有限元教程 弹性力学基础知识2
弹性力学基础及有限单元法
第一章1、弹性力学的任务是什么弹性力学的任务是分析各种结构物或其构件在弹性阶段的应力和位移,校核它们是否具有所需的强度和刚度,并寻求或改进它们的计算方法。
2、弹性力学的基本假设是什么?为什么要采用这些假设?(1) 假设物体是连续的——物体内部由连续介质组成,物体中没有空隙,因此物体中的应力、应变、位移等量是连续的•可以用坐标的连续函数表示。
实际上,所有的物体均由分子构成,但分子的大小及分子间的距离与物体的尺寸相比是很微小的,故可以不考虑物体内的分个构造。
根据这个假设所得的结果与实验结果是符合的。
(2) 假设物体是匀质的和各向同性的一一物体内部各点与各方向上的介质相同,因此,物体各部分的物理性质是相同的。
这样,物体的弹性常数(弹性模量、泊松比)不随位置坐标和方向而变化。
钢材由微小结晶体组成,晶体本身是各向异性的、但由于晶体很微小而排列又不规则,按其材料的平均性质,可以认为钢材是各向同性的。
木材不是各向同性的。
(3) 假设物体是完全弹性的一一物体在外加因家(裁荷、温度变化等)的作用下发生变形,在外加固素去除后,物体完全恢复其原来形状而没有任何剩余变形。
同时还假定材料服从胡克定律,即应力与形变成正比。
(4) 假设物体的变形是很小的——在载荷或温度变化等的作用下,物体变形而产生的位移,与物体的尺寸相比,是很微小的。
在研究物体受力后的平衡状态时,可以不考虑物体尺寸的改变。
在研究物体的应变时,可以赂去应变的乘积,因此,在微小形变的情况下弹性理论中的微分方程将是线性的。
(5) 假设物体内无初应力一一认为物体是处于自然状态,即在载荷或温度变化等作用之前,物体内部没合应力。
也就是说,出弹性理论所求得的应力仅仅是由于载荷或温度变化等所产生的。
物体中初应力的性质及数值与物体形成的历史有关。
若物体中有韧应力存在,则由弹性理论所求得的应力加上初应力才是物体中的实际应力。
上面基本假设中•假设(4)是属于几何假设,其他假设是属于物理假设。
第二章弹性力学基础

+
¶ 2 x ¶ z2
材料力学 — 区别与联系 — 弹性力学
y
y
q
q
sx
ͼ 1-1a
x 0
sx x
X方向应力情况对比
ͼ 1-1b
材料力学 — 区别与联系 — 弹性力学
y q
y q
sx sy
ͼ 1-2a
平面截面假设
sx
sy
x
x
ͼ 1-2b
q
sy =q ͼ 1-2c
sx
Y方向应力情况对比
材料力学 — 区别与联系 — 弹性力学
v
A
B u + ¶u dx
dx
¶x
0 ͼ 1-5
由于变形是微小的,所 以上式可将比单位值小 得多的 ¶u 略去,得
¶x
a = ¶v
¶x
同理,Y向线素AD的转角
b = ¶u
¶y
因此,剪应变为:
x
xy
=
a
+
b
=
¶v ¶x
+
¶u ¶y
应变分量与位移分量的关系
以上是考察了体素在XOY一个平面内的变形情况,
相反,如果某一个面上的外法线是沿着坐标轴 的负方向,这个面上的应力就以沿坐标轴的负方向 为正,沿坐标轴正方向为负。
二、 应力的概念
剪应力互等定律
作用在两个互相垂直的面上并且垂直于该两 面交线的剪应力是互等的。(大小相等,正负号也 相同)。因此剪应力记号的两个角码可以对调。
由力矩平衡得出 简化得
2 yz dXdZ
sz
xy
yz
zx
T
(1 - 2)
第2讲 弹性力学基础及有限元法的基本原理

pvy
pvz
T
2)面力 定义:作用于弹性体表面上的外力,如:流体压力 可以分解为三个坐标系上的分量,用向量表示为:
Ps psx
psy
psz
T
3)集中力 定义:集中在某一点上的外力,如:牵引力 可以分解为三个坐标系上的分量,用向量表示为:
Pc pcx
pcy
pcz
zx zy 0 此时, z zx zy 0 以及 z 1 x y T 应力应变分量变为: x y xy
