并行输入与输出(精选)
74HC165功能说明

74HC165功能说明
1.并行输入:74HC165具有8个并行输入引脚(A-H),可以同时读取8个输入信号。
这些输入信号可以是数字信号,也可以是模拟信号。
2.串行输出:74HC165具有串行输出引脚(QH),它可以将输入信号转换为串行输出信号。
输出信号的顺序与输入信号的读取顺序相同。
3.移位操作:74HC165可以通过移位操作来读取并且存储输入信号。
移位操作可以由一个时钟信号(SH/LD)和一个时钟使能信号(CLKINH)来控制。
当时钟使能信号为高电平时,移位操作生效;当时钟使能信号为低电平时,移位操作被禁止。
4.并行加载:除了移位操作之外,74HC165还可以通过并行加载操作来读取并存储输入信号。
并行加载操作可以通过时钟使能引脚(CLKINH)和并行加载引脚(PL)来控制。
当时钟使能引脚为高电平时,同时并行加载引脚为高电平,即可进行并行加载操作。
5.级联操作:多个74HC165芯片可以级联在一起,以扩展输入信号的数量。
级联操作可以通过级联引脚(SERA/B)和级联输出引脚(QH)来实现。
级联引脚可以将一个74HC165的输出连接到另一个74HC165的输入,以实现数据的串行传输。
总结起来,74HC165是一种用于将8个并行输入信号转换为串行输出信号的移位寄存器芯片。
它通过移位操作和并行加载操作来读取并存储输入信号,并且可以通过级联操作扩展输入信号的数量。
这种芯片在数字电路控制和数据采集等应用中非常常见,具有广泛的用途。
并行IO口
P1口只能作为通用I/O口, 内部结构如图所示,由于 内部有上拉电阻,因此输 出时无需加上拉电阻,但 输入时,同P0口一样,必 须向端口输出‘1’,
P2口既可以作为通用I/O 口,在扩展程序存储器、 外部数据存储器或I/O口时, 也可作为地址总线的高8位。 作为I/O口使用时,用法与 P1口一样。
P0口的基本功能是数据的 输入与输出,此外在扩展 程序存储器、外部数据存 储器或I/O口时,作为数 据总线和低8位地址总线。
是P0口作为输出口使用时 需加上拉电阻, ;P0作为 输入口使用时,必须首先 写端口输出‘1’.
在实际应用中,P0口常作为地址/数据总 线口用,即,P0口先输出片外存储器的低8
并行I/O口
I/O端口是单片机实现信息交换和对外控制的重 要通道。
单片机内部有P0、P1、P2、P3 4个8位双向I/O 口,外设与这些端口可以直接相连,无需另外的 接口芯片。P0~P3既可以按字节输入或输出,也 可以按位进行输入输出,共32条口线,其控制十 分灵活方便。各个端口的结构、功能有所不同 。
P2口除了I/O使用外,还可以作为地址端 口使用,当使用外存储器时,与P0口一起 组成16位地址,这是,P2口输出高8位地址 。
注意:P1口输出()地址。
P3口除了双向输入/输出 口功能外,还具有第二功 能,其内部结构如图所示。 其输入/输出的用法同P1 口。
Ps:P0作输入时不需要上拉电阻,但要先置1。 因为P0口作一般I/导通,永远只能 读到0。 因此在输入前置1,使下拉场效应管截止,端口会 处于高阻浮空状态,才可以正确读入数据。 至于输出时,输出0是正常的,输出1时由于端口 处于浮空状态不能正确输出1,因此才需要接上拉 电阻。
中职教育-《89C51单片机实用教程》课件:第8章 89C51单片机并行输入输出(4).ppt
电路中, 将A15 (P2.7)、A14 (P2.6)、A13 (P2.5)连接 到三-八译码器74LS138的输入端,译码输出信号Y2用 作8255A的片选输入信号(CS)。
