体内微型机器人的全方位旋进驱动特性
医用微型机器人蠕动肠道中的驱动力计算及实验研究
维普资讯
中国 机 械 工 程 第 1 第 1期 2 0 3卷 0 2年 1月 上 半 月
一
R K l t
f
{1
1I 1
塑 t一 9 zO
— — ; 熹 ,J , f i ~ 1。 磊 J 2 z J 1
器 人 前 进 ; 反 向 接 通 微 电 机 电 源 时 。 使 微 型 机 当 则 器 人 后 退 。 于 动 压 效 应 作 用 。 它 的 周 围 会 自动 由 在
牧 稿 日期 :0 l O — 2 20— 3 9
机 械感 应 器 能够对 管 腔 内 的刺 激产 生 响应 ( 壁 如
此 润 滑 膜 能 避 免 机 器 人 与 管道 壁 发 生 直 接 接 触 。 合 人 体 肠 道 的 蠕 动 方 程 和 结
N—S方程 利 用有 限元 分析 计 算 了此 种微 型 机 器 人在 蠕 动 肠 道 中的驱 动 力 和运 行速度 + 行 了机 器人 的运 行 实验 , 果表 明 , 器人 能 以较 快速度在 肠 进 结 机
个 带右 螺 旋 槽 的 圆柱 形 微 电机 、 个 带 左 螺 旋 槽 1
的圆柱体 和 1个柔 性联 轴 器构成 在肠 道 中 由于 肠 液或 其 它 填充 液 体 的存 在 , 当正 向接 通 微 电 机 电源时 , 左 螺旋槽 的 圆柱 体正转 , 带 带右 螺旋槽 的 微 电机 外壳 反转 , 圆柱 体 会产生 轴 向摩擦牵 引 力 . 但 2圆柱体 产 生 的 牵 引力 方 向相 同 , 动微 型 机 带
岬 =
E 乓
譬嚣螺
式 中, £和 占为 腑 壁 变 形 的 径 向 分 量 和轴 向 分 量 ; 为未 R 变 形 的 肠 道 半 径 ; 为 单 位 肠 壁 与 肠 道 中 心 轴 的 夹 角 i’ . T 和 了 为 作用 于腑 膜 单 位 长 度 的 张 力 的环 向 分 量 和纵 向 分 1 , 量 { 标 为 环 向 层 ; 纵 向层 ; 为 线 性 化 的速 度 张 力 下 』为 K 图 3 计 算 驱 动 力 和 液 膜 厚 度 的 坐 标
机器人的主要驱动方式及其特点
一目前机器人的主要驱动方式及其特点根据能量转换方式,将驱动器划分为液压驱动、气压驱动、电气驱动和新型驱动装置。
在选择机器人驱动器时,除了要充分考虑机器人的工作要求,如工作速度、最大搬运物重、驱动功率、驱动平稳性、精度要求外,还应考虑到是否能够在较大的惯性负载条件下,提供足够的加速度以满足作业要求.A液压驱动特点液压驱动所用的压力为5~320kgf/cm2.a)优点1能够以较小的驱动器输出较大的驱动力或力矩,即获得较大的功率重量比。
2可以把驱动油缸直接做成关节的一部分,故结构简单紧凑,刚性好。
3由于液体的不可压缩性,定位精度比气压驱动高,并可实现任意位置的开停。
4液压驱动调速比较简单和平稳,能在很大调整范围内实现无级调速.5使用安全阀可简单而有效的防止过载现象发生。
6液压驱动具有润滑性能好、寿命长等特点.B)缺点1油液容易泄漏。
这不仅影响工作的稳定性与定位精度,而且会造成环境污染.2因油液粘度随温度而变化,且在高温与低温条件下很难应用。
3因油液中容易混入气泡、水分等,使系统的刚性降低,速度特性及定位精度变坏。
4需配备压力源及复杂的管路系统,因此成本较高。
C)适用范围液压驱动方式大多用于要求输出力较大而运动速度较低的场合。
在机器人液压驱动系统中,近年来以电液伺服系统驱动最具有代表性。
B气压驱动的特点气压驱动在工业机械手中用的较多。
使用的压力通常在0。
4-0.6Mpa,最高可达1Mpa。
a)优点1快速性好,这是因为压缩空气的黏性小,流速大,一般压缩空气在管路中流速可达180m/s,而油液在管路中的流速仅为2。
5-4。
5 m/s.2气源方便,一般工厂都有压缩空气站供应压缩空气,亦可由空气压缩机取得。
3废气可直接排入大气不会造成污染,因而在任何位置只需一根高压管连接即可工作,所以比液压驱动干净而简单。
4通过调节气量可实现无级变速。
5由于空气的可压缩性,气压驱动系统具有较好的缓冲作用。
6可以把驱动器做成关节的一部分,因而结构简单、刚性好、成本低.b)缺点1因为工作压力偏低,所以功率重量比小、驱动装置体积大.2基于气体的可压缩性,气压驱动很难保证较高的定位精度。
微型机器人驱动技术

微型机器人驱动技术目前,微型机器人常用的驱动技术概括起来主要有:气动、热驱动、微电机驱动、智能材料驱动和能量场驱动。
其中,智能材料驱动常用的有形状记忆合金( SMA)、人工肌肉材料( IPMC)、压电材料( PZT)、巨磁致伸缩材料( GMA);能量场驱动常用的有微波、光波、磁场和超声波等。
一、气动形式韩国研制出了单气动线路驱动的蚯蚓型管道检测微机器人。
该机器人由前气室、后气室和伸展模块 3 部分组成,3 个气室被一个充气管道连接起来。
首先,后气室逐渐充入空气并膨胀,机器人身体后部的夹钳紧贴到被检测管道表面; 然后空气使伸展模块内的气室充气、膨胀,机器人就向前伸展身体; 随着空气的不断充入,前气室也逐渐膨胀并达到特定气压值,身体前部的夹钳紧贴到管道表面; 然后通过排气使后气室在气流反作用力下前进,同时伸展模块收缩。
通过气阀使充气和排气循环交替进行,就实现了像蚯蚓一样的运动。
