的运动为局部自由度;构件F 、G 及其联接用的转动副会带来虚约束。
n = 8 ,p l = 11 ,p h = 1111128323=-⨯-⨯=--=h l P P n F3. (c )n = 6 ,p l = 7 ,p h = 313726323=-⨯-⨯=--=h l P P n F(e )n = 7 ,p l = 10 ,p h = 0101027323=-⨯-⨯=--=h l P P n F 4. (a )n = 5 ,p l = 7 ,p h = 010725323=-⨯-⨯=--=h l P P n FⅡ级组 Ⅱ级组 因为该机构是由最高级别为Ⅱ级组的基本杆组构成的,所以为Ⅱ级机构。
(c )n = 5 ,p l = 7 ,p h = 010725323=-⨯-⨯=--=h l P P n FⅢ级组因为该机构是由最高级别为Ⅲ级组的基本杆组构成的,所以为Ⅲ级机构。
5. n = 7 ,p l =10 ,p h = 0101027323=-⨯-⨯=--=h l P P n FⅡ级组 Ⅲ级组当以构件AB 为原动件时,该机构为Ⅲ级机构。
Ⅱ级组 Ⅱ级组 Ⅱ级组当以构件FG 为原动件时,该机构为Ⅱ级机构。
可见同一机构,若所取的原动件不同,则有可能成为不同级别的机构。
6. (a )n = 3 ,p l = 4 ,p h = 101423323=-⨯-⨯=--=h l P P n F因为机构的自由度为0,说明它根本不能运动。
机械原理习题及答案
第1章平面机构的结构分析1.1解释下列概念1.运动副;2.机构自由度;3.机构运动简图;4.机构结构分析;5.高副低代。
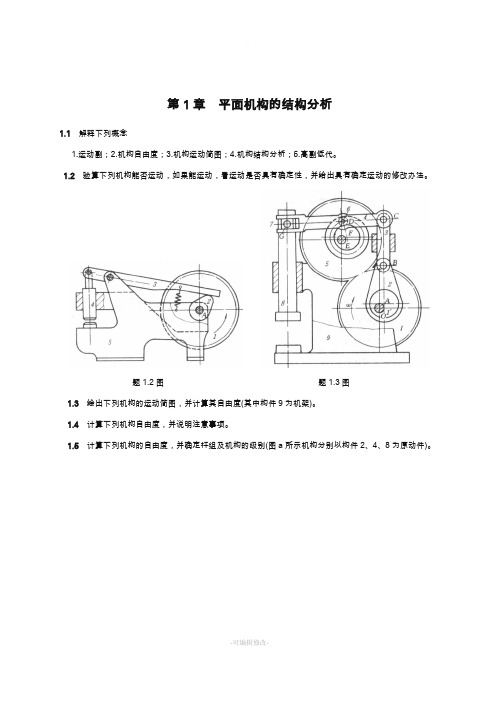
1.2验算下列机构能否运动,如果能运动,看运动是否具有确定性,并给出具有确定运动的修改办法。
题1.2图题1.3图1.3 绘出下列机构的运动简图,并计算其自由度(其中构件9为机架)。
1.4 计算下列机构自由度,并说明注意事项。
1.5计算下列机构的自由度,并确定杆组及机构的级别(图a所示机构分别以构件2、4、8为原动件)。
题1.4图题1.5图第2章平面机构的运动分析2.1试求图示各机构在图示位置时全部瞬心。
题2.1图2.2在图示机构中,已知各构件尺寸为l AB=180mm , l BC=280mm , l BD=450mm ,l CD=250mm ,l AE =120mm ,φ=30º, 构件AB上点E的速度为v E=150 mm /s ,试求该位置时C、D两点的速度及连杆2的角速度ω2。
2.3 在图示的摆动导杆机构中,已知l AB=30mm , l AC=100mm , l BD=50mm ,l DE=40mm ,φ1=45º,曲柄1以等角速度ω1=10 rad/s沿逆时针方向回转。
求D点和E点的速度和加速度及构件3的角速度和角加速度(用相对运动图解法)。
题2.2图题2.3图2.4 在图示机构中,已知l AB =50mm , l BC =200mm , x D =120mm , 原动件的位置φ1=30º, 角速度ω1=10 rad/s ,角加速度α1=0,试求机构在该位置时构件5的速度和加速度,以及构件2的角速度和角加速度。
题2.4图2.5 图示为机构的运动简图及相应的速度图和加速度图。
(1)在图示的速度、加速度多边形中注明各矢量所表示的相应的速度、加速度矢量。
