一种雷达回波信号模拟器的设计与实现
一种雷达回波模拟器的研究与设计

DOI :10.19297/ki.41-1228/tj.2018.03.013一种雷达回波模拟器的研究与设计刘亭洲,王海锋,李乐怡(中国空空导弹研究院,河南洛阳 471009) 摘 要:为了满足各型雷达产品的测试要求,对雷达回波模拟器的要求越来越高,功能上也要求更加全面。
本文阐述了一种新型雷达回波模拟器的原理及实现方法,着重介绍了目标回波功能实现原理、微波链路单元设计、基带单元设计等内容,并对系统的关键模块进行了分析。
与传统雷达回波模拟器相比,增加了噪声干扰、假目标等设置。
该模拟器技术先进、功能齐备、工作稳定可靠,已运用于实际。
关键词:目标回波;微波链路;基带处理单元中图分类号:TJ760.1 文献标识码:A 文章编号:1673-5048(2018)03-0073-05 雷达产品的研制过程一般分为系统调试、内场调试、集成测试和外场测试等几个阶段,每个阶段都需要对雷达系统进行性能评估和系统验证,如果这些测试都通过真实的目标来实现,不仅耗资较大,而且条件也会非常苛刻,所以雷达回波模拟器的研究就显得非常重要。
1 功能及系统组成雷达回波模拟器采用高速数字化采样与处理技术,对雷达导引头输出的射频发射信号经下变频后进行数字化采样,对于采样的数据进行存储与调制,模拟目标的距离与速度特性,利用数字化处理可以方便地进行多目标模拟,也可以进行目标与干扰的模拟,以满足雷达产品在复杂电磁环境下性能考核的需要。
由于目标模拟完全在数字化采样后的基带进行,通过不同的模拟前端配置,模拟器可以满足不同波段回波模拟的要求。
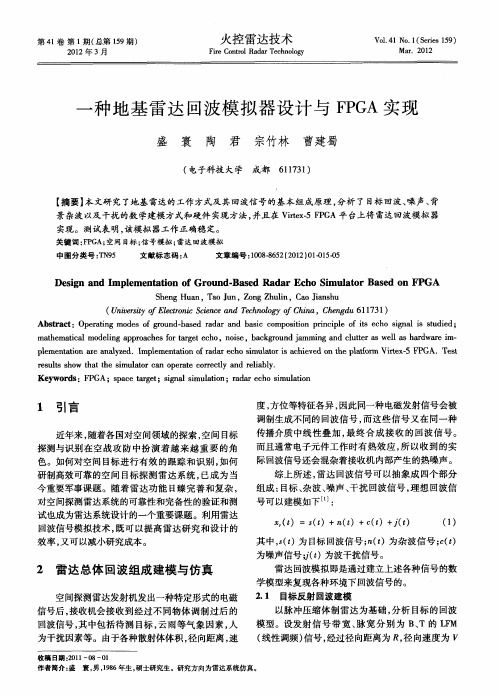
雷达回波模拟器由3个类似的通道组成,如图1所示。
2个目标通道,1个信号源通道,从而产生所需的多个不同距离、时间的目标信号及信号源信号,每个通道由微波链路单元、基带处理单元和显示控制单元等组成,组成框图如图2所示。
图1 雷达回波模拟器需求组成框图Fig.1 Requirements of radar echosimulators图2 雷达回波模拟器通道组成框图Fig.2 Block diagram of radar echo simulator channel 其中,控制单元主要用于接收仿真机的控制指令,然后传给每个目标通道的控制模块,进一步实现对系统可调整器件的控制,满足实时性要求;模型软件单元包含目标、干扰模型及信号源模式收稿日期:2017-10-18作者简介:刘亭洲(1990-),男,河南商城人,硕士,研究方向是雷达产品总体测试技术。
雷达回波模拟器系统设计与实现

雷达回波模拟器系统设计与实现雷达回波模拟器系统设计与实现引言:雷达回波模拟器是一种用于模拟雷达系统的测试和评估的关键设备,可以在实验室环境中模拟各种真实的雷达回波信号。
本文基于雷达回波模拟器的设计与实现,详细介绍了该系统的原理、结构、主要模块和软硬件实现。
一、系统原理雷达回波模拟器系统是通过生成合成的雷达回波信号,模拟雷达对目标的探测和跟踪的过程。
其主要原理是以真实的目标信息为基础,通过计算机算法和数字信号处理技术,生成与之相匹配的虚拟回波信号。
