东南大学田玉平自动控制原理参考答案4
东南大学田玉平自动控制原理参考答案4

4.1 对于如下系统,求其传递函数。
并判别:系统是否由其传递函数完全表征?系统是否渐进稳定?是否输入-输出稳定?(1)[]0100001061161310x x u y x⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦= 解:由3261160sI A s s s -=+++=得极点为:1231,2,3s s s =-=-=-所以系统渐进稳定。
13231()()6116(1)(2)s G s C sI A B s s s s s -+=-==+++++ 所以系统为输入-输出稳定,但不能由G (s )完全表征。
(2)[]010000102500550510x x u y x⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦=-解:由3252500sI A s s -=+-=得1235,55,55s s i s i ==-+=--所以不是渐进稳定。
G(s)=C(sI-A)1-B=C 1502501001-⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+---s s sB=)5)(55)(55()5(50--+++-s j s j s s .=)55)(55(50j s j s -+++所以系统是输入-输出稳定,但不能由G (s )完全表征。
(3)[]110001010002110x x u y x-⎡⎤⎡⎤⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦=- 解:由3220sI A s s s -=++=得1230,1,1s s s ==-=-所以系统不是渐进稳定。
12()()(1)sG s C sI A B s --=-=+ 所以系统是输入-输出稳定,但不能由G (s )完全表征。
(4)(a )解:25()27s G s s s -=+-,1,21s =-± 所以既不是渐进稳定,又不是输入-输出稳定。
系统可由其传递函数完全表征。
.(b )解:)54)(1()1)(3()(2++-++=s s s s s S G .,有极点在右半平面所以既不是渐进稳定,又不是输入-输出稳定。
自动控制原理课后习题答案

第1章控制系统概述【课后自测】1-1 试列举几个日常生活中的开环控制和闭环控制系统,说明它们的工作原理并比较开环控制和闭环控制的优缺点。
解:开环控制——半自动、全自动洗衣机的洗衣过程。
工作原理:被控制量为衣服的干净度。
洗衣人先观察衣服的脏污程度,根据自己的经验,设定洗涤、漂洗时间,洗衣机按照设定程序完成洗涤漂洗任务。
系统输出量(即衣服的干净度)的信息没有通过任何装置反馈到输入端,对系统的控制不起作用,因此为开环控制。
闭环控制——卫生间蓄水箱的蓄水量控制系统和空调、冰箱的温度控制系统。
工作原理:以卫生间蓄水箱蓄水量控制为例,系统的被控制量(输出量)为蓄水箱水位(反应蓄水量)。
水位由浮子测量,并通过杠杆作用于供水阀门(即反馈至输入端),控制供水量,形成闭环控制。
当水位达到蓄水量上限高度时,阀门全关(按要求事先设计好杠杆比例),系统处于平衡状态。
一旦用水,水位降低,浮子随之下沉,通过杠杆打开供水阀门,下沉越深,阀门开度越大,供水量越大,直到水位升至蓄水量上限高度,阀门全关,系统再次处于平衡状态。
开环控制和闭环控制的优缺点如下表1-2 自动控制系统通常有哪些环节组成各个环节分别的作用是什么解:自动控制系统包括被控对象、给定元件、检测反馈元件、比较元件、放大元件和执行元件。
各个基本单元的功能如下:(1)被控对象—又称受控对象或对象,指在控制过程中受到操纵控制的机器设备或过程。
(2)给定元件—可以设置系统控制指令的装置,可用于给出与期望输出量相对应的系统输入量。
(3)检测反馈元件—测量被控量的实际值并将其转换为与输入信号同类的物理量,再反馈到系统输入端作比较,一般为各类传感器。
(4)比较元件—把测量元件检测的被控量实际值与给定元件给出的给定值进行比较,分析计算并产生反应两者差值的偏差信号。
常用的比较元件有差动放大器、机械差动装置和电桥等。
(5)放大元件—当比较元件产生的偏差信号比较微弱不足以驱动执行元件动作时,可通过放大元件将微弱信号作线性放大。
东南大学田玉平自控原理参考答案

