机械原理作业答案 叶仲和 蓝兆辉版
机械原理 课后习题答案
⎛ ⎜ ⎝
m / s2 mm
⎞ ⎟ ⎠
作加速度图
C
2
3
D
B
p(d) 4
(c3)
b2 (b1) (b3)
题3-8 c) 解(续2)
[解]
(3)加速度分析 aB 2 (= aB1) → aB3 → aC 3
1) 求aB2
A 1 ω1
2) 求aB3
aB3
=
an B3D
+
at B3D
=
aB
2
+
ak B3B2
得d点
p(c3)
E
vD = μv pd = 0.005 × 44.6 = 0.223 (m / s)
作 de ⊥ bc2
并使
de = DE = lDE = 40 bd BD lBD 50
得e点
vE = μv pe = 0.005 × 32.0 = 0.16 (m / s)
3) 求ω2
ω2
=
vC 2B lBC
p' = 2p'l + p'h − 3n' = 2 × 3 + 0 − 3× 2 = 0
p' = 2p'l + p'h − 3n' = 2 ×10 + 0 − 3×6 = 2
F = 3n − (2pl + ph − p') − F' = 3 × 11 − (2 × 17 + 0 − 2) − 0 =1
P24
B P23
3
2A
P12
1
4
D
P14
vE
=
vB
P13 E P13B
机械原理作业答案 叶仲和 蓝兆辉版
C2
1
B1
4
B
(c) Find the crank angle
VC C1 B2 F C
α 2 γ
3
ψmax
D
C2
θ
A
1
B1
4
B
(d) Find max and min.
C3
α max γ min
4
A B3
B4
D
4
Two dead-points if link DC is the driver.
D
机构的第一个位置
C1 B1 A2 '
C2
A
B2
D
截取B2C2=B1C1 ,得B2点。
C1 B1 A2 '
C2
A
B2
D
检验运动未知构件AB的杆长:AB1=AB2。
C1 B1 A2 '
C2
A
B2
D
Ex.4-9 In an offset slider-crank mechanism ABC, when the crank AB is located at position AB1, the slider reaches its left limit position.
B A
e
The maximum pressure angle MAX=30 occurs when the crank AB is perpendicular to the slide way.
B3 B
30°
A
e
C3
Find the stroke H of the slider and the crank angle between the two limiting positions.
机械原理习题及答案(1-1至4-3)
2-1 试求出下列图示机构中的全部瞬心。
2-2 图示铰链四杆机构中,已知:
l BC = 50 mm, lCD = 35 mm, l AD = 30 mm,AD为机架。
1. 2. 3.
若若若此此此机机机构构构为为为曲双双柄曲摇摇柄杆杆机机机构构,构,,求求且llAAABBB的为的最曲数小柄值值,范;求围l。AB
3-1 5-9 渐开线主动齿轮I逆时针转动,已知两轮的齿顶
圆 ra ,齿根圆 r f ,基圆 rb 以及中心距如图所
示。试在图上画出:
1)理论啮合线N1N2 ;
2)啮合开始点 B 2 及啮合
终止点 B 1 ,标出实
际啮合线;
' 3)啮合角 ,一对节圆,
注出其半径 r1 及 r2 ,
4)徒手画出在节点P啮合的一对 齿的齿廓工作段(用双线表示)。
2-3
1-4b (答案)
(答案a)(答案b)
1-4c (答案)
(答案c)(答案d)
(答案e)(答案f)
2-4 (答案a)(答案b)
3-1 (答案) 3-2(答案a)(答案b) 3-3 (答案)
2-5 (答案) 2-6答案 2-7答案
3-4 (答案)
(答案) (答案) (答案)
1-1 试画出下列各机构的运动简图, 并分别计算其自由度。
1-2b
解: 依次拆下6-7,4-5,2-3 三个II级组,故为II级机构。 C为复合铰链。
n 7 ,p L 1,0 p H 0 ,
F 3 7 2 1 1 0 .
1-3 图示椭圆画器机构, 已知AB=BC=BD, 试证滑块4对连杆CD的约 束是虚约束, 去掉构件4之后计算此机构的自由度。
机械原理作业答案 叶仲和 蓝兆辉版

Name
Class Student No.