图1、蚯蚓型管道检测微机器人第二、热驱动形式美国研制出一种热驱动机器人,它的运动主要由热敏晶片的热胀冷缩来完成,热敏晶片由热膨胀系数不同的两层聚合物中夹一个钛钨合金电阻构成,当加热电流通过回路时,热敏晶片向热膨胀系数小的聚合物一侧弯曲,就实现了单自由度运动。
图2、热驱动机器人第三、微电机驱动形式南京航空航天大学研制出了微电机驱动的精子形微机器人。
该微机器人由椭圆形的头部和 4 个柔软的鞭毛组成,鞭毛由机器人头部内置的 4 个微电机驱动,当柔软的鞭毛被微电机带动在液体环境中旋转时,它们将形成又长又细的螺旋,液体作用于鞭毛的粘滞力将对微机器人产生推力从而使其前进。
图3、精子形微机器人第四、智能材料驱动形式韩国研制了一种形状记忆合金( SMA) 驱动的仿蚯蚓型微机器人。
形状记忆合金和波纹管组合使微机器人伸缩前行,具体移动过程是: 硅树脂波纹管作为弹簧提供变形力,当 SMA 弹簧被加热收缩时,微机器人前部的微针钳住接触面,躯干后部向前滑动,同时 SMA 外部的硅树脂波纹管收缩储存变形能;然后,SMA 弹簧冷却,波纹管储存的变形能使 SMA 弹簧伸长,同时,后部的微针钳住接触面,躯干前部向前滑动;最后,波纹管和 SMA 弹簧回到初始平衡状态,二者弹力相等。
纳米机器人可具备驱动系统
纳米机器人可具备驱动系统一、纳米机器人从广义上来讲,只要在纳米尺度(一纳米等于十亿分之一米)能够进行运动和操作的系统都可叫做纳米机器人。
纳米机器人是纳米生物学中最具有诱惑力的内容,也是当今高新科技的前沿热点之一。
不少科学家都看好纳米机器人的应用前景和实用价值,一些发达国家还制定了相关的战略性计划,投入巨资抢占纳米机器人技术高地。
目前研发的纳米机器人属于第一代,是生物系统和机械系统的有机结合体,这代纳米机器人可以注入人体血管内,进行健康检查和疾病治疗;第二代纳米机器人是直接从原子或分子装配成具有特定功能的纳米尺度的分子装置,能够执行复杂的纳米级别的任务;第三代纳米机器人将包含有强人工智能和纳米计算机,是一种可以进行人机对话的智能装置。
许多专家强调:当前最重要、最迫切的就是纳米机器人在医疗领域的应用。
医用纳米机器人可以注入人体血管内,进行血管养护、健康检查、精准给药、疾病治疗和器官修复等,还可从基因中除去有害的脱氧核糖核酸(DNA),或把正常的DNA安装在基因中,使机体正常运行。
在可预见的未来,被视为当今疑难病症(如癌症、艾滋病、高血压等)都将迎刃而解。
不过到目前为止,医用纳米机器人技术依然停留在研发试验阶段,一些技术性障碍还有待破解。
从现阶段来讲,受技术水平限制,纳米机器人在驱动、控制、传感反馈、复合材料等方面都存在研究瓶颈。
尽管如此,许多专家还是认为,纳米机器人将带来一场医学革命。
美国工程师、未来学家雷·科兹威尔博士甚至认为,到2030年,纳米机器人将可借助无创的方式进入人类大脑,届时人类将变得更长寿、更聪明和更幽默。
二、纳米机器人驱动系统纳米机器人能够具备驱动系统,科学家们希望它们在进入体内后可以通过自我驱动主动向肿瘤部位移动,从而在肿瘤部位富集,达到靶向治疗的效果。
驱动系统,就是微纳米级别的“发动机”,它能够将其他形式的能量转化为驱动纳米机器人的能量。
化学反应驱动是目前常见的驱动方式。
机器人驱动与控制及应用实例步进电动机的特点
机器人驱动与控制及应用实例步进电动机的特点机器人驱动与控制及应用实例一、机器人驱动与控制简介机器人的驱动和控制是机器人技术中最为关键的环节之一。
在机器人的运动过程中,通常需要使用到各种不同类型的电机,如步进电机、直流电机、交流电机等。
不同类型的电机有着各自独特的特点和优缺点,需要根据实际需求进行选择。
在驱动方面,一般采用直接驱动或间接驱动两种方式。
直接驱动是指将电机直接连接到关节上,这种方式可以提高精度和速度,并且减少了传动装置对系统稳定性的影响;间接驱动则是通过齿轮、皮带等传动装置将电机与关节连接起来,这种方式可以降低成本并且提高可靠性。
在控制方面,通常采用PID控制算法或者模糊控制算法。
PID控制算法具有简单易懂、计算量小等优点,在工业生产中得到了广泛应用;而模糊控制算法则能够更好地处理非线性问题和模糊问题,在智能化领域得到了广泛应用。
二、步进电动机的特点步进电动机是一种常用的电机类型,其特点主要有以下几个方面:1. 精度高:步进电动机可以实现非常精确的位置控制和速度控制,适用于需要高精度运动的场合。
2. 可控性强:步进电动机可以通过控制脉冲数来实现位置和速度的控制,控制方式简单易懂。
3. 静音性好:步进电动机在运行时噪音较小,适用于对噪声要求较高的场合。
4. 结构简单:步进电动机结构简单、体积小、重量轻,易于安装和维护。
5. 价格适中:相比其他类型的电机,步进电动机价格相对较低,在一些经济条件有限的场合得到广泛应用。
三、应用实例1. 3D打印在3D打印中,需要将打印头准确地移动到指定位置进行打印。
此时采用步进电动机可以实现非常精确的位置和速度控制,从而保证了打印质量。
同时由于步进电动机结构简单、价格适中,在3D打印设备中得到了广泛应用。
2. 机器人臂机器人臂需要实现精确的位置控制和速度控制,以完成各种任务。
采用步进电动机可以实现高精度的位置和速度控制,同时由于静音性好、结构简单等特点,也逐渐成为了机器人臂中常用的电机类型。
