CCD灵敏度试验
CCD 灵敏度试验
和往年一样,立秋之后是一个晴天。2001年8月7日晚,在明亮的夜空中可以分辨出天蝎座的一些亮星。用200毫米F4照相镜头拍摄了天蝎α附近的几颗星,测试一下CCD 的灵敏度。
将摄像头设置并固定为最长曝光时间,拍摄了四颗星的照片。由于每次找星时都要换上目镜,再重新调焦,因此4张照片并不具备严格的可比性。
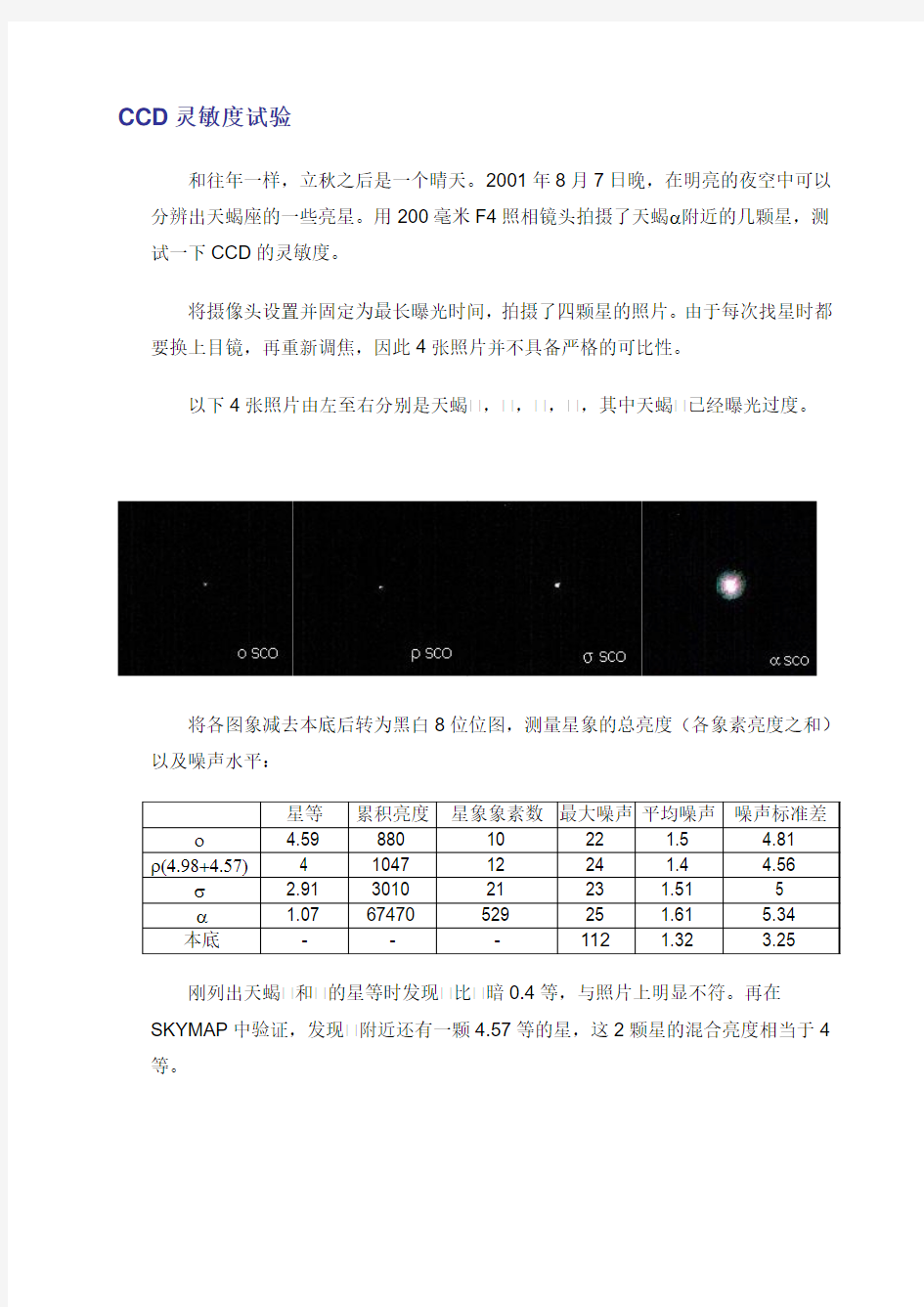
以下4张照片由左至右分别是天蝎 , , , ,其中天蝎 已经曝光过度。
将各图象减去本底后转为黑白8位位图,测量星象的总亮度(各象素亮度之和)以及噪声水平:
刚列出天蝎 和 的星等时发现 比 暗0.4等,与照片上明显不符。再在
SKYMAP 中验证,发现 附近还有一颗4.57等的星,这2颗星的混合亮度相当于4等。
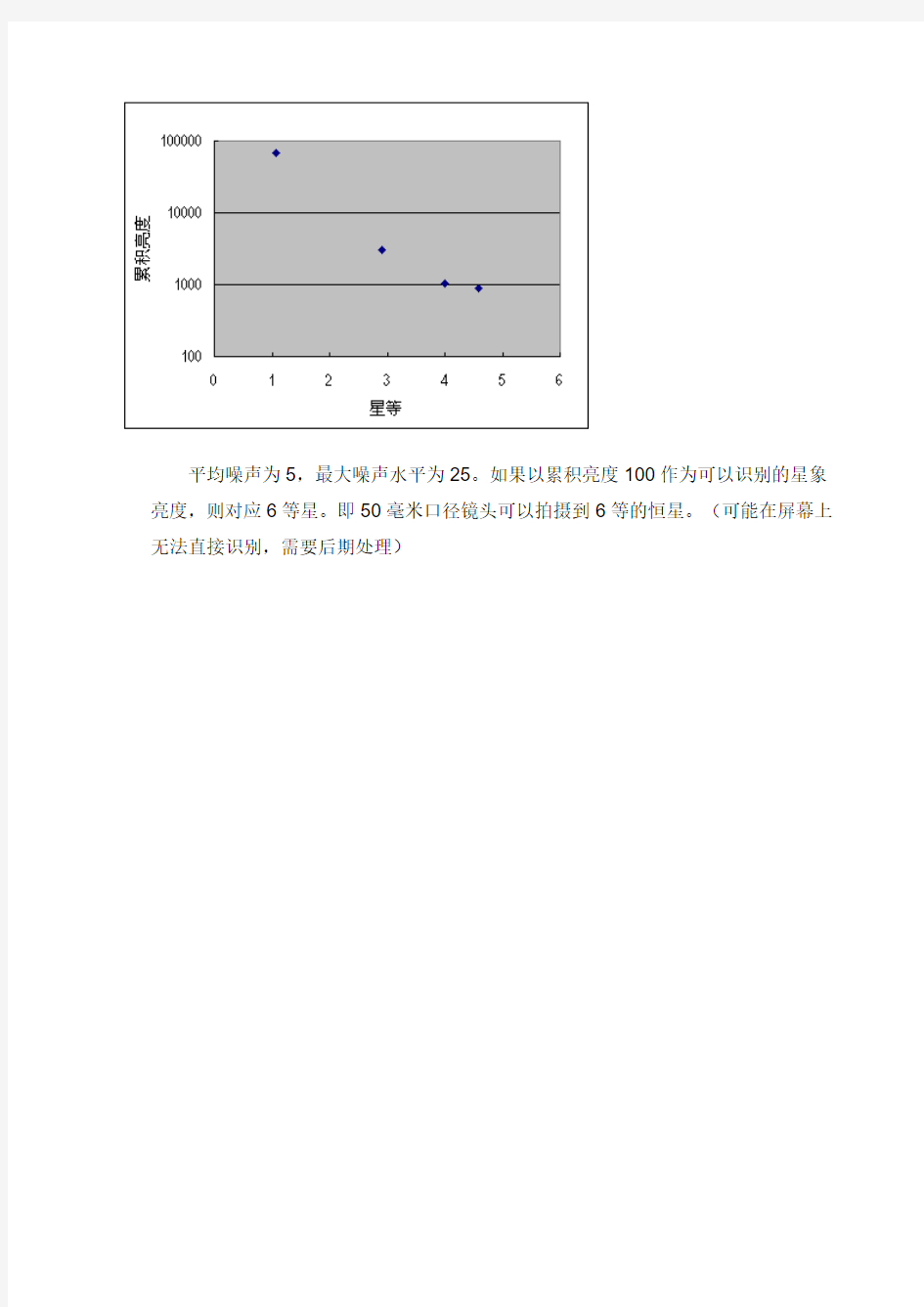
平均噪声为5,最大噪声水平为25。如果以累积亮度100作为可以识别的星象亮度,则对应6等星。即50毫米口径镜头可以拍摄到6等的恒星。(可能在屏幕上无法直接识别,需要后期处理)
机械结构实验模态分析实验报告书
《机械结构实验模态分析》实验报告 开课实验室:汽车结构实验室 2019年月日 学院 姓名 成绩 课程 名称 机械结构实验模态分析 实验项目 名 称 机械结构实验模态分析 指导教师 教师评语 教师签名: 年 月 日 机械结构实验模态分析实验报告 一、实验目的和意义 模态分析技术是近年来在国内外得到迅速发展的一门新兴科学技术,广泛应用于航空、航天、机械制造、建筑、汽车等许多领域,在识别系统的动力学参数、动态优化设计、设备故障诊断等许多方面发挥了日益重要的作用。 本实验采用CCDS-1模态分析微机系统,对图1所示的框架结构进行分析。通过该实验达到如下目的: 212019 1817 16 1514 13121110 987 6 5 4 3 222120 20 202090 9090 90 90909090113 113 113 113 113 113 115 115 115 115 图1 框架结构图 详细了解CCDAS-1模态分析微机系统,并熟练掌握使用本系统的全过程,包括 了解测量点和激振点的选择。 了解模态分析实验采用的仪器,实验的连接、安装和调整。 1、 激励振时各测点力信号和响应信号的测量及利用这些测量信号求取传递函数,并分析影响传递 函数精度的因素。 2、 SSDAS-1系统由各测点识别出系统的模态参数的步骤。 3、 动画显示。 4、 灵敏度分析及含义。 通过CCDAS-1模态分析的全部过程及有关学习,能祥述实验模态的一般步骤。 通过实验和分析,大大提高综合分析能力和动手能力。
CCDAS-1系统模态分析的优缺点讨论并提出改进实验的意见。 二、测试及数据处理框图 加速度传感器 力传感器 脉冲锤 四个点由橡胶绳悬挂 1724 打印机 IBM PC 微型计算机 含AD板 CCMAS-1模态分析软件 双通道低 通滤波器 电荷放大器 电荷放大器 图2 测量及数据处理系统框图 三、实验模态分析的基本原理 对于一个机构系统,其动态特性可用系统的固有频率、阻尼和振型来描述,与模态质量和模态刚度一起通称为机械系统的模态参数。模态参数既可以用有限元的方法对结构进行简化得到,也可以通过激振实验对采集的振动数据进行处理识别得到。通过实验数据求取模态参数的方法就是实验模态分析。只要保证测试仪器的精度、实验条件和数据分析处理的精度就能获得高质量的模态参数。 一个线性系统,若在某一点j 施加激振力j F ,系统各点的振动响应为i X 1,2,...,i n =,系统任意两点的传递函数ij h 之间的关系可用矩阵表示如下: 11112122122212()... 0()...()...()...0n n j n n n nn x h h h x h h h F x h h h ωωωω?????? ???????????? =??? ??????????????? ??????M M M O M (1-1) 可记为:{}{}[]X H F = []H 称为传递函数矩阵。其中的任意元素ij h 可以通过激振实验得到 () () i ij j X h F ωω= ()i X ω,()j F ω分别表示响应i X 与激振力j F 的傅立叶变换。 测量方法是给系统施加一有限带宽频率的激振力(冲击也是一有限带宽激振力),同时测量系统的响应,将力和响应信号进行滤波,A/D 转换并离散采样,进行双通道FFT 变换,计算出激振力j F 与响应i X 之间的传递函数ij h 。 对测量的传递函数进行曲线拟和得到模态参数,一个多自由度系统曲线拟和传递函数的解析式为:* * 1 ()[]n ijk ijk ij k k k r r h S S P S P == - --∑ (1-3)
振动试验基本知识
