计算机控制系统技术作业(中文翻译)
计算机控制系统课后习题答案
1-1 什么是计算机控制系统?画出一个实际计算机控制系统原理结构图,并说明一个计算机控制系统由哪些部分组成及各部分的作用。
利用计算机参与控制的系统称为计算机控制系统。
1-2 简述计算机控制系统的控制过程。
实时数据采样实时计算控制量实时控制实时管理1-3 实时、在线方式和离线方式的含义是什么?(1)实时:所谓“实时”,是指信号的输入、计算和输出都是在一定时间范围内完成的,超出了这个时间就会失去控制时机,控制也就失去了意义。
(2)“在线”方式:生产过程和计算机系统直接连接,并接受计算机直接控制的方式称为在线或联机方式。
(3)“离线”方式:若生产过程设备不直接与计算机相连接,其工作不直接受计算机的控制的方式叫做“脱机”方式或“离线”方式。
1-4 计算机控制系统的硬件由哪几部分组成?各部分的作用是什么?主机:这是微型计算机控制系统的核心,通过接口它可以向系统的各个部分发出各种命令,同时对被控对象的被控参数进行实时检测及处理。
输入输出通道:这是微机和生产对象之间进行信息交换的桥梁和纽带。
(3)外部设备:这是实现微机和外界进行信息交换的设备,简称外设,包括人机联系设备(操作台)、输入输出设备(磁盘驱动器、键盘、打印机、显示终端等)和外存贮器(磁盘)。
(4)生产过程装置a.测量变送单元:为了测量各种参数而采用的相应检测元件及变送器。
b.执行机构:要控制生产过程,必须有执行机构。
1.5 计算机控制系统的软件由哪几部分组成?各部分的作用是什么?就功能来分,软件可分为系统软件、应用软件及数据库。
系统软件:它是由计算机设计者提供的专门用来使用和管理计算机的程序。
系统软件包括:a.操作系统:即为管理程序、磁盘操作系统程序、监控程序等;b.诊断系统:指的是调节程序及故障诊断程序;c.开发系统:包括各种程序设计语言、语言处理程序(编译程序)、服务程序(装配程序和编辑程序)、模拟主系统(系统模拟、仿真、移植软件)、数据管理系统等;d.信息处理:指文字翻译、企业管理等。
计算机控制系统课后答案

计算机控制系统课后答案1. 概述计算机控制系统是指利用计算机进行控制的系统,它采用计算机硬件和软件的协同作用,对被控对象进行监测、测量、判断以及控制操作的任务。
本文将回答计算机控制系统课后习题,以帮助读者加深对该课程的理解。
2. 习题答案2.1 什么是计算机控制系统?计算机控制系统是指利用计算机硬件和软件的协同作用,对被控对象进行监测、测量、判断以及控制操作的系统。
其核心是计算机的控制程序,通过对输入信号的处理和对输出信号的控制,实现对被控对象的精准控制。
2.2 计算机控制系统的组成计算机控制系统主要由以下几个组成部分构成:•输入设备:用于采集被控对象的状态信息,将其转化为数字信号输入到计算机中。
•输出设备:将计算机产生的控制信号转化为可被被控对象接受的信号。
•中央处理单元(CPU):负责执行控制程序,对输入信号进行处理和判断,并产生相应的控制信号。
•存储器:用于存储控制程序和控制数据。
•总线:用于传输控制信号和数据,连接CPU、存储器和输入输出设备。
2.3 计算机控制系统的特点•精确性:计算机控制系统能够对被控对象进行精确的控制,实时调整控制参数,确保控制过程的稳定性和准确性。
•灵活性:通过编写不同的控制程序,可以实现对不同对象的控制,具有很高的灵活性。
•可靠性:计算机控制系统具有自主诊断和故障处理能力,当出现故障时,能够自动检测、定位和修复错误,提高了系统的可靠性。
•扩展性:计算机控制系统可以根据需要增加或替换硬件设备,增加系统的功能和性能。
•可维护性:计算机控制系统通常使用模块化设计,方便对系统进行维护和升级。
2.4 计算机控制系统的应用领域计算机控制系统广泛应用于工业自动化领域,例如:•工业生产线控制:计算机控制系统可以对生产线上的各个环节进行监控和控制,提高生产效率和产品质量。
•交通信号控制:计算机控制系统可以对交通信号灯进行精确控制,实现交通流量的调度和优化。
•智能家居系统:计算机控制系统可以对家庭设备进行智能控制,实现远程操控和自动化管理。
计算机控制系统课后答案,李华
计算机控制系统课后答案1. 介绍本文是针对计算机控制系统课后作业的答案汇总。
在课程中涉及到的问题和概念将会一一解答和说明,帮助读者更好地理解和掌握计算机控制系统。
2. 问题解答2.1 列举计算机控制系统的应用领域。
计算机控制系统广泛应用于以下领域:- 工业自动化控制:用于控制工业生产线上的各种设备和工艺过程。
- 交通运输系统:包括地铁、公交、航空、航天等领域的运输工具的控制。
- 农业自动化:应用于农业机械和设备的控制,提高农业生产效率。
- 医疗设备控制:用于医疗设备的自动控制和监测。
- 建筑智能化:用于建筑内部的照明、供暖、空调等控制系统。
- 安防、监控系统:包括视频监控、入侵报警等各种安全系统的控制。
2.2 计算机控制系统的组成结构是什么?计算机控制系统的基本组成结构包括: - 传感器:用于将被控制对象的状态转换为电信号,并输入到控制系统中。
- 执行器:根据控制系统的指令,执行相应的动作,控制被控制对象。
- 控制器:对传感器采集到的数据进行处理和分析,并产生相应的控制指令。
- 通信网络:用于传输控制指令和传感器数据的通信网络。
- 计算机:负责控制器的运行和算法的执行,对控制系统进行监控和管理。