这些信号可以反映出不同目标的特性,如目标的速度、位置、形状等。
二、系统结构雷达回波模拟器系统主要由以下几个模块组成:1. 数据库模块:用于存储和管理各类雷达回波信号数据,包括目标特性、距离、速度、形状等数据。
2. 参数设置模块:提供用户界面,用于设置模拟器系统的参数,包括目标参数、雷达参数、环境参数等。
3. 目标生成模块:根据用户设定的目标参数,生成合成的虚拟目标回波信号。
4. 信道模拟模块:模拟雷达与目标之间的信号传播过程和环境对信号的影响,如衰减、多径效应等。
5. 雷达接收机模块:接收和处理经信道模拟后的回波信号,包括滤波、解调等。
6. 显示与分析模块:将处理后的回波信号以图形化的方式显示出来,并提供相应的分析工具,如波形分析、频谱分析等。
三、软硬件实现1. 系统硬件实现:系统硬件主要由计算机、数字信号处理器(DSP)、模拟前端电路、显示设备等组成。
计算机作为系统的主控制单元,负责整个系统的运行和控制。
DSP负责对目标回波信号进行数字信号处理,包括滤波、解调等。
模拟前端电路实现了雷达接收机的模拟电路功能,将接收到的回波信号转换为数字信号。
显示设备用于将处理后的回波信号以图形化的方式显示出来。
2. 系统软件实现:系统软件主要分为控制软件和信号处理软件两部分。
控制软件运行在计算机上,通过用户界面与用户进行交互,实现参数设置、数据管理、系统控制等功能。
信号处理软件则运行在DSP 上,负责对目标回波信号进行数字信号处理,生成合成的虚拟回波信号。
一种地基雷达回波模拟器设计与FPGA实现
研制高效可靠的空间 目标探测雷达系统 , 已成为当 今重要 军事 课 题 。随 着 雷达 功 能 日臻 完 善 和 复 杂 , 对 空间探 测雷 达系统 的可靠 性 和完备 性 的验 证 和测 试也 成 为雷达 系统设 计 的一个重 要课 题 。利用雷 达 回波信号模拟技术 , 既可 以提高雷达研究 和设计的 效率 , 可以减 小研究 成本 。 又
关 键 词 :P A; 间 目标 ; 号模 拟 ; 达 回 波模 拟 FG 空 信 雷
中图分类号 :N 5 T 9
文献标志码 : A
文章编号 :0 885 (0 2 O -1-5 10 -62 2 1 ) 1 50 0
De i n a d I p e n a i n o o nd. s d Ra r Ec o S m u a o s d n FPGA sg n m l me t to f Gr u Ba e da h i l t r Ba e o
一
种 地 基 雷 达 回波 模 拟 器设 计 与 F G P A实 现
盛 寰 陶 君 宗竹林 曹建蜀
( 电子科技 大学 成都 6 13 ) 17 1
【 摘要】 本文研究了地基 雷达的工作方式及其回波信号的基本组成原理 , 分析 了目标回波、 噪声、 背
景 杂波 以及 干扰 的数 学建模 方式和硬 件 实现 方法 , 且在 Va x5F G 并 ie- P A平 台上将 雷达 回波模 拟 器 实现 。测试表 明 , 该模 拟 器工作 正确稳 定 。
L 闭 干扰 关
2 3 2 速 度拖 引干 扰建模 ] ..