x y xy
几何方程
x x 0 y xy y 0 u x v xx
其中: E为杨氏弹性模量
为柏松比
G为剪切弹性模量 E 且:G 2(1 )
因此物理方程可以简写为: 1 1 1 E (1 ) D (1 )(1 2 ) 0 0 0
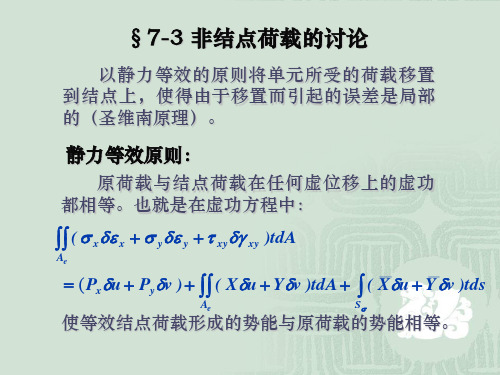
2)应力在虚应变上所做的虚功,也就是存储在弹性 体内的虚应变能为:
U dV
T V
2、虚位移原理
表述:如果在在虚位移发生之前弹性体是平衡的, 那么在虚位移发生时外力在虚位移上所做的 功就等于弹性体的虚应变能。即:
W U
当外力的形式是多样的时,外力的虚功等于:
0 0 0 0 0 0 0 0
x 0 0 L y 0 z
0 0 0 0 1 2 2(1 ) 0
0 0 0 0 1 2 2(1 ) 0
第二章 弹性力学问题有限元方法的一般原理和表达格式
第二章 弹性力学问题有限元方法的一般原理和表达格式 2.1 引言本章将讨论通过弹性力学变分原理建立弹性力学问题有限元法列式的基本步骤。
最小位能原理的未知场变量是位移,以结点位移为基本未知量,并以最小位能为基础建立的有限单元位移元。
它是有限元方法中应用最普遍的单元。
对于一个力学或物理问题,在建立其数学模型以后,用有限元方法对它进行分析的首要步骤是选择单元形式。
平面问题三结点三角形单元是有限元方法最早采用,而且至今仍经常采用的单元形式。
我们将以此作为典型,讨论如何应用广义坐标建立单元位移模式与位移插值函数,以及如何根据最小位能原理建立有限元求解方程的原理、方法与步骤,并进而导出弹性力学问题有限元方法的一般列式。
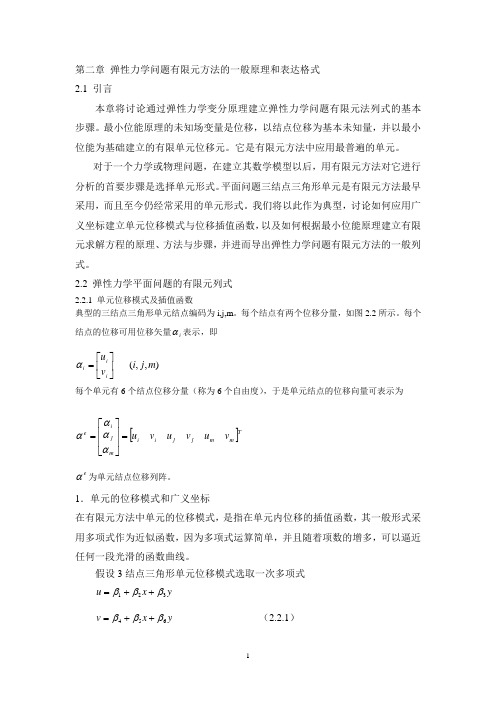
2.2 弹性力学平面问题的有限元列式2.2.1 单元位移模式及插值函数典型的三结点三角形单元结点编码为i,j,m 。
每个结点有两个位移分量,如图2.2所示。
每个结点的位移可用位移矢量i α表示,即⎥⎦⎤⎢⎣⎡=i i i v u α ),,(m j i每个单元有6个结点位移分量(称为6个自由度),于是单元结点的位移向量可表示为[]Tm m j j i im j i e v u v u v u =⎥⎥⎦⎤⎢⎢⎣⎡=ααααe α为单元结点位移列阵。
1.单元的位移模式和广义坐标在有限元方法中单元的位移模式,是指在单元内位移的插值函数,其一般形式采用多项式作为近似函数,因为多项式运算简单,并且随着项数的增多,可以逼近任何一段光滑的函数曲线。
假设3结点三角形单元位移模式选取一次多项式y x u 321βββ++=y x v 654βββ++= (2.2.1)它的矩阵形式是φβ=u (2.2.2)其中⎥⎦⎤⎢⎣⎡=v u u ,⎥⎦⎤⎢⎣⎡=ϕϕφ00 []y x 1=ϕ[]T 654321βββββββ=由于三个结点也在单元内,满足位移模式,于是得i i i y x u 321βββ++=j j j y x u 321βββ++= (2.2.3) m m m y x u 321βββ++=上式是关于321,,βββ的线性方程组。
弹性力学 第13讲 有限元法(2) PPT课件
y
P/2
局部编码 i, j, m 整体编码1,2,3,4
4 ji
I
m 1
3 m
II
1m
j i
x
2
P/2
1. 结点位移
2m
1 2 3 4T i ui vi T i 1,2,3,4
6
2. 结点力
以结点2平衡为例:
R2 F2
II I
j i
x
1
2
P/2
2m
R1 FmI
R
R2
R3
FiI FmII
F
II j
R4
F
I j
F
II j
4. 引入边界条件
1k11 0k12 k013 0k14 k015 k016 u1u1 0X1
其中: {d} N {}e — 单元内点位移
