Artemis_ATP08_and_ME'scope_VES锤击法模态分析操作指南-牛维2012
软件进阶培训--ArtemiS-ATP03

ArtemiS 之ATP03模块
* ATP03可以实现阶次跟踪滤波器功能。在属性中激活Tracking,选择 需要滤波的Tracking Order。
ArtemiS 之ATP03模块
* ATP03可以支持ArtemiS实现更多随转速变化的计算功能。如下图所示 Order、Loudness vs. rpm、Octave vs. rpm……
ArtemiS 之ATP03模块
ArtemiS Tool PackS 工具包
ArtemiS 之ATP03模块
ATP03模块概述:
1. 支持ArtemiS实现更多随转速变化的计算功能
2. 支持ArtemiS实现扭振的计算功能 3. 支持ArtemiS实现阶次跟踪滤波器功能
ArtemiS 之ATP03模块
* ArtemiS采用32-bit浮emiS 之ATP03模块
* ATP03可以使脉冲、速度信号编码记录在音频信号中,而在ArtemiS中可以 进行独立的脉冲、速度分析。
ArtemiS 之ATP03模块
* 进行“RPM vs. Time”分析,是从音频信号中分离出RPM脉冲信号 ,绘制 RPM随时间变化的曲线。
ArtemiS 之ATP03模块
* ATP03可以支持ArtemiS实现扭振的计算功能。
ArtemiS 之ATP03模块
*选择属性,在Pulse data channel里可以进行参考通道设置;选择哪个通道, 则该通道即为参考通道。
例如计算Level vs. rpm,参考通道设 置为速度通道时,则计算出Level vs. speed;参考通道设置为角度时,则 计算出Level vs. Phi曲线
Artemis_ATP08_and_ME'scope_VES锤击法模态分析操作指南-牛维2012

FRF测试,参考的选择
H( f ) X ( f ) / F( f )
Response( roving response a column of FRF)
Excitation(roving Hammer a row of FRF)
H1
G fx Gff
F
k 1 m k 1
m
*
( f )X ( f )
设臵启动为Integrated Recorder
连接并检测硬件连接,点击上图 中的图标,打开采集界面
FRF测试
选择前端,根据最大关心频率设臵主采样频率
进入Analyze界面
FRF测试
通道设臵:
1、根据配臵选择开启通道,配臵传感器,量程及DOF 量程需要反复调试,以保证信号的最大信噪比; 2、如果为多参考输入出,注意DOF的选择;
幅值
1阶模态 2阶模态 3阶模态 梁 加速度
Force Force Force Force Force Force Force Force Force Force 力Force
试验模态激励:
1、步进式正弦激励法:从最低频率到最高频率选定足够数目离散的频率值, 每次使用一个频率给出激励信号,测出该激励的稳定响应,在进行下一个频率;
频响函数 固有频率、阻尼、振型
模态试验的基本假设
1、振动系统是线性的,满足叠加原理 任何输入组合引起的输出等于各自输出的组合,在模态试验中首 先检查结构的线性动态特性
2、振动系统是时不变的 结构动态特性不随时间变化的 3、可观测性假设 系统的动态特性所需要的全部数据都是可以测量的,这对选择响 应的自由度非常重要 4、振动系统遵从Maxwell互易性原理 在A点的输入所引起B点的响应等于B点的相同输入所引起的A点的 响应
Artemis模块功能简介

ATP 17-ArtemisIRIG-B 时间代码模块(代码 4617)
根据 IRIG-B 时间代码标准(现有的绝对时间信息)记录信息的扩充模块 具有不同前后端的进行数据记录的数据采集模块
ADA-Lite-Artemis 数据采集模块(代码 4620)
特性
频率响应函数 脉冲响应函数 自相关(与 ATP-03 相结合,可作为控制输入的函数) 互相关((与 ATP-03 相结合,可作为控制输入的函数) 相干
ATP 06-Artemis 高级心理声学模块(代码 4606)
进行高级心理声学研究的 Artemis 扩展模块。
特性
听音模式 HSA 由听音模式获取心理声学参量
ATP 10-Artemis 发生器与编辑器模块(代码 4610)
3
产生合成信号及编辑信号序列的 Artemis 扩充模块