() 2
速度拖 引干 扰建模 如下 :
r
2 / VA
0≤ t< t, 停拖 期 1 t , 2≤ 关 闭期
新一代机载火控LPI雷达回波模拟器设计与实现

火 力 与 指 挥 控 制
F i r e Co n t r o l & Co m ma n d Co n t r o l
第 3 9卷 第 2期 2 0 1 4年 2月
文章编号 : 1 0 0 2 — 0 6 4 0 ( 2 0 1 4) 0 2 — 0 1 4 8 — 0 3
新一代机载火控 L P I 雷达 , 产生了几种典型的具有低截获性能 的雷达波形 , 并对其 回波信号进行计算机仿真 , 包括波 形的产生 、 目标 回波 、 环境杂波的建模 与仿真等 。该雷达 回波模拟 器可根据上位机 的指令 , 灵 活设置雷达 回波 的各种
参数 , 满足不同背景下 L P I 雷达回波信号仿真建模 与计算机模拟的需求 , 对于雷达波形 的 L P I 性能评估具有 实用性 。
wa v e f o r m de s i g n a n d r a d a r e c h o s i g n a l s i mu l a t i o n t e c hn o l o g y wh i c h c o n t a i n s t he s i mu l a t i o n o f t a r g e t
关键词 : 机载雷达 , L P I 技术 , 回波模 拟器 , 雷达波形设 计 , 环境模拟 中图分类号 : T P 9 5 5 文献标识码a t o r De s i g n f o r Ne w Ge n e r a t i o n Ai r b o r n e
Ab s t r a c t :L o w P r o b a b i l i t y o f I n t e r c e p t ( L P I )r a d a r i s t h e i n e v i t a b l e c h o i c e o f a e r i a l wa r s i n t h e
制导雷达回波信号模拟器设计

制导雷达回波信号模拟器设计作者:宋志刚来源:《中国科技纵横》2015年第06期【摘要】运用雷达信号模拟技术,研制了指令制导舰空导弹武器系统用目标模拟系统。
阐述了模拟器的系统结构、收发模块及基于数字储频技术的信号模拟模块硬件设计方法,构建出适用于指令制导武器完整作战过程的雷达信号模拟系统。
建立了指令制导武器系统多频段雷达回波信号幅度、结构、多普勒频率等参数模型。
【关键词】制导雷达 ;回波模拟器 ;DRFM ;FPGA雷达回波信号模拟器广泛应用于雷达调试、试验及雷达对抗等领域,能够逼真模拟雷达信号替代实际回波。
本文基于DRFM技术设计一种雷达回波模拟器,用于模拟指令制导导弹武器作战过程中相关雷达信号,通过接收搜索警戒雷达、跟踪制导雷达等的辐射信号,经过存储和分析,变换和转发,模拟搜索警戒雷达、跟踪制导雷达,导弹制导指令等不同频率回波信号,代替实际配合目标,保障武器系统完成从搜索、目指、跟踪制导全过程。
1 硬件设计1.1 系统结构模拟器采用数字射频存储器(Data Radio Frequency Memory,DRFM)+上位机结构。
主要由DRFM单元、接收机、发射机、频率综合器、收发天线及上位机(CPU板)组成,如图1所示。
模拟器接收天线接收雷达辐射的射频信号送入接收机,射频信号经放大、下变频,转化为中频信号由DRFM进行采集、存储,按要求生成目标和杂波信号,并调制到数字中频信号上,经数模转换输出模拟中频信号,送发射机;发射机进行上变频,将中频信号转换为射频信号,经发射天线向空间辐射,供相应雷达接收。
为了保证模拟器接收信号的频率与发射信号的频率一致,需要高稳定度的频率合成器及为发射机和接收机提供上变频和下变频所需的本振信号。
1.2 收发模块设计收、发模块分别集成于一块6U插板。
接收模块由宽带射频模块、射频下变频模块和中频下变频模块构成,如图2所示。
实现接收雷达发射的宽带射频信号,进行滤波、增益控制和放大。
