自控及应用第三章习题
自动控制原理第三章课后习题答案

⾃动控制原理第三章课后习题答案3-1 设系统的微分⽅程式如下:(1) )(2)(2.0t r t c =&(2) )()()(24.0)(04.0t r t c t c t c =++&&&试求系统闭环传递函数Φ(s),以及系统的单位脉冲响应g(t)和单位阶跃响应c(t)。
已知全部初始条件为零。
解:(1)因为)(2)(2.0s R s sC =闭环传递函数ss R s C s 10)()()(==Φ单位脉冲响应:s s C /10)(= 010)(≥=t t g单位阶跃响应c(t) 2/10)(s s C = 010)(≥=t t t c(2))()()124.004.0(2s R s C s s =++ 124.004.0)()(2++=s s s R s C 闭环传递函数124.004.01)()()(2++==s s s R s C s φ单位脉冲响应:124.004.01)(2++=s s s C t e t g t 4sin 325)(3-= 单位阶跃响应h(t) 16)3(61]16)3[(25)(22+++-=++=s s s s s s Ct e t e t c t t 4sin 434cos 1)(33----=3-2 温度计的传递函数为11+Ts ,⽤其测量容器内的⽔温,1min 才能显⽰出该温度的98%的数值。
若加热容器使⽔温按10oC/min 的速度匀速上升,问温度计的稳态指⽰误差有多⼤?解法⼀依题意,温度计闭环传递函数11)(+=ΦTs s 由⼀阶系统阶跃响应特性可知:o o T c 98)4(=,因此有 min 14=T ,得出 min 25.0=T 。
视温度计为单位反馈系统,则开环传递函数为Tss s s G 1)(1)()(=Φ-Φ===11v TK ⽤静态误差系数法,当t t r ?=10)( 时,C T Ke ss ?===5.21010。
(完整版)自控原理第三章习题课
解
开环增益应取K≥50。现取K=60。因
故有
,
于是 取 %,计算得
此时
(S)
满足指标要求。最后得所选参数为:
K=60T=0.02(s)
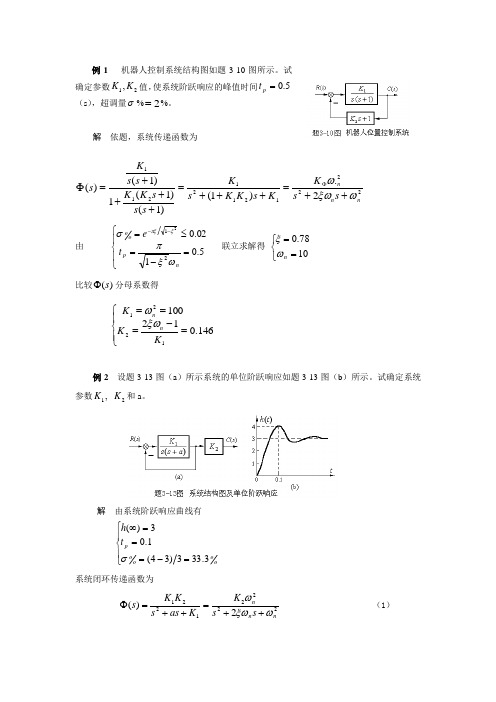
例4控制系统的结构图如图3-37所示。假设输入信号为r(t)=at( 为任意常数)。
闭环特征方程为
易知,在题设条件下,不等式
成立。由劳斯稳定判据,闭环系统稳定,且与待求参数 、 无关。此时,讨论稳态误差是有意义的。而
若
则有
系统的稳态误差为
因此可求出待定参数为
解毕。
为使系统特征根的实部不大于-1,试确定开环增益的取值范围。
解系统开环增益 。特征方程为:
做代换 有:
Routh :S312
S25K-8
S
S0K-8
使系统稳定的开环增益范围为:
例3单位反馈控制系统的开环传递函数为
输入信号为r(t)=A+ωt,A为常量,ω=0.5弧度/秒。试求系统的稳态误差。
解实际系统的输入信号,往往是阶跃函数、斜坡函数和抛物线函数等典型信号的组合。此时,输入信号的一般形式可表示为
证明:通过适当地调节Ki的值,该系统对斜坡输入的响应的稳态误差能达到零。(e=r-c)
解系统的闭环传递函数为
即
因此
当输入信号为r(t)=at时,系统的稳态误差为
要使系统对斜坡输入的响应的稳态误差为零,即ess=0,必须满足
所以
3-24系统结构图如题3-24图所示。已知 ,试分别计算 作用时的稳态误差,并说明积分环节设置位置对减小输入和干扰作用下的稳态误差的影响。
解
自控第三章答案

K
p
不稳定
稳定
0
K
d
不稳定
不稳定
临界阻尼轨迹: D ( s ) s 4 K d s 4 K
2 p
0 出现重根时
p
临界阻尼条件为: 即: K
2 d
4 K
2
2 d
4 4K
0 线。
K p , 以纵轴为对称轴的抛物 K K
2 d 2 d
过阻尼区: 欠阻尼区: K
B3.15 分析图B3.15所示的两个系统,引入与不引入反馈时 系统的稳定性 。
解 不引入反馈 显然不稳定。 引入反馈 D ( s ) s ( s 1 )( s 5 ) 10 ( s 1 ) 0 闭环稳定。 (s ) 10 ( s 1 ) s ( s 1 )( s 5 )
3
赫尔维茨判据: 9 100 D2 20 1 100 9 80 0
1 20 4 100
2
1
0
故系统是稳定的。
(3)s4+4s3+13s2+36s+K=0
解
(1 ) 劳思判据: s s s s s
4
1 4 4 36 K K
13 36 K K
K 0
3
2
1
0
若系统稳定,则
36 K 0 0 K 36 K 0
( 2 )由
G (s )
7(s 1) s ( s 4 )( s 2 s 2 )
2
0 . 875 ( s 1 ) s ( 0 . 25 s 1 )( 0 . 5 s s 1 )
2
可知系统为
1
型的,于是
自动控制原理第3章 习题及解析

自动控制原理(上)习 题3-1 设系统的结构如图3-51所示,试分析参数b 对单位阶跃响应过渡过程的影响。
考察一阶系统未知参数对系统动态响应的影响。
解 由系统的方框图可得系统闭环响应传递函数为/(1)()()111K Ts Ks Kbs T Kb s Ts +Φ==++++ 根据输入信号写出输出函数表达式:111()()()()()11/()K Y s s R s K s T Kb s s s T bK =Φ⋅=⋅=-++++对上式进行拉式反变换有1()(1)t T bKy t K e-+=-当0b >时,系统响应速度变慢;当/0T K b -<<时,系统响应速度变快。