(2)以给出的速度和加速度矢量为已知条件,用相对运动矢量法写出求构件上D 点的速度和加速度矢量方程。
机械原理课后答案
习题解答第一章绪论1-1 答:1 )机构是实现传递机械运动和动力的构件组合体。
如齿轮机构、连杆机构、凸轮机构、螺旋机构等。
2 )机器是在组成它的实物间进行确定的相对运动时,完成能量转换或做功的多件实物的组合体。
如电动机、内燃机、起重机、汽车等。
3 )机械是机器和机构的总称。
4 )a. 同一台机器可由一个或多个机构组成。
b. 同一个机构可以派生出多种性能、用途、外型完全不同的机器。
c. 机构可以独立存在并加以应用。
1-2 答:机构和机器,二者都是人为的实物组合体,各实物之间都具有确定的相对运动。
但后者可以实现能量的转换而前者不具备此作用。
1-3 答:1 )机构的分析:包括结构分析、运动分析、动力学分析。
2 )机构的综合:包括常用机构设计、传动系统设计。
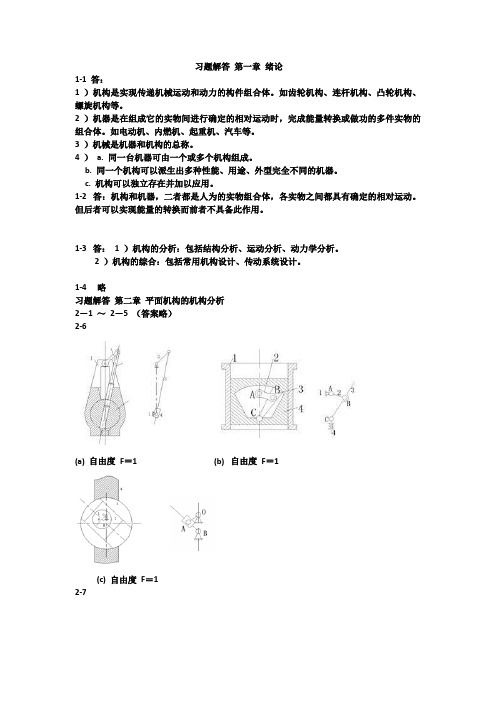
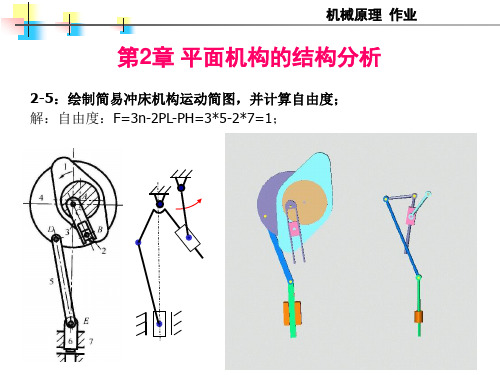
1-4 略习题解答第二章平面机构的机构分析2-1 ~2-5 (答案略)2-6(a) 自由度F=1 (b) 自由度F=1(c) 自由度F=12-7题2 -7 图F =3 × 7 -2 × 9 -2 =12 -8a) n =7 =10 =0 F =3×7-2×10 =1b) B 局部自由度n =3 =3 =2 F=3×3 -2×3-2=1c) B 、D 局部自由度n =3 =3 =2 F=3×3 -2×3-2 =1d) D( 或C) 处为虚约束n =3 =4 F=3×3 -2×4=1e) n =5 =7 F=3×5-2×7=1f) A 、B 、C 、E 复合铰链n =7 =10 F =3×7-2×10 =1g) A 处为复合铰链n =10 =14 F =3×10 -2×14=2h) B 局部自由度n =8 =11 =1 F =3×8-2×11-1 =1i) B 、J 虚约束C 处局部自由度n =6 =8 =1 F =3×6 -2×8-1=1j) BB' 处虚约束A 、C 、D 复合铰链n =7 =10 F =3×7-2×10=1 k) C 、D 处复合铰链n=5 =6 =2F =3×5-2×6-2 =1l) n =8 =11 F =3×8-2×11 =2m) B 局部自由度I 虚约束4 杆和DG 虚约束n =6 =8 =1 F =3×6-2×8-1 =12-9a) n =3 =4 =1 F =3 × 3 -2 × 8 -1 =0 不能动。
机械原理课后习题答案(朱理)

机械原理作业(部分答案)第一章结构分析作业1.2 解:F = 3n-2P L-P H = 3×3-2×4-1= 0该机构不能运动,修改方案如下图:1.2 解:(a)F = 3n-2P L-P H = 3×4-2×5-1= 1 A点为复合铰链。
(b)F = 3n-2P L-P H = 3×5-2×6-2= 1B、E两点为局部自由度, F、C两点各有一处为虚约束。
(c)F = 3n-2P L-P H = 3×5-2×7-0= 1 FIJKLM为虚约束。
1.3 解:F = 3n-2P L-P H = 3×7-2×10-0= 11)以构件2为原动件,则结构由8-7、6-5、4-3三个Ⅱ级杆组组成,故机构为Ⅱ级机构(图a)。
2)以构件4为原动件,则结构由8-7、6-5、2-3三个Ⅱ级杆组组成,故机构为Ⅱ级机构(图b)。
