2009年江苏大学考研机械原理真题
机械原理考研历年真题第一章
第一章:机构的自由度一:填空题1,(08 同济大学)某平面基本杆组有四个构件,其低副数为()2,(西安工业学院05)一个平面运动副最多提供()个约束,最少提供()约束。
3,在平面机构中,一个运动副引入的约束数的变化范围是()。
4,机构具有确定运动的条件是自由度()而且机构的原动件数目()机构自由度数目。
5,(04 西北工大)在机构中,原动件指的是()。
机架指的是()。
从动件指的是()。
6,(04 重大)机构具有确定运动的条件是();根据机构的组成原理,任何机构都可以看成是由(),()和()组成。
7,(重大07)在平面机构中若引入一个高副将带入个约束,而引入一个低副将带入个约束。
8,(重大07)做平面运动的构件自由度为,平面机构的自由度为9,(江苏大学09)零件和构件的区别在于:零件是单元,构件是单元。
10,(江苏大学09)平面机构自由度计算公式F=3n-2p 5-p 4 n 指,p5指,p4指。
11,(江苏大学08 )平面机构组成原理表明:机构的组成就是把若干个自由度为零的联接到和机架上。
12,(江苏大学07)平面机构由机架、、组成。
13,(江苏大学06)平面机构中运动副按接触方式是面接触还是点接触,可分为及两类。
14,(江苏大学05)平面机构运动简图的比例尺是指长度与长度之比。
15,(江苏大学10)两构件之间只作平面相对转动的运动副称为,该运动副引入个约束;齿轮副属于(高副或低副),引入个约束。
16·组成机构的要素是和;构件是机构中的单元体。
17· 具有等三个特征的构件组合体称为机器。
18· 机器是由所组成的。
19· 机器和机构的主要区别在于。
20·从机构结构观点来看,任何机构是由三部分组成。
运动副元素是指 。
构件的自由度是指; 机 构的自由度是两 构件 之 间 以 线接 触所 组 成 的平 面运 动副 ,称为 副, 它产 个 约束, 而 保留 了 个 自由 度。
江苏大学研究生机械原理复习题
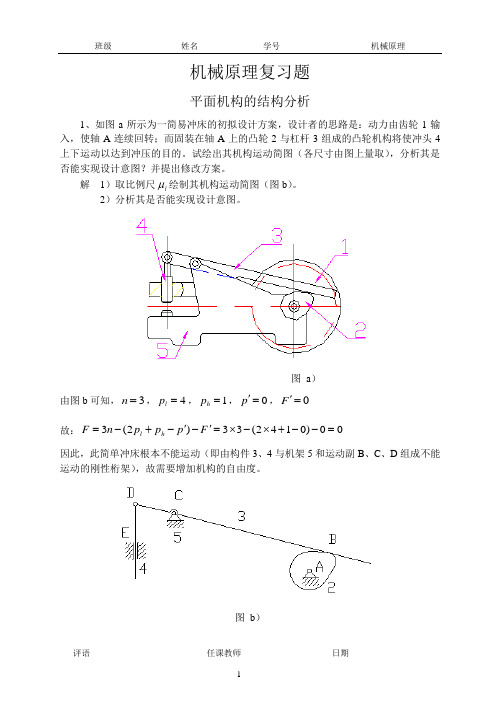
机械原理复习题平面机构的结构分析1、如图a 所示为一简易冲床的初拟设计方案,设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析其是否能实现设计意图?并提出修改方案。
解 1)取比例尺l μ绘制其机构运动简图(图b )。
2)分析其是否能实现设计意图。
图 a ) 由图b 可知,3=n ,4=l p ,1=h p ,0='p ,0='F 故:00)0142(33)2(3=--+⨯-⨯='-'-+-=F p p p n F h l因此,此简单冲床根本不能运动(即由构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架),故需要增加机构的自由度。
图 b )3)提出修改方案(图c )。
为了使此机构能运动,应增加机构的自由度(其方法是:可以在机构的适当位置增加一个活动构件和一个低副,或者用一个高副去代替一个低副,其修改方案很多,图c 给出了其中两种方案)。
图 c1) 图 c2)2、试画出图示平面机构的运动简图,并计算其自由度。
图a )解:3=n ,4=l p ,0=h p ,123=--=h l p p n F图 b )解:4=n ,5=l p ,1=h p ,123=--=h l p p n F3、计算图示平面机构的自由度。
将其中的高副化为低副。
机构中的原动件用圆弧箭头表示。
3-1解3-1:7=n ,10=l p ,0=h p ,123=--=h l p p n F ,C 、E 复合铰链。