2.3 什么是开环控制系统和闭环控制系统?它们的区别是什么?开环控制系统是指控制器只根据预先设置的控制指令,对被控制对象进行控制,而不对被控制对象的输出进行测量和反馈。
因此,开环控制系统的控制效果受到外界扰动和被控制对象本身性能变化的影响。
闭环控制系统是指控制器在对被控制对象进行控制的同时,通过测量被控制对象的输出信号,并与设定值进行比较,产生反馈信号进行控制调节。
闭环控制系统能够根据被控制对象实际输出的变化来调整控制指令,使控制效果更加稳定和准确。
区别: - 开环控制系统没有反馈环路,只根据预先设置的控制指令对被控制对象进行控制;闭环控制系统设有反馈环路,通过测量被控制对象的输出进行调节。
计算机控制作业及答案

用部分作分部组成的?各制计算机控系统是由哪级硬件组成:微控制器或微处理器、ROM、RAM、外部设备、网络通信接口、实时时钟、电源。
软件组成:系统软件和应用软件。
作用:硬件中有A/D称为模拟数字转换器,它包括采样保持和量化,其输出为数字形式,何时采样由计算机控制。
D/A称为数字模拟转换器,它是将数字信号转换成模拟信号形成控制量。
应用软件根据要解决的问题而编写的各种程序,系统软件包括操作系统,开发系统。
为适应控制现场的工作环境,对工业控制机有何要求?1.2.)扩展性)实时性(4)适应性(2)可靠性(3(1)基于嵌入式系统的结构2)基于通用计算机的结构(结构:(11.3. PCI总线,CPCI总线,PC/104总线以及RS232,RS422,RS485有何特点,电平特性,适用场合? IO接口?何谓2.1.IO接口?在计算机控制系统中为什么要有和外围设备之间的时序配合和通信联络问题CPU1()解决主机和外围设备之间的数据格式转换和匹配问题CPU2)解决(的负载能力和外围设备端口的选择问题CPU3()解决 2.2.计算机与外围设备交互信息有哪几种控制方式?各有何优缺点?)并行通信。
优点:传送速度快、信息率高。
缺点:传输线多,成本高1(.RS-485)串行通信。
全双工方式2 RS-422 ,RS-232。
半双工方式()同步通信。
要求收发双方具有同频同相的同步时钟信号,每帧信息开始加特定的同3 (步字符,不允许有间隙。
开始位,停止位,发送的字符间允许有间隙4)异步通信( 2.3.模拟输入通道中为何要加采样保持器,采样保持器的组成及要求是什么?转换期间保持输入模拟信号不变)用采样保持电路使得在A/D(1转换器完成一次模拟量到数字量转换所需要的时间。
)孔径时间:AD(2的变化所引起的误差称为孔径误内,由于输入信号x(t) 孔径误差:在孔径时间ta/dδ。
差芯片为例:10的位ADC 以ta/d=10μs的转换精度为保证不低于0.1%转换精度如何计算?位的ADC的主要性能指标有哪些?10V8转换的方(6). A/D(5). (4). 误差和精度转换速率(3). (1). 接口特性(2). 量程分辨率法)(0.4%转换精度。
计算机控制系统作业参考答案
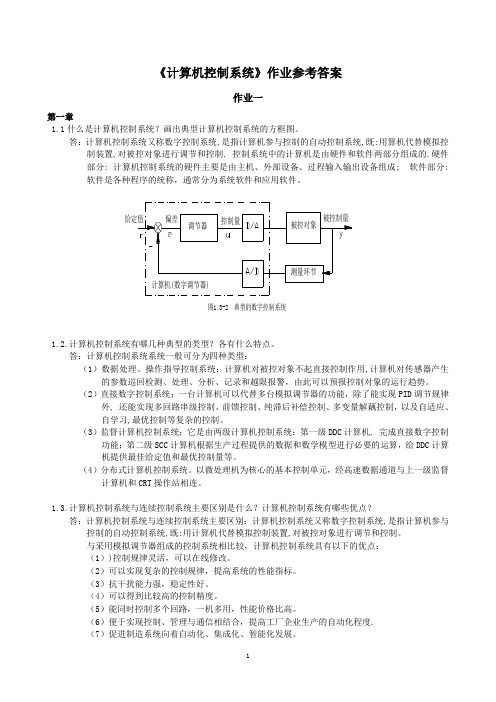
《计算机控制系统》作业参考答案作业一第一章1.1什么是计算机控制系统?画出典型计算机控制系统的方框图。
答:计算机控制系统又称数字控制系统,是指计算机参与控制的自动控制系统,既:用算机代替模拟控制装置,对被控对象进行调节和控制. 控制系统中的计算机是由硬件和软件两部分组成的.硬件部分: 计算机控制系统的硬件主要是由主机、外部设备、过程输入输出设备组成; 软件部分: 软件是各种程序的统称,通常分为系统软件和应用软件。
图1.3-2 典型的数字控制系统1.2.计算机控制系统有哪几种典型的类型?各有什么特点。
答:计算机控制系统系统一般可分为四种类型:(1)数据处理、操作指导控制系统;计算机对被控对象不起直接控制作用,计算机对传感器产生的参数巡回检测、处理、分析、记录和越限报警,由此可以预报控制对象的运行趋势。
(2)直接数字控制系统;一台计算机可以代替多台模拟调节器的功能,除了能实现PID调节规律外, 还能实现多回路串级控制、前馈控制、纯滞后补偿控制、多变量解藕控制,以及自适应、自学习,最优控制等复杂的控制。
(3)监督计算机控制系统;它是由两级计算机控制系统:第一级DDC计算机, 完成直接数字控制功能;第二级SCC计算机根据生产过程提供的数据和数学模型进行必要的运算,给DDC计算机提供最佳给定值和最优控制量等。
(4)分布式计算机控制系统。
以微处理机为核心的基本控制单元,经高速数据通道与上一级监督计算机和CRT操作站相连。
1.3.计算机控制系统与连续控制系统主要区别是什么?计算机控制系统有哪些优点?答:计算机控制系统与连续控制系统主要区别:计算机控制系统又称数字控制系统,是指计算机参与控制的自动控制系统,既:用计算机代替模拟控制装置,对被控对象进行调节和控制。
与采用模拟调节器组成的控制系统相比较,计算机控制系统具有以下的优点:(1))控制规律灵活,可以在线修改。
(2)可以实现复杂的控制规律,提高系统的性能指标。
PLC技术中英文翻译可编程控制器技术(英语原文中文翻译)
l 中文翻译可编程控制器技术随着时代的发展当今的技术也日趋完善、竞争愈演愈烈单靠人工的操作已不能满足于目前的制造业前景也无法保证更高质量的要求和高新技术企业的形象.人们在生产实践中看到自动化给人们带来了极大的便利和产品质量上的保证同时也减轻了人员的劳动强度减少了人员上的编制.在许多复杂的生产过程中难以实现的目标控制、整体优化、最佳决策等熟练的操作工、技术人员或专家、管理者却能够容易判断和操作可以获得满意的效果.人工智能的研究目标正是利用计算机来实现、模拟这些智能行为通过人脑与计算机协调工作以人机结合的模式为解决十分复杂的问题寻找最佳的途径我们在各种场合看到了继电器连接的控制,那已经是时代的过去,如今的继电器只能作为低端的基层控制模块或者简单的设备中使用到;而 PLC的出现也成为了划时代的主题,通过极其稳定的硬件穿插灵活的软件控制,使得自动化走向了新的高潮。