Date
2-1 Draw the kinematic diagrams of the mechanisms shown in Fig2-1.
4
scale 3:1
1B A 23
C
B 2
1 A
3
C 4
Fig2-1(a)
1
4
AB
2
3
C
Fig2-1(b)
1B A
42
(a) When link 1 is regarded as the driver.
(b) When link 5 is regarded as the driver.
Note: During structural analysis, list the assembly order of Assur groups, the
Name
Class Student No.
Date
∞P14
E (P13)
G (P23)
2
D
3
A
C (P )
V1 B
1 F(P12 )
Fig3-1(e)
21 4 P12 P24 P14 12 3 P12 P13 P23
23 4
C (P23)
P13
P23 P24 P34
2
14 3 A
( P14)
P14 P13 P43
Class Student No.
Date
2-10 The schematic diagram of a mechanism designed by someone is shown in
Fig2-10. This mechanism should be able to transform a continuous rotation of link1
机械原理课后答案2
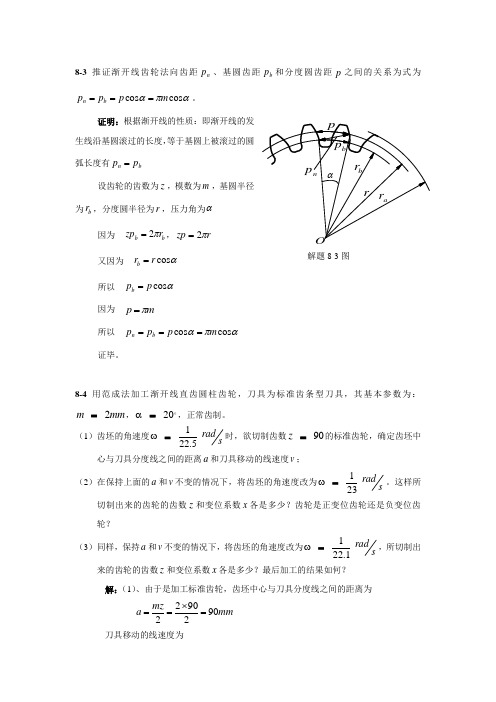
8-3 推证渐开线齿轮法向齿距n p 、基圆齿距b p 和分度圆齿距p 之间的关系为式为απαcos cos m p p p b n ===。
证明:根据渐开线的性质:即渐开线的发生线沿基圆滚过的长度,等于基圆上被滚过的圆弧长度有b n p p =设齿轮的齿数为z ,模数为m ,基圆半径为b r ,分度圆半径为r ,压力角为α因为 b b r zp π2=,r zp π2= 又因为 αcos r r b = 所以 αcos p p b = 因为 m p π=所以 απαcos cos m p p p b n === 证毕。
8-4 用范成法加工渐开线直齿圆柱齿轮,刀具为标准齿条型刀具,其基本参数为:mm m 2=, 20=α,正常齿制。
(1)齿坯的角速度s rad5.221=ω时,欲切制齿数90=z 的标准齿轮,确定齿坯中心与刀具分度线之间的距离a 和刀具移动的线速度v ; (2)在保持上面的a 和v 不变的情况下,将齿坯的角速度改为s rad231=ω。
这样所切制出来的齿轮的齿数z 和变位系数x 各是多少?齿轮是正变位齿轮还是负变位齿轮?(3)同样,保持a 和v 不变的情况下,将齿坯的角速度改为s rad1.221=ω,所切制出来的齿轮的齿数z 和变位系数x 各是多少?最后加工的结果如何? 解:(1)、由于是加工标准齿轮,齿坯中心与刀具分度线之间的距离为mm mz a 9029022=⨯==刀具移动的线速度为O解题8-3图s mm mz v 45.22129022=⋅⨯=⋅=ω (2)、齿轮的齿数z 为922312422=⨯⨯==ωm v z变位系数x 为122922902-=⨯-=-=m mz a x 因为变位系数小于零,所以齿轮是负变位齿轮。
(3)、齿轮的齿数z 为4.881.2212422=⨯⨯==ωm v z 变位系数x 为8.0224.882902=⨯-=-=m mz a x 因为变位系数为正,所以齿轮是正变位齿轮。
机械原理习题及答案修订版
机械原理习题及答案修订版IBMT standardization office【IBMT5AB-IBMT08-IBMT2C-ZZT18】第二章 平面机构的结构分析2-1 绘制图示机构的运动简图。
2-3 计算图示机构的自由度,并指出复合铰链、局部自由度和虚约束。
解:(a) C 处为复合铰链。
7,n =p h =0,p l =10。
自由度 323721001W l h F n p p =--=⨯-⨯-=。
(b) B 处为局部自由度,应消除。
3n =, p h =2,p l =2自由度 323323121W l h F n p p =--=⨯-⨯-⨯=。
(c) B 、D 处为局部自由度,应消除。
3n =, p h =2,p l =2。
自由度 323323121W l h F n p p =--=⨯-⨯-⨯=。