又将A12 (P2.4)、A11 (P2.3)连接到8255A的A1、A0 端,得到8255A的端口地址,如表所示。
MOV A,R5
MOV DPTR,#5000H : 8255A的C口地址
MOVX @DPTR,A
: 送LED位选码
LCALL DELAY
;延时1ms
INC R1
;修改缓存区地址指针
MOV A,R5
RL A
MOV R5,A
;修改位选指针R5
DJNZ R2,DISP ;6位显示完否?未完继续
LJMP LED
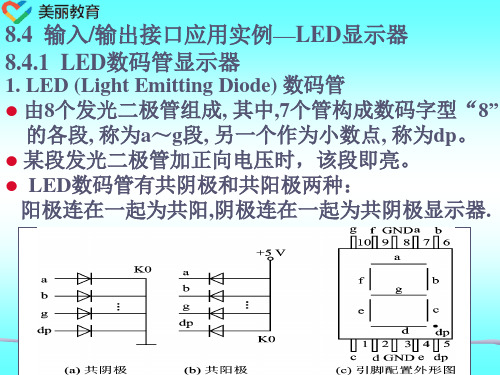
⑵. LED段码(字型码)查表 显示缓冲区中保存二进制数据, LED显示要输出段
码(字型码)。要将二进制数据译码为LED字型码。 译码方法一种是硬件译码, 采用专用的译码器电路。 另一种是软件译码, 在ROM中将段码作成一个表,
利用查表法查出不同字符的相应段码。简单,常用。 本例采用软件译码 (查表) 方法,用查表指令进行。
6位动态扫描显示状态
8.4.2 8255A连接的LED数码管显示器实例
1. 89C51和8255A的连接 89C51通过系统总线和8255A连接,其中: 89C51的P0口为8位双向数据总线,和8255A的
D0-D7相连。 89C51的P0口分时输出低8位地址信号A0-A7,
在本例中,没有使用低位地址。 89C51的P2口输出高8位地址信号A8-A15。 89C51的P3口中的P3.7 (RD)、P3.6 (WR)输出
移位寄存器串入出与并入串出
移位寄存器串入出与并入串出————————————————————————————————作者:————————————————————————————————日期:移位寄存器串入并出与并入串出在数字电路中,移位寄存器(英语:shift register)是一种在若干相同时间脉冲下工作的触发器为基础的器件,数据以并行或串行的方式输入到该器件中,然后每个时间脉冲依次向左或右移动一个比特,在输出端进行输出。
这种移位寄存器是一维的,事实上还有多维的移位寄存器,即输入、输出的数据本身就是一些列位。
实现这种多维移位寄存器的方法可以是将几个具有相同位数的移位寄存器并联起来。
移位寄存器的输入、输出都可以是并行或串行的。
它们经常被配置成串入并出(serial-in, parallel-out, SIPO)的形式或并入串出(parallel-in, serial-out, PISO),这样就可以实现并行数据和串行数据的转换。
当然,也有输入、输出同时为串行或并行的情况。
此外,还有一些移位寄存器为双向的,也就是说它允许数据来回传输,输入端同时可以作为输出端,输出端同时也可以作为输入端。
如果把移位寄存器的串行输入端,和并行输出端的最后一位连接起来,还可以构成循环移位寄存器(circular shift register),用来实现循环计数功能。
串入并出串入并出形式的移位寄存器接法,可以将输入的串行数据以并行格式输出。
串行通信要求的几位数据完成输入之后,就可以在输出端的各位同时读出并行数据。
并入串出并入串出形式的移位寄存器接法,通过下图所示D1-D4并行输入段接收4位外部并行数据,而Q为串行输出的引脚。
为了将数据写入到寄存器中,写/移位控制线必须保持低电平。
写入完成,需要移位时,写/移位控制线则必须处于高电平,而且必须给予时间脉冲,每提供一个时间脉冲,向左(或向右)移动一位。
计算机基础知识什么是输入输出(IO)操作
计算机基础知识什么是输入输出(IO)操作计算机基础知识:什么是输入输出(IO)操作计算机是一种用于处理数据的工具,而输入输出(IO)操作是计算机与外部世界进行数据交流的方式。