{R}e [N ]T {G}tdA [N ]T {P }tds [N ]T {P}
Ae
S
•等效结点力举例:
线性位移模式
y
j
(1)形心c重力荷载W的 等效结点力:
b c
i’ 1
i
m
W Vi
o
mb bj
bc 1 bi x
3
∴荷载列阵:
体系的虚功关系:
Vi
1
W
1 3
Vi
W 3
Fe W 0 1 0 1 0 1T
3
(2)单元边界上分布荷载的等效结点力:
y
m o
{Pp }e [N ]T {P }tds
弹性力学与有限元完整版
Z面 X面
•②应力符号意义
•正应力: 由法线方向确定
x、 y、 z
•剪应力: xy
作用面
作用方向
•符号规定:
正面上与坐标轴正向一致,为正;
负面上与坐标轴负向一致,为正。
正面 负面
Z面
X面
•③剪应力互等定理
xy yx
相等
yz zy
xz zx
4. 完全弹性假设
应力和应变之间存在一一对应关系,与时间及变形历史无关。满 足胡克定理。
5. 小变形假设
在弹性体的平衡等问题讨论时,不考虑因变形所引起的几何尺寸 变化,使用物体变形前的几何尺寸来替代变形后的尺寸。采用这 一假设,在基本方程中,略去位移、应变和应力分量的高阶小量 ,使基本方程成为线性的偏微分方程组。
大小和方向不同。
体力分量:将体力沿三个坐标轴xyz 分解,用X
、Y、Z表示,称为体力分量。
符号规定:与坐标轴方向一致为正,反之为负
。 应该注意的是:在弹性力学中,体力是指单位
体积的力 。
体力的因次:[力]/[长度]^3
表示:F={X Y Z}
② 面力
与体力相似,在物体表面上任意一点P 所受面力的大小 和方向,在P点区域取微小面积元素△S ,
压力,物体之间的接触力等。
集中力——作用物体一点上的力。(在弹性力学中一
般所受体力的大小和方向,在P点区域取
一微小体积元素△V, 设△V 的体力合力为△F,则
△V 的平均体力为
当△V 趋近于0, 则为P点的体力
体力是矢量:一般情况下,物体每个点体力的
第一篇 弹性力学
第一章 弹性力学基本方程
1.1 绪论 1.2 弹性力学的基本假定 1.3 几个基本概念 1.4 弹性力学基本方程
有限元分析方法第二章弹性力学基础
2.4.3 材料物理方程
(二)对于平面应变问题 3、将E换成 ,μ换成 ,可将 两种平面问题的应力应变关系写成如 下简洁的矩阵形式 σ=Dε 平面应力问题:
E1=E,μ1=μ 平面应变问题:
51
2.4.4 边界条件
位移边界条件 给定位移边界 Su ,物体的位移分量必须
等于边界上的已知位移,即
x
41
2.4.2 几何方程
(二)建立几何方程 1、定义x方向的线应变
y u
v v dy y u dy y
B'' B
xy
B'
A'
yx
v dx x
dy P' v P o u dx A'' A
u u dx x
v
x
42
2.4.2 几何方程
(二)建立几何方程 2、定义y方向的线应变
52
2.4.4 边界条件
力边界条件 给定面力边界 Sσ ,应力分量与面力分量
应满足平衡关系,在力边界点即在该点 的分布面力的两个分量为
53
2.4.5 平面问题的基本解法
8个未知变量 u,v,εx,εy,γxy,σx,σy,τxy 8个独立方程 平衡微分方程
xy yx
18
2.2 弹性力学中的基本量
(三)应力 1、应力6分量
19
2.2 弹性力学中的基本量
(三)应力 2、应力分量的正负约定
当外法线方向与坐标轴正向一致时为正坐 标面,如图中所示。反之,为负坐标面。 正坐标面上的应力分量以沿坐标正方向为 正,负坐标面上的应力分量以沿坐标的负 向为正。 2 应力的量纲是[力/长度 ]
2 弹性力学与有限元法
•剪应力
图1
2013-7-21
8
Institute of Mechanical Engineering and Automation
[ 应力的概念 ]