磁力驱动微型机器人的设计与控制

磁力驱动微型机器人的设计与控制随着科技的不断发展,人们对微型机器人的需求也日益增加。
微型机器人在医疗、环境监测、军事等领域都有着广阔的应用前景。
然而,由于其尺寸小、操作环境复杂等特点,设计和控制微型机器人面临着很大的挑战。
为了克服这些困难,磁力驱动被广泛认为是一种有效的方法。
本文将探讨磁力驱动微型机器人的设计与控制。
一、磁力驱动的优势磁力驱动是指利用磁力对微型机器人进行驱动和控制的技术。
相比于其他传统驱动方式,磁力驱动具有以下优势:1. 操控精度高:通过调节外部磁力场的强度和方向,可以轻松控制微型机器人的运动轨迹和速度。
2. 无线驱动:磁力驱动不需要接触式传输能量,可以通过无线方式提供驱动力,便于机器人在狭小的空间内自由移动。
3. 适应性强:不同材料的微型机器人都可以通过磁力驱动实现操控,无需进行额外的适应性改造。
4. 环境友好:磁力驱动无需燃料燃烧,不会产生有害气体和噪音,对环境友好。
二、磁力驱动微型机器人的设计磁力驱动微型机器人的设计涉及到多个方面,包括机器人结构、材料选择和磁力驱动系统的设计等。
1. 机器人结构:微型机器人的结构决定了它的机械性能和操控能力。
常用的机器人结构有单轮、多轮和爬行器等。
设计者需要根据具体应用场景和任务需求选择合适的机器人结构。
2. 材料选择:由于磁力驱动涉及到磁场的感应和响应,机器人的材料选择非常重要。
常见的材料有铁、钢、永磁材料等。
设计者需要根据机器人的磁性需求选择合适的材料。
3. 磁力驱动系统:磁力驱动系统包括电磁线圈、磁铁和控制电路等多个部分。
设计者需要考虑电磁线圈的数量、布局和电流控制等因素,保证磁力的有效传递和机器人的精确操控。
三、磁力驱动微型机器人的控制磁力驱动微型机器人的控制是实现其精确操控的核心。
在控制过程中,需要考虑以下几个方面:1. 磁场生成:通过外部装置产生磁场,对微型机器人进行驱动。
磁场的大小和方向可以通过调节电磁线圈的电流控制,实现对机器人的精确控制。
SMA驱动的全方位轮式蠕动微机器人的设计及研究
1 SMA 弹簧直线驱动器研究 分析了 SMA 螺旋弹簧预变形量与恢复力的大小之间的关系 计
算出 SMA 传热过程中的各时间量的函数关系式 并在此基础上估算 出 SMA 弹簧的加热时间及冷却时间以及 SMA 弹簧保温状态下所需 的 PWM 占空比 分析了 SMA 螺旋弹簧的尺寸效应 2 微机器人结构研究 开发了四方体型双程偏动式驱动器和平行四连杆双向自锁机 构 该驱动器由四根 SMA 及一根普通螺旋弹簧组成的 这种驱动器 及驱动方式不仅增强了微机器人的负载能力 还提高了 SMA 的散热 速度进而提高机器人的蠕动速度 双向自锁机构采用平行四连杆带 此外 文章着重分析
上海交通大学硕士学位论文
SMA 驱动的全方位轮式蠕动微机器人的设计及研究
摘 要
形状记忆合金 SMA 状记忆效应 SME 马达 气缸等
是一种新型功能材料
其特点是具有形
SMA 驱动器在特殊场合可代替传统驱动器 如 结构简单 无噪音 无污染
具有功率质量比大
易于控制等特点 因此广泛用作微小型机器人驱动器 在利用 SMA 作为驱动器的微小型机器人的研制中 构 而由于磨损 国内外多采用多腿式几何结 轮式结构的
润滑及路况适应性等问题难以克服
微机器人 尚未见记载 事实上
在多腿式结构中 各组驱动器动 相反轮式机
Hale Waihona Puke 作会互相牵制 步态控制复杂 行走步距小且速度慢 构则具有承载能力大 结构简单 速度快
易于制造等诸多优点
因此采用轮式蠕动方式必能大大提高微机器人的运动性能 对基于 SMA 驱动的微型机器人的研究具有深远意义 鉴于轮式结构的诸多优势 轮式蠕动微机器人 本实验室于 2002 年研制成功第一代
成功地解决了磨损及润滑问题 且步速可达 不能后退及转弯 在国 我们开发成功第二
医用微型机器人蠕动肠道中的驱动力计算及实验研究
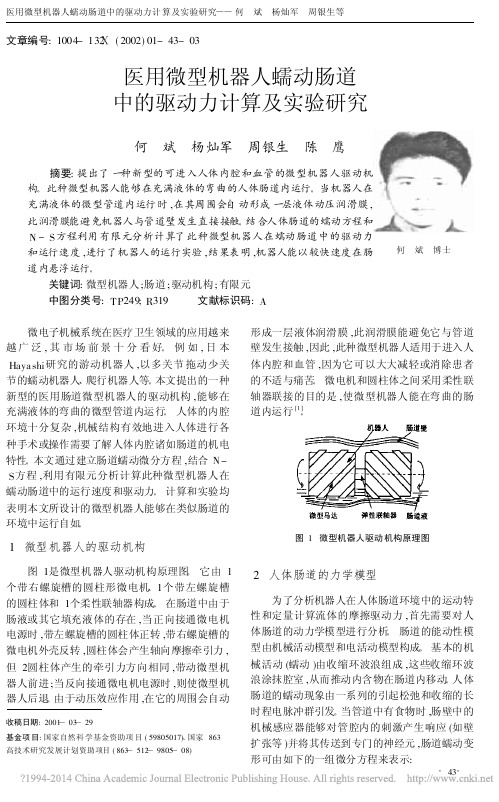
文章编号:1004-132Ⅹ(2002)01-43-03医用微型机器人蠕动肠道中的驱动力计算及实验研究何 斌 博士何 斌 杨灿军 周银生 陈 鹰 摘要:提出了一种新型的可进入人体内腔和血管的微型机器人驱动机构。
此种微型机器人能够在充满液体的弯曲的人体肠道内运行。
当机器人在充满液体的微型管道内运行时,在其周围会自动形成一层液体动压润滑膜,此润滑膜能避免机器人与管道壁发生直接接触。
结合人体肠道的蠕动方程和N -S 方程利用有限元分析计算了此种微型机器人在蠕动肠道中的驱动力和运行速度,进行了机器人的运行实验,结果表明,机器人能以较快速度在肠道内悬浮运行。
关键词:微型机器人;肠道;驱动机构;有限元中图分类号:TP 249;R 319 文献标识码:A收稿日期:2001—03—29基金项目:国家自然科学基金资助项目(59805017)、国家863高技术研究发展计划资助项目(863—512—9805—08) 微电子机械系统在医疗卫生领域的应用越来越广泛,其市场前景十分看好。
例如,日本Haya shi 研究的游动机器人,以多关节拖动少关节的蠕动机器人、爬行机器人等。
本文提出的一种新型的医用肠道微型机器人的驱动机构,能够在充满液体的弯曲的微型管道内运行。