2.8试对下图所示的系统方块图进行化简并求出其闭环传递函数C(s)/R(s)化简得:C(s) ____________ GGG H i) _______________R(s) 1 G2H2 -G3H3(H i G2) GGG H i)2.9化简得:C(s) G1G2G3G4丽-(1 GH i)(1 G4H4MI G2H2X I G3H3) G2G3H5] GG2G3G4H62.10求信号流图的传递函数(a)解:有6个前向通道:Q i(s) =GGG7Q2(S)二GGG8Q3(S)二G2G4G8Q4(S)二G2G5G7Q5(s)二-GGH2G5G7Q e(s)八G2G5HGG8共有三个回路,分别为:L,(s)八G3H1L2(s) = -G4H2L_3(S)=G5G6H I H2(s^1 G3H1 G4H^G5G6H1H2 G3H1G4H2,s) =1 G4H22(s) -13(S)- 1 G3H14(S) =15(S) =16(S)=1GQG7(1 G4H2) GGA QG q G g。
G3H1) G2G5G - GQH2G5G7 - G2G5H1GJG8 G (s)-1+G3H<H G4H^G5G6H1H<H G3H1G4H2(b)共有4条前向通道,分别为:Q i(s) = G1G2G3G4G5G6Q2(S)二G3G4G5G6Q3(s)二GGQ4(S)八G e H i共有9条回路,分别为:L|(s)二-G?H iL2(s) = - G4 H 2L3G)八GetL4(s) = -G3G4G5H4L5G)八GG2G3G4G5G6H5Q(s)十出( s) - - G3G4G5G6 H5L7L B(S)二H1H5G6L9(s^ -G6H5G1(s) =1 G2H1 G4H2 G6H3 G1G2G3G4G5G6H5 G2H1G4H2G2HGH3 G4H2G6H3 G2H1G4H2G6H3 -H i H4 G3G4G5G6H5-G1H5G6 G6H5G -G q H z H i H s G e G4H2GH5G6-G4H2H i H4、1(S)=12(S)=1、3(S)=1 G4H2、4(S)=1 G4H2G1G2G3G4G5G6 G3G4G5G6 G1G6(1 G4H2)- G6H1(1 G4H2)(s)(c)共有2条前向通路,分别是:Q[(s) =abcdQ2(s)二aed共有6条回路,分别是:J(s)二bgL2(s) =chL3G) = fL4(s) =kbcl_5(s)二keL s(s)二eghabed + aed(1- f)1 - bg - ch - f - kbc - ke - egh kfe(d)有4条前向通道,分别是:Q1 (s)二adeQ2(s)二aQ3(s)二bcdeQ4(s)二bc有4条回路,分别是:LJs)「-cfL2(s)八egR(s)「-adehL4(s)「-bcdehade a aeg bcde be bceg G(S)- 1 + cf + eg + adeh + bcdeh+ cfeg G(s)-1 +G1G 3H 1H ^G 1G 2H 1H 22.13画出极坐标图,求与实轴相交的频率和相应的幅值。
东南大学田玉平自控原理参考-答案~2

化简得:
2.9
化简得:
2.10求信号流图的传递函数
(a)
解:有6个前向通道:
共有三个回路,分别为:
(b)
共有4条前向通道,分别为:
共有9条回路,分别为:
(c)
共有2条前向通路,分别是:
共有6条回路,分别是:
(d)
有4条前向通道,分别是:
当 ,可得K=6.6
所以
2.16设三个最小相位系统的折线对数幅频特性
(1)写出对应的传递函数
(2)绘出对数相频曲线和幅相曲线。
(a)解:比例环节、两个惯性环节构成,传递函数为:
G(s)= ,G(jw)= ,
由伯得图可得20lgK=40;K=100;
(b)解:积分环节、惯性环节、一阶微分环节构成
传递函数为:
转折点为1,10;
相频特性: =-0.1w- -arctanw-arctan0.1w
当截止频率w =5rad/s时,|G(jw)|=1,
20lgK-20lgw| -20lgw| =0
K=25;
2.15
解:通过作图,得到三个转折点分别为(0.48,20.5),(3,-10)和(8,-17.5),
因此, , , ,可写出如下传递函数:
2.14 (1) G(jw)= =
幅频特性:|G(jw)|=
L(w)=20lg|G(jw)|=20lg
转折点为5,50.