专业知识 1、振动试验基本知识 1.1 振动试验方法 试验方法包括试验目的,一般说明、试验要求、严酷等级及试验程序等几个主要部分。为了完成试验程序中规定的试验,在振动试验方法中又规定了“正弦振动试验”和“随机振动试验”两种型式的试验方法。 正弦振动试验 正弦振动试验控制的参数主要是两个,即频率和幅值。依照频率变和不变分为定频和扫频两种。 定频试验主要用于: a)耐共振频率处理:在产品振动频响检查时发现的明显共振频率点上,施加规定振动参数振幅的振动,以考核产品耐共振振动的能力。 b)耐予定频率处理:在已知产品使用环境条件振动频率时,可采用耐予定频率的振动试验,其目的还是为考核产品在予定危险频率下承受振动的能力。 扫频试验主要用于: ●产品振动频响的检查(即最初共振检查):确定共振点及工作的稳定性,找出产品共振频率,以做耐振处理。 ●耐扫频处理:当产品在使用频率范围内无共振点时,或有数个不明显的谐振点,必须进行耐扫频处理,扫频处理方式在低频段采用定位移幅值,高频段采用定加速度幅值的对数连续扫描,其交越频率一般在55-72Hz,扫频速率一般按每分钟一个倍频进行。 ●最后共振检查:以产品振动频响检查相同的方法检查产品经耐振处理后,各共振点 有无改变,以确定产品通过耐振处理后的可靠程度。 随机振动试验 随机振动试验按实际环境要求有以下几种类型:宽带随机振动试验、窄带随机振动试验、宽带随机加上一个或数个正弦信号、宽带随机加上一个或数个窄带随机。前两种是随机试验,后两种是混合型也可以归入随机试验。 电动振动台的工作原理是基于载流导体在磁场中受到电磁力作用的安培定律。 1.2 机械环境试验方法标准 电工电子产品环境试验国家标准汇编(第二版)2001年4月 汇编中汇集了截止目前我国正式发布实施的环境试验方面的国家标准72项,其中有近50项不同程度地采用IEC标准,内容包括:总则、名词术语、各种试验方法、试验导则及环境参数测量方法标准。 其中常用的机械环境试验方法标准: (1)GB/T 2423.5-1995 电工电子产品环境试验第2部分:试验方法 试验Ea和导则:冲击 (2)GB/T 2423.6-1995 电工电子产品环境试验第2部分:试验方法 试验Eb和导则:碰撞 (3)GB/T 2423.7-1995 电工电子产品环境试验第2部分:试验方法 试验Ec和导则:倾跌与翻倒(主要用于设备型产品) (4)GB/T 2423.8-1995 电工电子产品环境试验第2部分:试验方法 试验Ed和导则:自由跌落 (5)GB/T 2423.10-1995 电工电子产品环境试验第2部分:试验方法 试验Fc和导则:振动(正弦) (6)GB/T 2423.11-1997 电工电子产品环境试验第2部分:试验方法
模态试验及分析的基本步骤
模态试验及分析的基本步骤 1.动态数据的采集及响应函数分析 首先应选取适当的激励方式。激励方式可以是正弦、随机或瞬态中的任何一种。激励方式不同,相应的模态参数识别方法也不同。目前主要有单输入单输出、单输入多输出和多输入多输出三种方法。然后进行数据采集。对于单输入单输出方法要求同时高速采集输入与输出两个点的信号,用不断移动激励点位置或响应点位置的办法取得振型数据;单输入多输出及多输入多输出的方法要求大量通道数据的高速采集,因此要求大量的振动测量传感器或激振器,试验成本极高。在采集信号数据以后,还要在时域或频域对信号进行处理,例如谱分析、传递函数估计、脉冲响应测量以及滤波、相关分析等。 2.建立结构数学模型 根据己知条件,建立一种描述结构状态及特性的模型,作为计算及参数识别的依据,目前一般假定系统为线性的。由于采用的识别方法不同,数学建模可分为频域建模和时域建模。根据阻尼特性及频率藕合程度又可分为实模态和复模态等。 3.参数识别 按识别域的不同可分为频域法、时域法和混合域法。激励方式不同,相应的识别参数方法也不尽相同。并非越复杂的方法识别的结果越可靠。对于目前能够进行的大多数不是十分复杂的结构,只要取得了可靠的频响数据,用简单的识别方法也可能获得良好的模态参数;反之,即使用最复杂的数学模型、最高级的拟合方法,如果频响测量数据不可靠,识别的结果也不会理想。 4.振型动画 参数识别的结果得到了结构的模态参数模型,即一组固有频率、模态阻尼以及相应各阶模态的振型。但是由于结构复杂,由许多自由度组成的振型的数组难以引起对振动直观的想象,所以必须采用振型动画的办法,将放大的振型叠加到原始的几何形状上。
模态分析中的几个基本概念模态分析中的几个基本概念分析
模态分析中的几个基本概念 物体按照某一阶固有频率振动时,物体上各个点偏离平衡位置的位移是满足一定的比例关系的,可以用一个向量表示,这个就称之为模态。模态这个概念一般是在振动领域所用,你可以初步的理解为振动状态,我们都知道每个物体都具有自己的固有频率,在外力的激励作用下,物体会表现出不同的振动特性。一阶模态是外力的激励频率与物体固有频率相等的时候出现的,此时物体的振动形态叫做一阶振型或主振型;二阶模态是外力的激励频率是物体固有频率的两倍时候出现,此时的振动外形叫做二阶振型,以依次类推。一般来讲,外界激励的频率非常复杂,物体在这种复杂的外界激励下的振动反应是各阶振型的复合。模态是结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。这些模态参数可以由计算或试验分析取得,这样一个计算或试验分析过程称为模态分析。有限元中模态分析的本质是求矩阵的特征值问题,所以“阶数”就是指特征值的个数。将特征值从小到大排列就是阶次。实际的分析对象是无限维的,所以其模态具有无穷阶。但是对于运动起主导作用的只是前面的几阶模态,所以计算时根据需要计算前几阶的。一个物体有很多个固有振动频率(理论上无穷多个),按照从小到大顺序,第一个就叫第一阶固有频率,依次类推。所以模态的阶数就是对应的固有频率的阶数。振型是指体系的一种固有的特性。它与固有频率相对应,即为对应固有频率体系自身振动的形态。每一阶固有频率都对应一种振型。振型与体系实际的振动形态不一定相同。振型对应于频率而言,一个固有频率对应于一个振型。按照频率从低到高的排列,来说第一振型,第二振型等等。此处的振型就是指在该固有频率下结构的振动形态,频率越高则振动周期越小。在实验中,我们就是通过用一定的频率对结构进行激振,观测相应点的位移状况,当观测点的位移达到最大时,此时频率即为固有频率。实际结构的振动形态并不是一个规则的形状,而是各阶振型相叠加的结果。 固有频率也称为自然频率( natural frequency)。