3-2解3-2:8=n ,11=l p ,1=h p ,123=--=h l p p n F ,局部自由度3-3 解3-3:9=n ,12=l p ,2=h p ,123=--=h l p p n F4、试计算图示精压机的自由度解:10=n ,15=l p ,0=h p 解:11=n ,17=l p ,0=h p13305232=⨯-+⨯='-'+'='n p p p h l 26310232=⨯-⨯='-'+'='n p p p h l0='F 0='FF p p p n F h l '-'-+-=)2(3 F p p p n F h l '-'-+-=)2(310)10152(103=--+⨯-⨯= 10)20172(113=--+⨯-⨯=(其中E 、D 及H 均为复合铰链) (其中C 、F 、K 均为复合铰链)5、图示为一内燃机的机构简图,试计算其自由度,并分析组成此机构的基本杆组。
2009年同等学力申硕机械工程真题
2009年同等学力申硕机械工程真题(总分:260.00,做题时间:180分钟)一、考生须知 (总题数:1,分数:0.00)二、第一部分必考题(两组,共60 分) (总题数:4,分数:8.00)1.方块图包含了与系统 1有关的信息,与系统的 2无关。
(分数:2.00)填空项1:__________________ (正确答案:动态性能)填空项1:__________________ (正确答案:物理结构)解析:2.传递函数反映系统本身的 1特性,它只与系统本身的 2有关,与 3无关。
(分数:3.00)填空项1:__________________ (正确答案:动)填空项1:__________________ (正确答案:参数)填空项1:__________________ (正确答案:外界输入)解析:3.顺馈校正的特点是在干扰引起 1之前就对它进行 2补偿。
(分数:2.00)填空项1:__________________ (正确答案:误差)填空项1:__________________ (正确答案:近似)解析:4.在控制系统中,当输入信号与 1不相等时,比较装置就会出现误差信号。
(分数:1.00)填空项1:__________________ (正确答案:反馈信号)解析:三、简答题(本大题共4 小题,每小题3 分,共12 分)(总题数:4,分数:12.00)5.简述求传递函数的一般步骤。
(分数:3.00)__________________________________________________________________________________________ 正确答案:(①确定系统的输入和输出;②列出微分方程;③初始条件为零,对各微分方程取拉氏变换;④求系统的传递函数。
)解析:6.何谓线性系统?其最重要特性是什么?(分数:3.00)__________________________________________________________________________________________ 正确答案:(若系统的数学模型表达式是线性的,则这种系统就是线性系统。
江苏大学《855结构力学》考研专业课真题试卷
海天课堂中国考研专业课辅导知名品牌
江苏大学考研专业课真题试卷
855结构力学
2006年《855结构力学》专业课真题试卷
2007年《855结构力学》专业课真题试卷
2008年《855结构力学》专业课真题试卷
2009年《855结构力学》专业课真题试卷
2010年《855结构力学》专业课真题试卷
2011年《855结构力学》专业课真题试卷
2012年《855结构力学》专业课真题试卷
2013年《855结构力学》专业课真题试卷
2014年《855结构力学》专业课真题试卷
2015年《855结构力学》专业课真题试卷
2016年《855结构力学》专业课真题试卷
2017年《855结构力学》专业课真题试卷
2018年《855结构力学》专业课真题试卷。
江苏大学机械设计2009--2010学年期末试题(附答案)
机械设计试题(A )卷(闭卷)2009--2010学年第一学期学号:姓名:一、填空题(每空1分共31分)1、当一零件受脉动循环变应力时,则其平均应力是其最大应力的2、三角形螺纹的牙型角α=,适用于,而梯形螺纹的牙型角α=,适用于。