3)以构件8为原动件,则结构由2-3-4-5一个Ⅲ级杆组和6-7一个Ⅱ级杆组组成,故机构为Ⅲ级机构(图c)。
(a) (b) (c)第二章 运动分析作业2.1 解:机构的瞬心如图所示。
2.2 解:取mmmm l /5=μ作机构位置图如下图所示。
1.求D 点的速度V D13P D V V =而 25241314==P P AE V V E D ,所以 s mm V V E D /14425241502524=⨯==2. 求ω1s r a d l V AE E /25.11201501===ω3. 求ω2因 98382412141212==P P P P ωω ,所以s rad /46.0983825.1983812=⨯==ωω 4. 求C 点的速度V Csmm C P V l C /2.10154446.0242=⨯⨯=⨯⨯=μω2.3 解:取mmmm l /1=μ作机构位置图如下图a 所示。
1. 求B 2点的速度V B2V B2 =ω1×L AB =10×30= 300 mm/s 2.求B 3点的速度V B3V B3 = V B2 + V B3B2大小 ? ω1×L AB ? 方向 ⊥BC ⊥AB ∥BC 取mm s mm v /10=μ作速度多边形如下图b 所示,由图量得:mmpb 223= ,所以smm pb V v B /270102733=⨯=⨯=μ由图a 量得:BC=123 mm , 则mmBC l l BC 1231123=⨯=⨯=μ3. 求D 点和E 点的速度V D 、V E利用速度影像在速度多边形,过p 点作⊥CE ,过b 3点作⊥BE ,得到e 点;过e 点作⊥pb 3,得到d 点 , 由图量得:mmpd 15=,mmpe 17=,所以smm pd V v D /1501015=⨯=⨯=μ , smm pe V v E /1701017=⨯=⨯=μ;smm b b V v B B /17010173223=⨯=⨯=μ4. 求ω3s rad l V BC B /2.212327033===ω5. 求n B a 222212/30003010smm l a AB n B =⨯=⨯=ω6. 求3B aa B3 = a B3n + a B3t = a B2 + a B3B2k + a B3B2τ 大小 ω32L BC ? ω12L AB 2ω3V B3B2 ?方向 B →C ⊥BC B →A ⊥BC ∥BC 22233/5951232.2s mm l a BC n B =⨯=⨯=ω223323/11882702.222s mm V a B B k B B =⨯⨯=⨯=ω取mm s mm a 2/50=μ作速度多边形如上图c 所示,由图量得:mmb 23'3=π ,mmb n 20'33=,所以233/11505023's mm b a a B =⨯=⨯=μπ2333/10005020's mm b n a at B =⨯=⨯=μ7. 求3α233/13.81231000s rad l a BC tB ===α8. 求D 点和E 点的加速度a D 、a E利用加速度影像在加速度多边形,作e b 3'π∆∽CBE ∆, 即 BE eb CE e CB b 33''==ππ,得到e 点;过e 点作⊥3'b π,得到d 点 , 由图量得:mme 16=π,mmd 13=π,所以2/6505013s mm d a a D =⨯=⨯=μπ ,2/8005016s mm e a a E =⨯=⨯=μπ 。