物体做自由振动时,其位移随时间按正弦或余弦规律变化,振动的频率与初始条件无关,而仅与系统的固有特性有关(如质量、形状、材质等),称为固有频率,其对应周期称为固有周期。 物体做自由振动时,其位移随时间按正弦规律变化,又称为简谐振动。简谐振动的振幅及初相位与振动的初始条件有关,振动的周期或频率与初始条件无关,而与系统的固有特性有关,称为固有频率或者固有周期。 物体的频率与它的硬度、质量、外形尺寸有关,当其发生形变时,弹力使其恢复。弹力主要与尺寸和硬度有关,质量影响其加速度。同样外形时,硬度高的频率高,质量大的频率低。一个系统的质量分布,内部的弹性以及其他的力学性质决定 模态扩展是为了是结果在后处理器中观察而设置的,原因如下: 求解器的输出内容主要是固有频率,固有频率被写到输出文件Jobname.OUT 及振型文件Jobnmae.MODE 中,输出内容中也可以包含缩减的振型和参与因子表,这取决于对分析选项和输出控制的设置,由于振型现在还没有被写到数据库或结果文件中,因此不能对结果进行后处理,要进行后处理,必须对模态进行扩展。在模态分析中,我们用“扩展”这个词指将振型写入结果文件。也就是说,扩展模态不仅适用于Reduced 模态提取方法得到的缩减振型,而且也适用与其他模态提取方法得到的完整振型。因此,如果想在后处理器中观察振型,必须先扩展模态。谱分析中的模态合并是因为激励谱是其实是由一系列的激励组合成的一个谱,里面的频率不会是只有一个,而不同的激励频率对于结构产生的结果是不一样的,对于结果的贡献也是不一样的,所以要选择模态组合法对模态进行组合,得到最终的响应结果。
试验模态分析的两种方法
试验模态分析的两种方法 模态分析是研究结构动力特性一种近代方法,是系统辨别方法在工程振动领域中的应用。模态是机械结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。这些模态参数可以由计算或试验分析取得,这样一个计算或试验分析过程称为模态分析。通过试验将采集的系统输入与输出信号经过参数识别获得模态参数,称为试验模态分析。通常,模态分析都是指试验模态分析。振动模态是弹性结构的固有的、整体的特性。如果通过模态分析方法搞清楚了结构物在某一易受影响的频率范围内各阶主要模态的特性,就可能预言结构在此频段内在外部或内部各种振源作用下实际振动响应。因此,模态分析是结构动态设计及设备的故障诊断的重要方法。模态分析最终目标在是识别出系统的模态参数,为结构系统的振动特性分析、振动故障诊断和预报以及结构动力特性的优化设计提供依据。 试验模态分析主要有以下两种方法,OROS模态分析软件MODEL 2 完全具备了这两种常用的模态方 法。 锤击法模态测试 用于满足锤击法结构模态试验,以简明、直观的方法测量和处理输入力和响应数据,并显示结果。提供两种锤击方法:固定敲击点移动响应点和固定响应点移动敲击点。用力锤来激励结构,同时进行加速度和力信号的采集和处理,实时得到结构的传递函数矩阵。能够方便地设置测量参数,如触发量级、测量带宽和加窗类型,同时对最优的设置提供建议指导。 激振器法模态测试 主要是通过分析仪输出信号源来控制激振器,激励被测试件,输出信号有先进扫频正弦,随机噪声,正弦,调频脉冲等信号。支持单点激励(SIMO)与多点同时激励法(MIMO)。 1)几何建模 结构线架模型生成,节点数和部件数没有限制,测量点DOF自动加到通道标示;建立几何模型,以3维方式显示测量和分析结果。结构模型可以作为单个部件的装配,及采用不同的坐标系(直角、圆柱、球体坐标系),要求除点的定义外,还可定义线和面,真实的显示试验结构。结构线架模型生成,节点数和部件数没有限制,测量点自由度自动加到通道标示。
简谐振动特性研究实验
实验一、简谐振动特性研究与弹簧劲度系数测量【实验目的】 1. 胡克定律的验证与弹簧劲度系数的测量; 2. 测量弹簧的简谐振动周期,求得弹簧的劲度系数; 3. 测量两个不同弹簧的劲度系数,加深对弹簧的劲度系数与它的线径、外径关系的了解。 4. 了解并掌握集成霍耳开关传感器的基本工作原理和应用方法。 【实验原理】 1. 弹簧在外力作用下将产生形变(伸长或缩短)。在弹性限度内由胡克定律知:外力和它的变形量成正比,即: (1) (1)式中,为弹簧的劲度系数,它取决于弹簧的形状、材料的性质。通过测量和的对应关系,就可由(1)式推算出弹簧的劲度系数。 2. 将质量为的物体挂在垂直悬挂于固定支架上的弹簧的下端,构成一个弹簧振子,若物体在外力作用下(如用手下拉,或向上托)离开平衡位置少许,然后释放,则物体就在平衡点附近做简谐振动,其周期为: (2) 式中是待定系数,它的值近似为,可由实验测得,是弹簧本身的质量,而被称为弹簧的有效质量。通过测量弹簧振子的振动周期,就可由(2)式计算出弹簧的劲度系数。 3. 磁开关(磁场控制开关): 如图1所示,集成霍耳传感器是一种磁敏开关。在“1脚”和“2 脚”间加直流电压,“1脚”接电源正极、“2脚”接电源负极。当垂直于该传感器的磁感应强度大于某值时,该传感器处于“导通”状 态,这时处于“”脚和“”脚之间输出电压极小,近似为零,当磁感
强度小于某值时,输出电压等于“1脚”、“2脚”端所加的电源电压,利用集成霍耳开关这个特性,可以将传感器输出信号输入周期测定仪,测量物体转动的周期或物体移动所经时间。 【实验仪器】 FB737新型焦利氏秤实验仪1台,FB213A型数显计时计数毫秒仪 【实验步骤】 1. 用拉伸法测定弹簧劲度系数:(不使用毫秒仪) (1)按图2,调节底板的三个水平调节螺丝,使重锤尖端对准重锤基准的尖端。 (2)在主尺顶部安装弹簧,再依次挂入带配重的指针吊钩、砝码托盘,松开顶端挂钩锁紧螺钉,旋转顶端弹簧挂钩,使小指针正好轻轻靠在平面镜上(注意:力度要适当,若靠得太紧,可能会因摩擦太大带来附加的系统误差),以便准确读数。这时因初始砝码等已使弹簧被拉伸了一段距离。(可参考说明书中的装置图)