•正应力 为了表明这个正应力的作用面和作用方向,加上一个 角码,例如,正应力σx是作用在垂直于x轴的面上同时也 沿着x轴方向作用的。 •剪应力 加上两个角码,前一个角码表明作用面垂直于哪一个坐 标轴,后一个角码表明作用方向沿着哪一个坐标轴。例如, 剪应力τxy是作用在垂直于x轴的面上而沿着y轴方向作用的。
[ 几何方程、刚体位移 ]
•求剪应变 xy ,也就是线素AB与AD之间的直角的改变 •x向线素AB的转角 a y向线素AD的转角 b
y
u u dy y
C'
v
v dy y
D" b D '
D C
•A点在y方向的位移分量 为v; •B点在y方向的位移分量:
v
u
A
A'
a
dy
B'
v v dx x
连续性假设
2013-7-21
完全弹性假设 均匀性和各向同性假设 小变形、小转动假设 自然状态假设(无初始应力)
4
Institute of Mechanical Engineering and Automation
基本定律
牛顿定律
动量平衡原理
⇨ 平衡(运动)微分方程
⇨ 应力张量的对称性
u dx x
u
A'
a
A dx 0
2013-7-21
B
u u dx x
B"
x
图2
有限元分析第3章弹性力学基础知识2
应变能密度的性质
U0 1 x x y y z z xy xy yz yz zx zx 2 1 1 2 2 2 2 2 2 U 0 ij x y z x y y z z x xy yz zx 2E E 2G 1 2 2 2 2 2 2 2 U 0 ij e 2 G G x y z xy yz zx 2
1
1
1 1
1 0 0 0
0 0 0 1 2 2 1 0 0
0 0 0 0 1 2 2 1 0
1
0 0 0
xy yz zx
xy
G
yz
G
0 x 0 y z 0 xy yz 0 zx 1 2 2 1 0
2、力的边界条件
边界上给定面力时,则物体边界上的应 力应满足与面力相平衡的力的平衡条件
X 0
以二维问题为例
注意ds为边界斜边的长度,边界外法 线n的方向余弦l=dy/ds,m=dx/ds
有:
一、弹性力学的边界条件
以二维问题为例
同理:
Y 0
M 0
一、弹性力学的边界条件
以二维问题为例
x z y
T
w (x,y,z) dz v dx u
Sp
dy
Ω
Su
一、弹性力学的边界条件
1、位移边界条件
T 边界上已知位移时,应建 立物体边界上点的位移与 给定位移相等的条件
w (x,y,z) dz v dx u dy
弹性力学基础(二)
给定作用在物体全部边界或内部的外界作用(包括温度影响、外力等), 求解物体内由此产生的应力场和位移场。
对物体内任意一点,当它处在弹性阶段时,其应力分量、应变分量、 位移分量等15个未知函数要满足平衡方程、几何方程、本构方程,这15个 泛定方程,同时在边界上要满足给定的全部边界条件。
定解条件:
满足基本方程和边界条件的解是存在的,而且在小变形条件下,对于受 一组平衡力系作用的物体,应力和应变的解是唯一的。
7.6 弹性力学问题的基本解法
7.6.1 位移法 以位移作为基本未知量,将泛定方程用位移u,v,w来表示。
sx
2G
x
u 1 2u
sy
2G
y
u 1 2u
sz
2G
z
u 1 2u
t xy 2G xy t yz 2G yz t zx 2G zx
t zx z
Fbx
0
t xy x
s y y
t zy z
Fby
0
t xz x
t yz y
s z z
Fbz
0
将本构关系代入到平衡方程中
x
2u
Fbx
0
y
2v Fby
0
z
2w
Fbz
0
u j, ji ui, jj 0
式中▽2为拉普拉斯(Laplace)算子
2u 2u 2v 2w x2 y 2 z 2
x
u x
y
v y
z
w z
xy
u y
v x
yz
v z