机械原理第七版西北工业大学课后习题答案(2—8章)
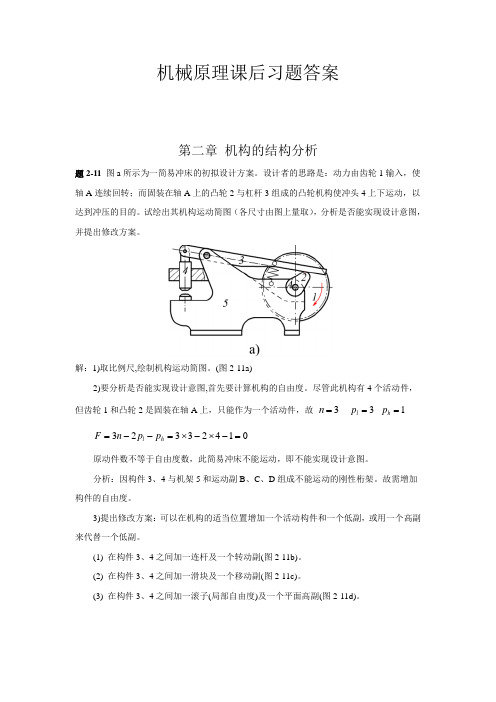
机械原理课后习题答案第二章 机构的结构分析题2-11 图a 所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:1)取比例尺,绘制机构运动简图。
(图2-11a)2)要分析是否能实现设计意图,首先要计算机构的自由度。
尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A 上,只能作为一个活动件,故 3=n 3=l p 1=h p01423323=-⨯-⨯=--=h l p p n F原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:因构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1) 在构件3、4之间加一连杆及一个转动副(图2-11b)。
(2) 在构件3、4之间加一滑块及一个移动副(图2-11c)。
(3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-11d)。
11(c)题2-11(d)54364(a)5325215436426(b)321讨论:增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b )(c )所示,这样就相当于给机构增加了一个自由度。
用一个高副代替一个低副也可以增加机构自由度,如图2-1(d )所示。
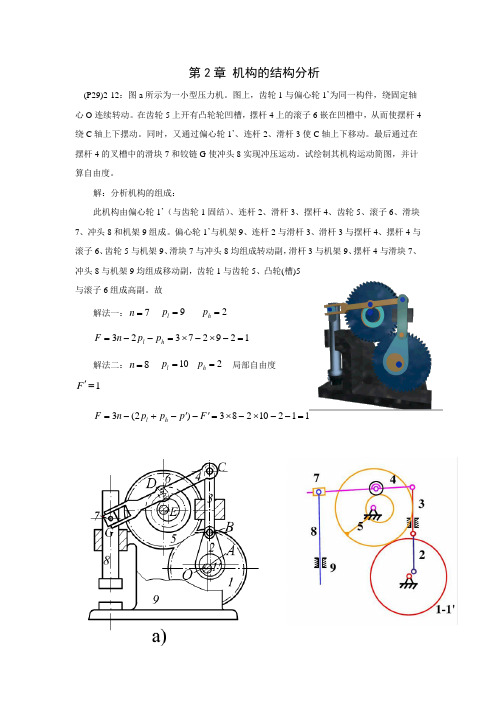
题2-12 图a 所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。
《机械原理》第八版课后习题答案
第2章 机构的结构分析(P29)2-12:图a 所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。
试绘制其机构运动简图,并计算自由度。
解:分析机构的组成:此机构由偏心轮1’(与齿轮1固结)、连杆2、滑杆3、摆杆4、齿轮5、滚子6、滑块7、冲头8和机架9组成。
偏心轮1’与机架9、连杆2与滑杆3、滑杆3与摆杆4、摆杆4与滚子6、齿轮5与机架9、滑块7与冲头8均组成转动副,滑杆3与机架9、摆杆4与滑块7、冲头8与机架9均组成移动副,齿轮1与齿轮5、凸轮(槽)5与滚子6组成高副。
故解法一:7=n 9=l p 2=h p12927323=-⨯-⨯=--=h l p p n F解法二:8=n 10=l p 2=h p 局部自由度1='F11210283)2(3=--⨯-⨯='-'-+-=F p p p n F h l(P30) 2-17:试计算如图所示各机构的自由度。
图a 、d 为齿轮-连杆组合机构;图b 为凸轮-连杆组合机构(图中在D 处为铰接在一起的两个滑块);图c 为一精压机机构。