相频特性: = -arctan
当截止频率w =5rad/s时,|G(jw)|=1,所以增益K= ,
(2) G(jw)= =
幅频特性:|G(jw)|=
L(w)=20lg|G(jw)|=20lg
自动控制原理 课后习题答案

【课后自测】1-1 试列举几个日常生活中的开环控制和闭环控制系统,说明它们的工作原理并比较开环控制和闭环控制的优缺点。
解:开环控制——半自动、全自动洗衣机的洗衣过程。
工作原理:被控制量为衣服的干净度。
洗衣人先观察衣服的脏污程度,根据自己的经验,设定洗涤、漂洗时间,洗衣机按照设定程序完成洗涤漂洗任务。
系统输出量(即衣服的干净度)的信息没有通过任何装置反馈到输入端,对系统的控制不起作用,因此为开环控制。
闭环控制——卫生间蓄水箱的蓄水量控制系统和空调、冰箱的温度控制系统。
工作原理:以卫生间蓄水箱蓄水量控制为例,系统的被控制量(输出量)为蓄水箱水位(反应蓄水量)。
水位由浮子测量,并通过杠杆作用于供水阀门(即反馈至输入端),控制供水量,形成闭环控制。
当水位达到蓄水量上限高度时,阀门全关(按要求事先设计好杠杆比例),系统处于平衡状态。
一旦用水,水位降低,浮子随之下沉,通过杠杆打开供水阀门,下沉越深,阀门开度越大,供水量越大,直到水位升至蓄水量上限高度,阀门全关,系统再次处于平衡状态。
开环控制和闭环控制的优缺点如下表1-2 自动控制系统通常有哪些环节组成?各个环节分别的作用是什么?解:自动控制系统包括被控对象、给定元件、检测反馈元件、比较元件、放大元件和执行元件。
各个基本单元的功能如下:(1)被控对象—又称受控对象或对象,指在控制过程中受到操纵控制的机器设备或过程。
(2)给定元件—可以设置系统控制指令的装置,可用于给出与期望输出量相对应的系统输入量。
(3)检测反馈元件—测量被控量的实际值并将其转换为与输入信号同类的物理量,再反馈到系统输入端作比较,一般为各类传感器。
(4)比较元件—把测量元件检测的被控量实际值与给定元件给出的给定值进行比较,分析计算并产生反应两者差值的偏差信号。
常用的比较元件有差动放大器、机械差动装置和电桥等。
(5)放大元件—当比较元件产生的偏差信号比较微弱不足以驱动执行元件动作时,可通过放大元件将微弱信号作线性放大。
自动控制原理第四版习题答案
&& & = RC 1 C 2 u i ( t ) + 2 RC 1 u i ( t ) + u i ( t )
(2-5题~2-10题) 题 题 2-5(1) 运动模态: 0.5 t 运动模态: e (2) 运动模态: 0.5 t 运动模态: e
sin
3 2
t
x( t ) = t - 2 + 2e 0.5 t x ( t ) = 2 3 3 e 0.5 t sin 23 t
x ( t ) = 1 ( 1 + t )e t
(3) 运动模态: (1+t)e-t 运动模态: 2-6 2-7 2-8
Q =
F = 12 .11 y ed = E do (sin α o )( α α o )
0.0125 s + 1.25
(2) Φ ( s ) =
ξ = 0.6 ωn = 2 r = 1.0066 ω n = 1
t r = 1.45 s
0.1 5 50 ( s + 4 ) (3) Φ ( s ) = + s( 3 s + 1 ) s2 s 2 + 16 σ % = 9.478% t p = 1.96 s t s = 2.917 s
dc(t ) k (t ) = = δ(t ) + 2e 2t e t dt
k2 2 Qo
P
s 2 + 4s + 2 2-9 Φ (s) = (s + 1)(s + 2)
东南大学自控原理试卷(11-12)答案

自控原理试卷(11-12)标准答案一、简答题1、开环控制系统无反馈回路,结构简单,成本较低,但是控制精度低,容易受到外界干扰,输出出现误差无法进行补偿;闭环控制结构相对复杂,但能在有不可预知的干扰的情况下,使得输出量和参考输入量之间的偏差尽可能小。
2、如果系统开环传递函数在右半平面没有零、极点,那么该系统为最小相位系统; 有延迟环节的系统不属于最小相位系统。
3、一个连续时间线性定常系统输入-输出稳定的充分必要条件是其微分方程的特征方程的根(即传递函数的极点)全部具有负的实部。
4、存在矛盾之处,三阶系统例子。
5、状态反馈不会改变系统的能控性,输出反馈也不会改变系统的能控性; 输出反馈不会改变系统的能观性,状态反馈有可能改变系统的能观性。