人体的内腔环境十分复杂,机械结构有效地进入人体进行各种手术或操作需要了解人体内腔诸如肠道的机电特性。
本文通过建立肠道蠕动微分方程,结合N-S 方程,利用有限元分析计算此种微型机器人在蠕动肠道中的运行速度和驱动力。
计算和实验均表明本文所设计的微型机器人能够在类似肠道的环境中运行自如。
1 微型机器人的驱动机构图1是微型机器人驱动机构原理图。
它由1个带右螺旋槽的圆柱形微电机、1个带左螺旋槽的圆柱体和1个柔性联轴器构成。
在肠道中由于肠液或其它填充液体的存在,当正向接通微电机电源时,带左螺旋槽的圆柱体正转,带右螺旋槽的微电机外壳反转,圆柱体会产生轴向摩擦牵引力,但2圆柱体产生的牵引力方向相同,带动微型机器人前进;当反向接通微电机电源时,则使微型机器人后退。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文章编号:100220446(2006)0620560205体内微型机器人的全方位旋进驱动特性3张永顺,张凯,张林燕(大连理工大学精密与特种加工教育部重点实验室,辽宁大连 116024)摘 要:提出了一种由外旋转磁场驱动的体内微机器人.它以相邻径向异向磁化瓦状多磁极圆筒形NdFe B永磁体为外驱动器,以机器人内嵌同结构的NdFe B永磁体为内驱动器,外驱动器旋转时产生旋转磁场,通过磁机耦合作用于内嵌驱动器形成机器人驱动力矩,在本体外表面螺纹与流体动压力的作用下,实现机器人在管道内的在线旋进.在建立微机器人游动模型的基础上,以垂直管道为试验环境,研究了机器人的全方位驱动特性,试验结果表明机器人可以实现管道内全方位驱动.关键词:体内微型机器人;旋转磁场;游动特性;全方位驱动中图分类号: TP24 文献标识码: BSp i ra l D r i ve Character isti cs of a M i cro Robot I n si de Human BodyZ HANG Yong2shun,Z HANG Kai,ZHANG L in2yan(Key L aboratory for Precision&N on2traditional M achining of M inistry of Education,D alian U niversity of Technology,D alian116024,China) Abstract:A ne w m icr o r obot inside hu man body driven by exteri or r otating magnetic field is p r oposed.It takes a cylindri2 cal NdFe B multi pole per manentmagnet composed of several neighboring tegular magnetsmagnetized anis otr op ically al ong ra2 dial directi on as exteri or actuat or,and a magnet with the same structure e mbedded inside the r obot body as the inner actua2 t or.The r obot scre ws for ward inside p i pe under the acti on bet w een s p iral rib on the exteri or surface of r obot body and fluid dyna m ic p ressure when r obot r otates by magnetic t orque,which is generated by magnet o2mechanical coup ling fr om r otating exteri or actuat or t o inner one.Based on a ne wly devel oped s wi m m ing mathe matical model,its characteristics of omni2direc2 ti onal drive is studied in the envir on ment of erect p i pe.Experi m ental results show that the r obot can realize omni2directi onal drive. Keywords:m icr o r obot inside hu man body;r otating magnetic field;s wi m m ing characteristics;omni2directi onal drive1 引言(I n troducti on)ME MS技术的发展,使微机器人进入体内执行无创或微创介入医疗作业成为可能.为了安全、可靠地进行肠道内的检查及手术作业,减少病人的痛苦,人们已经研究出微型肠道胶囊内窥镜和胶囊电子药丸.胶囊内窥镜可以无线传输检查图像,电子药丸可以通过在肠道内脉冲放电来医治胃肠疾病.