雷达目标回波模拟研究与实现
舰 船 电 子 对 抗
SH I PBOA RD EIECTR ON I COU N TERM EA SU RE C
J n 2 1 u .02
V O . o. 1 35 N 3
第 3 卷 第 3期 5
雷达 目标 回波模 拟研 究 与实现
张坤 峰 , 杰 罗
俯 仰角 :
E,一
2 仿 真 模 型
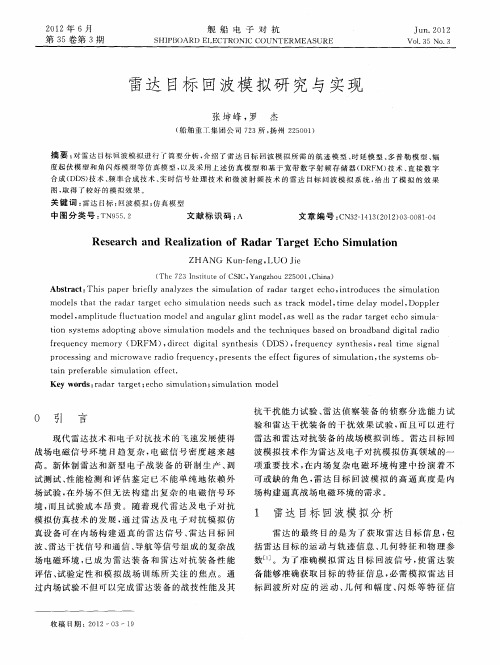
2 1 坐标 系及坐 标转 换模型 . 雷 达 目标运 动航迹 的建立 和表 征首 先需建 立确 定 的坐 标系 , 此处 选 用 的坐 标 系 为 大地 雷 达测 量 坐 标 系 。所谓 大地雷 达测 量坐标 系是 以雷 达天线 为坐
一 a R O ( r R ≠ 3 j c s )
1 …c () ≥ 8 t 吣> 0 a n o
9 z > 0, 一 0 0, y
A 一
8 … rn ) 0 c( t a
2 0, < 0, 一 0 7 z y
㈩
3+8.c ( < > 6 1 aa 0 0 rn t ) 0
斜距 :
R 一 x。+ y + Z () 2
X斗 1= X R斗 + 1・{i( 1・△丁/ 1 s V汁 n R )・sn + i0
k ・ o 0・ 1 c sV斗 A / 1] l c s F 一 o ( l・ T R斗 ) }
图 1 大 地 雷 达 测 量 坐标 系 直 角 坐标 及 极 坐 标 系定 义
( 6) 1
( )大 地雷 达测量 直 角坐标 系 到极 坐标 系 转换 1
收稿 日期 :2 1 0 2—0 3—1 9
8 2
舰 船 电 子 对 抗 的数 学模 型如下 :
一种新型雷达高度表回波信号模拟器的设计与实现

文章编号 : 1671 -4598( 2011) 02 -341 -03
计 算机 测量 与 控制 . 2 011. 1 9( 2) Computer Measurement & Control
中图分类号 : T P391 文献标识码 : A
341
一种新型雷达高度表回波信号模拟器的设计与实现
342
计算机测量与控制
第 19 卷
达照射面内所有面 元的 回波 信号 进行 矢量 叠加 得到 雷达 接收 信号。 2 1 单元回波计算模型 为了得到雷达回波时域波形 , 先将雷达方程改写成时间的 函数。考虑使用收发共用天线 , 雷达接收的瞬时功率表达式 [ 6] 如下 : P R ( t) = P T ( t )
Abstract: T he des ign and implemen tat ion m et hod of a new radar alt im et er echo s imulat or is proposed in t his paper. T he simu lat or uses t w o met h ods t o realize t he sim ulati on of t he radar alt imet er echo, on e i s based on t h e act ual f lying t est acquis it ion echo, an d t he ot her one is b as ed on mat hemat ic model. T he mat hemat ic model is derived f irst , t he design of sys tem archit ect ur e and each sub- m odul e is in tr odu ced in det ail , w hich is bas ed on s oft w ar e radio techn ol ogy. T heoret ical anal ysis and practi cal t es tin g proved t hat t h e s imulat or can simulat e t he real radar gr ou nd echo in diff erent t errain condit ions. Key words: radar alt imet er; echo; sim ulator; mat hemat ic m odel; sof t ware radio