学习模态分析要掌握的的知识
模态分析中的几个基本概念 一、模态定义:物体按照某一阶固有频率振动时,物体上各个点偏离平衡位置的位移是满足一定的比例关系的,可以用一个向量表示。 模态分析一般是在振动领域应用,每个物体都具有自己的固有频率,在外力的激励作用下,物体会表现出不同的振动特性: 一阶模态是外力的激励频率与物体固有频率相等的时候出现的,此时物体的振动形态叫做一阶振型或主振型; 二阶模态是外力的激励频率是物体固有频率的两倍时候出现,此时的振动外形叫做二阶振型,以依次类推。 一般来讲,外界激励的频率非常复杂,物体在这种复杂的外界激励下的振动反应是各阶振型的复合。 二、模态分析:模态是结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。这些模态参数可以由计算或试验分析取得,这样一个计算或试验分析过程称为模态分析。 有限元中模态分析的本质是求矩阵的特征值问题,所以“阶数”就是指特征值的个数。将特征值从小到大排列就是阶次。 实际的分析对象是无限维的,所以其模态具有无穷阶。但是对于运动起主导作用的只是前面的几阶模态,所以计算时根据需要计算前几阶的。 一个物体有很多个固有振动频率(理论上无穷多个),按照从小到大顺序,第一个就叫第一阶固有频率,依次类推。所以模态的阶数就是对应的固有频率的阶数。 三、振型是指体系的一种固有的特性。它与固有频率相对应,即为对应固有频率体系自身振动的形态。每一阶固有频率都对应一种振型。振型与体系实际的振动形态不一定相同。振型对应于频率而言,一个固有频率对应于一个振型。按照频率从低到高的排列,来说第一振型,第二振型等等。此处的振型就是指在该固有频率下结构的振动形态,频率越高则振动周期越小。在实验中,我们就是通过用一定的频率对结构进行激振,观测相应点的位移状况,当观测点的位移达到最大时,此时频率即为固有频率。实际结构的振动形态并不是一个规则的形状,而是各阶振型相叠加的结果。 四、模态扩展是为了是结果在后处理器中观察而设置的,原因如下: 求解器的输出内容主要是固有频率,固有频率被写到输出文件Jobname.OUT及振型文件Jobnmae.MODE中,输出内容中也可以包含缩减
振动实验报告剖析
振动与控制系列实验 姓名:李方立 学号:201520000111 电子科技大学机械电子工程学院
实验1 简支梁强迫振动幅频特性和阻尼的测量 一、实验目的 1、学会测量单自由度系统强迫振动的幅频特性曲线。 2、学会根据幅频特性曲线确定系统的固有频率f 0和阻尼比。 二、实验装置框图 图3.1表示实验装置的框图 图3-1 实验装置框图 K C X 图3-2 单自由度系统力学模型 三、实验原理 单自由度系统的力学模型如图3-2所示。在正弦激振力的作用下系统作简谐强迫振动, 设激振力F 的幅值B 、圆频率ωo(频率f=ω/2π),系统的运动微分方程式为: 扫频信号源 动态分析仪 计算机系统及分析软件 打印机或 绘图仪 简支梁 振动传感器 激振器 力传感器 质量块 M
或 M F x dt dx dt x d M F x dt dx n dt x d F Kx dt dx C dt x d M /2/222 22 2 222=++=++=++ωξωω (3-1) 式中:ω—系统固有圆频率 ω =K/M n ---衰减系数 2n=C/M ξ---相对阻尼系数 ξ=n/ω F ——激振力 )2sin(sin 0ft B t B F πω== 方程①的特解,即强迫振动为: ) 2sin()sin(0?π?ω-=-=f A A x (3-2) 式中:A ——强迫振动振幅 ? --初相位 2 0222024)(/ωωωn M B A +-= (3-3) 式(3-3)叫做系统的幅频特性。将式(3-3)所表示的振动幅值与激振频率的关系用图形表示,称为幅频特性曲线(如图3-3所示): 3-2 单自由度系统力学模型 3-3 单自由度系统振动的幅频特性曲线 图3-3中,Amax 为系统共振时的振幅;f 0为系统固有频率,1f 、2f 为半功率点频率。 振幅为Amax 时的频率叫共振频率f 0。在有阻尼的情况下,共振频率为: 2 21ξ-=f f a (3-4) 当阻尼较小时,0f f a =故以固有频率0f 作为共振频率a f 。在小阻尼情况下可得 01 22f f f -= ξ (3-5) 1f 、2f 的确定如图3-3所示: M X C K
模态分析实验报告
模态分析实验报告 姓名: 学号: 任课教师: 实验时间: 指导老师: 实验地点:
实验1 传递函数的测量 一、实验内容 用锤击激振法测量传递函数。 二、实验目的 1)掌握锤击激振法测量传递函数的方法; 2)测量激励力和加速度响应的时间记录曲线、力的自功率谱和传递函数; 3)分析传递函数的各种显示形式(实部、虚部、幅值、对数、相位)及相干函 数; 4)比较原点传递函数和跨点传递函数的特征; 5)考察激励点和响应点互换对传递函数的影响; 6)比较不同材料的力锤锤帽对激励信号的影响; 三、实验仪器和测试系统 1、实验仪器 主要用到的实验仪器有:冲击力锤、加速度传感器,LMS LMS-SCADAS Ⅲ测试系统,具体型号和参数见表1-1。 仪器名称型号序列号灵敏度备注 数据采集和分析系统LMS-SCADAS Ⅲ比利时力锤2302-10 3164 2.25 mV/N 加速度传感器100 mV/g 丹麦B&K 表1-1 实验仪器 2 、测试系统 利用试验测量的激励信号(力锤激励信号)和响应的时间历程信号,运用数字信号处理技术获得频率响应函数(Frequency Response Function, FRF),得到系统的非参数模型。然后利用参数识别方法得到系统的模态参数。测试系统主要完成力锤激励信号及各点响应信号时间历程的同步采集,完成数字信号的处理和参数的识别。 测量分析系统的框图如图1-1所示。测量系统由振动加速度传感器、力锤和比利时LMS公司SCADAS采集前端及Modal Impact测量分析软件组成。力锤及加速度传感器通过信号线与SCADAS采集前端相连,振动传感器及力锤为ICP