w y
zx
w x
u
z
将几何关系代入到本构关系中
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
nx 0 0
0 ny 0
0 0 nz
ny nx 0
0 nz ny
n p
on S p
二、弹性力学中的能量表述
功能原理的两个基本概念:
功(work):外力功; 能量(energy):如动能、势能、热能等 弹性问题中的功和能量: 外力功:施加外力在可能位移上所做的功
应变能:变形体由于变形而储存的能量
弹性力学基本方程
对称
1 x 1 y z E 1 1 xy 1 1 2 0 yz 0 zx 0
L:微分算子
Lu
上节回顾
平 衡 方 程
弹性力学基本方程
yx x zx bx 0 x y z xy y zy by 0 x y z yz xz z bz 0 x y z
x 0 0 y x 0 x z y bx 0 z by 0 yx b z zy x xz
其中:i,j = x,y,z。μ,λ称为拉梅常量,其与工程弹性常数 E,ν的关系为:
3 2 E , 2
不难发现:
U 0 ij ij
ij
U 0 ij ij
ij
弹性应变能密度U0(εij)(或U0(σij) )对任一应变分量(或应 力分量)的改变率等于相应的应力分量(或应变分量)。
基本方程组,普遍规律
(2)在物体边界:应力分量、应变分量和位移分量满足:
位移边界条件 力的边界条件
定解条件,特定规律。
每一个具体 问题反映在 各自的边界 条件上
三、弹性力学边值问题
弹性力学边值问题提法:
求u,σ,ε,满足:
A b 0 Lu D
u u v v w w
应变能密度的性质
U0 1 x x y y z z xy xy yz yz zx zx 2 1 1 2 2 2 2 2 2 U 0 ij x y z E x y y z z x 2G xy yz zx 2E 1 2 2 2 2 2 U 0 ij e2 2G x y z2 G xy yz zx 2
上节回顾
弹性力学基本变量
变形体的描述:
在外部力和约束作用下的变形体
位移的描述 形状改变的描述
力的描述
材料的描述
上节回顾
弹性力学基本变量
描述变形体的三类变量:
位 应 应 移 变 力 物体变形后的位置 物体的变形程度
物体的受力状态
物体的材料特性
材料参数
弹性力学基本变量
w (x,y,z)
上节回顾
T
Sp
2、力的边界条件
边界上给定面力时,则物体边界上的应 力应满足与面力相平衡的力的平衡条件
X 0
以二维问题为例
注意ds为边界斜边的长度,边界外法 线n的方向余弦l=dy/ds,m=dx/ds
有:
一、弹性力学的边界条件
以二维问题为例
同理:
Y 0
M 0
一、弹性力学的边界条件
以二维问题为例
上节回顾
应力张量 (stress tensor)
x xy xz yx y yz zx zy z
弹性力学基本变量
应变张量 (strain tensor)
w (x,y,z) dz v dx u dy
上节回顾
x
dx
x
du x dx
fx
fy
FN
FS
关于弹性力学解的唯一性的讨论 ——圣维南原理
利用Ansys初步体会圣维南原理的正确性
二、弹性力学中的能量表述
1. 弹性力学中的外力功(work by force)
弹性力学中的外力包括:面力和体力,故外力功包括: Part 1:面力pi在对应位移上ui上的功(on Sp) Part 2:体力bi在对应位移上ui上的功(in Ω)
外力总功为:
W
Sp
p u p v p w dS b u b v b w d
u +du
u
x yx zx
xy xz y yz zy z
α
γ=α+β
τ
β
上节回顾
位 应 应 移
弹性力学的基本方程
几何方程
变 力 物理方程 弹性力学 三大方程
平衡方程
上节回顾