并问在图d 所示机构中,齿轮3与5和齿条7与齿轮5的啮合高副所提供的约束数目是否相同?为什么?解: a) 4=n 5=l p 1=h p11524323=-⨯-⨯=--=h l p p n Fb) 5=n 6=l p 2=h p12625323=-⨯-⨯=--=h l p p n F12625323=-⨯-⨯=--=h l p p n Fc) 5=n 7=l p 0=h p10725323=-⨯-⨯=--=h l p p n Fd) 6=n 7=l p 3=h p13726323=-⨯-⨯=--=h l p p n F(C 可看做是转块和导块,有1个移动副和1个转动副)齿轮3与齿轮5的啮合为高副(因两齿轮中心距己被约束,故应为单侧接触)将提供1个约束。
机械原理课后习题答案
inva )
=6.8mm
分度圆半径r=mz/2=10*18/2=90mm
齿槽宽:ea=2π ra/z-sa
分度圆齿厚s=π m/2=15.7mm
=28.1mm
齿顶圆半径ra=r+ha*m=90+10=100mm
基圆半径rb=rcosα=90cos200=84.57mm
inv200=0.0148
齿顶圆压力角
第2章 平面机构的结构分析
2-7:计算自由度,指出所有的复合铰链、局部自由度和虚约束,判定运动 是否确定; 解:自由度:
a) F=3n-2PL-PH=3*3-2*4=1;确定 b) F=3n-2PL-PH=3*6-2*8=2;不确定 c) F=3n-2PL-PH=3*4-2*5-1=1;确定 d) F=3n-2PL-PH=3*4-2*5-1=1;确定
从而lAB+lBC, lBC-lAB可求得,最后确定lAB和lBC; 设计步骤:
①取一点A,并定D点; ②以D为圆心,作圆; 根据CD摆角15°定C1,C2点; ③ 量取lAC1,lAC2
lAB+lBC=430 lBC-lAB=348
C2 15° 15°C1
B A
lAB=41
A
B1
D
lBC=389
B2
虚约束
局部自由度
复合铰链
a)
b)
c)
d)
机械原理 作业
第2章 平面机构的结构分析
2-8:计算自由度;确定机构所含杆组的数目与级别;确定机构级别。画出 瞬时替代机构; 解:自由度:
a) F=3n-2PL-PH=3*7-2*10=1;Ⅱ级 b) F=3n-2PL-PH=3*6-2*8-1=1;Ⅲ级
机械原理第七版课后答案
机械原理第七版课后答案
1. 机械原理是工程学中的重要基础课程,它涉及到机械结构、运动学、动力学等方面的知识,对于理解和设计各种机械系统都具有重要意义。
在学习机械原理的过程中,课后习题是检验学生对知识掌握程度的重要手段。
因此,以下是机械原理第七版课后答案,供大家参考。
2. 第一章机械原理基础知识。
1. 什么是机械原理?
答,机械原理是研究机械运动规律和机械结构工作原理的科学。
2. 机械原理的研究对象包括哪些方面?
答,机械原理的研究对象包括机械结构、运动学、动力学等方面的知识。
3. 第二章机械结构。
1. 什么是机械结构?
答,机械结构是由零件和零件之间的连接构成的整体。
2. 机械结构的作用是什么?
答,机械结构的作用是传递和转换力、运动和能量。
4. 第三章运动学。
1. 什么是运动学?
答,运动学是研究物体运动状态、运动轨迹和运动规律的学科。
2. 运动学的研。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2-7何谓机构的组成原理?何谓基本杆组?它具有什么特性?如何确定基本杆组的级别及机构的级别?
答:参考教材18~19页。
2-8为何要对平面高副机构进行“高副低代"?“高副低代”应满足的条件是什么?