它们均随肠道蠕动来完成整个区域检查与作业,并随排泄物排出体外,其过程安全、可靠,但速度缓慢,效率低下,尤其是错过病变组织时,不能主动返程进行集中局部观察与治疗,使肠道内的一些医疗作业无法完成.为了实现胶囊式机器人的体内作业,有必要对其实施安全有效的主动驱动控制和姿态调整,尤其要求机器人具有全方位驱动功能,这样才能实现机器人的可靠作业.日本Ishiya ma等人利用三轴亥姆霍兹线圈提供空间旋转磁场,通过加载电流控制磁场强度及方向,作用于胶囊内嵌磁体带动其旋转,在胶囊表面螺纹与液体的作用下实现旋进[1,2],通过调整外旋转磁场平面的方向对微机器人进行姿态控制[3,4].但通电线圈所产生的驱动力矩小,驱动不安全,尤其当驱动频率较高时,线圈的能量损耗较大,大大降低了机器人的效率. 第28卷第6期 2006年11月机器人 ROBO T Vol.28,No.6 Nov.,20063基金项目:国家自然科学基金资助项目(60275034);辽宁省自然科学基金资助项目(20021061,20032119).收稿日期:2006-01-13本文提出一种以径向磁化的N 、S 极相间排列的多磁极圆环NdFe B 永磁体为外驱动器,以嵌入胶囊内的同磁极结构NdFe B 永磁体为内驱动器,通过变频调速带动外驱动器转动产生旋转磁场,驱动机器人内嵌磁体旋转,实现体内旋进的驱动控制方法.由于该驱动器产生的旋转磁场强度高达015T,为线圈提供空间旋转磁场强度的100倍,显著提高了驱动力矩.要提高在人体内的实用性与可靠性,机器人必须具备全方位驱动功能,如机器人在肠道内要能克服重力实现快速爬行等.本文在建立机器人螺旋参数与运动特性数学模型的基础上,着重研究了微机器人在垂直封闭管内的游动特性.行走试验表明机器人具有良好的垂直爬行的性能.由于螺旋结构机器人适于在充满大粘度液体的封闭管内环境中游动,因此病人可饮入大粘度无毒透明液体,如糖浆等,使消化道具备机器人驱动的动力媒介与环境.机器人的大驱动力矩与全方位驱动特性使其极有可能作为胶囊内窥镜或施药装置的移动载体应用于人体肠道和血管内的医疗作业.2 机器人结构与外驱动磁场(Robot struc 2ture and its exter i or dr i v i n g magneti c f i eld)图1为研制的螺旋式胶囊微机器人及旋转磁场驱动的示意图,通过变频调速来控制旋转磁场的转速,实现微机器人的旋进速度控制.反向驱动外驱动器,可实现微机器人反向运动.调整外驱动器的空间姿态可以实现微机器人在空间任意方向的运动.图1 外旋转磁场驱动螺旋式微机器人的示意图Fig .1 Illustrati on of a s p iral type m icr o r obot drivenby exteri or r otating magnetic field 外驱动器对机器人内嵌磁体产生的轴向驱动力由两部分组成:(1)当微机器人旋转时,其螺旋结构与管内粘性液体产生动压膜,形成轴向驱动力;(2)调整外驱动器偏离机器人的中心位置,外驱动器通过内驱动器对机器人产生轴向推力.二者与外旋转力矩形成“力旋”,在柔弹性组织内有理想的撑开推进效果.图2为研制的几种不同螺旋参数的机器人模型,为了不损伤柔弹性组织,其外表面缠有由柔软无毒树脂材料制成的螺旋线.图2 螺旋式微机器人样机Fig .2 Pr ot otypes of several kinds of s p iral r obots3 机器人水平运动特性方程的建立(Est ab 2lishm en t of character isti c equa ti on s of hor i zon t a l robot sw i m m i n g)为了分析螺旋表面的压力分布情况,建立如图3(a )所示的坐标系[5],机器人在管内旋转移动时,圆周上某点的绝对运动为周向速度U 和轴向速度V a 的合成运动,在x 、y 方向的投影为: W =U sinθ-V a cos θ V =U cos θ+V a sin θ式中,θ为螺旋升角.将螺旋表面按垂直于螺纹t 2t 的截面展开,螺旋结构参数如图3(a )、3(b )所示,其动压力分布如图3(c )所示.图中,h a 为螺旋槽的高度;c 为微机器人螺旋顶端与管道内壁的径向间隙.设β=ba ,γ=h a c,由雷诺方程建立机器人螺旋外表面的压力特征方程,再根据Navier 2St okes 方程确定流体流动速度分布规律,最终根据表面剪力分布规律确定机器人轴向推力与机器人运动与螺旋几何参量的关系式,求得微机器人所受的液体轴向推进力为[6]:165 第28卷第6期张永顺等: 体内微型机器人的全方位旋进驱动特性 F a =2πμL c 3β(1-β)γ2B C cos θ[r -c (1-γ)](1-β)B +βr (1+γ)3C-(1-β)(r -c γ)c (1+γ)V a -βV a (1)式中,B =(r -c γ)ωr sin θ-V a r cos θ;C =ωr sin θ-V a cos θ;ω为微机器人的转动角速度;r 为微机器人的半径;L 为微机器人的长度.图3 螺旋表面流体的运动与压力分析Fig .3 Analysis on moti on and dynam ic p ressure about liquid on s p iral surface研究表明,当螺旋角θ=45°时,机器人游动速度最大,因此取该螺旋角研究机器人的全方位驱动特性.