东南大学通信复试数字信号处理(吴镇杨)课后答案
数字信号处理(吴镇扬)课后习题答案(比较详细的解答过程)第一章测试训练题t
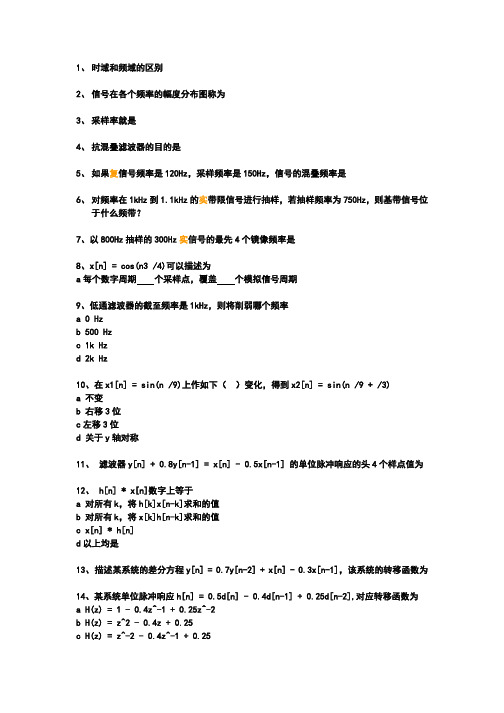
1、时域和频域的区别2、信号在各个频率的幅度分布图称为3、采样率就是4、抗混叠滤波器的目的是5、如果复信号频率是120Hz,采样频率是150Hz,信号的混叠频率是6、对频率在1kHz到1.1kHz的实带限信号进行抽样,若抽样频率为750Hz,则基带信号位于什么频带?7、以800Hz抽样的300Hz实信号的最先4个镜像频率是8、x[n] = cos(n3 /4)可以描述为a每个数字周期 个采样点,覆盖 个模拟信号周期9、低通滤波器的截至频率是1kHz,则将削弱哪个频率a 0 Hzb 500 Hzc 1k Hzd 2k Hz10、在x1[n] = sin(n /9)上作如下( )变化,得到x2[n] = sin(n /9 + /3)a 不变b 右移3位c左移3位d 关于y轴对称11、滤波器y[n] + 0.8y[n-1] = x[n] - 0.5x[n-1] 的单位脉冲响应的头4个样点值为12、h[n] * x[n]数字上等于a 对所有k,将h[k]x[n-k]求和的值b 对所有k,将x[k]h[n-k]求和的值c x[n] * h[n]d以上均是13、描述某系统的差分方程y[n] = 0.7y[n-2] + x[n] - 0.3x[n-1],该系统的转移函数为14、某系统单位脉冲响应h[n] = 0.5d[n] - 0.4d[n-1] + 0.25d[n-2],对应转移函数为a H(z) = 1 - 0.4z^-1 + 0.25z^-2b H(z) = z^2 - 0.4z + 0.25c H(z) = z^-2 - 0.4z^-1 + 0.25d 非以上答案15、极点为0.5 + j0.8和0.5 - j0.8,零点为-1.2的滤波器是a 稳定的b 边缘稳定c 不稳定d 不能决定16、滤波器的单位脉冲响应的DTFT给出了滤波器的a 频谱b 频率响应c 幅度d 相位17、频谱图平坦的信号对应如下哪个信号a 正弦信号b 方波c 白噪声d 直流信号18、离散实正弦信号的频谱的一个周期中包括a 无峰点b 1个峰点c 2个峰点d 多于2个峰点19、讨论连续非周期与离散非周期信号(即连续非周期信号采样前后)以及连续周期与离散周期信号(即连续周期信号采样前后)这四种信号频谱的周期性和连续性,并总结其规律性。
数字信号处理_吴镇扬_习题解答 第二版

1. 解丗由题意可知 N=5
则周期为丗其中为整数丆且满足使N为最小整数。
2. •i1•j解丗由题意可知 N=14
则周期为丗
•i2•j解丗由题意可知 N= 8
则
则所求周期 N=14
最小公倍数丆即为丗56
3.19 (1)周期卷积的主值序列为丗f(n)R(n) ={6,3, 6,10,14,12,9};
(2)循环卷积f (n) ={6,3, 6,10,14,12,9};
•i3•j线性卷积为f(n) ={1,3, 6,10,14,12,9,5, 0, 0, 0, 0}
2.21 •i 第二种方法乯按频率抽取算法丗输入顺
序丆
输出倒序(0,8,4,12,2,10,6,14,1,9,5,13,3,11,7, 15);
4
共有4(16=2*2*2*2 )节
第一节丗数据点间距、蝶形类型均是8•C
0 1 2 3 4 5 6 7
所乘因子丗W ,W ,W ,W ,W ,W ,
W ,W ;
N N N N N N N N N
第二节丗数据点间距、蝶形类型均是4 •C
0 2 4 6
所乘因子丗W ,W ,W ,W ;
N N N N
0 4
第三节丗数据点间距、蝶形类型均是2 •C所乘因
子丗W ,W ;