二、综合题1、 13223232143211s (H G G H G G G G G G G G G G -++=)2、 解: ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=11126621641k Q 验证:0=k Q ,可以知道n rankQ k <,所以系统不完全可控。
⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=1016104101g Qn rankQ k <=2 系统不完全可观3、 解:由已知条件可知91=a ,52=a ,33=a ,00=b ,11=b ,42=b ,13=b 选取状态变量 y x =1,y x =2,yx =3, 则 00=β,11=β,52-=β,413=β于是得到系统状态空间表达式为u X X ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=4151953100010 []X y 001= 4、26313,2js ±=,12=K5、⎥⎦⎤⎢⎣⎡+-+---=-=-t t tt t t tt e e e e e e e e t t 222212222)()(ΦΦ6、系统的闭环传递函数为Ks s s s Ks R s C ++++=)2)(1()()(2所以系统的特征方程为D (s )=0233234=++++K s s s s 劳斯表如下:Ks K s Ks s Ks 01234792372331-需满足:0792,0>->kK解得系统闭环稳定的K 的取值范围为:0<K<14/97、①6,5,3321-=-=-=λλλ;②-A⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=6-5-3-⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=-3/12/16/1B。
自动控制原理 4-5章习题与解答习题课后校对稿
可知: K 增大时, % , t p 。
4
4-9 设电子心率起搏器系统如图 4-41 所示,其中模仿心脏的传递函数相当于一个纯积 分器。要求:
(1)若 0.5 对应于最佳响应情况,问该情况下起搏器的增益 K 应为多大?
(2)若期望心速为 60 次/min,并突然接通起搏器,问 1 s 后实际心速为多少?瞬时最大 心率为多大?
10(s 2) , s2 (s 20)
以及 R(s) 1 s
2 s2
则 T (s) Y (s) 10 。 R(s) s 20
4-5 某控制系统结构图如图 4-38 所示,其中 K1 5 , T1 0.5 。 (1)求系统的单位阶跃响应; (2)计算系统的性能指标 tr , t p , ts ( 5% ), % ;
T1 5T1
(1)该系统的单位阶跃响应为
y(t) 2.51
e nt 1 2
sin(d t
)
2.51
23 3
e nt
sin(
3t
)
3
2.51
1.1547e t
sin(1.7321t
3
)
(2)系统的性能指标为:
解之得: K 25 , n 25
(2)闭环传递函数写为: T (s)
s2
625 25s 625
,闭环极点 s1,2
12.5
j12.5
3。
方法一:系统的阶跃响应为
y(t) 1
1 1
2
e nt
sin( n
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4.1 对于如下系统,求其传递函数。
并判别:系统是否由其传递函数完全表征?系统是否渐进稳定?是否输入-输出稳定?(1)[]0100001061161310x x u y x⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦= 解:由3261160sI A s s s -=+++=得极点为:1231,2,3s s s =-=-=-所以系统渐进稳定。
13231()()6116(1)(2)s G s C sI A B s s s s s -+=-==+++++ 所以系统为输入-输出稳定,但不能由G (s )完全表征。
(2)[]010000102500550510x x u y x⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦=-解:由3252500sI A s s -=+-=得1235,55,55s s i s i ==-+=--所以不是渐进稳定。