一种宽带雷达回波信号模拟器设计

根据 St ret ch 原理, 若 R$= R- Rref , 其差频输出为
sr 3 ( t ) =
sr1
(
t)
s* ref
(
t
)
( 5)
即
sr3 ( t) =
rect( t -
2R T
/
c)
exp[
-
j
4P B cT
(t-
2R ref c
)
R
$
]
#
exp[ -
j 4cPf c R$ +
j
4PBR Tc2
DAC 模式和正交调制模式。单点频模式是指通过 内部集成 的 DDS 核 直接 生成 单点 频 信号; 内 插 DAC 模式是指将并行数据接口输入的数字信号通 过数模转换直接输出; 正交调制模式是指基带 I、Q 数据经过数字调制后再进行数模转换输出。本文 中选用的是正交调制模式, 该模式下 AD9957 的内 部结构如图 4 所示。
生信号带宽大、易于编程等特点, AD 公司 最新的 DDS 芯片最大可产生 400MH z 带宽的基带信号, 但 是由于它的信号形式是固化在 DDS 芯片内部的, 所 以只能产生正弦波、三角波等几种简单的波形, 不 能满足雷达回波信号复杂的要求; 第二种方式, 即 采用 FP GA+ 双高速 DA 结构的方式, 同样具有产 生信号带宽大的特点, 由于这种方式采 用 FPGA 产生基带信号, 因此可以产生复杂的信号形式, 但 是这种方式在双 DA 后还要加模拟调制器和混频 器, 这部分电路都是工作在模拟部分, 在 I/ Q 相位 对齐和噪声抑制方面都有一定困难; 第三种方式, 即采用 F PGA+ 专用正交数字上变频芯片的方式, 带宽相对前两种方式而言较窄, 但是这种方式 既 可以产生复杂的回波信号, 同 时信号的调制以 及 初级混频均在数字域完成, 避 免了模拟器件给 信
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种雷达回波信号模拟器的设计与实现
R c i g i a D s n Ip m n t oa d r o n l u tr ei ad l et i f a a E h S aSm lo g n m e aon
ss m; G yt e F A P
出 信号还可设定为 T , S 种形式, T L L D 等多 V 实现了 O ( sm S C t se y o cp。 n ) 此外, P A 有开发周期短, 具 h i FG 还 并 有在线 可重 路中
复编程的功能。因此,本系统采用一片FG 来实现。 PA
然后确定从输入信号到输出信号要经过的处理流程。输入 的一帧信号,应首先经过一数据分流器,将第一个表示延迟时 间长度的数据存入到控制延迟时间长度的计数器的计数长度寄 存器中, 再把 4 个浮点 目 0 标回波数据经过一个浮点数变定点数 转换器变成定点数。以利于后边的计算, 然后把这 4 个定点数 0 据与 4 个符合一定信噪比的噪声数据和 4 0 0个符合一定功率普 密度的杂波数据相加,即作数据合成。噪声是由噪声发生器产 生的一路噪声, 经一乘法器, 乘以代表某信噪比的系数得到的; 杂波是由噪声发生器产生的另一路噪声,经 FR滤波器,得到 I 的符合一定功率谱密度的杂波。 输出数据经过前述的延迟时间, 就可以被输给 DA 转换器了。另外,由于输入数据是从 C C / PI 母板的A S210 i D P 16 的l k口传到系统的, i n 而lk口只有 8 n 位宽, 所以, 传输一个 犯 位数据需分4 次。因此, 本系统的输入端还 有一个数据打包模块, 把从 A S210 i 连续传来的4 D P 1 的lk口 6 n 个8 位数据拼成一个 犯 位数据。 另外,母板的控制命令经P II P I 传至本系统的 C ,线由 C接口 ' 控制模块,由控制模块变成相应的控制命令,协调各个模块的 工作。 下级处理机反馈的控制信号, 状态信号也经AD /转换电路 或其他通路进入命令缓存器, 再经P I C接口模块传给母板。 系统 的总体结构如图2 所示。