N N
第四节丗数据点间距、蝶形类型均是1 •C所乘因
子丗W ;
N。
数字信号处理课后习题答案(吴镇扬)

习题一 (离散信号与系统)1.1周期序列,最小周期长度为5。
1.2 (1) 周期序列,最小周期长度为14。
(2) 周期序列,最小周期长度为56。
1.5()()()()()()()11s a s s s a n s s a s n X j x t p t X j ΩP j Ω2n τn τj sin j Ωjn e X 2n π2n n τj Sa X j jn e 2T 2πττ∞=-∞∞=-∞Ω==*⎡⎤⎣⎦ΩΩ⎛⎫-=-Ω ⎪⎝⎭ΩΩ⎛⎫-=Ω-Ω ⎪⎝⎭∑∑F 1.6 (1) )(ωj e kX (2) )(0ωωj n j e X e (3) )(21)(2122ωωj j e X e X -+ (4) )(2ωj e X1.7 (1)0n z -(2)5.0||,5.0111>--z z(3)5.0||,5.0111<--z z(4)0||,5.01)5.0(11101>----z zz1.8 (1) 0,)11()(211>--=---z z z z z X N (2) a z az az z X >-=--,)1()(211(3)a z az z a az z X >-+=---,)1()(311211.9 1.10(1))1(2)(1----+n u n u n (2))1(24)()5.0(6--⋅--n u n u n n (3))()sin sin cos 1(cos 000n u n n ωωωω++(4) )()()(1n u a a a n a n ---+-δ1.11 (1) )(1z c X - (2) )(2z X (3) )()1(21z X z -+ (4) -+<<x x R z R z X /1/1),/1(1.12 (1)1,11<-ab ab(2) 1 (3) 00n a n1.13 (1) 该系统不是线性系统;该系统是时不变系统。
数字信号处理(吴镇扬)课后习题答案(比较详细的解答过程)chap6
至今, 至今,我们讨论的信号处理的各种理论与算法 视为恒定值, 都是把抽样频率 f s 视为恒定值,即在一个数字系 统中只有一个采样率。 统中只有一个采样率。 在实际数字信号处理系统中, 在实际数字信号处理系统中,经常会遇到采样 率转换问题。 率转换问题 。 或者要求一个数字系统能工作在 多采样率”状态, “多采样率”状态,或者要求其将采样信号转换 为新的采样率下工作。 为新的采样率下工作。
6.2 信号的插值
如果将 x(n) 的抽样频率 f s 增加 L 倍, w(n), w(n) 即 得 的插值,用符号↑ 表示。插值的方法很多, 是对 x(n) 的插值,用符号↑L 表示。插值的方法很多, 一个简单的方法就是信号抽取的逆处理过程。 一个简单的方法就是信号抽取的逆处理过程。 回想信号抽取前后的傅立叶变换关系
而 X 1 (e ) =
jω n = −∞
∞
∑ x ( n ) p ( n)e
− jωn
1 M −1 j 2πnk / M − jωn = ∑ [ x ( n) ]e ∑e n = −∞ M k =0 1 M −1 = X (e j (ω − 2πk / M ) ) (6.3b (6.3b) ∑ M k =0
信号抽取示意图,M=3, 图6.1.1 信号抽取示意图,M=3,横坐标为抽样点数 原信号; 中间信号; (a)原信号;(b)中间信号;(c)抽取后的信号
显然
X ′(e ) = ∑ x′(n)e
jω n = −∞ ∞ n = −∞ ∞
∞
− j ωn
= ∑ x( Mn)e
n = −∞
∞
− j ωn
= ∑ x1 ( Mn)e − jωn = X 1 (e jω / M ) (6.3a) (6.3a