PLC的最大特点在于:电气工程师已不再电气的硬件上花费太多的心计,只要将按钮开关或感应器的输入点连接到 PLC的输入点上就能解决问题,通过输出点连接接触器或继电器来控制大功率的启动设备,而小功率的输出设备直接连接就可以。
PLC 的内部包含了具有中央处理器的CPU,并带有外部 I/O 口扩展的 I/O 接口地址和存储器三大块组成,CPU的核心是由一个或者多个累加器组成,它们具有逻辑的数学运算能力,并能读取程序存储器的内容通过计算后去驱动相应的存储器和 I/O 接口;I/O口将内部累加器和外部的输入和输出系统连接起来,并将相关的数据存入程序存储器或者数据存储器中;存储器可以将 I/O口输入的数据存入存储器中,并在工作时调转到累加器和 I/O接口上,存储器分程序存储器 lROM 和数据存储器 RAMROM可以将数据永久的存入存储器中,而 RAM 只能作为 CPU计算时临时计算使用的缓冲空间。
PLC的抗干扰是极其优秀的,我们根本不用去关心它的使用寿命和工作场合的恶劣,这些所有的问题已不再成为我们失败的主题,而留给我们的是关心如何来利用 PLC 的内部资源为我们加强设备的控制能力,使我们的设备更加的柔性。
计算机网络中英文互译
计算机网络中英翻译ACK (ACKnowledgement) 确认帧ADSL (Asymmetric Digital Subscriber Line) 非对称数字用户线AN (Access Network )接入网ANSI (American National Standards Institute) 美国国家标准协会AP (Access Point) 接入点API (Application Programming Interface) 应用编程接口APNIC (Asia Pacific Network Information Center) 亚太网络信息中心ARP ( Address Resolution Protocol )地址解析协议ARPA (Advanced Research Project Agency)美国国防部远景研究规划局(高级研究计划署)ARQ (Automatic Repeat reQuest) 自动请求重发ATM (Asynchronous Transfer Mode) 异步传递方式ATU (Access Termination Unit) 接入端接单元ATU-C (Access Termination Unit Central Office )端局接入端接单元ATU-R (Access Termination Unit Remote) 远端接入端接单元AUI (Attachment Unit Interface )连接接口单元AWT ( Abstract Window Toolkit )抽象窗口工具箱BECN (Backward Explicit Congestion Notification) 反向显式拥塞通知BER (Basic Encoding Rule) 基本编码规则BGP (Border Gateway Protocol) 边界网关协议BSA (Basic Service Area) 基本服务区BSS (Basic Service Set) 基本服务集BNA 宝来网络体系结构CAC (Connection Admission Control) 连接准许控制CAP (Carrierless Amplitude Phase) 无载波振幅相位调制CATV (Community Antenna TV, CAble TV) 有线电视CBR ( Constant Bit Rate )恒定比特率CCIR (Consultative Committee,International Radio) 国际无线电咨询委员会CCITT (Consultative Committee, International Telegraph and Telephone)国际电报电话咨询委员会CCP 通信控制处理机CDM (Code Division Multiplexing) 码分复用CDMA (Code Division Multiplex Access) 码分多址CNNIC (Network Information Center of China) 中国互联网络信息中心CRC (Cyclic Redundancy Check) 循环冗余检验CSMA/CD (Carrier Sense Multiple Access / Collision Detection)载波监听多点接入/碰撞检测CSU/DSU ( Channel Service Unit/Data Service Unit) 信道服务单元/数据服务单元CTD (Cell Transfer Delay) 信元传送时延DACS (Digital Access and Cross-connect System) 数字交接系统DCA 数据通信体系结构DCE (Data Circuit-terminating Equipment) 数据电路端接设备DE (Discard Eligibility) 丢弃指示DES (Data Encryption Standard) 数据加密标准DHCP (Dynamic Host Configuration Protocol) 动态主机配置协议DLCI (Data Link Connection Identifier) 数据链路连接标识符DMT (Discrete Multi-Tone) 离散多音(调制)DNS (Domain Name System) 域名系统DNA 数据网络系统结构DSL (Digital Subscriber Line) 数字用户线DSLAM (DSL Access Multiplexer) 数字用户线接入复用器DSSS (Direct Sequence Spread Spectrum) 直接序列扩频DTE (Data Terminal Equipment) 数据终端设备DVMRP (Distance Vector Multicast Routing Protocol) 距离向量多播路由选择协议DWDM (Dense WDM) 密集波分复用EGP (External Gateway Protocol) 外部网关协议EIA (Electronic Industries Association )美国电子工业协会ESP (Encapsulating Security Payload) 封装安全有效载荷ESS 伍 xtended Service Set) 扩展的服务集FCS (Frame Check Sequence) 帧检验序列FDDI (Fiber Distributed Data Interface )光纤分布式数据接口FDM (Frequency Division Multiplexing) 频分复用FEC (Forwarding Equivalence Class) 转发等价类FEC (Forward Error Correction) 前向纠错FHSS (Frequency Hopping Spread Spectrum) 跳频扩频FIFO ( First In First Out) 先进先出FQ (Fair Queuing) 公平排队FR (Frame Relay) 帧中继FSK (Frequency Shift Keying) 移频键控FTP (File Transfer Protocol )文件传送协议FTTB (Fiber To The Building) 光纤到大楼FTTC (Fiber To The Curb )光纤到路边FTTH (Fiber To The Home) 光纤到家FTTD (Fiber To The Desk) 光纤到桌面FTTZ(Fiber To The Zone )光纤到小区FTTO (Fiber To The Office) 光纤到办公室FTTF (Fiber To The Floor) 光纤到楼层GIF (Graphics Interchange Format) 图形交换格式GII (Global Information Infrastructure) 全球信息基础结构,全球信息基础设施GFC ( Generic Flow Control) 通用流量控制GSM (Group Special Mobile) 群组专用移动通信体制HDLC (High-level Data Link Control) 面向比特的链路控制规程HDSL (High speed DSL) 高速数字用户线HEC (Header Error Control) 首部差错控制HFC (Hybrid Fiber Coax) 光纤同轴混合(网)HTML (HyperText Markup Language) 超文本置标语言HTTP (HyperText Transfer Protocol) 超文本传送协议IAB (Internet Architecture Board) 因特网体系结构委员会IAC ( Interpret As Command )作为命令解释IAHC (Internet International Ad Hoc Committee )因特网国际特别委员会ICMP ( Internet Control Message Protocol )因特网控制报文协议IDEA (International Data Encryption Algorithm) 国际数据加密算法IEEE电气和电子工程师协会IESG (Internet Engineering Steering Group) 因特网工程指导小组IETF (Internet Engineering Task Force) 因特网工程部IFS (Inter Frame Space) 帧间间隔IGMP (Internet Group Management Protocol) 因特网组管理协议IGP (Interior Gateway Protocol) 内部网关协议IM (Instant Messaging) 即时传信IMAP (Internet Message Access Protocol) 因特网报文存取协议IMP ( Interface Message Processor) 接口报文处理机IP (Internet Protocol )网际协议IR (InfraRed )红外技术IRTF ( Internet Research Task Force )因特网研究部ISDN (Integrated Services Digital Network) 综合业务数字网ISO ( International Organization for Standardization )国际标准化组织ISOC (Internet Society) 因特网协会ISP ( Internet Service Provider) 因特网服务提供者ITU ( International Telecommunication Union )国际电信联盟ITU-T ( ITU Telecommunication Standardization Sector) 国际电信联盟电信标准化部门JPEG (Joint Photographic Expert Group) 联合图像专家组标准KDC (Key Distribution Center) 密钥分配中心LAN (Local Area Network )局域网LANE (LAN Emulation )局域网仿真LAPB (Link Access Procedure Balanced) 链路接入规程(平衡型)LCP (Link Control Protocol) 链路控制协议LDP (Label Distribution Protocol) 标记分配协议LLC (Logical Link Control) 逻辑链路控制LSP (Label Switched Path) 标记交换路径LSR (Label Switching Router) 标记交换路由器MAC (Medium Access Control) 媒体接入控制MAN (Metropolitan Area Network) 城域网MAU (Medium Attachment Unit) 媒体连接单元MBONE (Multicast Backbone On the InterNEt )多播主干网MBS (Maximum Burst Size )最大突发长度MCR (Minimum Cell Rate )最小信元速率 MCU (Multipoint Control Unit)多点控制单元MD (Message Digest) 报文摘要MDI (Medium Dependent Interface )媒体相关接口MIB (Management Information Base) 管理信息库MIME (Multipurpose Internet Mail Extensions) 通用因特网邮件扩充modem 调制解调器MOTIF (Message Oriented Text Interchange System) 面向报文的电文交换系统MPEG (Motion Picture Experts Group) 活动图像专家组标准MPOA (MultiProtocol Over ATM) 多协议在 ATM 上运行MPLS (MultiProtocol Label Switching) 多协议标记交换MRU (Maximum Receive Unit) 最大接收单元MSS (Maximum Segment Size) 最长报文段MTU (Maximum Transfer Unit) 最大传送单元NAK (Negative AcKnowlegement) 否认帧NAP ( Network Access Point) 网络接入点N.ISDN (Narrowband-ISDN) 窄带综合业务数字网NAT (Network Address Translation )网络地址转换NAV (Network Al location Vector) 网络分配向量NCP (Network Control Protocol) 网络控制协议NFS (Network File System) 网络文件系统NGI 下一代因特网计划NIA 网络适配器NIC (Network Interface Card) 网络接口卡、网卡NII (National Information Infrastructure) 国家信息基础结构,国家信息基础设施NLRI (Network Layer Reachability Information) 网络层可达性信息NNI (Network-Node Interface) 网络结点接口NSF (National Science Foundation) (美国)国家科学基金会NVT (Network Virtual Terminal )网络虚拟终端ODBC (Open Database Connection)开放数据库互连OSF (Open Software Fundation )开放软件基金会OSI (Open System Interconnection )开放系统互联PBX (Private Branch eXchange )用户交换机PCM (Pulse Code Modulation ) 脉冲编码调制PCN (Personal Communications Network ) 个人通信网络PCR (Peak Cell Rate )峰值信元速率PCS 个人通信服务 Personal Communications ServicePDH 准同步数字系列PDA 个人数字助理 Personal Digital AssistantPDN 公用数据网 Public Data NetworkPDU 协议数据单元 Protocol Data UnitPER 分组差错率 packet error