处理器做数据合成计算,由于软件算法在执行时顺序性,限制
总系统设计
首先,明确输出信号、输入信号的种类、波形;对输入信 号做何种处理才能得到输出信号。
《 测控技术》20 年第 2 卷增刊 04 3
FP GA
LF T ! 延 PO U 迟1
D/ OUT A
延迟 2
S YS UT O
定点数
S YS I N
NOI E S I N
图 1 从输出信号推导输入信号
模拟器的输出信号即如图 1 P 的L F的输出信号,它是在每 个P F的上沿后延迟一定的时间发出的,这是因为目 R 标与雷达 间存在的距离,使雷达在每个 P F脉冲后的 t 2I) R ( RC时间后, = 才能收到目 标回波幅度信息。由此可推得 DA的输出波形,进 / 而可以推得 DA的输入, / 也即本系统的输出, 它是 4 个含有噪 0 声和杂波信息的 1 位定点数, 6 以供给后级的DA转换器 ( / 因为 DA转换器只能接受定点数) / 。由于本系统的输出含有 4 个信 1 息,即一个延迟时间长度信息,4 个含有噪声和杂波的目 0 标回 波幅度信息,则本系统应当在每个 P F上沿后输入 4 个目 R 1 标 信息的数据和 4 个噪声与 4 个杂波数据。其中目 0 0 标数据的第 一个是延迟时间长度, 4 个目 后 0 标数据是表示目 标回波幅度的 3 位浮点数。噪声和杂波信号也是输入信号,但它们是由片内 2 的噪声发生器的两路相互独立的噪声输出经处理后产生的。噪 声输入信号应符合要求的信噪比,杂波输入信号应符合一定的 功率谱密度。 R P F也是输入信号, 它的频率是 10 z 脉宽是 0k , H
文献[ 和文献[ 对模拟器的系统构成、 [ 中 1 ] 2 1 数据合成等作了 较详细的描述,但它的噪声/ 杂波数据是由P C机产生的,不能
满足实时性要求。 本系统采用 i XlX 的 F G -ieH 0 Vr x 系列 i n P AVr x 5 . eH t 0 i t FG P A是高性能、高密度、低功耗的可编程逻辑器件。它有 5 0 万个逻辑门,56 B的 B A 7K R M, 个 1 位x8 3 2 8 1 位硬件乘法器, 8 DM ( 个 C 数字时钟管理) 6 ,24个通用 U ,可配置成 L D O VS 输出。在设计时,将杂波噪声发生模块嵌入 F G P A中,即使之 成为片内噪声发生器,它能产生高斯分布,指数分布,瑞利分 布及均匀分布四种分布随机数,随机数的合成速度不低于 4 0
比 理 大 子 程 北 08 京 工 学电 工 系 京10)王 艾,黄 默,曾 涛 01
摘要:本文提 出了一种基于C C 母板和 P PI MC背板的通用雷达
回波模拟器的设计与实现,重点介绍了 基于单片 FG 设计 PA P 背 MC 板,实 现雷达回波信号模拟器数据合成 ( 噪声/ 目 杂澎
标回波) 的设计方法。包括快速加法器, 快速乘法器, 快速 FR I 滤波器, P I C 接口等模块.该系统具有通用性强,实时性强, 接口方便等特点。 关键词:C C 母板;P PI MC背板;雷达模拟;数据合成系统;
F GA P
了它在高速和实时系统中的应用。现在,C L /P A S 技 P DFG 和D P 术结合,能够在集成度, 速度和系统功能方面满足应用的需要, 比如,用F G P A实现的8 位FR 阶8 I 滤波器 的处理速度可达 14 P , 0MSS 而用D P S 芯片实现同样的速度则需要指令执行速度达 82 P 的芯片,而后者的价格和开发成本比前者高得多。而 3MIS 且,F G P A内部可提供R M,双 口 A A R M和FF -A IOR M供存储数 据使用,因此可以将FR I滤波器,加法器,乘法器,接口,控制 电路连同存储器做在一片F G 中, P A 形成一个数据处理系统。 输