压电陶瓷振动的干涉测量实验报告
一、实验目 压电陶瓷振动的干涉测量实验报告 的与实验仪 器 1.实验目的 (1)了解压电陶瓷的性能参数;? (2)了解电容测微仪的工作原理,掌握电容测微仪的标定方法; ? (3)、掌握压电陶瓷微位移测量方法。 2.实验仪器 压电陶瓷材料(一端装有激光反射镜,可在迈克尔逊干涉仪中充当反射镜)、光学防震平台、半导体激光器、双踪示波器、分束镜、反射镜、二维可调扩束镜、白屏、驱动电源、光电探头、信号线等。 二、实验原理 1. 压电效应 压电陶瓷是一种多晶体,它的压电性可由晶体的压电性来解释。晶体在机械力作用下,总的电偶极矩(极化)发生变化,从而呈现压电现象,因此压电陶瓷的压电性与极化、形变等有密切关系。 1) 正压电效应:压电晶体在外力作用下发生形变时,正、负电荷中心发生相对位移,在某些相对应的面上产生异号电荷,出现极化强度。对于各向异性晶体,对晶体施加应力时,晶体将在 X,Y,Z 三个方向出现与应力成正比的极化强度,即: E = g·T(g为压电应力常数), 2) 逆压电效应:当给压电晶体施加一电场 E 时,不仅产生了极化,同时还产生形变,这种由电场产生形变的现象称为逆压电效应,又称电致伸缩效
应。这是由于晶体受电场作用时,在晶体内部产生了应力(压电应力),通过应力作用产生压电应变。存在如下关系: S = d·U(d为压电应变常数) 对于正和逆压电效应来讲, g和d 在数值上是相同的。 2. 迈克耳逊干涉仪的应用 迈克耳逊干涉仪可以测量微小长度。上图是迈克耳逊干涉仪的原理图。分光镜的第二表面上涂有半透射膜,能将入射光分成两束,一束透射,一束反射。分光镜与光束中心线成 45°倾斜角。M1和 M2为互相垂直并与分束镜都成 45°角的平面反射镜,其中反射镜 M1后附有压电陶瓷材料。 由激光器发出的光经分光镜后,光束被分成两路,反射光射向反射镜 M1(附压电陶瓷),透射光射向测量镜 M2(固定),两路光分别经 M1、M2反射后,分别经分光镜反射和透射后又会合,经扩束镜到达白屏,产生干涉条纹。M1和 M2与分光镜中心的距离差决定两束光的光程差。因而通过给压电陶瓷加电压使 M1随之振动,干涉条纹就发生变化。由于干涉条纹变化一级,相当于测量镜 M1移动了λ/2,所以通过测出条纹的变化数就可计算出压电陶瓷的伸缩量。 三、实验步骤 1)将驱动电源分别与光探头,压电陶瓷附件和示波器相连,其中压电陶瓷 附件接驱动电压插口,光电探头接光探头插口,驱动电压波形和光探头波形插口分别接入示波器 CH1 和 CH2; 2)在光学实验平台上搭制迈克尔逊干涉光路,使入射激光和分光镜成 45 度,反射镜 M1 和 M2与光垂直,M1 和 M2 与分光镜距离基本相等;
模态分析实验报告
研究生学院 机械工程专业硕士结课作业 课程题目:机械结构模态分析实验 指导老师: 姓名: 学号: 2015年08月23日
一、概述 模态分析是研究结构动力特性一种近代方法,是系统辨别方法在工程振动领域中的应用。模态是机械结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。这些模态参数可以由计算或试验分析取得,这样一个计算或试验分析过程称为模态分析。这个分析过程如果是由有限元计算的方法取得的,则称为计算模态分析;如果通过试验将采集的系统输入与输出信号经过参数识别获得模态参数,称为试验模态分析。通常,模态分析都是指试验模态分析。 振动模态是弹性结构固有的、整体的特性。通过模态分析方法搞清楚了结构物在某一易受影响的频率范围内的各阶主要模态的特性,就可以预言结构在此频段内在外部或内部各种振源作用下产生的实际振动响应。因此,模态分析是结构动态设计及设备故障诊断的重要方法。 机器、建筑物、航天航空飞行器、船舶、汽车等的实际振动模态各不相同。模态分析提供了研究各类振动特性的一条有效途径。首先,将结构物在静止状态下进行人为激振,通过测量激振力与响应并进行双通道快速傅里叶变换(FFT)分析,得到任意两点之间的机械导纳函数(传递函数)。用模态分析理论通过对试验导纳函数的曲线拟合,识别出结构物的模态参数,从而建立起结构物的模态模型。根据模态叠加原理,在已知各种载荷时间历程的情况下,就可以预言结构物的实际振动的响应历程或响应谱。 模态分析的经典定义:将线性定常系统振动微分方程组中的物理坐标变换为模态坐标,使方程组解耦,成为一组以模态坐标及模态参数描述的独立方程,以便求出系统的模态参数。坐标变换的变换矩阵为模态矩阵,其每列为模态振型。模态分析的最终目标是识别出系统的模态参数,为结构系统的振动特性分析、振动故障诊断和预报以及结构动力特性的优化设计提供依据。 模态分析技术的应用可归结为以下几个方面: 1) 评价现有结构系统的动态特性; 2) 在新产品设计中进行结构动态特性的预估和优化设计; 3) 诊断及预报结构系统的故障; 4) 控制结构的辐射噪声; 5) 识别结构系统的载荷 二、实验的基本过程 1、动态数据的采集及频响函数或脉冲响应函数分析 (1)激励方法。试验模态分析是人为地对结构物施加一定动态激励,采集各点的振动响应信号及激振力信号,根据力及响应信号,用各种参数识别方法获取模态参数。激励方法不同,相应识别方法也不同。目前主要由单输入单输出(SISO)、单输入多输出(SIMO)多输入多输出(MIMO)三种方法。以输入力的信号特征还可分为正弦慢扫描、正弦快扫描、稳态随机(包括白噪声、宽带噪声或伪随机)、瞬态激励(包括随机脉冲激励)等。 (2)数据采集。SISO方法要求同时高速采集输入与输出两个点的信号,用不断移动激励点位置或响应点位置的办法取得振形数据。SIMO及MIMO的方法则要求大量通道数据的高速并行采集,因此要求大量的振动测量传感器或激振器,试验成本较高。 (3)时域或频域信号处理。例如谱分析、传递函数估计、脉冲响应测量以及滤波、相关分析等。