ratePIR 分组插入率 packet insertion ratePLCP 物理层会聚协议 Physical Layer Convergence ProtocolPLR 分组丢失率 packet loss ratePMD 物理媒体相关(子层) Physical Medium DependentPPP 点到点协议 Point to Point ProtocolPPTP 点对点隧道协议PRM 协议参考模型 Protocol Reference ModelPRN 分组无线网 Packet Radio NetworkPSN 分组交换节点 Packet Switch NodePSTN 公用电话交换网 Public Switched Telephone NetworkRARP 逆向地址解析协议 Reverse Address Resolution ProtocolRAS 远程访问服务器RFC 请求评注 Request for CommentsRMON 远程网络管理Router 路由器RPC 远程过程调用 Remote Procedure CallRSVP 资源重复利用协议RTP 接收和发送端口RTS 往返样本 Round Trip SampleRTS 剩余时间标签SAP 业务接入点 Service Access PointSAP 服务公告协议 Service Advertising ProtocolSAR 分段和重组(子层) Segmentation and ReassemblySDH 同步数字系列 Synchronous Digital HierarchySDLC 同步数据链路控制(协议) Advanced Data Communication Control Procedure SDTV 标准数字电视SDU 业务数据单元 Service Data UnitSIPP 增强的简单因特网协议 Simple Internet Protocol PlusSLIP 串行线路IP Serial Line Interface ProtocolSMDS 交换式多兆比特数据业务 Switched Multimegabit Data ServicesSMF 单模光纤 Single-mode FiberSMT 站点管理 Station ManagementSMTP 简单邮件传输协议 Simple Mail Transfer ProtocolSNA 系统网络体系结构 System Network ArchitectureSNMP 简单网络管理协议 Simple Network Management ProtocolSNR 信噪比 Signal-Noise ratioSONET 同步光纤网络 Synchronous Optical NetworkSTM 同步传输方式 Synchronous Transfer ModeSTP 屏蔽双绞线 Shielded Twisted PairSTS 同步传输信号 Synchronous Transport SignalSVC 交换虚电路 Switched Virtual CircuitSwitch 交换机TCP 传输控制协议 Transmission Control ProtocolTDM 时分多路复用 Time Division MultiplexingTFTP 单纯文件传输协议 Trivial File Transfer protocolTelnet 远程登录协议TIP 终端接口处理机 Terminal Interface ProcessorTP 双绞线 Twisted PairTSAP 传输层服务访问点 Transport Service Access PointUDP 用户数据报协议 User Datagram ProtocolUSB 通用串行总线 Universal Serial BusUTP 非屏蔽双绞线 Unshielded Twisted PairVAN 增值网 Value Added NetworkVBR 可变比特率 Variable Bit RateVCC 虚信道连接 Virtual Channel ConnectionVLAN 虚拟局域网 Virtual LANVLSI 超大规模集成电路VOD 点播图像 Video on DemandVPC 虚路径连接 Virtual Path ConnectionVPI 虚路径标识 virtual path identifierVPN 虚拟专用网络 Virtual Private NetworkVRML 虚拟现实造型语言 Virtual Reality Modeling Language VTP 虚拟隧道协议WAN 广域网 Wide Area NetworkWDM 波分多路复用 Wavelength Division MultiplexingWWW 万维网 World Wide Web。
计算机专业英语课文翻译
第4章操作系统第一部分阅读和翻译A部分 Windows 71. 简介Windows 7是微软最新发布的windows版本,这一系列微软制造的操作系统主要用于个人电脑,其中包括家庭和商业台式电脑、笔记本电脑、上网本、平板电脑、和媒体中心电脑。
(见图4.1)Windows 7于2009年7月22日开始生产,并在2009年10月22日零售,这个时间距其推出其前任Windows Vista不到三年时间。
与Windows 7相对应的Windows server 2008 R2,也是同年发布。