特性
信号和函数发生器 信号编辑器
ATP 11-Artemis 高级文档模块(代码 4611)
对测量和分析结果完成高级自动存档的 Artemis 扩充模块
ATP 12-Artemis 数据库模块(代码 4612)
ATP 04-Artemis 倍频程分析模块(代码 4604)
进行 1/n 倍频程分析的 Artemis 扩充模块
特性
2
1/n 倍频程频谱(数字滤波器符合 IEC 和 ANSI S1.11 标准) 多重谱
ATP 05-Artemis 系统分析模块(代码 4605)
研究系统特性的 Artemis 扩充模块
ATP 07-Artemis 高级分析模块(代码 4607)
对信号进行进一步分析的 Artemis 扩充模块
锤击法模态测试流程

锤击法模态测试流程锤击法模态测试可是个挺有趣的事儿呢,我来给你好好讲讲这个流程哈。
一、准备工作。
咱们先得把要用的设备都找齐喽。
像力锤这可是关键的家伙事儿,就像厨师的锅铲一样重要。
它有不同的锤头,咱得根据测试对象的特点来挑。
然后还有加速度传感器,这就像是测试对象的小耳朵,能把那些振动的信息都收集起来。
再就是数据采集仪啦,它负责把传感器听到的那些信息都记录下来呢。
除了设备,测试对象也得准备好呀。
要把测试对象放在一个相对稳定的地方,不能让它在测试的时候晃来晃去的,不然测出来的数据可就乱套了。
比如说要是测个小零件,就得把它稳稳地固定在一个夹具上。
要是测个大家伙,像大型机械结构啥的,那也得保证它周围没有太多干扰的东西。
二、传感器的安装。
传感器安装可是个细致活。
咱们得找个合适的地方把加速度传感器贴上去或者固定好。
这个地方呢,最好是能比较准确地反映测试对象的振动情况。
比如说如果是个梁结构,那可能在梁的中间或者两端安装传感器就比较合适。
安装的时候要小心哦,不能把传感器弄坏了。
要是不小心把传感器搞坏了,就像战士上战场没带枪一样,整个测试就没法好好进行啦。
而且要保证传感器和测试对象接触良好,这样它才能准确地感受到振动呢。
三、力锤的敲击。
力锤敲击这一步很有讲究呢。
咱们拿力锤敲测试对象的时候,不能乱敲一气。
要选择合适的敲击点,一般来说呢,要均匀地在测试对象的不同位置敲。
敲的时候力度也得控制好,不能太轻,太轻了传感器可能都感觉不到振动的变化;也不能太重,太重了可能会对测试对象造成损伤,就像你打一个小宠物,下手太重可不行。
而且每次敲击的方向也要尽量保持一致,这样测出来的数据才更有可比性。
四、数据采集。
当我们用力锤敲的时候,数据采集仪就开始工作啦。
它会把传感器传过来的振动信号和力锤敲击的力信号都记录下来。
这个过程就像是一个小秘书在认真地做会议记录一样,不能出一点差错。
要保证采集到的数据是完整的,没有丢失或者错误的部分。
在采集数据的时候呢,可能还需要设置一些参数,像采样频率这些,要根据测试对象的特性和测试的要求来设置好,不然采集到的数据可能就不准确啦。
一种快速方便的试验模态分析方法——锤击法
一种快速方便的试验模态分析方法——锤击法摘要:本文主要介绍了一种快速方便的试验模态分析方法——锤击法。
该方法通过对结构体系进行钝化处理,利用实验锤击对结构进行激励,利用加速度传感器记录结构动力响应,通过对响应波形进行分析,可以得到结构的自然频率、阻尼比和模态形式等特征参数。
该方法简单易行,不需要复杂的仪器和设备,适用于大多数简单工程结构的模态分析。
文章还对该方法的优缺点进行了讨论,并提出了进一步优化的建议。
关键词:试验模态分析;锤击法;自然频率;阻尼比;模态形式Abstract:This paper mainly introduces a fast and convenient experimental modal analysis method-hammering method. This method passivates the structural system, uses experimental hammering to stimulate the structure, and uses an acceleration sensor to record the dynamic response of the structure. By analyzing the response waveform, characteristic parameters such as the natural frequency, damping