2007年江苏大学机械原理考研试题
考研机械原理复习试题(含答案)总结
考研机械原理复习试题(含答案)2一、正误判断题:(在括号内正确的画“√”,错误的画“×”)1.在平面机构中一个高副引入二个约束。
(×)2.任何具有确定运动的机构都是由机架加原动件再加自由度为零的杆组组成的。
(√)3.运动链要成为机构,必须使运动链中原动件数目大于或等于自由度。
(×)4.平面机构高副低代的条件是代替机构与原机构的自由度、瞬时速度和瞬时加速度必需完全相同。
(√)5.当机构自由度F>0,且等于原动件数时,该机构具有确定运动。
(√)6.若两个构件之间组成了两个导路平行的移动副,在计算自由度时应算作两个移动副。
(×)7.在平面机构中一个高副有两个自由度,引入一个约束。
(√)8.在杆组并接时,可将同一杆组上的各个外接运动副连接在同一构件上。
(×)9.任何机构都是由机架加原动件再加自由度为零的基本杆组组成。
因此基本杆组是自由度为零的运动链。
(√)10.平面低副具有2个自由度,1个约束。
(×)二、填空题1.机器中每一个制造单元体称为零件。
2.机器是在外力作用下运转的,当外力作功表现为盈功时,机器处在增速阶段,当外力作功表现为亏功时,机器处在减速阶段。
3.局部自由度虽不影响机构的运动,却减小了高副元素的磨损,所以机构中常出现局部自由度。
4.机器中每一个独立的运动单元体称为构件。
5.两构件通过面接触而构成的运动副称为低副;通过点、线接触而构成的运动副称为高副。
6.平面运动副的最大约束数为 2 ,最小约束数为1。
7.两构件之间以线接触所组成的平面运动副,称为高副,它产生2 个约束。
三、选择题1.机构中的构件是由一个或多个零件所组成,这些零件间 B 产生任何相对运动。
A.可以B.不能C.变速转动或变速移动2.基本杆组的自由度应为 C 。
A.-1B. +1C. 03.有两个平面机构的自由度都等于1,现用一个带有两铰链的运动构件将它们串成一个平面机构,则其自由度等于 B 。
机械原理考研历年真题第一章
第一章:机构的自由度一:填空题1,(08 同济大学)某平面基本杆组有四个构件,其低副数为()2,(西安工业学院05)一个平面运动副最多提供()个约束,最少提供()约束。
3,在平面机构中,一个运动副引入的约束数的变化范围是()。
4,机构具有确定运动的条件是自由度()而且机构的原动件数目()机构自由度数目。
5,(04 西北工大)在机构中,原动件指的是()。
机架指的是()。
从动件指的是()。
6,(04 重大)机构具有确定运动的条件是();根据机构的组成原理,任何机构都可以看成是由(),()和()组成。
7,(重大07)在平面机构中若引入一个高副将带入个约束,而引入一个低副将带入个约束。
8,(重大07)做平面运动的构件自由度为,平面机构的自由度为9,(江苏大学09)零件和构件的区别在于:零件是单元,构件是单元。
10,(江苏大学09)平面机构自由度计算公式F=3n-2p 5-p 4 n 指,p5指,p4指。
11,(江苏大学08 )平面机构组成原理表明:机构的组成就是把若干个自由度为零的联接到和机架上。
12,(江苏大学07)平面机构由机架、、组成。
13,(江苏大学06)平面机构中运动副按接触方式是面接触还是点接触,可分为及两类。
14,(江苏大学05)平面机构运动简图的比例尺是指长度与长度之比。
15,(江苏大学10)两构件之间只作平面相对转动的运动副称为,该运动副引入个约束;齿轮副属于(高副或低副),引入个约束。