根据式(1)可得不同转速下F a 与V a 的关系曲线,如图4所示.其中各参数取值如下:θ=45°,β=011,γ=1,c =1mm ,r =515mm ,μ=5Pa 1s ,L =70mm.图4 轴向推进力与游动速度之间的关系Fig .4 Relati onshi p bet w een axial p r opulsive f orceand s wi m m ing s peed 可见,F a 随V a 的增大而减小,V a =0时,F a 最大,微机器人在F a 的作用下沿轴向由静止开始加速游动,随着V a 的逐渐增大,F a 逐渐减小,当F a 减至0时,V a 达到最大值,微机器人运动速度达到最大稳态值.微机器人的游动速度与机器人的转速为线性关系.4 微机器人在垂直管内的游动特性(Est ab 2lish m en t on equa ti on of verti ca l sw i m 2m i n g character isti cs of robot)机器人在水平管内游动时,自身重力对游动特性没有影响;机器人在垂直放置的管内游动时,机器人的重力G 与驱动力F a 的作用线一致,因此重力将对游动特性产生影响.下面分别讨论微机器人在垂直管内向上游动和向下游动时,重力G 对机器人游动特性的影响.4.1 微机器人向上的游动特性驱动微机器人在垂直放置的管内向上游动时,应控制微机器人的旋转方向,使驱动力F a 的方向向上,以克服重力G .如果机器人的螺旋结构参数一定,并假设在重力的作用下,对流体的动态特性没有影响,即F a 与V a 依然满足图4中的F a 2V a 线性关系,那么垂直向上驱动时,式(1)可以写成:F a =f (V a ,n )(2)265 机 器 人2006年11月 机器人所受的合力为:F =F a -G(3) 当F a >G 时,微机器人才启动,沿轴向由静止开始向上游动后,F a 随V a 的增大而减小,当F a 减至与重力G 相等时,合力F =0,其V a 达到最大稳态值,实现匀速向上游动.图5所示为不同转速时,机器人向上游动的F a 2V a 计算曲线.其中微机器人的重力G =0112N (图中的水平虚线).可见,n =33215r/m in 时,F a 等于重力G,机器人刚好克服重力,达到平衡状态,该速度记为n 0,对应的F a 2V a 曲线称为临界启动曲线.当n >n 0时,F a 2V a 曲线在临界启动曲线上方,微机器人才可克服重力,实现向上爬行.F a 2V a 曲线与G 线的交点对应的横坐标值即为在该驱动转速下,机器人在垂直管内的稳定向上游动速度.机器人的启动过程是由纵轴沿F a 2V a 曲线与G 线相交,速度由零达到稳态向上游动速度.图5 微机器人向上游动时的F a 2V a 曲线Fig .5 Relati onshi p bet w een axial p r opulsive force and s wi m m ing s peed when r obot s wi m s upward vertically 显然n 越大,V a 的稳态值越大;当n <n 0时,即F a 2V a 曲线在临界启动曲线下方时,微机器人不能启动,例如图中n =200r/m in 时.4.2 微机器人向下的游动特性当驱动微机器人在垂直放置的管内向下游动时,应控制微机器人的旋转方向,使驱动力F a 的方向向下,与重力G 作用方向一致.如果机器人的螺旋结构参数一定,同理垂直向下驱动时有式(2)成立.微机器人在垂直管内向下驱动时,驱动力向下,称为正向驱动,其驱动转速为正,此时微机器人沿轴向所受的合力为:F =F a +G(4) 向下驱动时满足F ≥0,机器人可以启动.微机器人在垂直管内向上驱动时,驱动力向上,称为反向驱动,其驱动转速为负,在一定反向驱动转速范围内,机器人也可实现向下游动.这是由于向上游动的临界驱动速度为n =-33215r/m in ,因此当向上驱动速度的绝对值小于截止驱动速度的绝对值时,机器人也可以在重力的作用下,实现向下启动.此时微机器人沿轴向所受的合力为:F =G -F a(5) 图6所示为微机器人以不同转速向下驱动的F a 2V a 曲线,G 线为-0112N 的水平线,n =-33215r/m in 时的F a 2V a 曲线称为截止曲线,在其上方,微机器人才能实现向下启动,这些曲线与G 线的交点表示微机器人的稳态游动速度.图6 微机器人向下游动时的F a 2V a 曲线Fig .6 Relati onshi p bet w een axial p r opulsive f orce and s wi m m ing s peed when r obot s wi m s down ward vertically 正向旋转驱动时,机器人沿轴向由静止开始加速向下游动,F a 随V a 的增大而减小,当F a 减至0时,微机器人所受的合力并不为0,而是F =G,故将继续加速向下游动,随着V a 的继续增大,F a 将由0开始沿反向逐渐增大,直至增大到F a =-G 时,合力F 为0,微机器人达到稳态;在反向旋转驱动时,机器人在满足启动条件的情况下,微机器人从静止开始向下加速游动,F a 的绝对值随着V a 的增大而增大(此时F a 为负值),当F a 的绝对值增大到G,即F a =-G 时,合力F 等于0,微机器人达到稳态.365 第28卷第6期张永顺等: 体内微型机器人的全方位旋进驱动特性 5 机器人运动特性的试验研究(Exper i m en 2t a l research on robot sw i m m i n g charac 2ter isti cs)研制了旋转磁场驱动系统和微机器人样机,各项参数如前所述,为了验证上述理论分析结果,分别进行了水平和垂直管道内的游动对比试验,机器人游动试验装置如图7所示.