(d) CH 或DG 、J 处为虚约束,B 处为局部自由度,应消除。
6n =,p h =1,p l =8。
自由度 32362811W l h F n p p =--=⨯-⨯-=。
(e) 由于采用对称结构,其中一边的双联齿轮构成虚约束,在连接的轴颈处,外壳与支架处的连接构成一个虚约束转动副,双联齿轮与外壳一边构成虚约束。
其中的一边为复合铰链。
其中4n =,p h =2,p l =4。
自由度 32342422W l h F n p p =--=⨯-⨯-=。
(f) 其中,8n =,p h =0,p l =11。
自由度 323821102W l h F n p p =--=⨯-⨯-=。
(g) ① 当未刹车时,6n =,p h =0,p l =8,刹车机构自由度为② 当闸瓦之一刹紧车轮时,5n =,p h =0,p l =7,刹车机构自由度为③ 当两个闸瓦同时刹紧车轮时,4n =,p h =0,p l =6,刹车机构自由度为2-3 判断图示机构是否有确定的运动,若否,提出修改方案。
分析 (a) 要分析其运动是否实现设计意图,就要计算机构自由度,不难求出该机构自由度为零,即机构不能动。
机械原理课后答案

机械原理课后习题答案(顺序有点乱,不过不影响)第2章2-1 何谓构件?何谓运动副及运动副元素?运动副是如何进行分类的?答:参考教材5~7页。
2-2 机构运动简图有何用处?它能表示出原机构哪些方面的特征?答:机构运动简图可以表示机构的组成和运动传递情况,可进行运动分析,而且也可用来进行动力分析。
2-3 机构具有确定运动的条件是什么?当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况?答:参考教材12~13页。
2-4 何谓最小阻力定律?试举出在机械工程中应用最小阻力定律的1、2个实例。
2-5 在计算平面机构的自由度时,应注意哪些事项?答:参考教材15~17页。
2-6 在图2-20所示的机构中,在铰链C、B、D处,被连接的两构件上连接点的轨迹都是重合的,那么能说该机构有三个虚约束吗?为什么?答:不能,因为在铰链C、B、D中任何一处,被连接的两构件上连接点的轨迹重合是由于其他两处的作用,所以只能算一处。
2-7 何谓机构的组成原理?何谓基本杆组?它具有什么特性?如何确定基本杆组的级别及机构的级别?答:参考教材18~19页。
2-8 为何要对平面高副机构进行“高副低代"?“高副低代”应满足的条件是什么?答:参考教材20~21页。
2-9 任选三个你身边已有的或能观察到的下列常用装置(或其他装置),试画出其机构运动简图,并计算其自由度。
1)折叠桌或折叠椅;2)酒瓶软木塞开盖器;3)衣柜上的弹簧合页;4)可调臂台灯机构;5)剥线钳;6)磁带式录放音机功能键操纵机构;7)洗衣机定时器机构;8)轿车挡风玻璃雨刷机构;9)公共汽车自动开闭门机构;10)挖掘机机械臂机构;…。
2-10 请说出你自己身上腿部的髋关节、膝关节和踝关节分别可视为何种运动副?试画出仿腿部机构的机构运动简图,并计算其自由度。
2-11图示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮j输入,使轴A连续回转;而固装在轴^上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
机械原理习题集答案知识分享

平面机构的结构分析1、如图a 所示为一简易冲床的初拟设计方案,设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析其是否能实现设计意图?并提出修改方案。
解 1)取比例尺l μ绘制其机构运动简图(图b )。
2)分析其是否能实现设计意图。
图 a ) 由图b 可知,3=n ,4=l p ,1=h p ,0='p ,0='F 故:00)0142(33)2(3=--+⨯-⨯='-'-+-=F p p p n F h l因此,此简单冲床根本不能运动(即由构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架),故需要增加机构的自由度。
图 b )3)提出修改方案(图c )。
为了使此机构能运动,应增加机构的自由度(其方法是:可以在机构的适当位置增加一个活动构件和一个低副,或者用一个高副去代替一个低副,其修改方案很多,图c 给出了其中两种方案)。
图 c1) 图 c2)2、试画出图示平面机构的运动简图,并计算其自由度。