G(s)=C(sI-A)1-B=C 1502501001-⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+---s s sB=)5)(55)(55()5(50--+++-s j s j s s .=)55)(55(50j s j s -+++所以系统是输入-输出稳定,但不能由G (s )完全表征。
(3)[]110001010002110x x u y x-⎡⎤⎡⎤⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦=- 解:由3220sI A s s s -=++=得1230,1,1s s s ==-=-所以系统不是渐进稳定。
12()()(1)sG s C sI A B s --=-=+ 所以系统是输入-输出稳定,但不能由G (s )完全表征。
(4)(a )解:25()27s G s s s -=+-,1,21s =-± 所以既不是渐进稳定,又不是输入-输出稳定。
系统可由其传递函数完全表征。
.(b )解:)54)(1()1)(3()(2++-++=s s s s s S G .,有极点在右半平面所以既不是渐进稳定,又不是输入-输出稳定。
系统可由其传递函数完全表征。
(c )解:1()(1)(3)s G s s s -=++,有对消的零极点s=1在右半平面,所以系统不能由传递函数完全表征,不是渐进稳定,是输入-输出稳定4.2 已知系统的特征方程如下,分别用劳斯和霍尔维茨判据判别稳定性。
(1)010092023=+++s s s100410020910123ss s s , D=10020091010020 D 1>0, D 2=80>0, D 3=8000>0故该系统将近稳定。
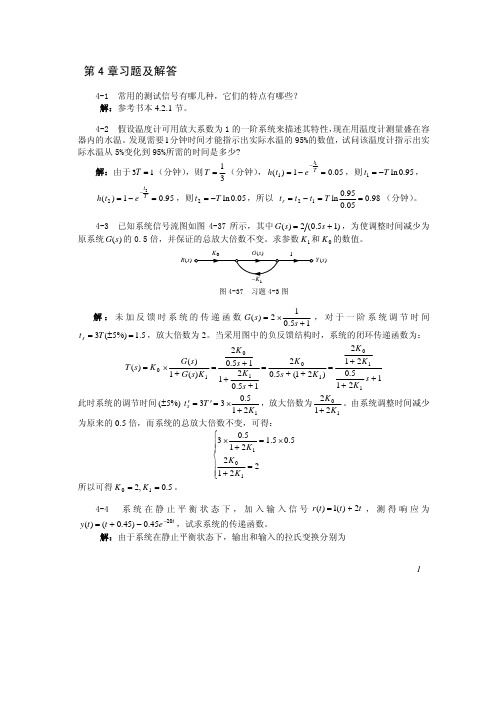
(2)322092000s s s +++=解:3211920020010200s s s s -123202000190020200200,200,40000D D D D =∴=>=-<=-<所以,系统不稳定(3)025103234=++++s s s s147/5317.411025301234s s s s s -,D=2531100025300110D 1=10>0; D 2=47>0, D 3=-153<0, D 4=-306<0 ; 所以系统不稳定;(4)6543244478100s s s s s s +-+--+=解:6543210147104480551020102.5109010s s s s s s s ---------辅助多项式423()5510()2010p s s s p s s s=--+=-- 1234448000147100004480014710000448001471040,20,0,320D D D D D ----=-----∴=>=-==-所以不稳定(5)025.666)256)(4)(2(2=+++++s s s s 解: 025.8661986912234=++++s s s s25.866025.8665.521981225.86669101234s s s s s ε←,D=25.8666910198120025.8666910019812D 1=12>0 , D 2=630>0 , D 3=0 , D 4=0;所以该系统临界稳定;(6)4328181650s s s s ++++=解:4321011858161652725s s s s s 12348160011850081600118580,1280,4480,22400D D D D D ==>=>=>=> 所以系统稳定4.3 确定使系统稳定的12K K 和 (a )解:132111(1)()(21)K s G s s K s K s K +=++++ 由劳斯判据得1K >0 (b )解:32210(1)()2(101)1010s G s s K s s +=++++ 由劳斯判据得2K >0.14.4 某单位反馈系统的开环传递函数为02()(717)KG s s s s =++ (1)确定使系统稳定的K 的临界值。