3-2 设用11Ts +描述温度计特性。
现用温度计测量盛在容器内的水温,发现1min 可指示96%的实际水温值。
如果容器水温以0.1/min C ︒的速度呈线性变化,试计算温度计的稳态指示误差。
考察一阶系统的稳态性能分析(I 型系统的,斜坡响应稳态误差)解 由开环传递函数推导出闭环传递函数,进一步得到时间响应函数为:()1t T r y t T e -⎛⎫=- ⎪⎝⎭其中r T 为假设的实际水温,由题意得到:600.961Te-=-推出18.64T =,此时求输入为()0.1r t t =⋅时的稳态误差。
由一阶系统时间响应分析可知,单位斜坡响应的稳态误差为T ,所以稳态指示误差为:lim ()0.1 1.864t e t T →∞==3-3 已知一阶系统的传递函数()10/(0.21)G s s =+今欲采用图3-52所示负反馈的办法将过渡过程时间s t 减小为原来的1/10,并保证总的放大倍数不变,试选择H K 和0K 的值。
解 一阶系统的调节时间s t 与时间常数成正比,则根据要求可知总的传递函数为10()(0.2/101)s s Φ=+由图可知系统的闭环传递函数为000(10()()1()0.211010110()0.21110H HHHK G s K Y s R s K G s s K K K s s K ==++++==Φ++)比较系数有101011011010HHK K K ⎧=⎪+⎨⎪+=⎩ 解得00.9,10H K K ==3-4 已知二阶系统的单位阶跃响应为1.5()1012sin(1.6+53.1t y t e t -=-)试求系统的超调量%σ,峰值时间p t ,上升时间r t 和调节时间s t 。
自动控制原理第三章答案

p
0.1
1.1 1.0 100% 10% 1.1 根据二阶欠阻尼系统指标计算公式
p
p
e
2
1 2
0.1 ln
2 2
p
2
1
2
ln 0.1 2.3 (2.3 )
2
1
2.3 0.59
t
h(t) 1
1 2
4 e 3
t
1 e 3
4t
T 1,T 0.25 ts 3T 3s(T 4T )
1 1 2
ts 3T 1 , (T 1 4T2 )
6
不是舍去T2 , 是相应项衰减快
3-7 某单位反馈系统阶跃响应如题3-7所示, 试确定其开环传递函数
解:由可知图,系统具有二阶欠阻尼系统 特征,且
带入原系统特征方程,得到一个以s1为变量的新特征方程,对新特征 方程应用劳斯稳定判据,可以判定是否全部位于s=-1垂线之左。
3-15 设控制系统如题3-15图所示,要求闭环特征
根全部位于s=-1之左,试确定参数K的取值范围。
10K 0 10 10K 0 1 10K H (s) K 0 0.2s 1 10KH 0.2 0.2s 1 10K H 1 s 1 0.2s 1 1 10K H
10
G(s)
10 0.2s 1
据题意
10K 10 (放大倍数不变) 1 10K
0 H
方法1 根据定义
1 Y(s) L[y(t )] s X(s) L(x(t )] 1 1 s 1 s 2 (s 1)(s 2) s(s 2) s(s 1) 1 (s 1)(s 2)
自控第三章作业答案

P3.4 The open-loop transfer function of a unity negative feedback system is)1(1)(+=s s s GDetermine the rise time, peak time, percent overshoot and setting time (using a 5% setting criterion).Solution: Writing he closed-loop transfer function 2222211)(nn ns s s s s ωςωωΦ++=++=we get 1=n ω, 5.0=ς. Since this is an underdamped second-order system with 5.0=ς, thesystem performance can be estimated as follows.Rising time.sec 42.25.0115.0arccos 1arccos 22≈-⋅-=--=πςωςπn r tPeak time.sec 62.35.011122≈-⋅=-=πςωπn p tPercent overshoot %3.16% 100% 100225.015.01≈⨯=⨯=--πςπςσee pSetting time.sec 615.033=⨯=≈ns t ςω(using a 5% setting criterion)P3.5 A second-order system gives a unit step response shown in Fig. P3.5. Find the open-loop transfer function if the system is a unit negative-feedback system.Solution: By inspection we have %30% 100113.1=⨯-=pσSolving the formula for calculating the overshoot,3.021==-ςπςσep, we have362.0ln ln 22≈+-=pp σπσςSince .sec 1=p t , solving the formula for calculating the peak time, 21ςωπ-=n p t , we gets e c / 7.33rad n =ωHence, the open-loop transfer function is )4.24(7.1135)2()(2+=+=s s s s s G n nςωωP3.6 A feedback system is shown in Fig. P3.6(a), and its unit step response curve is shown in Fig. P3.6(b). Determine the values of 1k , 2k , and a ..1.1Figure P3.5Solution: The transfer function between the input and output is given by2221)()(k as sk k s R s C ++=The system is stable and we have, from the response curve,21lim )(lim 122210==⋅++⋅=→∞→k sk as sk k s t c s tBy inspection we have %9% 10000.211.218.2=⨯-=pσSolving the formula for calculating the overshoot, 09.021==-ςπςσep, we have608.0ln ln 22≈+-=pp σπσςSince .sec 8.0=p t , solving the formula for calculating the peak time,21ςωπ-=n p t , we gets e c / 95.4rad n =ωThen, comparing the characteristic polynomial of the system with its standard form, we have22222n n s s k as s ωςω++=++5.2495.4222===n k ω02.695.4608.022=⨯⨯==n a ςωP3.8 For the servomechanism system shown in Fig. P3.8, determine the values of k and a that satisfy the following closed-loop system design requirements. (a) Maximum of 40% overshoot. (b) Peak time of 4s.Solution: For the closed-loop transfer function we have 22222)(nn ns sks k sk s ωςωωαΦ++=++=hence, by inspection, we getk n=2ω, αςωk n =2, and nnkωςςωα22==Taking consideration of %40% 10021=⨯=-ςπςσepresults in280.0=ς.In this case, to satisfy the requirement of peak time, 412=-=ςωπn p t , we have.s e c / 818.0r a d n =ω.2.2(a)(b)Figure P3.6Figure P3.8Hence, the values ofkandaare determined as67.02==n k ω, 68.02==nωςαP3.10 A control system is represented by the transfer function)13.04.0)(56.2(33.0)()(2+++=s ss s R s CEstimate the peak time, percent overshoot, and setting time (%5=∆), using the dominant polemethod, if it is possible.Solution: Rewriting the transfer function as]3.0)2.0)[(56.2(33.0)()(22+++=s s s R s Cwe get the poles of the system: 3.02.02 1j s ±-=,, 56.23-=s . Then, 2 1,s can be considered as a pair of dominant poles, because )Re()Re(32 1s s <<,.Method 1. After reducing to a second-order system, the transfer function becomes13.04.013.0)()(2++=s ss R s C (Note:1)()(lim==→s R s C k s Φ)which results in sec / 36.0rad n =ω and 55.0=ς. The specifications can be determined ass e c 0.42112ςωπ-=n p t , %6.12% 10021=⨯=-ςπςσeps e c 67.2011ln 12=⎪⎪⎪⎭⎫⎝⎛-=ς∆ςωns t Method 2. Taking consideration of the effect of non-dominant pole on the transient components cause by the dominant poles, we haves e c 0.8411)(231=--∠-=ςωπn p s s t%6.13% 10021313=⨯-=-ςπςσes s s ps e c 6.232ln 1313=⎪⎪⎭⎫⎝⎛-⋅=ss s t ns ∆ςωP3.13 The characteristic equations for certain systems are given below. In each case, determine the value of k so that the corresponding system is stable. It is assumed that k is positive number.