16·组成机构的要素是和;构件是机构中的单元体。
17· 具有等三个特征的构件组合体称为机器。
18· 机器是由所组成的。
19· 机器和机构的主要区别在于。
20·从机构结构观点来看,任何机构是由三部分组成。
运动副元素是指 。
构件的自由度是指; 机 构的自由度是两 构件 之 间 以 线接 触所 组 成 的平 面运 动副 ,称为 副, 它产 个 约束, 而 保留 了 个 自由 度。
江苏大学研究生机械原理复习题
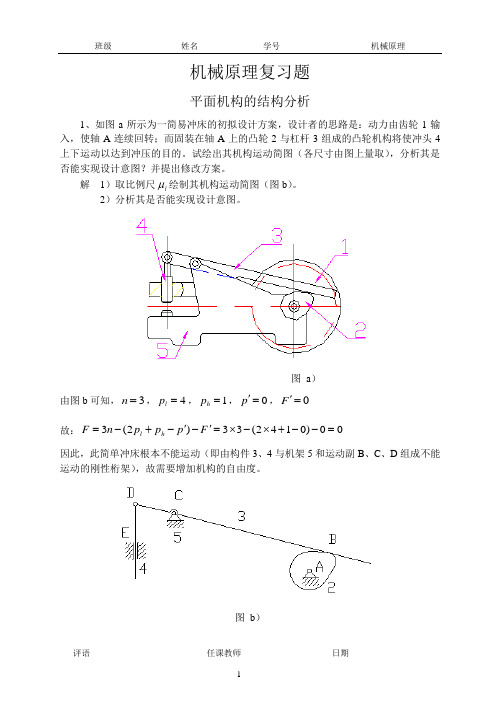
机械原理复习题平面机构的结构分析1、如图a 所示为一简易冲床的初拟设计方案,设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析其是否能实现设计意图?并提出修改方案。
解 1)取比例尺l μ绘制其机构运动简图(图b )。
2)分析其是否能实现设计意图。
图 a ) 由图b 可知,3=n ,4=l p ,1=h p ,0='p ,0='F 故:00)0142(33)2(3=--+⨯-⨯='-'-+-=F p p p n F h l因此,此简单冲床根本不能运动(即由构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架),故需要增加机构的自由度。
图 b )3)提出修改方案(图c )。
为了使此机构能运动,应增加机构的自由度(其方法是:可以在机构的适当位置增加一个活动构件和一个低副,或者用一个高副去代替一个低副,其修改方案很多,图c 给出了其中两种方案)。
图 c1) 图 c2)2、试画出图示平面机构的运动简图,并计算其自由度。
图a )解:3=n ,4=l p ,0=h p ,123=--=h l p p n F图 b )解:4=n ,5=l p ,1=h p ,123=--=h l p p n F3、计算图示平面机构的自由度。
将其中的高副化为低副。
机构中的原动件用圆弧箭头表示。
3-1解3-1:7=n ,10=l p ,0=h p ,123=--=h l p p n F ,C 、E 复合铰链。
3-2解3-2:8=n ,11=l p ,1=h p ,123=--=h l p p n F ,局部自由度3-3 解3-3:9=n ,12=l p ,2=h p ,123=--=h l p p n F4、试计算图示精压机的自由度解:10=n ,15=l p ,0=h p 解:11=n ,17=l p ,0=h p13305232=⨯-+⨯='-'+'='n p p p h l 26310232=⨯-⨯='-'+'='n p p p h l0='F 0='FF p p p n F h l '-'-+-=)2(3 F p p p n F h l '-'-+-=)2(310)10152(103=--+⨯-⨯= 10)20172(113=--+⨯-⨯=(其中E 、D 及H 均为复合铰链) (其中C 、F 、K 均为复合铰链)5、图示为一内燃机的机构简图,试计算其自由度,并分析组成此机构的基本杆组。
2007年考研试题及答案A

一、填空题(30分):1. (6分)由晶闸管构成的三相半波可控整流电路,当输入交流电压为t u ωsin 3112=,纯阻性负载且其值为10R =Ω,当控制角45α=时,输出平均电压为 ,输出的功率因数是 。