图a )解:3=n ,4=l p ,0=h p ,123=--=h l p p n F图 b )解:4=n ,5=l p ,1=h p ,123=--=h l p p n F3、计算图示平面机构的自由度。
将其中的高副化为低副。
机构中的原动件用圆弧箭头表示。
3-1解3-1:7=n ,10=l p ,0=h p ,123=--=h l p p n F ,C 、E 复合铰链。
3-2解3-2:8=n ,11=l p ,1=h p ,123=--=h l p p n F ,局部自由度3-3 解3-3:9=n ,12=l p ,2=h p ,123=--=h l p p n F4、试计算图示精压机的自由度解:10=n ,15=l p ,0=h p 解:11=n ,17=l p ,0=h p13305232=⨯-+⨯='-'+'='n p p p h l 26310232=⨯-⨯='-'+'='n p p p h l0='F 0='FF p p p n F h l '-'-+-=)2(3 F p p p n F h l '-'-+-=)2(310)10152(103=--+⨯-⨯= 10)20172(113=--+⨯-⨯=(其中E 、D 及H 均为复合铰链) (其中C 、F 、K 均为复合铰链)5、图示为一内燃机的机构简图,试计算其自由度,并分析组成此机构的基本杆组。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
θ
30°
B2 C1 C3 C2
e
H
Ex.4-4 Determine graphically the angular strokes of rockers AB and CD, respectively.
C
A
D
VB动画
B
C
A
D
φ AB
φ CD
VB动画
Ex.4-5 Shown are the two positions, B1C1 and B2C2, of coupler BC of a revolute four-bar linkage ABCD. Link AB is the driver. The pressure angle at the first position is 0o. The second position of the mechanism is a toggle position. Design the linkage.
A C1 C2
E2
B is UMRC. AE is reference link. C is circumference point. 1
A C1 C2
E2
因C1为滑块的左极限位置,所以B1点在AC1 连线上。 1
A C1 C2
E2
AC1E1和AC2E2分别代表C点相对于CE的第 一和第二个位置。 1
D
C2
1
B1
4
B
(c) Find the crank angle
VC C1 B2 F C
α 2 γ
3
ψmax
D
C2
θ
A
1
B1
4
B
(d) Find max and min.
C3
α max γ min
4
A B3
B4
D
4
Two dead-points if link DC is the driver.
A C1 C2
E2
有人将AE1C2拿来转。
1
A C1 C2
E2
Ex.4-7 In a revolute four-bar linkage ABCD, side link AB is the driver. The first position of the linkage is also a dead point.
B2 F1 F2
A B1
C is UMRC. Slider is reference link. B is circumference point.
B2
C1
C2
A B1
F1
F2
When the crank AB is located at position AB1, the slider reaches its left limit position. 所以,C1在B1A的延长线上。
100
70 45 120
Crank-rocker mechanism
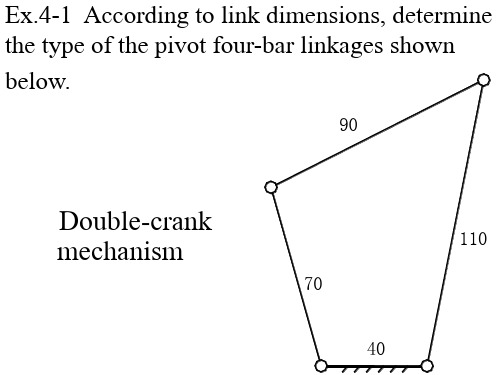
Ex.4-1 According to link dimensions, determine the type of the pivot four-bar linkages shown below.