3、螺纹连接防松,按其防松原理可分为防松、防松和防松。
4、带传动在工作过程中,带内所受的应力有、和,最大应力发生在。
5、链传动设计时,链条节数应选数(奇数、偶数)。
链轮齿数应选数;速度较高时,链节距应选些。
6、根据齿轮设计准则,软齿面闭式齿轮传动一般按设计,按校核;硬齿面闭式齿轮传动一般按设计,按校核。
7、在变速齿轮传动中,若大、小齿轮材料相同,但硬度不同,则两齿轮工作中产生的齿面接触应力,材料的许用接触应力,工作中产生的齿根弯曲应力,材料的许用弯曲应力。
、效率和效率。
其中啮合效率η8、蜗杆传动的总效率包括啮合效率η1= ,影响蜗杆传动总效率的主要因素是效率。
19、轴按受载荷的性质不同,分为、、。
10、滚动轴承接触角越大,承受载荷的能力也越大。
二、单项选择题(每选项1分,共11分)1、循环特性r=-1的变应力是应力。
A.对称循环变 B、脉动循环变 C.非对称循环变 D.静2、在受轴向变载荷作用的紧螺柱连接中,为提高螺栓的疲劳强度,可采取的措施是( )。
A、增大螺栓刚度Cb,减小被连接件刚度Cm B.减小Cb.增大Cm C.增大Cb和Cm D.减小Cb和Cm3、在螺栓连接设计中,若被连接件为铸件,则往往在螺栓孔处做沉头座孔.其目的是( )。
A.避免螺栓受附加弯曲应力作用 B.便于安装C.为安置防松装置4、选取V带型号,主要取决于。
A.带的线速度 B.带的紧边拉力c.带的有效拉力 D.带传递的功率和小带轮转速的主要几何参数是。
5、对于标准齿轮传动,影响齿形系数YFA.齿轮的模数 B.齿轮的压力角C.齿轮的齿数 D.齿轮的顶隙系数6、一斜齿圆柱齿轮传动,已知法向模数Mn=4mm,齿数Z1=20,螺旋角β=14032’2”,齿宽b1=80,b2=75mm,则该传动的齿宽系数φd等于——。
2009机械科学研究院硕士入学考试机原答案

2009机械科学研究院硕士入学考试《机械原理》试题答案一、填空题(共26分)1、 B 、等于2、 B .为90º3、 Z 2=48; 左旋;βcos 2)(21z z m n a +=',变为;调整螺旋角β4、 不一定;一定5、 大端: 212121,,R R m m ===αα6、 齿数;齿宽7、 a , b, c ; c8、 C ; D9、 C10、逆时针;右旋 二、总分:14分。
(1)5分;(2)4分;(3)5分(1)计算自由度F n p p =--=⨯-⨯-=32342511L H(2)高副低代,机构简图见图a 。
(3)结构分析(图b)该机构为Ⅱ级机构。
三、总分20分。
(1)12分;(2)8分(1)CB B C v v v +=,t n t n CBCB B C C C a a a a a a ++=+=,v pb B v =μ,v pc C v =μ,v bc CB v =μa b B a =πμ ',a b n CB a n =''2μ,a n c CB a t =2''μ,a n C a n =πμ3',a n c C a t =3''μ,a c C a =πμ '(2)∆BCE ∆bcp ,得E 点,vE =0;∆BCF ∆b c ''π,得F 点,a F =0四、总分20分。
(1)5分;(2)5分;(3)5分;(4)5分;(1)l l l l AB BC min max +=+=80mm其它二杆之和l l AD CD +=90mm即l l min max +<其它二杆之和,且连架杆l AB 为l min 。
该机构为曲柄摇杆机构。
有曲柄,即AB 杆为曲柄。
(3分)(2)该机构为曲柄摇杆机构,故有摇杆。
摇杆摆角范围ϕ=90 。
(3分)(3)有急回性,且θ=30 ,故K =+-=+-=()()()().180180180301803014 θθ。
机械原理历年试卷汇总及答案