(1)未刹车时,刹车机构的自由度
2)闸瓦G、J之一剃紧车轮时.刹车机构的自由度
3)闸瓦G、J同时刹紧车轮时,刹车机构的自由度
解:1>
2>
3>
2-23图示为一内然机的机构运动简图,试计算自由度t并分析组成此机构的基本杆组。如在该机构中改选EG为原动件,试问组成此机构的基本杆组是否与前者有所不同。
解:
2-21图示为一收放式折叠支架机构。该支架中的件1和5分别用木螺钉连接于固定台板1’和括动台板5`上.两者在D处铰接,使活动台板能相对于固定台极转动。又通过件1,2,3,4组成的铰链四杆机构及连杆3上E点处的销子与件5上的连杆曲线槽组成的销槽连接使活动台板实现收放动作。在图示位置时,虽在活动台板上放有较重的重物.活动台板也不会自动收起,必须沿箭头方向推动件2,使铰链B,D重合时.活动台板才可收起(如图中双点划线所示)。现已知机构尺寸lAB=lAD=90 mm;lBC=lCD=25 mm,其余尺寸见图。试绘制该机构的运动简图,并计算其自由度。
2-10请说出你自己身上腿部的髋关节、膝关节和踝关节分别可视为何种运动副?试画出仿腿部机构的机构运动简图,并计算其自由度。
2-11图示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮j输入,使轴A连续回转;而固装在轴^上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
(3)对。因为ω3≡ω2。
3-14在图示的摇块机构中,已知lAB=30mm,lAC=100mm,lBD=50 mm,lDE=40 mm,曲柄以等角速度ωl=40rad/S回转,试用图解法求机构在φ1=45o位置时,点D及E的速度和加速度,以及构件2的角速度和角加速度。
解(1)以μl作机构运动简图(a)所示。
解:1)速度分析:以F为重合点.有
vF4=vF5=vF1+vF5F1
以μl作速度多边形图如图(b)得,f4(f5)点,再利用速度影像求得b及d点
根据vC=vB+vCB=vD+vCD继续作速度图,矢量pc就代表了vC
2)加速度分析:根据aF4= anF4+ atF4= aF1+ akF5F1+ arF5F1
所示,大腿弯曲90。时的机构运动简图,如图中虚线所示。其自由度为:
F=3n-(2pl+ph-p’)-F’=3×5-(2×7+0-0)-0=1
2-15试绘制图n所示仿人手型机械手的食指机构的机构运动简图(以手掌8作为相对
固定的机架),井计算自由度。
(1)取比倒尺肌作机构运动简图
(2)计算自由度
解:
2-18图示为一刹车机构。刹车时,操作杆j向右拉,通过构件2、3、4、5、6使两闸瓦刹住车轮。试计算机构的自由度,并就刹车过程说明此机构自由度的变化情况。(注;车轮不属于刹车机构中的构件。
F=3n- (2pl+ph-p’)- F’=3ⅹ7- (2ⅹ8+2-0)- 2=1
(2)如将D处结构改为如图b所示形式,即仅由两个移动副组成。注意,此时在该处将带来一个虚约束。因为构件3、6和构件5、6均组成移动副,均要限制构件6在图纸平面内转动,这两者是重复的,故其中有一个为虚约束。经分析知这时机构的活动构件数为6,低副数为7,高副数和局部自由度数均为2,虚约束数为1,故机构的自由度为
3-12在图示的机构中,设已知构件的尺寸及原动件1的角速度ω1(顺时针),试用图解法求机构在图示位置时C点的速度和加速度。
(a)
答:
(1分) (1分)
Vc3=VB+VC3B=VC2+VC3C2(2分)
aC3=aB+anC3B+atC3B=aC2+akC3C2+arC3C2(3分)
VC2=0 aC2=0(2分)
F=3n- (2pl+ph- p’)- F’=3×6- (2ⅹ7+2-1)- 2=1
上述两种结构的机构虽然自由度均为一,但在性能上却各有千秋:前者的结构较复杂,但没有虚约束,在运动中不易产生卡涩现象;后者则相反,由于有一个虚约束,假如不能保证在运动过程中构件3、5始终垂直,在运动中就会出现卡涩甚至卡死现象,故其对制造精度要求较高。
答:参考教材20~21页。
2-9任选三个你身边已有的或能观察到的下列常用装置(或其他装置),试画出其机构运动简图,并计算其自由度。1)折叠桌或折叠椅;2)酒瓶软木塞开盖器;3)衣柜上的弹簧合页;4)可调臂台灯机构;5)剥线钳;6)磁带式录放音机功能键操纵机构;7)洗衣机定时器机构;8)轿车挡风玻璃雨刷机构;9)公共汽车自动开闭门机构;10)挖掘机机械臂机构;…。