ratio, and mode shape of the structure can be obtained. This method is simple and easy to implement, does not require complex instruments and equipment, and is suitable for modal analysis of most simple engineering structures. The article also discusses the advantages and disadvantages of this method and proposes suggestions for further optimization.Keywords: experimental modal analysis; hammering method; natural frequency; damping ratio; mode shape一、概述试验模态分析是工程结构振动分析的重要方法之一,其目的是获取结构的自然频率、阻尼比和模态形式等特征参数,为结构设计、优化、调试及故障诊断提供依据。
一种快速方便的试验模态分析方法锤击法

的颡 响 函 数 可 以 写成 :
= 耋[ 一 ]
㈣
它 表示 自 由度 6 处 激 励 ,自由度 “n 处 的 响 应 ,其 互 易关 系 也 成立 ,即
一
=
=
由 于 方 程 (6)中 每 一 模 态 仅 用 2个 复 参 数来 描 述 频 响 函 数 ,因 此 该 方 程 在 模 态 分 析 中 特 别 有 用 。利 用 方 程 (6),对测 量 得 到 的 频 响 数 据 采 用 曲线 拟 合方 法 即 可 获 得 第 r阶 模 态 的 极 点
和 留数 尼 (n.6)的数值 .实际上 ,一组测量 得到的频响 函数确定 了频响矩 阵中的一行或 一 列 。对 于 每 一 个 频 响 函 数 进行 曲线 拟 台 即 可 得 到 留数 矩 阵[R ]中 的 相 应 行 或 列 ,由 此 可 求 出 模 态 向量 {舜}。
因此 ,根 据 方 程 (6),通 过 对 测 量到 的频 响 数据 进 行 曲线 拟 合 即 可 直 接 获 得 被 测结 构 的 模 态模 型 ,而 每 一模 态 的 固 有 频 率 和 阻 尼 比 可 通 过 方 程 (4)中 的极 点 值 计 算 出 来 。同 时 ,模 态 向 量 也 可 由 留数 矩 阵 中的 一 行 或 一 列 推 导 出 来 。留 数 矩 阵和 频 响 矩 阵都 是对 称 的 。即
求 敲 击 力大 小 适 当 。力 太 小 就 会 降 低 信 噪 比 ,而 力太 大
则会 使结构出现非线性 响应 或信号 失真 。但是 随着先进
信 号分 析 仪 的 出现 ,锤 击 法 的 许 多 不 足 是 可 以 克 服 的 ,
如 对 信 号 加 窗 、平 均 和 弱 小 及 太 大 信 号 的 剔 除等 处 理 就
某风扇振动破坏的有限元模态分析及试验验证
某风扇振动破坏的有限元模态分析及试验验证李华山;吴晗;周强;冯健美;彭学院【摘要】Aiming at the problem of an unexpected fracture occurred on the blade of a fan used for the motor cooling of a natural gas reciprocating compressor unit for an offshore, a finite element model was established to analyze the natural frequencies and modal shape, and a test was carried out to validate the simulated results. It was indicated that the analytical results agreed well with the experimental modal data. The first order natural frequency of the fan was close to 3 times excitation frequency. The third natural fre-quency was close to 6 