图8和图9分别为水平游动和垂直游动的试验结果.由图8可见,水平游动的游动速度与驱动转速曲线是过原点的一条直线,与理论计算结果一致.(a )水平游动试验(b )垂直游动试验图7 机器人游动试验装置Fig .7 Experi m ental set 2up for r obot s wi m ming图8 微机器人水平游动试验曲线Fig .8 Experi m ental curve when r obot s wi m s horizontally 由图9(a )可见,垂直向上游动速度与驱动转速曲线是过启动转速n 0=33215r/m in 的一条直线,当转速低于或等于启动转速n 0时,微机器人不能启动;由图9(b )可见,垂直向下游动速度与驱动转速曲线是过启动转速n 0=-33215r/m in 的一条直线,当微机器人正转(n >0)或不转(n =0)时,微机器人均能启动;当微机器人反转(n <0)时,只有当转速的绝对值低于启动转速n 0的绝对值时,微机器人才能启动.上述情形均与理论分析结果一致.(a )垂直向上游动(b )垂直向下游动图9 微机器人垂直游动试验曲线Fig .9 Experi m ental curve when r obot s wi m s vertically6 结论(Conclusi on)提出一种新的胶囊型微型机器人的外旋转磁场驱动控制方法,外旋转磁场驱动器采用径向磁化多磁极圆筒形永磁体,具有旋转磁场强、驱动力矩大、动态响应快、安全可靠等优点.试验结果表明,该方法与线圈驱动方式相比,更能节省能源,实用性更好.由于驱动力矩大,机器人与外旋转磁场同步驱动性好,因此显著提高了机器人的可靠性与实用性.(下转第570页)速度趋于稳定的调整时间,减小时滞现象,增强抗干扰能力,在此基础上,测试平稳运动时运动器的爬坡和越障能力.5 结论(Conclusi on)球形运动器设计的主要准则是将球体的转向与直线行走两种运动状态分开实现,这样可以避免两种运动综合作用时产生的运动耦合现象,从而降低了耦合时所带来的力学分析和控制上的难度.通过对运动器进行的动力学分析,得出了其内部各个状态变量的变化规律,为进一步控制奠定了基础.设计的开环控制系统能够实现球形运动器的两个基本运动方式,达到平面上的任何一点,完成精度不高的探测性任务.下一步的工作是实现闭环控制,使球形运动器运动效果更加平稳、灵活.参考文献 (References)[1]Javadi A H A,Mojabi P.I ntr oducing August:a novel strategy f oran omnidirecti onal s pherical r olling r obot[A].Pr oceedings of theI EEE I nternati onal Conference on Robotics and Aut omati on[C].Piscata way,US A:I EEE,2002.3527-3533.[2]B icchi A,Balluchi A,Prattichizz o D,et al.I ntr oducing the“Sphericle”:an experi m ental testbed for research and teaching innonhol onomy[A].Pr oceedings of the I EEE I nternati onal Confer2ence on Robotics and Aut omati on[C].Piscata way,US A:I EEE,1997.2620-2625.[3]Bhattacharya S,Agra wal S K.Spherical r olling r obot:a design andmoti on p lanning studies[J].I EEE Transacti ons on Robotics andAut omati on,2000,16(6):835-839.[4]Hal m e A,Schonberg T,W ang Y.Moti on contr ol of a s phericalmobile r obot[A].Pr oceedings of the19964th I nternati onalWork2shop on Advanced Moti on Contr ol[C].Piscata way,US A:I EEE,1996.259-264.[5]肖爱平,孙汉旭,谭月胜,等.一种球形机器人运动轨迹规划与控制[J].