50
Double-rocker mechanism
B2
C1
A B1
F1
F2
作B1B1’=F1F2,得B1’点。
B2
C1
A B1 ' B1
F1
F2
作B2B1’的中垂线,交B1A的延长线于待定活 动铰链点C的第一个位置点C1。
B2
C1
A B1 ' B1
F1
F2
机构第一个位置AB1C1
B2
C1
A B1 ' B1
F1
F2
作C1C2=F1F2,得C2点。
70
100
60
Ex.4-1 According to link dimensions, determine the type of the pivot four-bar linkages shown below.
Double-rocker mechanism
90
100
70
Ex.4-2 In the revolute four-bar mechanism shown below, the crank AB is a driver.
C1
C2
A
D
因为AB为原动件, 且机构第一位置的压力角 =0, 所以B1C1C1D. 不是AB1B1C1!!!
C1 B1
C2
A
D
又因为C2D为摇杆CD的一个极限位置, 所以 AB2C2三点共线。 因此BC和CD均为运动已知构件。
C1 B1
C2
A
B2
D
B is UMRC. BC is reference link. A is circumference point.
D B1 C1 A B2 C2
The second position of the mechanism is a toggle position. A, B2, C2三点共线.
D B1 C1 A B2 C2
Ex.4-6 In a crank-slider mechanism, two sets of corresponding positions between the slider and a line segment AE on the crank ABE are known. The position C1 of the slider is its left limiting position. 1
D
机构的第一个位置
C1 B1 A2 '
C2
A
B2
D
截取B2C2=B1C1 ,得B2点。
C1 B1 A2 '
C2
A
B2
D
检验运动未知构件AB的杆长:AB1=AB2。
C1 B1 A2 '
C2
A
B2
D
Ex.4-9 In an offset slider-crank mechanism ABC, when the crank AB is located at position AB1, the slider reaches its left limit position.
Ex.4-1 According to link dimensions, determine the type of the pivot four-bar linkages shown below.
90
Double-crank mechanism
70 40
110
Ex.4-1 According to link dimensions, determine the type of the pivot four-bar linkages shown below.
E2
E1
C2 D
C1 A
A2
作AA2’的中垂线,B1在此中垂线上。
E2
E1
B1
C2 D
C1 A
A2
因AB为原动件且机构第一位置为死点,所以 B1点在DC1的延长线上。AA2’的中垂线与DC1 的延长线交于B1。
E2
E1
B1
C2 D
C1 A
A2
去掉辅助线后。机构的第一个位置。
E2
E1
B1
C2 D
C2
C1
B2 A D
4
B1
Ex.4-3 In an offset slider-crank mechanism ABC, crank AB is the driver. The maximum pressure angle MAX=30. Find the stroke H of the slider and the crank angle between the two limiting positions.
D B1 C1 A B2 C2
The link AB is a driver. The pressure angle at the first position is 0o. B1C1C1D
D B1 C1 A B2 C2
The second position of the mechanism is a toggle position. A, B2, C2三点共线
C1 B1
C2
A
B2
D
A点相对于BC的第一和第二个位置。
C1 B1
C2
A
B2
D
因A点在C2B2延长线上, 故在C1B1延长线上截 取C1A2’=C2A,得A2’点。
C1 B1 A2 '
C2
A
B2
D
作AA2’的中垂线与C1B1交于待定活动铰链点 B的第一个位置点B1。
C1 B1 A2 '
C2
A
B2
C
3 2
A
D
1
4
B
(a) Find and
VC C
3 2
F A D
1
4
B
(a) Find and
VC C
3 α 2 γ
F A D
1
4
B
(b) Find the angular stroke max of the link DC.
VC C1 B2 F A C
α 2 γ
3
ψmax
B1 C1 B2 C2
The fixed pivot A must be located on the bisector of B1B2. D must be located on the bisector of C1C2. D