(a) 02102234=++++k s s s s (b) 0504)5.0(23=++++ks s k sSolution: (a) 02102234=++++k s s s s .The system is stable if and only if⎪⎪⎩⎪⎪⎨⎧<⇒>=>9 022010102203k k D ki.e. the system is stable when 90<<k .(b) 0504)5.0(23=++++ks s k s . The system is stable if and only if⎪⎩⎪⎨⎧>-+⇒>-+⇒>+=>>+0)3.3)(8.34( 05024 041505.00 ,05.022k k k k k k D k ki.e. the system is stable when 3.3>k .P3.14 The open-loop transfer function of a negative feedback system is given by)12.001.0()(2++=s ss Ks G ςDetermine the range of K and ς in which the closed-loop system is stable. Solution: The characteristic equation is02.001.023=+++K s s s ς The system is stable if and only if⎪⎩⎪⎨⎧<⇒>-⇒>=>>ςςς20 001020 0101.02.002.0 ,02K K .ς.K D kThe required range is20>>K ς.P3.17 A unity negative feedback system has an open-loop transfer function )16)(13()(++=s s s K s GDetermine the range ofkrequired so that there are no closed-loop poles to the right of the line1-=s . Solution: The closed-loop characteristic equation is18)6)(3( 0)16)(13(=+++⇒=+++K s s s K s s si.e. 01818923=+++K s s sLetting 1~-=s s resulting in 0)1018(~3~6~ 018)5~)(2~)(1~(23=-+++⇒=+++-K s s s K s s sUsing Lienard-Chipart criterion, all closed-loop poles locate in the right-half s~-plane, i.e. to theright of the line 1-=s , if and only if⎪⎩⎪⎨⎧<⇒>-⇒>-=>⇒>-14 08.182 0311018695 ,010182K K K D K KThe required range is 91495 <<K , or56.10.56 <<KP3.18 A system has the characteristic equation0291023=+++k s s sDetermine the value of k so that the real part of complex roots is 2-, using the algebraic criterion.Solution: Substituting 2~-=s s into the characteristic equation yields 02~292~102~ 23=+-+-+-k s s s )()()( 0)26(~~4~ 23=-+++k s s sThe Routh array is established as shown.If there is a pair of complex roots with real part of 2-, then026=-ki.e. 30=k . In the case of 30=k , we have the solution of the auxiliary equation j s ±=~, i.e. j s ±-=2.3s 1 12s 4 26-k1s 0sP3.22 The open-loop transfer function of a unity negative feedback system is given by)1)(1()(21++=s T s T s Ks GDetermine the values of K , 1T , and 2T so that the steady-state error for the