通过输入,我们可以将外部的数据传递给计算机进行处理,而输出则是将计算机处理后的数据传递给外部环境。
在本文中,我们将探讨输入输出操作的基础知识。
一、输入输出(IO)的概念输入输出是计算机与外部环境进行数据交流的方式。
输入是指将外部数据传递给计算机,供计算机进行处理和分析;输出则是将计算机处理后的数据传递给外部环境,供人们观察和使用。
在计算机系统中,输入输出设备起到了极为重要的作用。
例如,键盘、鼠标和触摸屏等输入设备用于接收用户的命令和数据,显示器、打印机等输出设备则用于向用户展示计算机处理的结果。
二、输入输出的分类1. 人机交互输入输出:这种输入输出方式主要是通过外部设备与人进行交互。
例如,使用键盘输入文字、鼠标点击图标进行操作、触摸屏选择菜单等。
同时,显示器将结果输出给人们观察。
2. 设备驱动程序输入输出:这种输入输出方式是通过设备驱动程序进行的。
计算机通过设备驱动程序与各类外部设备进行通信。
例如,打印机通过打印机驱动程序与计算机通信,将计算机处理的文档输出。
3. 文件输入输出:文件是计算机中存储数据的一种形式,也是计算机与外部世界交流的一种方式。
我们可以将数据存储在文件中,进行读取和写入操作。
三、输入输出的基本操作在计算机基础中,我们了解到输入输出操作的基本函数包括读取和写入。
读取是指从外部获取数据并传递给计算机进行处理;写入则是将计算机处理的结果传递给外部。
读取函数的基本形式如下:input(data):从外部读取数据,存储在变量data中。
写入函数的基本形式如下:output(data):将变量data中的数据写入外部设备,供外部环境使用。
四、输入输出的应用输入输出操作在计算机中得到了广泛的应用。
以下是一些常见的输入输出操作应用场景:1. 数据采集:许多科学实验、气象观测等需要收集大量外部数据,通过输入输出操作,这些数据可以传递给计算机进行进一步的分析和处理。
实验一 并行口输入输出

实验一并行口输入、输出实验一、实验目的1、学习并行口的使用方法2、学习延时子程序的编写和使用二、实验说明并行口是准双向口,它作为输出口时与一般的双向口使用方法相同。
由准双向口结构可知当P1口用作输入口时,必须先对口的锁存器写“1”,若不先对它写“1”,读入的数据是不正确的。
三、实验内容及步骤实验(一):用P1口做输出口,接八位逻辑电平显示,程序功能使发光二极管按照自己设计的花样点亮。
1、使用单片机最小应用系统1模块。
关闭该模块电源,用扁平数据线连接单片机P1口与八位逻辑电平显示模块。
2、连接计算机与仿真器,把仿真器插到模块的锁紧插座中,请注意仿真器的方向:缺口朝上。
3、打开Keil uVision2仿真软件,首先建立本实验的项目文件,接着添加P1_A.c源程序,进行编译,直到编译无误。
4、进行软件设置,首先选择软件仿真,仿真调试通过后,选择硬件仿真,设置波特率为串口38400(COM1),USB口115200(COM3或COM4)。
5、打开模块电源和总电源,点击开始调试按钮,点击RUN按钮运行程序,观察发光二极管显示情况。
发光二极管单只从右到左轮流循环点亮。
实验(二):用P1.0、P1.1作输入接两个拨断开关,P1.2、P1.3作输出接两个发光二极管。
程序读取开关状态,并在发光二极管上显示出来。
1、用导线分别连接P1.0、P1.1到两个拨断开关,P1.2、P1.3到两个发光二极管。
2、添加 P1_B.c源程序,编译无误后,运行程序,拨动拨断开关,观察发光二极管的亮灭情况。
向上拨为熄灭,向下拨为点亮。
实验(三):P1口做通用I/O输出口,控制8只发光二极管从左到右依次点亮并循环(同一时刻只有一盏灯亮)。