(2)若要求闭环节点的实部均小于-2,求K 的取值范围 解:(1)闭环传递函数为:32()717KG s s s s K=+++ 由劳斯判据:321117711907s s K K ss K-得0119K<< 故临界值时 K=119(2)令2s p =-,得32140p p p K +++-=由劳斯判据:32101111415014p p K p K p K ---得1415K <<4.5 已知系统的开环传递函数为0(1)()(1)(21)K s G s s s s τ+=++,试用劳斯判据确定使系统稳定的参数,K τ的范围。
解:32(1)()2(2)(1)K s G s s s K s Kττ+=+++++由劳斯判据:321212(22)2s K s K K K ss Kτττττ++-+++得002K τ>⎧⎨<<⎩ 或 2202K τττ>⎧⎪⎨+<<⎪-⎩4.6 已知系统做等幅震荡,确定系统参数,K α的值 解:其特征方程为:32(2)10s s K s K α+++++=由劳斯判据:321121(2)(1)1s K s K K K ss K ααα+++-++若(2)(1)KK α+-+=0则辅助多项式2()1()2p s s K p s sαα=++=判据为:32112121s Ks Kss Kαα+++所以系统参数应满足1(2)1 KK Kαα≥⎧⎪≥-⎨⎪+=+⎩4.9 由零极点确定根轨迹草图。
4.10(1) (2)利用劳斯判据,可求的:01.08.07.1123=++++K s s s 因为该系统极点都在左半平面,所以该系统稳定1111231.07.126.11.07.18.01K s K s K s s +-+ 所以20K >⎪⎪⎩⎪⎪⎨⎧>>+>-001.007.126.1111K K K 求得:0<K 1<1.26(3) (4)06510854123234=+++++K s s s s 0)5.01(2.0442=+-+K s K s3313233465154136065451081265541K s K s K ss K s +-++ 441425.012.0K s K s K s -340>K 3>0402K <<4.11证明:π-=∠+∠+∠-)(131211S P S P S P ∴ 所以1s 是根轨迹上的一点。
11223312K p s p s p s =⋅⋅= 4.12(1)1,1,2N P Z ===,系统不稳定 (2)1,1,0N P Z =-==,系统稳定 (3)0,2,2N P Z ===,系统不稳定 (4)2,0,2N P Z ===,系统不稳定 (5)2,2,0N P Z =-==,系统稳定 (6)0,0,0N P Z ===,系统稳定 (7)1,1,0N P Z =-==,系统稳定(8)1,1,2N P Z ===,系统不稳定4.13 绘制开环系统奈奎斯特曲线,并判断系统稳定性和K 的关系 (1)0()(0.11)(0.51)KG s s s s =++012K <<时系统稳定(2)0()(1)(2)(3)KG s s s s =+++060K <<时系统稳定(3)0(21)()(1)K s G s s s +=-0.5K >时系统稳定4.14 (1)由图得:系统稳定(2)相角裕度为33度,幅值裕度为9.2dB 。
(3)临界稳定时,K=28670(4)相角裕度为40度时,K=7366。
4.15 开环传递函数为021()s G s sτ+=,计算相角裕度为45度时,τ的值解:0()180135c G j ωγ∠=-+=-︒即arctan()180135c τω-︒=-︒,得c τω=1 又由0()1c G j ω=得0.252c ω= 所以0.2520.84τ-==4.16 420)1()(5)(+=-jw e jw jw G jwτ 当|G(jw)|=1 时 求得c w o c c c w w jw G 180arctan 4180)(0-=--=∠το 解得: τ = 43.1所以当τ < 43.1时,系统稳定4.17(1)幅值裕度无穷大,相角裕度12度。
(3)幅值裕度18dB ,相角裕度180度。
(5)不稳定(7)不稳定4.18 解: 系统的传递函数为: 10)110(10)()(1)()()(2+-+=+=s K s S H s G s G s R s C h 由劳斯判据可进行解决, 10110101012s K s s h - 当10K h -1>0时,系统稳定,当10K h -1=0时,系统临界稳定,此时传递函数的极点2,1s =±10j ,K h =0.1。