各种模态分析方法总结及比较
各种模态分析方法总结与比较 一、模态分析 模态分析是计算或试验分析固有频率、阻尼比和模态振型这些模态参数的过程。 模态分析的理论经典定义:将线性定常系统振动微分方程组中的物理坐标变换为模态坐标,使方程组解耦,成为一组以模态坐标及模态参数描述的独立方程,以便求出系统的模态参数。坐标变换的变换矩阵为模态矩阵,其每列为模态振型。 模态分析是研究结构动力特性一种近代方法,是系统辨别方法在工程振动领域中的应用。模态是机械结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。这些模态参数可以由计算或试验分析取得,这样一个计算或试验分析过程称为模态分析。这个分析过程如果是由有限元计算的方法取得的,则称为计算模记分析;如果通过试验将采集的系统输入与输出信号经过参数识别获得模态参数,称为试验模态分析。通常,模态分析都是指试验模态分析。振动模态是弹性结构的固有的、整体的特性。如果通过模态分析方法搞清楚了结构物在某一易受影响的频率范围内各阶主要模态的特性,就可能预言结构在此频段内在外部或内部各种振源作用下实际振动响应。因此,模态分析是结构动态设计及设备的故障诊断的重要方法。 模态分析最终目标是在识别出系统的模态参数,为结构系统的振动特性分析、振动故障诊断和预报以及结构动力特性的优化设计提供依据。二、各模态分析方法的总结
(一)单自由度法 一般来说,一个系统的动态响应是它的若干阶模态振型的叠加。但是如果假定在给定的频带内只有一个模态是重要的,那么该模态的参数可以单独确定。以这个假定为根据的模态参数识别方法叫做单自由度(SDOF)法n1。在给定的频带范围内,结构的动态特性的时域表达表示近似为: ()[]}{}{T R R t r Q e t h r ψψλ= 2-1 而频域表示则近似为: ()[]}}{ {()[]2ωλωψψωLR UR j Q j h r t r r r -+-= 2-2 单自由度系统是一种很快速的方法,几乎不需要什么计算时间和计算机内存。 这种单自由度的假定只有当系统的各阶模态能够很好解耦时才是正确的。然而实际情况通常并不是这样的,所以就需要用包含若干模态的模型对测得的数据进行近似,同时识别这些参数的模态,就是所谓的多自由度(MDOF)法。 单自由度算法运算速度很快,几乎不需要什么计算和计算机内存,因此在当前小型二通道或四通道傅立叶分析仪中,都把这种方法做成内置选项。然而随着计算机的发展,内存不断扩大,计算速度越来越快,在大多数实际应用中,单自由度方法已经让位给更加复杂的多自由度方法。 1、峰值检测 峰值检测是一种单自由度方法,它是频域中的模态模型为根据对系统极点进行局部估计(固有频率和阻尼)。峰值检测方法基于这样的事实:在固有频率附近,频响函数通过自己的极值,此时其实部为零(同相部分最
最新模态试验及分析的基本步骤
模态试验及分析的基本步骤 1 1.动态数据的采集及响应函数分析 2 首先应选取适当的激励方式。激励方式可以是正弦、随机或瞬态中的任何一种。激3 励方式不同,相应的模态参数识别方法也不同。目前主要有单输入单输出、单输入多4 输出和多输入多输出三种方法。然后进行数据采集。对于单输入单输出方法要求同时5 高速采集输入与输出两个点的信号,用不断移动激励点位置或响应点位置的办法取得6 振型数据;单输入多输出及多输入多输出的方法要求大量通道数据的高速采集,因此要7 求大量的振动测量传感器或激振器,试验成本极高。在采集信号数据以后,还要在时8 域或频域对信号进行处理,例如谱分析、传递函数估计、脉冲响应测量以及滤波、相9 关分析等。 10 2.建立结构数学模型 11 根据己知条件,建立一种描述结构状态及特性的模型,作为计算及参数识别的依 12 据,目前一般假定系统为线性的。由于采用的识别方法不同,数学建模可分为频域建13 模和时域建模。根据阻尼特性及频率藕合程度又可分为实模态和复模态等。 14 3.参数识别 15 按识别域的不同可分为频域法、时域法和混合域法。激励方式不同,相应的识别参16 数方法也不尽相同。并非越复杂的方法识别的结果越可靠。对于目前能够进行的大多17 数不是十分复杂的结构,只要取得了可靠的频响数据,用简单的识别方法也可能获得18 良好的模态参数;反之,即使用最复杂的数学模型、最高级的拟合方法,如果频响测量19 数据不可靠,识别的结果也不会理想。 20 4.振型动画 21 参数识别的结果得到了结构的模态参数模型,即一组固有频率、模态阻尼以及相应22 各阶模态的振型。但是由于结构复杂,由许多自由度组成的振型的数组难以引起对振23
发动机振动特性分析与试验