机器人,2004,26(5):444-448.[6]岳明.球形运动器的研究[D].哈尔滨:哈尔滨工业大学,2004.[7]Montana D J.The kine matics of contact and gras p[J].The I nter2nati onal Journal of Robotics Research,1988,7(3):17-31. [8]Xu Y S,Au KW,Nandy G C,et al.Analysis of actuati on and dy2nam ic balancing for a single wheel[A].Pr oceedings of the I EEE/RSJ I nternati onal Conference on I ntelligent Robot and Syste m s[C].Piscataway,US A:I EEE,1998.1789-1794.[9]Abbott M S.Kine matics,Dyna m ics and Contr ol of Single2Axle,T wo2W heel Vehicles(B i p lanar B icycles)[D].V irginia,US A:V irginia Polytechnic I nstitute and State University,2000.[10]Ca m icia C,Conticelli F,B icchi A.Nonhol onom ic kinematics anddyna m ics of the s phericle[A].Pr oceedings of the I EEE/RSJ I nter2nati onal Conference on I ntelligent Robots and System s[C].Piscat2a way,US A:I EEE,2000.805-810.作者简介:邓宗全(19562),男,硕士,教授,博士生导师.研究领域:宇航空间机构,特种机器人.岳 明(19752),男,博士生.研究领域:球形机器人,月球车.(上接第564页) 以机器人轴向推力与螺旋参量的数学模型为基础,对全方位驱动特性进行了理论分析,并以充满大粘度流体的垂直放置的有机玻璃封闭管为试验环境,对机器人的全方位的驱动特性进行了研究.理论与试验结果表明,基于该旋转驱动结构的机器人可以在大粘度液体内实现全方位行走,因此机器人具有很好的实用性与可靠性,该机器人在人体内,如肠道和血管内,具有良好的运动性能,为实现人体内的医疗作业奠定了基础.参考文献 (References)[1]Sendoh M,Ishiya ma K,A rai,K2I1Fabricati on of magnetic actuat orfor use in a cap sule endoscope[J].I EEE Transacti ons on Magne2 tics,2003,39(5II):3232-3234.[2]Sendoh M,Suda Y,Ishiyama K,et al.Fabricati on of magnetic ac2tuat or for use in col on endoscope[A].Pr oceedings of the I nterna2 ti onal Sy mposium on M icr omechatr onics and Human Science[C].Ne w York,US A:I EEE,2003.165-170.[3]Sendoh M,Ishiya ma K,A rai K I.D irecti on and individual contr olof magnetic m icr omachine[J].I EEE Transacti ons on Magnetics, 2002,38(51):3356-3358.[4]Ishiyama K,Sendoh M,A rai K.I.Magnetic m icr omachines formedical app licati on[J].Magnetis m and Magnetic Materials,2002, 2422245(1):41-46.[5]Lkeuchi K I,Yoshinaka K,Hashi m ot o S.Locomoti on of medicalm icr o r obotwith s p iral ribs using mucus[A].Pr oceedings of the7thI nternati onal Sy mposium on M icr o Machine and Human Science[C].Piscata way,US A:I EEE,1996.217-222.[6]Pinkus O,Sternlicht B.Theory of Hydr odyna m ic Lubricati on[M].Ne w York:McGraw2H ill I nc,1961.作者简介: 张永顺(19652),男,博士,副教授.研究领域:机电控制及自动化,机器人与微型机器人技术,无缆游动微型机器人的外磁场驱动控制,医疗微型机器人等.。