input, bt a t r +=)(, is less than 0ε. It is assumed that K , 1T , and 2T are positive, a and b are constants. Solution: The characteristic polynomial is K s s T T s T T s ++++=221321)()(∆Using L-C criterion, the system is stable if and only if2121212121212 0 01T T T T K T KT T T T T K T T D +<⇒>-+⇒>+=Considering that this is a 1-type system with a open-loop gain K , in the case of 2121T T T T K +<,we have 00.. εεεεεbK Kb v ss r ss ss>⇒<=+=Hence, the required range for K is21210T T T T K b+<<εP3.24 The block diagram of a control system is shown in Fig. P3.24, where )()()(s C s R s E -=. Select the values of τ and b so that the steady-state error for a ramp input is zero.Solution: Assuming that all parameters are positive, the system must be stable. Then, the error response is)()1)(1()(1)()()(21s R K s T s T b s K s C s R s E ⎥⎦⎤⎢⎣⎡++++-=-=τ)()1)(1()1()(2121221s R Ks T s T Kb s K T T sT T ⋅+++-+-++=τLetting the steady-state error for a ramp input to be zero, we get 221212210.)1)(1()1()(lim )(lim sv K s T s T Kb s K T T sT T s s sE s s r ss ⋅+++-+-++⋅==→→τεwhich results in ⎩⎨⎧=-+=-0121τK T T Kb I.e. KT T 21+=τ,Kb 1=.P3.26 The block diagram of a system is shown in Fig. P3.26. In each case, determine the steady-state error for a unit step disturbance and a unit ramp disturbance, respectively. (a) 11)(K s G =,)1()(222+=s T s K s GFigure P3.24Figure P3.26(b)ss T K s G )1()(111+=,)1()(222+=s T s K s G , 21T T >Solution: (a) In this case the system is of second-order and must be stable. The transfer function from disturbance to error is given by 212212.)1(1)(K K Ts s K G G G s d e ++-=+-=ΦThe corresponding steady-state errors are 1212.11)1(lim K s K K Ts s K s s p ss -=⋅++-⋅=→ε∞→⋅++-⋅=→2212.1)1(lim sK K Ts s K s s ass ε(b) Now, the transfer function from disturbance to error is given by )1()1()(121222.+++-=s T K K s T s sK s d e Φand the characteristic polynomial is21121232)(K K s T K K s s T s +++=∆ Using L-C criterion,0)(121211212212>-==T T K K T K K T K K Dthe system is stable. The corresponding steady-state errors are 01)1()1(lim 1212220.=⋅+++-⋅=→ss T K K s T s sK s s p ss ε121212220.11)1()1(lim K ss T K K s T s sK s s a ss -=⋅+++-⋅=→ε。
自控原理第三章练习题1
1、适合于应用传递函数描述的系统是 C A .非线性定常系统; B .线性时变系统; C .线性定常系统; D .非线性时变系统。
2、某0型单位反馈系统的开环增益为K ,则在221)(t t r =输入下,系统的稳态误差为∞ 3、动态系统 0 初始条件是指 t<0 时系统的 BA .输入为 0 ;B .输入、输出以及它们的各阶导数为 0;C .输入、输出为 0;D .输出及其各阶导数为 0。