尝试采用头文件#include<intrins.h>;用函数_crol_(a,n)【将字符型变量a循环左移n位】来实现。
单片机常见输入输出模式

单片机常见输入输出模式单片机(Microcontroller,简称MCU)是一种集成电路,集中了处理器、内存、输入输出接口和定时器等功能模块,广泛应用于各种电子设备中。
输入输出(Input/Output,简称I/O)是单片机与外部环境进行信息交互的重要方式。
本文将介绍单片机常见的几种输入输出模式。
1. 并行输入输出模式并行输入输出模式是最常见的单片机与外设进行数据交互的方式。
在并行输入输出模式下,单片机与外设之间通过多个数据线同时传输多位数据。
这种模式的好处是传输速度快,但需要较多的引脚资源,适用于对传输速度要求较高的应用。
2. 串行输入输出模式串行输入输出模式是一种将数据逐位进行传输的方式。
在串行输入输出模式下,单片机与外设之间通过单个数据线逐位传输数据。
这种模式的好处是占用较少的引脚资源,适用于空间有限且对传输速度要求不高的应用。
3. 通用异步收发器模式通用异步收发器(UART)是一种单片机常用的输入输出模式。
UART内部有一个缓冲区,可以接收和发送数据。
在使用UART进行数据传输时,单片机通过配置相关寄存器的参数来设置波特率、数据位数、停止位等通信参数,然后可以通过读写缓冲区来进行数据的收发。
4. 并行输入捕获/输出比较模式并行输入捕获(Input Capture)和输出比较(Output Compare)是单片机中常用的定时器功能模式。
在这种模式下,单片机可以通过定时器模块捕获外部信号的边沿触发事件,并记录下触发事件的时间戳。
同时,单片机还可以通过定时器模块产生输出信号,并与外部信号进行比较。
这种模式适用于需要对时间进行精确控制的应用,如测量脉冲宽度、频率测量等。
5. 脉冲宽度调制模式脉冲宽度调制(Pulse Width Modulation,简称PWM)是一种将数字信号转化为模拟信号的技术。
在PWM模式下,单片机通过定时器模块产生周期固定的脉冲信号,并通过改变脉冲的占空比来模拟出不同的电平信号。
输入与输出系统的功能与协调
API调用
输出系统可以通过调用其他 系统的API接口获取数据。
数据处理
数据清洗
输出系统可以对检索到的数据进行清洗,包括去除重复数据、处 理缺失值、异常值等。
数据转换
输出系统可以将数据转换为所需的格式或数据结构,如将数据从一 种数据库格式转换为另一种数据库格式。
输入输出系统协调
分析输入输出系统之间的信息传递和协调机制, 研究如何实现高效、准确的人机交互,提高用户 的使用体验和工作效率。
02
输入系统的功能
数据采集
数据来源识别
确定数据采集的对象和范围,包括内部数据和外 部数据的识别。
数据采集方法
根据数据来源和采集需求,选择合适的数据采集 方法,如问卷调查、网络爬虫、传感器等。
多通道数据采集
支持多通道同时采集,提高数据采集的并行度和效率。
优化数据预处理算法
噪声滤除算法
采用滤波、平滑等算法,有效去除数据中的噪声干扰 。
数据归一化算法
将数据映射到特定范围内,消除数据间的量纲差异, 提高数据处理效率。
特征提取算法
通过特征提取算法,提取数据中的关键信息,降低数 据维度,提高处理速度。
不同数据格式之间的转换。
数据同步与异步处理
01
数据同步处理
指数据的输入和输出操作在同一时间内进行,即输入操作完成后立即进
行输出操作。这种方式适用于实时性要求高的场景,但可能导致等待时
间较长。
02
数据异步处理
指数据的输入和输出操作不在同一时间内进行,即输入操作完成后并不
立即进行输出操作,而是等待一段时间后再进行输出。这种方式可减少