吴镇扬数字信号处理课后习题答案
jw0 n
u (n)] e jw0n z n
n 0
1 1 (e jw0 z 1 )
(1) 解:令 y (n) RN (n)
由题意可知,所求序列等效为 x (n 1) y (n) y (n) 。
Z [ y (n)] z n
n 0
N 1
1 zN z N 1 , 1 z 1 z N 1 ( z 1)
1
A B 1 2 1 1 1 1 z 1 2z 1 z 1 2 z 1 B 1 | 1 2 1 z 1 z 1 2
1 | 1 1 1 2 z 1 z 1
x(n) u (n) 2 2 n u ( n 1) u (n) 2 n 1u ( n 1)
n0
若n0 0时,收敛域为:0 z ;
(2) 解: Z [0.5 u (n)]
n
若n0 0 时,收敛域为: z 0 z 0.5
0.5
n 0
n
z n
1
1 , 1 0.5 z 1
n
(3) 解: Z [ 0.5 u ( n 1)]
n
n
j j 1 1 (3) X (e 2 ) X ( e 2 ) 2 2 j
(2) e
j n0
X (e j ) (移位特性)
2
数字信号处理习题指导
G ( z ) ZT [ x (2n)] G( z)
n
g ( n )e
jwn
令n' 2n, 则
n ' 取偶数
( z 5) z n |z 0.5 (1 0.5 z)
数字信号处理(吴镇扬)课后习题答案(比较详细的解答过程)chap5-6PPT课件
-
6
5.6.1.2 哈佛结构
数字信号处理一般需要较大的数据流量和较 高的运算速度,为了提高数据吞吐量,在数字 信号处理器中大多采用哈佛结构,如图5.6-2。
程序总线
数据总线
程序 存储器
CPU
操作数 存储器
图5.6-2 哈佛结构
-
7
与冯.诺曼结构处理器比较,哈佛结构处理 器有两个明显的特点:
(1)使用两个独立的存储器模块,分别存储 指令和数据,每个存储模块都不允许指令和数 据并存;
,而是数据的组织和地址的产生。以FFT运算为
例,要求并行存取N/2个数据点,由于一般的存
储器在每个周期里只能在总线上传输一个数据,
因此,并行处理要有专门的缓冲区以要求的吞吐
率来高速度地供应数据,数据地址也必须高速产
生。
-
19
5.6.2 DSP硬件构成
典型的DSP处理器中的运算/处理功能单元 主要包括以下几个部分:
•采用哈佛结构(多总线结构,即程序存储器 和数据存储器分开,各有各的总线,或地址总 线和数据总线分开),甚至采用多地址总线 和多数据总线。还采用流水线及并行结构。
-
2
5.6.1 数字信号处理器结构特点
5.6.1.1 冯.诺曼结构 1945年,冯.诺曼首先提出了“存储程序”
的概念和二进制原理,后来,人们把利用这种 概念和原理设计的电子计算机系统统称为“冯. 诺曼型结构”计算机。冯.诺曼结构的处理器使 用同一个存储器,经由同一个总线传输,如图 5.6-1。
期的循环操作足够长时,或是对一系列数据反
复执行同一指令时,采用流水线处理方式才是
合理的。
-
17
5.6.1.4 并行处理
加快运算速度的另一种方法是采用并行处 理,这种方法克服了流水线方法要把一个处理 分解为若干子处理的困难。
数字信号处理(吴镇扬)第一章习题解答
提示:与理想采样信号的频谱进行比较。上述过程是物理采样后的频谱。
1.6解:
(1) (性质1)
(2) (性质4)
(3)
(4)1.7(1)Fra bibliotek:(2)解:
(3)解:
(4)解:
(5)解:
1.8 (1)解:令
由题意可知,所求序列等效为 。
而
故:
(2)解:
因为:
所以,
1.10 (1)解:
,为双边序列
本小题采用部分分式法求逆Z变换,可以使用“留数法”…..