发动机振动特性分析与试验 作者:长安汽车工程研究院来源:AI汽车制造业 完善的项目前期工作预示着更少的项目后期风险,这也是CAE工作的重要意义之一。在整机开发的前期(概念设计和布置设计阶段),由于没有成熟样机进行NVH试验,很难通过试验的方法预测产品的NVH水平。因此,通过仿真的方法对整机NVH性能进行分析甚至优化显得十分重要。 众所周知,发动机NVH是个复杂的概念,包括发动机的振动、噪声以及个体对振动和噪声的主观评价等。客观地说,噪声与振动也相互联系,因为发动机一部分噪声由结构表面振动直接辐射,另一部分由发动机燃烧和进排气通过空气传播。除此之外,发动机附件(如风扇)也存在噪声贡献。本文仅考虑发动机结构振动问题,即在主轴承载荷、燃烧爆发压力和运动件惯性力的作用下,对发动机结构振动进行分析以及与试验的对比。发动机结构噪声的激励源主要包括燃烧爆发压力、气门冲击、活塞敲击、主轴承冲击、前端齿轮/链驱动和变速器激励等,这些结构振动又通过缸盖罩、缸盖、缸体和油底壳等传出噪声。 发动机结构振动分析方法简介 图1 发动机结构振动分析方法 如图1所示,发动机结构噪声分析方法包括以下几个步骤: 1. 动力总成FE建模及模态校核 建立完整的短发动机和变速器装配的有限元模型;对该有限元模型进行模态分析,通过分析结果判断各零件间连接是否完好;通过分析结果判断动力总成整体模态所在频率范围是否合理,零部件的局部模态频率是否合理,若存在整体或局部模态不合理的情况,需要对结构进行初步更改或优化。
2. 动力总成模态压缩 缩减有限元模型,得到动力总成的刚度、质量、几何以及自由度信息,用于多体动力学分析。 3. 运动件简化模型建立 发动机中的部分动件不用进行有限元建模,可作简化处理,形成梁-质量点模型,用于多体动力学分析。其中包括:活塞组、连杆组和曲轴及其前后端。 4. 动力总成多体动力学分析 在定义了动力总成各零部件间连接并且已知各种载荷的情况下,对动力总成进行时域下的多体动力学分析,并对得到的发动机时域和频域下的动态特性进行评判,同时,其输出用于结构振动分析。 5. 动力总成结构振动分析 基于多体动力学分析结果,对整个动力总成有限元模型进行强迫振动分析,得到发动机本体、变速器以及各种外围件的表面振动特性,进行评判和结构优化。 实例分析 1. 分析对象 以一款成熟的直列四缸1.5L发动机为平台,针对其结构振动问题,对其进行结构振动CAE 分析,并与其台架试验结果相比较。发动机的部分参数如下:缸径75mm,冲程85mm,缸间距84mm,最大缸压6MPa。 2. 坐标定义 为了便于以后叙述,对动力总成进行了坐标定义(见图2)。
机床实验模态分析综述
机床的模态分析方法综述 甄真 (北京信息科技大学机电工程学院,北京100192) 摘要:模态分析是研究机械结构动力特性的一种近代方法,是结构动态设计及设备的故障诊断的重要方法。机床在工作时,由于要承受各种变载荷而产生振动,其精度和寿命会受到影响。因此有必要对机床进行模态分析,了解其动态特性,以便进一步分析和改进。本文概述了模态分析的概念、研究意义及发展历史,介绍了机床模态分析的研究现状, 从理论方法与试验方法两方面指出了其关键技术以及研究发展方向。 关键词:模态分析;动态特性;机床;理论方法;实验方法 Summary of the model analysis method of machine tool ZHEN Zhen (Beijing Information Science & Technology University, Mechanical and Electrical Engineering College, Beijing, 100192) Abstract:Modal analysis is a modern method to study the dynamic characteristics of mechanical structure. It’s an important method in structure dynamic design and fault diagnosis of equipment.Its accuracy and lifetime will be affected due to withstand all kinds of variable load and vibration when the machine tool works.So it is necessary to make modal analysis and to understand the dynamic characteristics for machine tool in order to further analyze and improve. This paper summarizes the concept, significance and history of modal analysis and introduces the research status of model analysis of machine tool. It also points out the key technology and research direction in this field from two aspects of theoretical method and experimental method. Key words:model analysis; dynamic characteristics; machine tool; theoretical method; experimental method 0 引言 模态是指机械结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。模态分析是一种研究机械结构动力的方法,是系统辨别方法在工程振动领域中的应用。