2.(6分)由晶闸管构成的单相桥式全控整流电路,当输入交流电压为t u ωsin 1412=,负载为反电动势且直流侧串联平波电抗器,已知60V, L=2E R =∞=Ω,,当控制角30α=时,输出平均电压为 ,输出平均电流为 。
3.(3分)缓冲电路( Snubber Circuit ) 的作用是 。
4.(3分)在交流供电系统中,当基波电流为140A I =,各次谐波电流分别为35792A, 1A, 0.5A, 0.2A I I I I ====, 则电流谐波总畸变THD 为 。
5.(3分)在逆变电路中,对于同一桥臂的开关管要采取“先断后通”的方法,也就是死区时间的设定,其目的是 。
6.(6分)单相桥式电压型逆变电路,180导通角,d 560V U =,则输出电压的基波有效值是 ,当只考虑10次以内的谐波电压时,输出电压的有效值是 。
7.(3分)在SPWM (Sinusoidal Pulse Width Modulation )控制的三相逆变电路中,设定的开关管的开关频率是20KHz ,逆变电路输出交流电压的频率为400Hz ,那么SPWM 控制电路中载波频率和调制波频率应分别设置为 和 。
二、简答题(60分):1. (7分)IGBT 在过流及短路过程中,系统如何检测并实施保护的?2. (7分)为什么晶闸管的触发信号通常不使用直流信号? 3. (7分)试说明有关晶闸管和电力晶体管的关断过程?4. (7分)请叙述电力二极管的反向恢复过程,在高频开关电路中,应选择什么型号的二极管?5. (8分)利用晶闸管SCR 构成的简易照明延时开关电路如图1所示,HL 是灯泡,SB 是开关,试分析此电路的工作原理。
机械原理考研历年真题第二章

第二章一:填空题1,(江苏大学05)作平面运动的三个构件,共有个瞬心,所有瞬心位于上,称为三心定理。
2 ,(江苏大学10)一个平面六杆机构总共有个瞬心,其中有个绝对瞬心,个相对瞬心。
3,(重大07)当两构件不直接组成运动副时,其瞬心位置用确定。
4,(浙江理工09)一铰链四杆机构中,共有_________速度瞬心,其中有_________个为绝对瞬心。
5.(浙江理工09)彼此作相对平面运动的三构件,其三个瞬心位于。
6.(浙江理工09)当两构件组成转动副时,其相对速度瞬心在 _______ 处;组成移动副时,其瞬心在_______ 处。
7,(浙江理工03)作相对运动的三个构件的三个瞬心必。
8,(浙江理工03)在机构运动分析图解法中,影像原理只适用于______上不同点之间的速度或加速度。
9,(西安建筑科技大学05)铰链四杆机构共有个速度瞬心,其中个是绝对瞬心,()个是相对瞬心。
10,(西安工业大学05)相对瞬心与绝对瞬心的相同点是 ,不同点是;在由N 个组成的机构中,有个相对瞬心。
11,(武汉理工04)速度与加速度的影像原理只适用于A,整个机构 B,主动件 C,相邻两个构件 D,同一构件二:简答题1,(东华大学03)如图8所示摆动导杆机构中,已知LAB =30mm,LAC=67mm,LBD=20mm, ω1=10rad/s.(1)标出该机构的全部速度瞬心;(2)用相对运动图解法求D3点的速度VD3;(3)判断B2B3两点之间的相对运动是否存在哥氏加速度,并简述理由。
2,(重大07)图3所示机构中,已知φ1=45°,ω1=10rad/s,逆时针方向,Lab=0.4m,γ=60°.试用相对运动图解法求构件3的速度v3和加速度a33,(江苏大学10)图示机构中,构件1以ω1匀角速度逆时针转动。
要求:1)在图中指出该机构的所有瞬心;2)在图示位置构件3的速度(用公式)。