解:1)以选定的比例尺μ机械运动简图(图b)
2) 求vc定出瞬心p12的位置(图b)
因p13为构件3的绝对瞬心,则有
ω3=vB/lBp13=ω2lAB/μ=10××78=(rad/s)
vc=μcp13ω3=×52×=(m/s)
3)定出构件3的BC线上速度最小的点E的位置,因BC线上速度最小的点必与p13点的距离最近,故丛p13引BC线的垂线交于点E,由图可得
解(1)取比例尺作机构运动简图如图所示。
(2) F=3n-(2p1+ph-p’)-F’=3×4-(2×4+0-0)-1=1
2-14图示是为高位截肢的人所设汁的一种假肢膝关节机构。该机构能保持人行走的稳定性。若以胫骨1为机架,试绘制其机构运动简图和计一算其自由度,并作出大腿弯曲时的机构运动简图。
解把胫骨l相对固定作为机架.假肢膝关节机构的机构运动简图如图
齿轮3、5和齿条7与齿轮5的啮合高副所提供的约束数目不同,因为齿轮3、5处只有一个高副,而齿条7与齿轮5在齿的两侧面均保持接触,故为两个高副。
2-13图示为一新型偏心轮滑阎式真空泵。其偏心轮1绕固定轴心A转动,与外环2固连在一起的滑阀3在可绕固定轴心C转动的圆柱4中滑动。当偏心轮按图示方向连续回转时可将设备中的空气吸入,并将空气从阀5中排出,从而形成真空。(1)试绘制其机构运动简图;(2)计算其自由度。
(1分)
anB3+atB3=aB2+akB3B2+arB3B2(3分)
3- 13试判断在图示的两机构中.B点足否都存在哥氏加速度?又在何位置哥氏加速度为零?怍出相应的机构位置图。并思考下列问题。
(1)什么条件下存在氏加速度?
(2)根椐上一条.请检查一下所有哥氏加速度为零的位置是否已全部找出。
(3)图(a)中,akB2B3==2ω2vB2B3对吗?为什么。
1)取比例尺绘制机构运动简图
2)分析是否能实现设计意图
解:
不合理∵ ,可改为
2-12图示机构为一凸轮齿轮连杆组合机构,试绘制其机构示意简图并计算自由度。
解:
2-16试计算图示凸轮-连杆组合机构的自由度
(a)
解: A为复合铰链
(b)
解:(1)图示机构在D处的结构与图2-1所示者一致,经分析知该机构共有7个活动构件,8个低副(注意移动副F与F’,E与E’均只算作一个移动副),2个高副;因有两个滚子2、4,所以有两个局部自由度,没有虚约束,故机构的自由度为
由构件1、3在K点的速度方向相同,可知ω3与ω1同向。
3-6在图示的四杆机构中,LAB=60mm,LCD=90mm,LAD=LBC=120mm,ω2=10rad/s,试用瞬心法求:
1)当φ=165°时,点的速度vc;
2)当φ=165°时,构件3的BC线上速度最小的一点E的位置及速度的大小;
3)当VC=0时,φ角之值(有两个解)。
(a)
(b)
答:
答:
(10分)
(d)
(10分)
3-4标出图示的齿轮一连杆组合机构中所有瞬心,并用瞬心法求齿轮1与齿轮3的传动比ω1/ω3。
答:1)瞬新的数目:
K=N(N-1)3个瞬心P16、P36、P13的位置
3)
ω1/ω3= P36P13/P16P13=DK/AK
(2)速度分析:
以C为重合点,有
vC2= vB+ vC2B= vC3+ vC2C3
大小?ω1lAB?0’
方向? ┴AB ┴BC //BC
以μl作速度多边形图(b),再根据速度影像原理,作△bde∽/△BDE求得d及e,由图可得
vD=μvpd=0.23 m/s
vE=μvpe=0.173m/s
ω2=μvbc2/lBC=2 rad/s(顺时针)
(3)加速度分析:
以C为重合点,有
aC2== aB+ anC2B+ atC2B== aC3+ akC2C3+ arC2C3
大小ω12lABω22lBC? 0 2ω3vC2C3?
方向B—A C—B ┴BC ┴BC //BC
其中anC2B=ω22lBC= m/s2,akC2C3=2ω3vC2C3=/s2,以μa作加速度多边形如图(c)所示,由图可得
答:参考教材12~13页。
2-4何谓最小阻力定律?试举出在机械工程中应用最小阻力定律的1、2个实例。
2-5在计算平面机构的自由度时,应注意哪些事项?
答:参考教材15~17页。
2-6在图2-20所示的机构中,在铰链C、B、D处,被连接的两构件上连接点的轨迹都是重合的,那么能说该机构有三个虚约束吗?为什么?
解:机械运动简图如下:
F=3n-(2p1+pb-p`)-F`=3×5-(2×6+1-0)-1=1