几 何 方 程
u x x v y y w z z u v xy y x v w yz z y w u zx x z
dz v dx dy
位移(displacement) 是指位置的移动。它 在 x, y 和 z 轴上的投 影用 u, v 和w。
z
u
Ω
y x
Su
弹性力学基本变量
T
w
上节回顾
微元体
(x,y,z)
dz v dx u dy
Sp
( Representative volume )
Ω
z
y x
Su
弹性力学基本变量
由叠加原理,将所有方向正应力正应变、剪应力剪应变所产生的 变形能叠加
应变能密度
U0 1 x x y y z z xy xy yz yz zx zx 2 1 1 2 2 2 2 U 0 ij x2 y z2 x y y z z x xy yz zx 2E E 2G 1 2 2 2 2 2 U 0 ij e2 2G x y z2 G xy yz zx 2
上节回顾
弹性力学的 “三个基本”
1、基本假定
2、基本变量 3、基本方程
上节回顾
弹性力学的基本假定
五个基本假定: 1、连续性(Continuity) 2、线弹性(Linear elastic) 3、均匀性(Homogeneity) 4、各向同性(Isotropy) 5、小变形假定(Small deformation)
0 y 0
0 0 z
0 z y
A:微分算子
A b 0
A L
T
上节回顾
物理方程
1 x x y z E 1 y y z x E 1 z z x y E
x z
T
w (x,y,z) dz v dx u
Sp
dy
Ω
y
Su
一、弹性力学的边界条件
1、位移边界条件
T 边界上已知位移时,应建 立物体边界上点的位移与 给定位移相等的条件
w (x,y,z) dz v dx u dy
Sp
u u v v w w
on Su
z y x
Ω
Su
一、弹性力学的边界条件
基本 方程: 边界 条件:
in
on Su
已经证明:该 问题有解,而 且解唯一。
但很难求解!
n p
on S p
关于弹性力学解的唯一性的讨论 ——圣维南原理
由弹性力学解的唯一性可知, 边界条件不同,则解不同,
但实际应用中出现的 事实是:
圣维南发现了这一事实,并总结为:
关于弹性力学解的唯一性的讨论 ——圣维南原理
三、弹性力学边值问题
求解弹性力学问题的目的:
求出物体内部各点的应力、应变和位移,即应力场、应变场和位移场。
弹性力学问题的提法:
给定作用在物体全部边界或内部的外界作用(包括温度影响、外力 等),求解物体内由此产生的应力场和位移场。具体要求: (1)在物体内部各点:应力分量、应变分量和位移分量满足:
平衡方程(3个) 几何方程(6个) 物理方程(6个)
zx
G
D:弹性矩阵
D
上节回顾
弹性力学三大方程
弹性力学基本方程
T
w (x,y,z) dz v dx dy
A b 0 Lu D
z
Sp
பைடு நூலகம்
u
Ω
in
x
y
Su
边界上呢?
一、弹性力学的边界条件 (Boundary condition)
两类边界条件: Sp:力的边界
Su:位移边界
弹性力学基本方程
x x 0 y z 0 xy y yz zx 0 z 0 y 0 x z 0 0 0 u z v 0 w y x
有限元分析
Finite Element Analysis
李建宇
天津科技大学
内容 弹性力学基础知识 2
1. 边界条件 2. 弹性力学中的能量表示 3. 弹性力学边值问题
要求 理解: 弹性力学边界条件的提法 了解: 弹性力学边值问题的内涵 掌握: 弹性力学中的能量表述
课后作业 继续检索、阅读弹性力学基本文献
1
1
1 1
1 0 0 0
0 0 0 1 2 2 1 0 0
0 0 0 0 1 2 2 1 0
1
0 0 0
xy yz zx
xy
G
yz