4、若二阶系统处于无阻尼状态,则系统的阻尼比ξ应为 D A .0<ξ<1; B .ξ=1;C .ξ>1; D .ξ=0。
5、在典型二阶系统传递函数2222)(n n ns s s ωξωω++=Φ中,再串入一个闭环零点,则 A A .超调量增大;B .对系统动态性能没有影响;C .峰值时间增大;D .调节时间增大。
6、讨论系统的动态性能时,通常选用的典型输入信号为 A A .单位阶跃函数 ; B .单位速度函数 ; C .单位脉冲函数 ; D .单位加速度函数。
7、某 I 型单位反馈系统,其开环增益为K,则在tt r 21)(=输入下,系统的稳态误差为 1/2K 8、典型欠阻尼二阶系统的超调量 00005>σ,则其阻尼比的范围为707.00<<ξ9、二阶系统的闭环增益加大 DA.快速性越好; B.超调量越大;C.峰值时间提前; D.对动态性能无影响。
10、欠阻尼二阶系统的n ωξ,,都与P t 有关11、典型欠阻尼二阶系统若n ω不变,ξ 变化时,当707.0>ξ时,↓→↑s t ξ12、稳态速度误差的正确含义为(A 为常值):t A t r ⋅=)(时,输出位置与输入位置之间的稳态误差;13、某系统单位斜坡输入时∞=ss e ,说明该系统 AA .是0型系统;B .闭环不稳定;C .闭环传递函数中至少有一个纯积分环节D .开环一定不稳定。
14、若单位反馈系统的开环传递函数为4532)(2++=s s s G ,则其开环增益K ,阻尼比ξ和无阻尼自然频率n ω分别为:32,435,211、增加系统阻尼比,减小超调量的有效措施有 B C EA .增大闭环增益;B .引入输出的速度反馈;C .减小开环增益;D .增大开环增益;E .引入误差的比例-微分进行控制。
自控原理第三章练习题1
⾃控原理第三章练习题11、适合于应⽤传递函数描述的系统是 C A .⾮线性定常系统; B .线性时变系统; C .线性定常系统; D .⾮线性时变系统。
2、某0型单位反馈系统的开环增益为K ,则在221)(t t r =输⼊下,系统的稳态误差为∞ 3、动态系统 0 初始条件是指 t<0 时系统的 BA .输⼊为 0 ;B .输⼊、输出以及它们的各阶导数为 0;C .输⼊、输出为 0;D .输出及其各阶导数为 0。
4、若⼆阶系统处于⽆阻尼状态,则系统的阻尼⽐ξ应为 D A .0<ξ<1; B .ξ=1;C .ξ>1; D .ξ=0。
5、在典型⼆阶系统传递函数 2222)(n n ns s s ωξωω++=Φ中,再串⼊⼀个闭环零点,则 AA .超调量增⼤;B .对系统动态性能没有影响;C .峰值时间增⼤;D .调节时间增⼤。
6、讨论系统的动态性能时,通常选⽤的典型输⼊信号为 A A .单位阶跃函数; B .单位速度函数; C .单位脉冲函数; D .单位加速度函数。
7、某 I 型单位反馈系统,其开环增益为K,则在tt r 21)(=输⼊下,系统的稳态误差为 1/2K 8、典型⽋阻尼⼆阶系统的超调量 00005>σ,则其阻尼⽐的范围为707.00<<ξ9、⼆阶系统的闭环增益加⼤ DA.快速性越好;B.超调量越⼤;C.峰值时间提前;D.对动态性能⽆影响。
10、⽋阻尼⼆阶系统的n ωξ,,都与P t 有关11、典型⽋阻尼⼆阶系统若nω不变,ξ变化时,当707.0>ξ时,↓→↑s t ξ12、稳态速度误差的正确含义为(A 为常值):t A t r ?=)(时,输出位置与输⼊位置之间的稳态误差;13、某系统单位斜坡输⼊时∞=ss e ,说明该系统 AA .是0型系统;B .闭环不稳定;C .闭环传递函数中⾄少有⼀个纯积分环节D .开环⼀定不稳定。
14、若单位反馈系统的开环传递函数为4532)(2++=s s s G ,则其开环增益K ,阻尼⽐ξ和⽆阻尼⾃然频率n ω分别为:32,435,211、增加系统阻尼⽐,减⼩超调量的有效措施有 B C EA .增⼤闭环增益;B .引⼊输出的速度反馈;C .减⼩开环增益;D .增⼤开环增益;E .引⼊误差的⽐例-微分进⾏控制。
自动控制原理第三章课后习题 答案(最新)
3-1 设系统的微分方程式如下:(1) )(2)(2.0t r t c =&(2) )()()(24.0)(04.0t r t c t c t c =++&&&试求系统闭环传递函数Φ(s),以及系统的单位脉冲响应g(t)和单位阶跃响应c(t)。
已知全部初始条件为零。
解:(1) 因为)(2)(2.0s R s sC = 闭环传递函数ss R s C s 10)()()(==Φ 单位脉冲响应:s s C /10)(= 010)(≥=t t g单位阶跃响应c(t) 2/10)(s s C = 010)(≥=t t t c(2))()()124.004.0(2s R s C s s =++ 124.004.0)()(2++=s s s R s C 闭环传递函数124.004.01)()()(2++==s s s R s C s φ 单位脉冲响应:124.004.01)(2++=s s s C t e t g t 4sin 325)(3-= 单位阶跃响应h(t) 16)3(61]16)3[(25)(22+++-=++=s s s s s s Ct e t e t c t t 4sin 434cos 1)(33----=3-2 温度计的传递函数为11+Ts ,用其测量容器内的水温,1min 才能显示出该温度的98%的数值。
若加热容器使水温按10ºC/min 的速度匀速上升,问温度计的稳态指示误差有多大?解法一 依题意,温度计闭环传递函数11)(+=ΦTs s 由一阶系统阶跃响应特性可知:o o T c 98)4(=,因此有 min 14=T ,得出 min 25.0=T 。