4,(江苏大学09)图示三种凸轮机构,假设滚子与凸轮之间作纯滚动。
江苏科技大学机械工程学院《810机械原理》历年考研真题汇编

使___________
A. ;W,,=^/2
仁虬=0】
B. ^ti>Qd/2
D 也 >Qp
9,由于摩擦力的存H,扒仇楷 械会发生自就 谀..挤其实实照照姓 埴该机哝 W;的(
)i'HJtu
A,原沏件
B从动件
C.运动副
D.饮行枸件
第[页共4页
1。,凹轮机构中,从湖什岐余弦加速度(荷港}运幼切悻遥动时,将产生t
七、一对正常齿制的标准渐开线直齿圆柱齿轮啮合佳动机构.己知小齿轮模数所=3⑶m,齿数
4 = 20,传动比,=3,齿宽B = l5iTim,压力角住=20气 试分析*
(1)该对齿轮安装完成后.刚好实现连续转动(即重合度e = 1 ),计算其实际中心距妒和咂
合腿二
H)改用渐开线斜齿圆柱齿轮传动,中心距保持不变,旦齿轮齿数和法面参数与原推相 间.计算螺旋角胃和总度台度(26分)
)冲J3
A刚性
6,柔性
C.既无刷性也大柔性
D.既有刚性也有柔性
-■图示甲面机构远助院图.原动件偏心轮1TA点作等速旋胃.试计算图示机构的自由度,并
判制该机构是否具有确定运动(若含付复奇,链.局部自由度和施约束.清指明〉(16分j
L斐机器取其主抽为箸效构件,知我在■个艳定运动婚环中的悟燃酬力妊如图峋小,<111 咒咎效驱动力矩A/前为拭敖.若不汁机器«略构件的转衲金为保证机器主辎的平均■速 ^Jl500r/ min >且运为不均勾系数J -0.1时.试叫定; (1)等效驱劫力矩. <2>等效构件的最大•最小转速川皿与叶顿,阵指出花出现的位置】 (3)最大盈J功勒 ⑷吱占:等效椅世上加多大其动惯展的飞轮国(20分)
ft(即孔=i L计舞此时的啮冷格琴利中心距o\ (18分) 九、在图示捣埃机构也已蛆如= 30mm, /Af =100min . /(HJ = 50mm . /I)t = 40mm .刑i
(完整版)机械原理考试试题及答案3篇
试题1一、选择题(每空2分,共10分)1、平面机构中,从动件的运动规律取决于 D .A、从动件的尺寸B、机构组成情况C、原动件运动规律D、原动件运动规律和机构的组成情况2、一铰链四杆机构各杆长度分别为30mm ,60mm,80mm,100mm,当以30mm的杆为机架时,则该机构为 A 机构。
A、双摇杆B、双曲柄C、曲柄摇杆D、不能构成四杆机构3、凸轮机构中,当推杆运动规律采用 C 时,既无柔性冲击也无刚性冲击.A、一次多项式运动规律B、二次多项式运动规律C、正弦加速运动规律D、余弦加速运动规律4、平面机构的平衡问题中,对“动不平衡"描述正确的是 B 。
A、只要在一个平衡面内增加或出去一个平衡质量即可获得平衡B、动不平衡只有在转子运转的情况下才能表现出来C、静不平衡针对轴尺寸较小的转子(转子轴向宽度b与其直径D之比b/D〈0。
2)D、使动不平衡转子的质心与回转轴心重合可实现平衡5、渐开线齿轮齿廓形状决定于 D 。
A、模数B、分度圆上压力角C、齿数D、前3项二、填空题(每空2分,共20分)1、两构件通过面接触而构成的运动副称为低副 .2、作相对运动的三个构件的三个瞬心必在同一条直线上。
3、转动副的自锁条件是驱动力臂≤摩擦圆半径 .4、斜齿轮传动与直齿轮传动比较的主要优点:啮合性能好,重合度大,结构紧凑。
5、在周转轮系中,根据其自由度的数目进行分类:若其自由度为2,则称为差动轮系 ,若其自由度为1,则称其为行星轮系。