不像其前一操作系统vista,windows7 引入了大量的新特性,更集中于增量升级的windows线,目标是兼容已经在vista中兼容的应用程序和硬件。
微软在2008年的报告中关注于对于多点触控的支持,以及一个重新设计的windows shell和一个新的任务栏,并将其称之为Superbar,还有一个称之为家庭组的网络系统,注重性能改进。
之前版本的windows 系统中的一些标准的应用程序,包括windows日历,windows邮件,windows movie maker,和windows相片画廊在windows 7中并没有包含进来,而大多数是作为Windows Live Essentials套件单独免费进行提供的。
2. 发展最初,微软计划用一个代号为Blackcomb的windows版本来继承Windows XP(代号惠斯勒)和Windows Server 2003。
微软计划在Blackcomb中设计的主要功能包括在搜索中的加强,查询数据以及一个先进的存储命名系统。
然而,一个临时的,更小的,代号为Longhorn 的版本在2003年发布了。
微软在2003年中旬推迟发布了Blackcomb,但是Longhorn获得了大部分当初试图在Blackcomb中实现的特性。
在2003年,相继有三个主要病毒暴露了windows操作系统的一些漏洞,微软改变了其的发展重点,搁置了Longhorn的主要开发工作,主要开发windows xp和windows server 2003的服务包。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Homework(中英对照)Chapter 11.2 如果信号在0到10v 之间变化(即称动态范围),要求用计算机中使用的数字信号来表述,若分辨率要求为5mV , 问A/D 转换器应为多少位?1.3 描述5种你熟悉的控制系统。
并说明数字化执行比模拟化执行有何优点。
1.4: Point out which is the discrete signal, and which is the continuous signal. ① Temperature changes. ② Distance from A to B. ③ Signals plotted on radar screen. ④ Level of the tank (槽罐).⑤ Sampled values of the voltage.1.4 指出下面那些是离散信号,那些是模拟信号 ① 温度变化② A 到 B 的距离 ③ 雷达屏上的轨迹 ④ 槽罐的液位 ⑤ 电压的采样值1.5: Point out which is the continuous signal, and which is the discrete signal of 1 to 5 in following system.1.5 指出图中1到5点,那些是连续信号,那些是离散信号。
Chapter 323 4513.1 做下列事情:(a)为附录A.1中的卫星状态控制例题(G(s)=1/s2)设计一个连续超前补偿器,使其复根大约位于s=-1.4±j4.4r/s。
(b) 假设采用数字化实现,数字执行约有T/2的延时,即:G h(s)=(2/T)/[s+(2/T)]确定对于采样频率为w s=5Hz, 10Hz, 20Hz, T=1/w s时所对应的根的位置。
3.2重复例题3.1,但用下列近似:即欧拉方法的反向矩阵版本。
并与欧拉方法的前向矩阵版本比较。
并计算对w s=1—100Hz中的一个采样频率系数值。
假设连续系统的数值见式3.8,注意式3.7中的系数(1-bT)和(aT-1)是对应前向矩阵的。
3.3对于补偿器…….若采样频率为80Hz,用欧拉前向矩阵方法计算数字执行时的差分方程。
用欧拉反向矩阵方法重复上述计算,并作比较。
3.4 3.4 对于补偿器…….若采样频率为80Hz,用欧拉前向矩阵方法计算数字执行时的差分方程。
用欧拉反向矩阵方法重复上述计算,并作比较。
3.7 对于G(s)=1/s 2.(a) 设计一个连续补偿器,使闭环系统对阶跃输入时的指标为上升时间t r <1s ,以及超调量M p <15%。
(b) 如果反馈是由采样频率为5Hz 的数字化实现,修正补偿器,使其仍然满足指标要求。
(c) 求数字化实现时的差分方程。
Chapter 44.01 For a discrete system (对离散系统) y(k)-3 y(k-1)+2 y(k-2)=2 u(k-1)-2 u(k-2) where u(k)= k k ≥00 k <0 and y(0)=1, y(k)=0 k <0Find its output series by using recurrence and z-transform. (用递推法和z-变换法求其输出序列)4.02 Find the difference equation relating u(k) and y(k) for following discrete-time filter: (求下列离散时间滤波器的差分方程,该滤波器是否稳定)111()1(1/2)()[1(1/2)][1(1/3)]Y z z u z z z ---+=-+Is the filter stable or not?4.1 测试下列系统的稳定性:…4.5 对差分方程u(k+2)=0.25u(k).(a) 假设其解为u(k)=A i z k,求用z表达的特征方程。