视温度计为单位反馈系统,则开环传递函数为Tss s s G 1)(1)()(=Φ-Φ=⎩⎨⎧==11v TK 用静态误差系数法,当t t r ⋅=10)( 时,C T Ke ss ︒===5.21010。
第三章 自控课后答案
第三章 线性系统的时域分析与校正习题及答案3-1 已知系统脉冲响应t e t k 25.10125.0)(-=试求系统闭环传递函数)(s Φ。
解Φ()()./(.)s L k t s ==+001251253-2 设某高阶系统可用下列一阶微分方程T c t c t r t r t ∙∙+=+()()()()τ近似描述,其中,1)(0<-<τT 。
试证系统的动态性能指标为T T T t d ⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-+=τln 693.0t T r=22.TT T t s ⎥⎦⎤⎢⎣⎡-+=)ln(3τ解 设单位阶跃输入ss R 1)(=当初始条件为0时有:11)()(++=Ts s s R s C τ11111)(+--=⋅++=∴Ts T s sTs s s C ττC t h t T Te t T()()/==---1τ1) 当t t d = 时h t T Te t td ()./==---051τ12=--T T e t T d τ/ ; Tt T T d -⎪⎭⎫ ⎝⎛-=-τln 2ln⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-+=∴T T T t d τln 2ln2) 求tr (即)(t c 从1.0到9.0所需时间)当 Tt eTT t h /219.0)(---==τ; t T T T 201=--[ln()ln .]τ 当 Tt eTT t h /111.0)(---==τ; t T T T 109=--[ln()ln .]τ 则 t t t T T r =-==21090122ln ... 3) 求 t sTt s s eTT t h /195.0)(---==τ ]ln 3[]20ln [ln ]05.0ln [lnTT T T T T T T T t s τττ-+=+-=--=∴3-3 一阶系统结构图如图3-45所示。
要求系统闭环增益2=ΦK ,调节时间4.0≤s t s ,试确定参数21,K K 的值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
τ s
s3 1 10 s2 (1+10 ) 10 τ b31 s1 s0 10 τ >0
第三章习题课 (3-14)
3-14 已知系统结构如图,试确定系统稳 定时τ值范围。
R(s)
解: 10( s+1) τ G(s)= s2(s+1) s3 s2 s1 s0 1 1 b31 10 τ 10 10
第三章习题课 (3-1)
3-1 设温度计需要在一分钟内指示出响应值 的98%,并且假设温度计为一阶系统,求时 间常数T。如果将温度计放在澡盆内,澡盆 的温度以10oC/min的速度线性变化,求温度 计的误差。 解: c(t)=c(∞)98% t=4T=1 min T=0.25 -t/T c(t)=10(t-T+e ) r(t)=10t e(t)=r(t)-c(t) =10(T- e-t/T) ess=lim e(t) =10T=2.5 t→∞
R(s)
-
-
C(s) K s(0.5s+1) τ s
第三章习题课 (3-11)
3-11 已知闭环系统的特征方程式,试用 劳斯判据判断系统的稳定性。 (3) s4+8s3+18s2+16s+5=0 解: 劳斯表如下: (1) s3+20s2+9s+100=0 s4 1 18 5 劳斯表如下: s3 8 16 s3 1 9 s2 16 5 s2 20 100 1 216 s 16 s1 4 s0 100 系统稳定。 s0 5 系统稳定。
R(s)= s1 3
第三章习题课 (3-18)
3-18 已知系统结构如图。为使ζ=0.7时 单位斜坡输入的稳态误差ess=0.25 确定 K 和 τ值 。 R(s) K C(s) - s(s+2) K 解: G(s)= s2+2s+K s τ K Φ(s)= s2+(2+K )s+K τ τ ess= 2+K =0.25 τ ζ 2 ω n=2+K =2*0.7 K K ω n2 =K τ = 0.25K-2 K =31.6 τ =0.186 K K 2+K τ = 1 s+1) s(2+K τ
第三章习题课 (3-16)
10 200 (2) G(s)= s(s+2)(s+10) = s(0.5s+1)(0.1s+1)
ess1=0 2 υ=1 ess2= K ess=∞ Kυ=10 ess3=∞ Ka=0 (2s+1) 10(2s+1) = (3) G(s)= s2(s2+4s+10) s2(0.1s2+0.4s+1) ess1=0 Kp=∞ υ=2 ess2=0 K =∞ ess=2 υ Ka=1
第三章习题课 (3-19)
-[1+F(s)] = 1+G(0)F(0)
(3) 求d1(t)作用下的稳态误差. 1 K F(s)= Js G(s)=Kp + s -F(s) 1 essd= lim s1+G(s)F(s) s s→0 - 1 1 =0 Js = lim s K) 1 s s→0 1+(Kp+ s Js
ζ 2 ω n=6 ω n2 = 25
ω n=5 ζ=0.6
第三章习题课 (3-6)