所以
(3)解:
1.18y(n)=1,n=0
y(n)=3*2-n,n≥1
解:
1.19
(1)解:
无论 还是 ,右边序列的围线C内包含 两个极点。
当 时
当 时
因此
思考:1、为何讨论当 时的情况;2、为何不用讨论 的情况
解答过程如下:
(2)解:
右边序列的围线C内包含 一个极点。故
当 时
因此,
思考:1、为何只讨论当 时的情况
(3) 当n0>0时,该系统是因果系统;当n0<0时,该系统是非因果系统;系统稳定。
(4)因果、稳定。
(5)因果、稳定。
(6)因果、稳定。
(7)因果,但由于 。
(8) 在 时刻有值,故非因果。由于 的值都在 的时刻内,那么 ,故系统稳定。
1.17解:由图可知:
所以
(1)解:
(2)解:
通解
特解
带入方程得:
(3)解:
当 时,右边序列的围线C内包含 两个极点。故
因此
第1章
1.解:由题意可知
则周期为: 其中 为整数,且满足使N为最小整数。
数字信号处理》课后作业参考答案
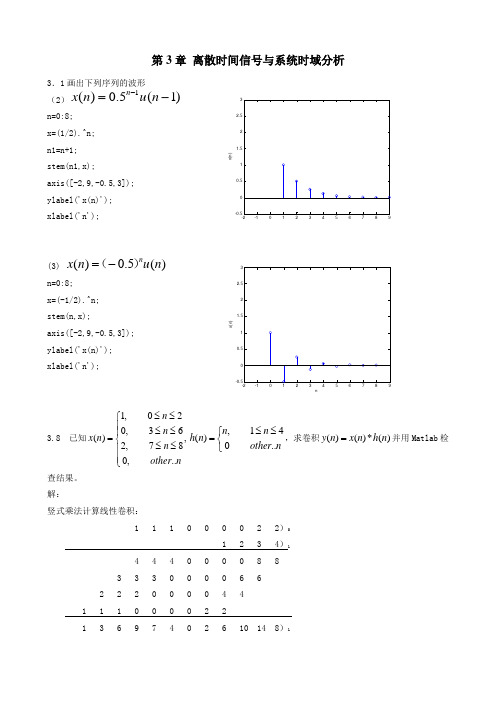
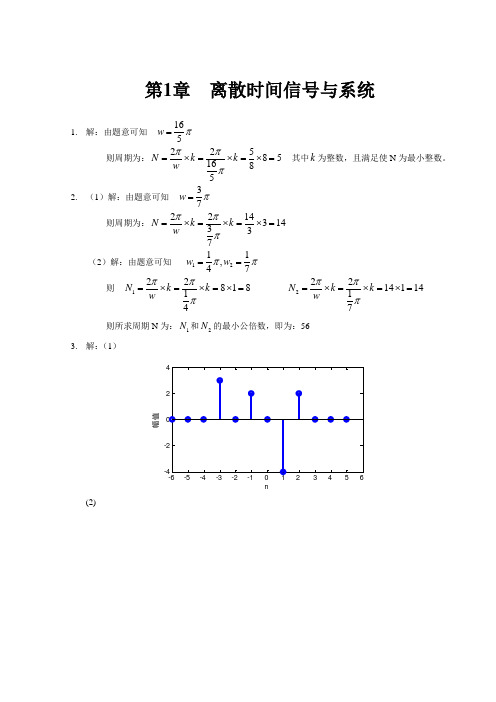
第3章 离散时间信号与系统时域分析3.1画出下列序列的波形(2)1()0.5(1)n x n u n -=- n=0:8; x=(1/2).^n;n1=n+1; stem(n1,x);axis([-2,9,-0.5,3]); ylabel('x(n)'); xlabel('n');(3) ()0.5()nx n u n =-()n=0:8; x=(-1/2).^n;stem(n,x);axis([-2,9,-0.5,3]); ylabel('x(n)'); xlabel('n');3.8 已知1,020,36(),2,780,..n n x n n other n≤≤⎧⎪≤≤⎪=⎨≤≤⎪⎪⎩,14()0..n n h n other n≤≤⎧=⎨⎩,求卷积()()*()y n x n h n =并用Matlab 检查结果。
解:竖式乘法计算线性卷积: 1 1 1 0 0 0 0 2 2)01 2 3 4)14 4 4 0 0 0 0 8 83 3 3 0 0 0 0 6 62 2 2 0 0 0 0 4 41 1 1 0 0 0 02 21 3 6 9 7 4 02 6 10 14 8)1x (n )nx (n )nMatlab 程序:x1=[1 1 1 0 0 0 0 2 2]; n1=0:8; x2=[1 2 3 4]; n2=1:4; n0=n1(1)+n2(1);N=length(n1)+length(n2)-1; n=n0:n0+N-1; x=conv(x1,x2); stem(n,x);ylabel('x(n)=x1(n)*x2(n)');xlabel('n'); 结果:x = 1 3 6 9 7 4 0 2 6 10 14 83.12 (1) 37πx (n )=5sin(n) 解:2214337w πππ==,所以N=14 (2) 326n ππ-x (n )=sin()-sin(n)解:22211213322212,2122612T N w T N w N ππππππ=========,所以(6) 3228n π-x (n )=5sin()-cos(n) 解:22161116313822222()T N w T w x n ππππππ=======,为无理数,所以不是周期序列所以不是周期序列3.20 已知差分方程2()3(1)(2)2()y n y n y n x n --+-=,()4()nx n u n -=,(1)4y -=,(2)10,y -=用Mtalab 编程求系统的完全响应和零状态响应,并画出图形。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
习题一 (离散信号与系统)1.1周期序列,最小周期长度为5。
1.2 (1) 周期序列,最小周期长度为14。
(2) 周期序列,最小周期长度为56。