times excitation frequency and the corresponding mode shape was combinations of bending and torsional vi-bration, which consequently contributed to low-frequency resonance and pre-mature failure of the fan. The results of harmonic re-sponse analysis showed that the regions of stress concentration were exactly consistent with the fractures on the fan.%针对某海洋平台天然气往复压缩机组中高压电机外风扇破裂问题,对风扇进行有限元振动模态分析,计算其固有频率和振型,同时通过试验模态测试验证了计算结果.模态结果表明,试验模态测试与有限元计算结果吻合良好;风扇1阶固有频率与转速3倍频接近,3阶固有频率与6倍频接近,容易引起低阶共振,且表现为弯曲和扭转的复合振动模态,是导致风扇破裂的主要原因.谐响应结果表明,风扇应力集中区域与风扇出现裂纹位置一致.【期刊名称】《压缩机技术》【年(卷),期】2016(000)006【总页数】5页(P34-37,41)【关键词】风扇;振动模态;有限元;模态试验【作者】李华山;吴晗;周强;冯健美;彭学院【作者单位】海洋石油工程股份有限公司特种设备公司,天津 300452;西安交通大学能源与动力工程学院,陕西西安 710049;西安交通大学能源与动力工程学院,陕西西安 710049;西安交通大学能源与动力工程学院,陕西西安 710049;西安交通大学能源与动力工程学院,陕西西安 710049【正文语种】中文【中图分类】TH457;O242.21振动模态分析作为研究结构动力特性的一种方法,在工程振动、故障诊断问题的分析和解决过程中,发挥着重要的作用[1]。
晶钻模态分析软件系列三锤击法模态实验
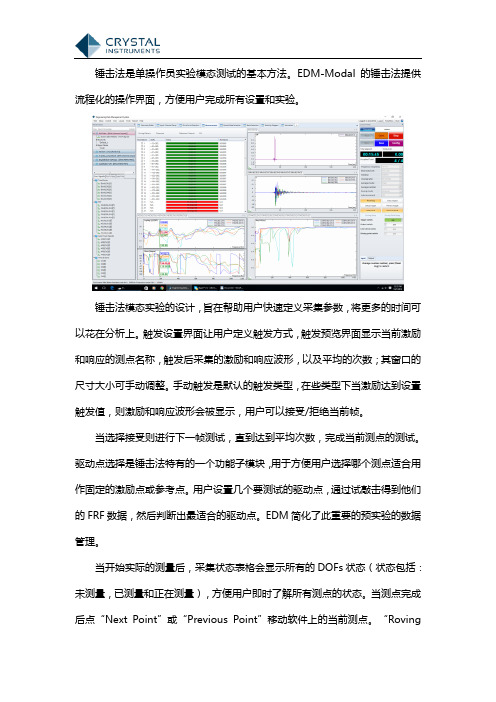
锤击法是单操作员实验模态测试的基本方法。
EDM-Modal 的锤击法提供流程化的操作界面,方便用户完成所有设置和实验。
锤击法模态实验的设计,旨在帮助用户快速定义采集参数,将更多的时间可以花在分析上。
触发设置界面让用户定义触发方式,触发预览界面显示当前激励和响应的测点名称,触发后采集的激励和响应波形,以及平均的次数;其窗口的尺寸大小可手动调整。
手动触发是默认的触发类型,在些类型下当激励达到设置触发值,则激励和响应波形会被显示,用户可以接受/拒绝当前帧。
当选择接受则进行下一帧测试,直到达到平均次数,完成当前测点的测试。
驱动点选择是锤击法特有的一个功能子模块,用于方便用户选择哪个测点适合用作固定的激励点或参考点。
用户设置几个要测试的驱动点,通过试敲击得到他们的FRF数据,然后判断出最适合的驱动点。
EDM简化了此重要的预实验的数据管理。
当开始实际的测量后,采集状态表格会显示所有的DOFs状态(状态包括:未测量,已测量和正在测量),方便用户即时了解所有测点的状态。
当测点完成后点“Next Point”或“Previous Point”移动软件上的当前测点。
“RovingSetup”,可集中设置游击方式,每个通道对应的测点和方向。
锤击法实验过程一个常见的问题是会出现“double hit”。
我们提供了自动检测“double hit”的过程,让用户自动或手动拒绝有双击的敲击。
锤击法实验采集的结果会自动添加到模态分析的数据选择模块,这样模态数据采集和分析可无缝对接。
★EDM Modal 锤击法模态实验主要特征如下:①直观的流程化操作过程。
②几何模型贯穿整个测试过程。
③响应和激励两种游击方式。
④自动或手动移动测点。
⑤自动或手动触发模式。
⑥可变尺寸的触发观览窗口。
⑦双击锤击识别,开/关,自动/手动拒绝。
⑧驱动点设置。
⑨测试状态声音和图形反馈H1,H2,H3和Hv方式计算FRF 测点测试状态显示表格。
★EDM Modal模态支持的功能如下:①几何模型的创建/编辑/导入/导出/动画。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FRF测试
用锤击法产生激励脉冲信号,适合于中、小型和低阻尼 结构的激励。顶帽与试验结构发生冲击接触时,传递给 结构的冲击力近似于正弦函数,其频谱如下图,fc为截止 频率。