振动模态是弹性结构的固有的、整体的特性。如果通过模态分析法搞清楚了结构物在某一个易受影响的频率范围内各阶主要模态的特性,就可预言结构在此频段内在外部或内部各种振源作用下实际响应。因此,模态分析是结构动态设计及设备的故障诊断的重要方法[1]。 模态分析将构件的复杂振动分解为许多简单而独立的振动,并用一系列模态参数来表征的过程。根据线性叠加原理,一个构件的复杂振动是由无数阶模态叠加的结果。在这些模态中。模态分析最终目标是识别出系统的模态参数,为结构系统的振动特性分析、振动故障诊断和预报以及结构动力特性的优化设计提供依据。模态分析主要分为3类方法:一是,基于计算机仿真的有限元分析法;二是,基于输入(激励)输出(响应)模态试验的试验模态分析法;三是,基于仅有输出(响应)模态试验的运行模态分析法。有限元分析属结构动力学正问题,但受无法准确描述复杂边界条件、结构物理参数和部件连接状态等不确定性因素的限制难以达到很高的精度。第二、三类方法属结构动力学反问题,基于真实结构的模态试验。因而能得到更准确
简支梁振动系统动态特性综合测试方法分析
目录 一、设计题目 (1) 二、设计任务 (1) 三、所需器材 (1) 四、动态特性测量 (1) 1.振动系统固有频率的测量 (1) 2.测量并验证位移、速度、加速度之间的关系 (3) 3.系统强迫振动固有频率和阻尼的测量 (6) 4.系统自由衰减振动及固有频率和阻尼比的测量 (6) 5.主动隔振的测量 (9) 6.被动隔振的测量 (13) 7.复式动力吸振器吸振实验 (18) 五、心得体会 (21) 六、参考文献 (21)
一、设计题目 简支梁振动系统动态特性综合测试方法。 二、设计任务 1.振动系统固有频率的测量。 2.测量并验证位移、速度、加速度之间的关系。 3.系统强迫振动固有频率和阻尼的测量。 4.系统自由衰减振动及固有频率和阻尼比的测量。 5.主动隔振的测量。 6.被动隔振的测量。 7.复式动力吸振器吸振实验。 三、所需器材 振动实验台、激振器、加速度传感器、速度传感器、位移传感器、力传感器、扫描信号源、动态分析仪、力锤、质量块、可调速电机、空气阻尼器、复式吸振器。 四、动态特性测量 1.振动系统固有频率的测量 (1)实验装置框图:见(图1-1) (2)实验原理: 对于振动系统测定其固有频率,常用简谐力激振,引起系统共振,从而找到系统的各阶固有频率。在激振功率输出不变的情况下,由低到高调节激振器的激振频率,通过振动曲线,我们可以观察到在某一频率下,任一振动量(位移、速度、加速度)幅值迅速增加,这就是机械振动系统的某阶固有
频率。 (图1-1实验装置图) (3)实验方法: ①安装仪器 把接触式激振器安装在支架上,调节激振器高度,让接触头对简支梁产生一定的预压力,使激振杆上的红线与激振器端面平齐为宜,把激振器的信号输入端用连接线接到DH1301扫频信号源的输出接口上。把加速度传感器粘贴在简支梁上,输出信号接到数采分析仪的振动测试通道。 ②开机 打开仪器电源,进入DAS2003数采分析软件,设置采样率,连续采集,输入传感器灵敏度、设置量程范围,在打开的窗口内选择接入信号的测量通道。清零后开始采集数据。 ③测量 打开DH1301扫频信号源的电源开关,调节输出电压,注意不要过载,手动调节输出信号的频率,从0开始调节,当简支梁产生振动,且振动量最大时(共振),保持该频率一段时间,记录下此时信号源显示的频率,即为简支梁振动固有频率。继续增大频率可得到高阶振动频率。
晶钻模态分析软件系列三锤击法模态实验
锤击法是单操作员实验模态测试的基本方法。EDM-Modal 的锤击法提供流程化的操作界面,方便用户完成所有设置和实验。 锤击法模态实验的设计,旨在帮助用户快速定义采集参数,将更多的时间可以花在分析上。触发设置界面让用户定义触发方式,触发预览界面显示当前激励和响应的测点名称,触发后采集的激励和响应波形,以及平均的次数;其窗口的尺寸大小可手动调整。手动触发是默认的触发类型,在些类型下当激励达到设置触发值,则激励和响应波形会被显示,用户可以接受/拒绝当前帧。 当选择接受则进行下一帧测试,直到达到平均次数,完成当前测点的测试。驱动点选择是锤击法特有的一个功能子模块,用于方便用户选择哪个测点适合用作固定的激励点或参考点。用户设置几个要测试的驱动点,通过试敲击得到他们的FRF数据,然后判断出最适合的驱动点。EDM简化了此重要的预实验的数据管理。 当开始实际的测量后,采集状态表格会显示所有的DOFs状态(状态包括:未测量,已测量和正在测量),方便用户即时了解所有测点的状态。当测点完成后点“Next Point”或“Previous Point”移动软件上的当前测点。“Roving
Setup”,可集中设置游击方式,每个通道对应的测点和方向。 锤击法实验过程一个常见的问题是会出现“double hit”。我们提供了自动检测“double hit”的过程,让用户自动或手动拒绝有双击的敲击。锤击法实验采集的结果会自动添加到模态分析的数据选择模块,这样模态数据采集和分析可无缝对接。 ★EDM Modal 锤击法模态实验主要特征如下: ①直观的流程化操作过程。 ②几何模型贯穿整个测试过程。 ③响应和激励两种游击方式。 ④自动或手动移动测点。 ⑤自动或手动触发模式。 ⑥可变尺寸的触发观览窗口。 ⑦双击锤击识别,开/关,自动/手动拒绝。 ⑧驱动点设置。 ⑨测试状态声音和图形反馈H1,H2,H3和Hv方式计算FRF 测点测试状态显示表格。 ★EDM Modal模态支持的功能如下: ①几何模型的创建/编辑/导入/导出/动画。 ②工作变形分析(ODS) ③锤击法模态实验 ④SIMO与MIMO FRF模态测试 ⑤SIMO正弦扫频模态测试