1.5()()()()()()()11s a s s s a n s s a s n X j x t p t X j ΩP j Ω2n τn τj sin j Ωjn e X 2n π2n n τj Sa X j jn e 2T 2πττ∞=-∞∞=-∞Ω==*⎡⎤⎣⎦ΩΩ⎛⎫-=-Ω ⎪⎝⎭ΩΩ⎛⎫-=Ω-Ω ⎪⎝⎭∑∑F 1.6 (1) )(ωj e kX (2) )(0ωωj n j e X e(3) )(21)(2122ωωj j e X e X -+ (4) )(2ωj e X1.7 (1) 0n z-(2) 5.0||,5.0111>--z z(3) 5.0||,5.0111<--z z(4) 0||,5.01)5.0(11101>----z zz1.8 (1) 0,)11()(211>--=---z z z z z X N (2) a z az az z X >-=--,)1()(211(3) a z az z a az z X >-+=---,)1()(311211.91.10 (1) )1(2)(1----+n u n u n (2) )1(24)()5.0(6--⋅--n u n u n n (3) )()sin sin cos 1(cos 000n u n n ωωωω++(4))()()(1n u a a a n a n ---+-δ1.11 (1) )(1z c X - (2) )(2z X (3) )()1(21z X z -+ (4) -+<<x x R z R z X /1/1),/1(1.12 (1)1,11<-ab ab(2) 1 (3) 00n a n1.13 (1) 该系统不是线性系统;该系统是时不变系统。
(2) 该系统不是线性系统;该系统是时不变系统。
(3) 线性系统时不变系统。
(4) 线性系统时不变系统。
(5) 线性系统时变系统。
1.14 (1))7()5(2)3()1(4)1(4)(-----+-++=n n n n n n y δδδδδ(2) ⎩⎨⎧≥-≤≤-=-5)5.02(5.0405.02)(44n n n y n n (3) )5(8)4(4)3(6)2(3)1(2)()(-----+-+-+=n n n n n n n y δδδδδδ1.16 (1) 因果、稳定。
(2) n 0<0时系统非因果,不稳定。
(3) 当n 0>0时,该系统是因果系统,当n 0<0时,该系统是非因果系统;系统稳定。
(4)因果、稳定。
(5)因果、稳定。
(6)因果、稳定。
(7)因果、不稳定。
(8)非因果、稳定。
1.17 (1) y(n)=1, n =0 y(n)=4*3-n , n ≥1 (2) )(])31(2123[)(n u n y n⋅-=(3) )5(])31(1[23)(])31(2123[)(5--+⋅-=-n u n u n y n n 1.18 y(n)=1, n =0 y(n)=3*2-n , n ≥11.19 (1) )(])([1)(11n u b a ba n f n n ++--=(2) )2()(2-=-n u a n f n (3)1.22 (3) ae H j 1)(=ω习题二 (离散傅里叶变换及其快速算法)2.11,1,00)12()()2(212-==+=N k k X k X k X2.6 (1) 1 (2) k n NW0 (3) kNNaW a --11 (4) ⎪⎪⎩⎪⎪⎨⎧=-≠-=02)1(01)(k N N k W N k X k N2.10 (1) )()2cos(2n R n NN N π (2) )()2cos(2n R n N N N π- (3) )()2sin(2n R n N N N π2.12 (1)[][])()(21)())(())((21)2cos()(DFT *m k X m k X k R m k N X m k X m n N n x N N N ++-=+-+-=⎥⎦⎤⎢⎣⎡π (2)[][])()(21)())(())((21)2sin()(DFT *m k X m k X jk R m k N X m k X j m n N n x N N N +--=+---=⎥⎦⎤⎢⎣⎡π 2.131,,2,1,0)()(-==N k k X rk Y2.14 1,,1,0)())(()(-==rN k k R k X k Y rN N2.15 (1) )()(n R a n x N n = )()(n R b n y N n =(2) )()(n n x δ= )()(n N n y δ=2.16)(11N R a aN n N-2.17 (1) )2/(N k X + (2) )(k X W kN --2.18 7≤n ≤192.19 (1) }9,12,14,10,6,3,6{)()(~7=n R n f (2) 的主值序列是)(~)(n f n f (3){1,3,6,10,14,12,9,5,0,0,0,0} 2.20 125.8ms, 0.712ms2.27 (1) N=49 (2) M=51 (3) 49-99 2.28 (1)854Hz (2) 815Hz习题三(IIR 滤波器设计)3.11312231122223()2()1()z e e H z ee z e z ---------=-++3.2 (1) ()()111122()11a bj T a bj TH z eze z -+----=+--=221)()(1][1)cos(1---+-----++--ze z e e z bT e aT T bj a T bj a aT (2)01()[](1)!m ms TAT d zH z z m dz z e -=---3.4 12212()3z z H Z z---++=+3.6 1s f K H Z = 100c f HZ =5s f K H Z = 500c f HZ = 200s f HZ = 20c f HZ =3.7 1112110.665()10.36810.7860.368z H z z z z -----+=+--+3.81231231231231231235.196(133)()15.6615.129.12 1.661333.014 2.91 1.7550.31950.331800.99540.99540.331810.96550.58060.106z z z H z z z z z z z z z zz z z z z z ------------------+++=++++++=+++-+-=-+-3.9123123221330.16670.50.50.1667()6210.3333z z z z z z H z z z ---------+--+-==++3.106426425.196(331)()15.6615.129.12 1.66z z z H z z z z -+-=-+-2462462462461333.014 2.91 1.7550.31950.33180.99540.99540.331810.96580.58270.1060z z z z z z z z z z z z -------------+-=-+--+-=-+-3.1212120.0674553(12)()1 1.142980.412802z z H z z z-----+=++ 3.14 55.747.192.7577.3611.828.036.036.028.0)(1234134+-+--+-=-------z z z z z z z z H习题四(FIR 滤波器)4.1 (1))]([sin[)()1()(αωαπ---=n n n h c nd其中,21-=N α (2)因为h(n)偶对称,所以若N 为奇数,则属于第一种线性相滤波器,若N 为偶数,则属于第二种线性相位滤波器(3) )()]12cos(1[21)(n R N nn w N --=π ∴)()()(n h n w n h d =4.2 (1) )()](sin[)](cos[2)(0απαωαω---=n n