机械原理历年试卷汇总及答案第2章机构的结构分析一、填空题:1、机构可能出现的独立运动数目称为机构的__________。
2、在平面机构中若引入个高副将引入个约束,而引入个低副将引入个约束,则活动构件数、约束数与机构自由度的关系是。
3、机构具有确定运动的条件是:;若机构自由度F>0,而原动件数<F,则构件间的运动是;若机构自由度F〉0,而原动件数>F,则各构件之间。
4、根据运动副中两构件的接触形式不同,运动副分为__________、__________。
5、根据机构的组成原理,任何机构都可以看作是由若干个__________依次联接到原动件和机架上所组成的。
6、在平面机构中,具有两个约束的运副是__副,具有一个约束的运动副是__副。
7、两构件之间为接触的运动副称为低副,引入一个低副将带入个约束.二、选择题1、当机构中原动件数目机构自由度数目时,该机构具有确定的相对运动。
A。
小于 B.等于 C.大于D.大于或等于2、某机构为Ⅲ级机构,那么该机构应满足的充分必要条件是.A。
含有一个原动件组; B.至少含有一个基本杆组;C.至少含有一个Ⅱ级杆组;D。
至少含有一个最高级别为Ⅲ级的杆组。
3、每两个构件之间的这种可动联接,称为__________。
A.运动副;B.移动副;C. 转动副;D.高副.4、基本杆组是自由度等于的运动链。
A.0;B.1; C。
原动件数.5、在图示4个分图中,图是Ⅲ级杆组,其余都是个Ⅱ级杆组的组合。
6、图示机构中有_______虚约束.A1个B2个C3个D没有7、图示机构要有确定的运动,需要有_______原动件。
A1个B2个C3个D没有三、简答题:1、机构组成原理是什么?2、何谓运动副?按接触形式分有哪几种?其自由度、约束数如何?3、机构中的虚约束一般出现在哪些场合?既然虚约束对于机构的运动实际上不起约束作用,那么在实际机械中为什么又常常存在虚约束?四、分析、计算题1、计算下图所示机构的自由度,若有复合铰链、局部自由度、虚约束,请指出。
机械原理考研历年真题第二章

第二章一:填空题1,(江苏大学05)作平面运动的三个构件,共有个瞬心,所有瞬心位于上,称为三心定理。
2 ,(江苏大学10)一个平面六杆机构总共有个瞬心,其中有个绝对瞬心,个相对瞬心。
3,(重大07)当两构件不直接组成运动副时,其瞬心位置用确定。
4,(浙江理工09)一铰链四杆机构中,共有_________速度瞬心,其中有_________个为绝对瞬心。
5.(浙江理工09)彼此作相对平面运动的三构件,其三个瞬心位于。
6.(浙江理工09)当两构件组成转动副时,其相对速度瞬心在 _______ 处;组成移动副时,其瞬心在_______ 处。
7,(浙江理工03)作相对运动的三个构件的三个瞬心必。
8,(浙江理工03)在机构运动分析图解法中,影像原理只适用于______上不同点之间的速度或加速度。
9,(西安建筑科技大学05)铰链四杆机构共有个速度瞬心,其中个是绝对瞬心,()个是相对瞬心。
10,(西安工业大学05)相对瞬心与绝对瞬心的相同点是 ,不同点是;在由N 个组成的机构中,有个相对瞬心。
11,(武汉理工04)速度与加速度的影像原理只适用于A,整个机构 B,主动件 C,相邻两个构件 D,同一构件二:简答题1,(东华大学03)如图8所示摆动导杆机构中,已知LAB =30mm,LAC=67mm,LBD=20mm, ω1=10rad/s.(1)标出该机构的全部速度瞬心;(2)用相对运动图解法求D3点的速度VD3;(3)判断B2B3两点之间的相对运动是否存在哥氏加速度,并简述理由。
2,(重大07)图3所示机构中,已知φ1=45°,ω1=10rad/s,逆时针方向,Lab=0.4m,γ=60°.试用相对运动图解法求构件3的速度v3和加速度a33,(江苏大学10)图示机构中,构件1以ω1匀角速度逆时针转动。
要求:1)在图中指出该机构的所有瞬心;2)在图示位置构件3的速度(用公式)。
4,(江苏大学09)图示三种凸轮机构,假设滚子与凸轮之间作纯滚动。