中图分类号:T 97 N5 文献标识码:A A s at B s o C C ba ad , ds n d bt c a d P I r n P r : e n o d MC t ei a h e g n ip m n tn a m n a eh s nl u t a pt m l eti o cm o r r o a s lo r u e ao f o a c i d g i a r m e f w r. e i o t P C i olhs nlF G o o a T ds n h M w c n aa e A r d h e g f e h h y s g P i n i n t ip m n t n f o e,u et gt) a t d e l eti o ( i s lt ,r ' dt , a h m e ao n s c tra es a sn e zd t i a a eh s nl u t ,c d g yt s e ss m r r o a s loi l i t h i y e n a c i d g i a rn u n h m e m dl s h h ed dr i sed l lr i sed ou r o i s e a eh h e m t i,g pe a f p g d ,g p ui eh h p FR eP I r c,e tu r i rdcd I ft, i e ae rprcl l n oue. i r C n f a a i ay l t t K y rsC C ba ; ;dr ua r dtsn ei d e w d: I r P r as lo; a t s e o P o d MC a i t a y h z m
1 o IS l
图 2 系统总框图
由于本系统处理数据的最大的单位是帧,而不是 ( 由多帧 组成的) 块,因此,数据只需分成祯和单个数据两个层次。 首先分析处理一帧数据所需要的时间。从输入输出时序图
可知每个 P T 内必须处理一祯数据。但若使整个系统在一个 R
P T 内只处理一帧数据,则时间不够。因为当系统时钟是 4 R 0 MH ,且输入数据的采样率和输出数据的 DA 的时钟也是 4 z / 0 MH 时,Ln z i k口输入数据就至少需占用 25x4x= 6 z 2kx 143 MH , 而其他的运算,如浮点数变定点数,杂波/ 噪声与目 标数据的相 加,都比输入数据还复杂,因而它们所用的时间比输入数据的 时间多。因此,一帧数据无法在一个 P T内走完从系统的输入 R 端到系统的输出端的全部处理单元并输出,只有将 P T的时间 R 拉长,即降低 P F R ,才能实现在一个 P '内当场处理并输出一 R, I 帧数据。但是,这样系统输出的信号因P F的降低,而比真实 R 的雷达信号J 漫,即输出信号的实时性变差了。为了保证输出信 号的实时性,本系统采用流水线技术,让整个系统在一个 P T R 内同时处理多帧数据,即让各个处理单元并行工作,同时处理 不同的帧的数据。流水线技术,就是在每个处理单元的输出加 缓存器,缓存器的深度为一帧,缓存器的个数为 2个,一只叫 乒缓存器,一只叫乓缓存器,且用电路保证前级处理单元向其 后的乒缓存器存前级对本帧数据的处理结果时,后级处理单元 织能从前级乓缓存器中取上一帧的前级处理结果,反之亦然。 这样, 前后级处理单元就不会在同时读写同一缓存器内的数据。 因此在前级向乒缓存器中存前级处理结果的同时,后级从前级 的乒缓存器中取操作数做处理,也即前级处理与后级处理同时 进行,实现了处理单元的并行工作。本系统并行处理的时序如 图3 所示,输出单元输出帧 1 时,加法器单元正在对帧 2 做数 据融合, 而浮点定点转化单元正在对帧 3 做浮点到定点的转化, 输入单元正在输入帧 4 。这样,每个处理单元的可用的处理时 间都是一个 P T 而不是采用流水线技术以前的约 1 个P T R, / 3 R, 因此,不必拉长 P T来保证有足够的时间处理完一帧数据,则 R 输出信号因 P T不变而使实时性得到了保证。杂波和噪声数据 R 也照此处理。