n n h c d 其中21-=N α,4.3 (1) ])s i n [(])s i n [()(2)(0ωαωαπα---=n n n n h c d4.4 (2) ())()(n h n n h BP BR --=αδ N N 21-=α必须为奇数4.6 用k N k H H -=,又 N 为奇数∴k N N k πθ2)21()(--==)11(N k --π=1514πk - )21(10]2/)/2sin[()2/sin()(1)(Nk N j N k j e N k N k H Ne H πωωπωω+---=∑-=将kj k eH k H θ=)( 带入上式,则∑=+---=140)157(1514]2/)15/2sin[()2/15sin(151)(k k j k j k j eek H e H πωπωπωω=ωπωωπωωωω7])15/2/sin()2/15sin(5.0)15/2/sin()2/15sin(5.0)2/sin()2/15sin([151j e-+--- 140)]1514152cos(1[151)(≤≤-+=n n n h ππ4.7 (1))()()(224821k H e k H ek H k j k jππ--==故 )(~)(~21k H k H =(2) 线性相位, (N-1)/2, h 1(n )好于h 2(n )4.8 ⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=-==-==----k k ek e k ek ek H k j k j k j k j 其它02439.0839.031,...26,257,...1,0)(3231323132313231ππππ 4.9 (1) ⎪⎪⎪⎩⎪⎪⎪⎨⎧====--32,...22;11,..0020,...14,1321,1239.0)(33323332k k ek ek H k j k j ππ(2) ⎪⎪⎪⎩⎪⎪⎪⎨⎧====+-33,...23;11,..0021,...,14,1322,1239.0)(3432)23432(k k e k ek H k j k j πππ4.10 (1)⎪⎪⎩⎪⎪⎨⎧-=-====+--+--2,...3,21,14.000)()21()21(N k eN k k ek k H N N k j N N k j ππππ(2)⎪⎪⎪⎩⎪⎪⎪⎨⎧-+=--===其他11,214.023,14.000N N k N k k H k⎪⎪⎪⎩⎪⎪⎪⎨⎧-+=+----===+--+--其他)21()21(1,21)21(4.023,14.000)(ππππππN N k j N N k j e N N k N N k j e N k e k k H习题五(数字信号处理系统的实现)5.1 (1) 2113.025.0125.02)(---+-+=zz z z H (2) 5432143213221212108.062.098.026.05.112.739.156.3616.076.016.36.065.05.1125.01)(--------------------+-++++=++++⋅--++=z z z z z zz z z z z z z z z z z z H5.7 +--=--11611)[1(161)(z z z H ]414.1141.1185.1198.12211211------+--++--z z z z z z 5.8222222022222()(2())111[2]2/12111nn nn n f een n b e e e ac aac c a ac c∞∞==-=+=++=++=---∑∑σσσσ5.9 (1)21)(cos 21022=+=⎰-θθωπσππd n xbex q q 222222661221⋅===∴σσ(2) b=(80-1.249)/6.02=13.08 (取整)=145.10 (1) 284.2e σ (3) 293.7e σ。