FRF测试
三种不同顶帽的波形图、适用频率范围、脉冲宽度 和输入力的范围。 根据被测对象,选择不同的顶帽。
顶帽 钢帽+质量 频率范围 0~7kHz 0~4.5kHz 尼龙帽+质量 0~2kHz 0~1.3kHz 橡胶帽+质量 0~500Hz 0~340Hz 脉宽 0.2ms 0.23ms 0.57ms 0.76ms 2.7ms 3.1ms 100~700N 300~1000N 范围 500~5000N
1 0m 1 m 0 200 400 600 800 [H z] 1 k 1 ,2k 1 ,4k 1 ,6k
1 00m
输入
[N ] 1 1 00m
A uto spectrum (Excit atio n) - Input Wo rking : Input : Input : FF T A nalyzer
根据约束状态: • 自由模态:被测对象自由约束; • 工作模态:被测对象实际约束; 根据FRF的获得方法: • 人为可控的激励的FRF; • 采用自然状态下的激励的OMA; 有无阻尼: • 实模态,振型同时达到最大值或最小值; • 复模态,振型中点存在过度;
模态试验研究
对于机械系统(结构)动力学特性:
* F ( f )F ( f )
G H 2 xx Gxf
X X
k 1 k 1 m
m
*
( f )X ( f ) ( f )F ( f )
*
FRF测试(H估计选择)
1、只要存在噪声干扰,相干函数总小于1,相干函数可以作为估计结果的一种评价。经多 次平均,随即噪声干扰造成的估计误差因此下降,相干函数提高,频响函数曲线趋于 平滑。但当平均次数达到一定程度后,相干函数不太提高单随机误差能随平均次数的 正价而下降
0
-1 k -2k 0 40m 80m 1 20m [s] 1 60m 200m 240m
1 0m
1 m 1 00u 0 200 400 600 800 [H z] 1 k 1 ,2k 1 ,4k 1 ,6k
频率响应函数
脉冲响应函数
[N ] 200 1 00
Time(Excitatio n) - Input Wo rking : Input : Input : FF T A nalyzer
FFT
输出
[m/s 瞉 1 0 1
频域
A uto spectrum (Respo nse) - Input Wo rking : Input : Input : FF T A nalyzer
时域
逆 FFT
1 00m
[(m/ Frequency s?/N ] Respo nse H 1 (R espo nse,Excitatio n) - Input (M agnitude) Wo rking : Input : Input : FF T A nalyzer 1 0
模态试验的基本假设
模态试验开始时,首先要通过试验检查这四个基本假设:
第一个假设一般用调节力幅比较频响函数; 第二个假设一般是考虑激振与传感器附加质量对系统频响函数影响 第三个假设是对响应测点布臵数量 第四个假设是测量频响函数对比(A/B B/A)
试验软、硬件设备
加速度计
Artemis ATP08
FRF测试
为各通道设臵参考通道及窗函数,并确认传感器信息
1、力锤通道:Ref.Ch.为自身,Window为 Transient
2、响应通道:Ref.Ch.为力通道,Window为 Exponential 确认好传感器参数,及Calculator设臵,保存 设臵。
FRF测试
触发设臵
选择触发Channel为力锤; Mode为Rising Slope; Threshold:有两种方式%比或数值,保持在设臵满量程的20%为佳; 预触发时间:根据力锤的锤头和采样频率进行设臵;保证脉冲信号采 集的完整性,并于Transient窗和Expositional窗的T0开始时间一致。
Hv
H1 H2
H 4 H1 H 2
H 3 ( H1 H 2 )
H 2 H 3 H 4 H1
输入窗函数选择
1, t 1.2 1 W f (t ) [1 cos t (t 1.2 )],1.2 t 1.8 2 0, t 1.8
逐DOF进行FRF测试 频率响应函数 力锤或者激振器激励 定义相干函数,自谱等用 于验证
3. 曲线拟合
4. 验证
匹配测试结果与网格点 频率 阻尼 留数 (模态振型)
MAC (模态臵信准则) 模态臵信因子 相位分布 模态参与因子 ........