3-6 已知系统的单位阶跃响应: -60t -10t c(t)=1+0.2e -1.2e (1) 求系统的闭环传递函数。 (2) 求系统的阻尼比和无阻尼振荡频率。 1 + 0.2 - 1.2 = 600 解: C(s)= s s+60 s+10 s(s+60)(s+10) 1 C(s)= 600 R(s)= s 2+70s+600 R(s) s ω n=24.5 ζ 2 ω n=70 ω n2 =600 ζ=1.43
第三章习题课 (3-4)
3-4 已知单位负反馈系统的开环传递函 数,求系统的上升时间tr、峰值时间tp、 超调量σ% 和调整时间ts。 1 G(s)= s(s+1) C(s) 1 解: R(s) = s2+s+1 ω d =ω n 1- 2 =0.866 ζ ζ 2 ω n=1 ω n=1 -1 1- 2 β =tg ζ =60o 2= 1 ωn ζ=0.5 ζ 3.14 π tr=π -β = 3.14-3.14/3=2.42 tp=ω d = 0.866 =3.63 ωd 0.866 ζ - π 1- 2 4 ζ 3 100%=16% ts=ζ ω =6 ts=ζ ω =8 e σ%= n n
第三章习题课 (3-8)
3-8 已知单位负反馈系统的开环传递函 数,求系统K、T值以满足动态指标: K σ%≤30%,ts≤0.3(5%)。 G(s)= s(Ts+1) K C(s) K 解: R(s) = Ts2+s+K = 2 1T K s + T s+ T 3 ts=ζ ω n ≤0.3 2 ω n= 1 ζ ω n≥10 T≤0.05 ζ T e
第三章习题课 (3-12)
3-12 已知单位负反馈系统的开环传递函数, (1)试确定系统稳定时K值范围,(2)确定使闭环 极点实部不大于-1的K值范围。 K G(s)= s(s+4)(s+10)
解: s4 s3 s2 s1 s4+3s3+4s2+2s+Ks+2K=0 1 4 2K b31= 10-2K 3 3 2+K K2+10K-20 b41= 10-K b31 2K (K-1.7)(K+11.7)>0 b41 K<10
第三章习题课 (3-16)
3-16 已知单位反馈系统的开环传递函数, 试求K p、 Kv和Ka .并求稳态误差ess. 1+ 2+ 2 2 R(s)= s r(t)=I(t)+2t+t s2 s3 20 解: (1) G(s)=(0.1s+1)(0.2s+) R0 1 ess1=1+K =21 Kp=20 υ=0 ess2=∞ K =0 υ ess3=∞ Ka=0 ess=∞
第三章习题课 (3-17)
1 r(t)=I(t), t , 2 t2 (2) 求系统的稳态误差: 1 K1 τ G(s)= s2+K s = 1 解: τ 1 s( Kτ s+1)
1
1 R(s)= s υ=1
R(s)= s1 2
Kp=∞ K =K υ Ka=0
ess1=0 ess2= =0.24 τ ess3=∞
ζ -π 1ζ
2
≤0.3
ζ≥0.35
ω n≥28.6 K≥40.9
K ω n2 = T =817.96
第三章习题课 (3-9)
3-9 已知系统的结构和受到F=10N作用时的 响应曲线如图,确定系统的参数试K、m,f值。
0.08 0.06
0
c(t)
F
3
k m
t
f
y(t)Biblioteka 第三章习题课 (3-10)
3-10 已知系统结构,求系统K、τ值以满足动 态指标:σ%=30%,ts=0.5(5%)。
τ s
第三章习题课 (3-19)
3-19 系统如图 r(t)=I(t) d1(t)=d2(t)=I(t)
D1(s) R(s) E(s)
D2(s)
-
G(s)
+
F(s)
+
C(s)
(1) 求r(t)作下的稳态误差. 1 1 s 解: = 1+G(0)F(0) essr=lim s· s→0 1+G(s)F(s) (2) 求d1(t)和d2(t)同时作用下的稳态误差. -G2(s)H(s) D(s) Ed(s)= 1+G (s)G (s)H(s)· 1 2 1 -1 essd= lim s [ -F(s) +1+G(s)F(s) ] s s→0 1+G(s)F(s)
第三章习题课 (3-13)
3-13 已知系统结构如图,试确定系统稳 定时τ值范围。 R(s) 10 C(s) 1 解: 10(1+ 1 ) s G(s)=s2+s+10 s τ 10(s+1) =s(s2+s+10 s) τ 10(s+1) Φ(s)= s3 +s2+10 s2+10s+10 τ 10(1+10 )-10 τ b31= 1+10 >0 τ
ess3=2
Kp=∞
第三章习题课 (3-17)
3-17 已知系统结构如图。 1 C(s) (1) 单位阶跃输入: R(s) K1 s2 - σ%=20% ts =1.8(5%) τ s 确定K1 和τ值 。 K1 K1 解: G(s)= 2 Φ(s)= s2+Kτ s+K s +Kτ s 1 1 1 ζ - π 1- 2 ζ ζ ω n=Kτ 2 =0.2 e 1 3 =1.8 ζ=0.45 2 =K ωn ts=ζ ω n 1 3 =3.7 K =ω 2 ω n= n =13.7 τ =0.24 1 1.8*0.45
第三章习题课 (3-2)
(2) 求系统的单位脉冲响应,单位斜坡 响应,及单位抛物响应在t1时刻的值. K e-t/T =4 解: t1=0.8 R(s)=1 g(t)= T 1 R(s)= s2 uc(t)=K(t-T+Te-t/T)=4 1 1 Uc(s)=Ts K 1 s3 R(s)= s3 + 1 - T + T2 - T2 ) =K( s3 s2 s s+1/T 1 uc(t)=10( 2 t2 -0.5t+0.25-0.25e-2t)=1.2