(b) 求特征方程的根z1和z2,并判断其是否稳定。
(c) 假设其通解为u(k)=A1z1k+A2z2k,求满足初始条件u(0)=0, u(1)=1的A1和A2。
(d) 对于u(k+2)=-0.25u(k),重复(a)(b)(c)。
(e) 对于u(k+2)=u(k+1)-0.5u(k),重复(a)(b)(c)。
4.6 证明特征方程…..的根为….用差分方程表达下列方框图)Chapter 54.9 如果图4.12中的G(s) 如下(a)和(b),手算其离散传递函数。
5.16: For state-space system (对如下状态空间系统) 0.50.31(1)()()00.20x k x k u k --⎡⎤⎡⎤+=+⎢⎥⎢⎥⎣⎦⎣⎦ []()53()y k x k =-- Find the pulse transfer function of it. (求其脉冲传递函数)Chapter 66.3:(a). Compute the discrete equivalent to (计算下列设计的离散等价) The design is via: - Forward rectangular rule; (用前向矩阵法) - Backward rectangular rule; (用反向矩阵法) - Trapezoid rule; (用梯形法)- Zero-Pole Matching; (用零-极点映射法)1()0.11s H s s +=+- Zero-Order Hold Equivalents. (用零阶保持等价法)(b). For each of the design methods, compute and plot in the z-plane the poles and zeros locations. (对每种设计方法,计算并画出在z-平面上的零点和极点位置)Chapter 77.2 一伺服机械系统,若要求其上升时间不超过10ms,超调量不大于5%。
(a) 在平面上画出可接受的闭环极点区域。
(b) 在波特图上的增益穿越频率约为多少?(c) 相位裕量约为多少?(d) 如果由于采样与保持的影响在穿越频率处的相位偏移不超过10°,问采样周期应为多少?(e) 如果上升时间里采8个样,问采样周期应为多少?7.3: Show the sketch in s-domain and z- domain for specification (画出s-平面与z-平面下列指标的区域) M p, ts, tr.7.4: Describe the main methods of controller design with transform techniques. (描述用转换技术进行控制器设计的主要方法)7.5A discrete controller(0.8)()0.1z zD zz-=-to control a plant of0.9(1)(0.9)zGz z+--(z)=. Ifsample period is 1s, what is the steady-state error K v? (用控制器D(s)来控制对象G(s),若采样周期为1s,求其稳态误差K v)7.6 For a closed discrete system is: 1+K D(z)G(z) = 0 , If the open system is stable, What is thestability condition according to Nyquist critial for the closed system? And why?7.6 对离散系统,如果开环系统稳定1+K D(z)G(z) = 0,依据耐奎斯特判据其闭环系统是否稳定?为什么?Chapter 88.0: If state-space formula (若有状态方程) x(k+1)=Φx(k)+Γu(k)y=Hx(k)with control law (其控制率为) u(k)=-K x(k);What is the characteristic equation for this closed-loop system? (求其闭环系统的特征方程)8.1: Find the discrete equivalents for following state formulas with forward rectangular rule. (用前向矩阵法求下列状态方程的离散等价)8.2 对于开环系统Φ=…..,Γ=…..计算如果要求全状态反馈的闭环极点在z=0.9±j0.1位置,手工计算K 值。
8.3: For a state-space system as following Figure. Point out where is the estimator, where is the plant and where is the controller? (对于下图的状态空间系统,指出哪里是观测器、哪里是对象、哪里是控制器)8.4: Test the state-space system of following reachable and observable or not? (问下列状态空间系统是否能达与能观)10.51(1)()()00.20x k x k u k ⎡⎤⎡⎤+=+⎢⎥⎢⎥⎣⎦⎣⎦[]()10.5()y k x k =-xA xB u =+ y Cx =。