频率响应函数
[m/s 瞉 80 40 0 -40 -80 0 40m 80m 1 20m [s] 1 60m 200m 240m Time(R espo nse) - Input Wo rking : Input : Input : FF T A nalyzer
2、自动正弦慢扫描激励:使用自动控制的方法使激励信号的频率缓慢而连续 变化,从低到高扫过所关心的频率;
3、快速扫频正弦激励:属于瞬态激励形式,频率从指定的低频到指定高频的 按一定规律连续变化的正弦信号,扫频一次Chirp
4、冲击激励(比如:力锤,爆破脉冲等)
5、纯随机激励,激励与响应加Hanning窗,进行多次平均减少泄露; 6、伪随机激励:在一定频率范围内其幅频特性为常数,其相频特性随机均匀 分布的周期信号,保证谱线间隔应比半功率带宽小的多; 7、周期随机激励:由对段不相关伪随机激励组成(比纯随机和伪随机所花时 间多,但比正弦慢扫描快; 8、瞬态随机激励(burst random)
幅值
1阶模态 2阶模态 3阶模态 梁 加速度
Force Force Force Force Force Force Force Force Force Force 力Force
试验模态激励:
1、步进式正弦激励法:从最低频率到最高频率选定足够数目离散的频率值, 每次使用一个频率给出激励信号,测出该激励的稳定响应,在进行下一个频率;
FRF测试,参考的选择
H( f ) X ( f ) / F( f )
Response( roving response a column of FRF)
Excitation(roving Hammer a row of FRF)
H1
G fx Gff
F
k 1 m k 1
m
*
( f )X ( f )
Artemis ATP08 & ME’scope VES
锤击法模态分析操作指南
牛维 2012
模态分类
根据获得模态的方法的不同: 1)计算模态 -由有限元计算的方法获得
模态分类
2)试验模态-通过试验将系统输入输出信号经过参数识别获得
识别出的频率和阻尼比 振型
为什么做模态测试
• 改进有限元模型 –在原形样机上通过测试进行验证 –通过引入阻尼来改进有限元模型 • 故障诊断 –降低过大的振动水平 –确保共振远离激励频率 模态测试 • 仿真“假如。则。。” 首先利用在飞机工业 –确定载荷 今天也广泛的应用于汽车工业和许多 其他工业 –复杂激励下结构的响应 –结构动力学修改 • 结构综合分析 –预测组装子部件或总成的动力学行为
FFT
240m
0
-1 00 -200 0 40m 80m 1 20m [s] 1 60m 200m
输出 运动 H(w) = = 输入 力
响应 = 激励
激励技术
力锤激励
一般激励移动力锤
输入
激振器激励
一般用于多通道响应 或者响应点可以移动的情况
输出
输入 输出
• 小的各向同性结构 • 支持快速的多参考技术 • 快速的方法 – 不需要固定设备
0 200 400 600 800 [H z] 1 k 1 ,2k 1 ,4k 1 ,6k
[(m/ s?/N Impulse /s] R espo nse h1 (R espo nse,Excitatio n) - Input (R eal P art) Wo rking : Input : Input : FF T A nalyzer 2k 1 k
频响函数 固有频率、阻尼、振型
模态试验的基本假设
1、振动系统是线性的,满足叠加原理 任何输入组合引起的输出等于各自输出的组合,在模态试验中首 先检查结构的线性动态特性
2、振动系统是时不变的 结构动态特性不随时间变化的 3、可观测性假设 系统的动态特性所需要的全部数据都是可以测量的,这对选择响 应的自由度非常重要 4、振动系统遵从Maxwell互易性原理 在A点的输入所引起B点的响应等于B点的相同输入所引起的A点的 响应
FRF测试(H估计选择)
2、在只存在响应端干扰噪声时,经过足够次数的平均,H1估计趋于正确值H,H2估 计的误差却不能因平均而减少,将给出含有较大误差的结果; 3、只存在输入端的测量干扰噪声时,经过多次平均,H2估计趋近于H,而H1估计误 差不会因平均而减少将给出含有较大误差的估计值; 4、一般来说,在反共振点附近,因为响应信号较小,信噪比小,相干函数将较低。 H1估计将比H2估计好一些。而在共振点附近,力信号的细微差别会对响应有较大 影响。因此,H2的估计会比H1估计好。然而,无论是哪一种估计,在这两处,相 干函数都会比较小,在反共振区相干函数降低的更为明显。H2估计在处理共振区 时更好。 5、H1和H2的估计都是有偏估计。H1为欠估计而H2为过估计。