6、装有行星轮的构件称为行星架(转臂或系杆) .7、棘轮机构的典型结构中的组成有:摇杆、棘爪、棘轮等。
三、简答题(15分)1、什么是构件?答:构件:机器中每一个独立的运动单元体称为一个构件;从运动角度讲是不可再分的单位体。
2、何谓四杆机构的“死点"?答:当机构运转时,若出现连杆与从动件共线时,此时γ=0,主动件通过连杆作用于从动件上的力将通过其回转中心,从而使驱动从动件的有效分力为零,从动件就不能运动,机构的这种传动角为零的位置称为死点。
机械专业课真题汇总
机械专业课真题汇总机械原理真题09重庆大学机械原理真题11山东科技大学机械原理真题18华中农业大学机械原理真题2010武汉理工机械原理09山东科技大学机械原理真题19西安电子科技大学机械原理2015西工程机械原理试题及答案解析05年上海理工大学机械原理13年上海理工大学机械原理2010武汉理工机械原理20浙江工业大学机械原理14西安电子科技大学机械原理17西安电子科技大学机械原理18西安电子科技大学机械原理2019浙江理工大学机械设计基础2018浙江理工大学机械设计基础2017浙江理工大学机械设计基础2020温州大学机械原理2009武汉理工机械原理2012河北工业大学机械原理2010北京交通大学机械原理2020南京航空航天大学机械原题真题2020机械原理考研真题及答案(武汉科技大学)2019机械原理真题及答案(武汉科技大学)2018机械原理真题及答案(武汉科技大学)2017机械原理真题及答案(武汉科技大学)2016机械原理真题及答案(武汉科技大学)2015机械原理真题及答案(武汉科技大学)2014机械原理真题及答案(武汉科技大学)2013机械原理真题及答案(武汉科技大学)2012机械原理真题(武汉科技大学)2011机械原理真题(武汉科技大学)2011机械原理真题答案(武汉科技大学)2019杭州电子科技大学机械原题真题2012南京航空航天大学机械原题真题2013东南大学机械原题真题2011东南大学机械原题真题及答案2004福州大学机械考研真题答案2004福州大学机械考研真题2011中国矿业大学机械原理真题2014江苏理工学院机械原理真题A答案2014江苏理工学院机械原理真题A上海理工大学机械06年考研真题笔记(一)上海理工大学机械07年考研真题笔记(二)上海理工大学机械08、10、12、13年考研真题笔记(三)2007河北工业大学机械原理真题答案2007河北工业大学机械原理真题2018西安工业大学机械原理真题2019三峡大学机械原理考研真题2018三峡大学机械原理考研真题2015年南京理工大学机械原理考研真题2019年武汉科技大学机械原理考研真题江苏大学803机械原理样题答案江苏大学803机械原理考试样题2012江苏大学803机械原理考研真题2008江苏大学803机械原理考研真题2006江苏大学803机械原理考研真题2011江苏大学803机械原理考研真题2007江苏大学803机械原理考研真题2009江苏大学803机械原理考研真题2010江苏大学803机械原理考研真题2016年中山大学886机械原理考研真题05合肥工业机械原理17昆明理工机械原理20昆明理工机械原理19昆明理工机械原理机械设计/机械设计基础真题2021扬州大学机械设计真题07江南大学机械设计真题08江南大学机械设计真题07浙江大学机械设计基础真题18广东工业大学机械设计基础真题2016太原科大机械设计基础真题中国科学院大学20机械设计真题15广东工业大学机械设计基础真题07天津工业大学机械设计基础真题11厦门大学机械设计基础真题2012宁夏大学机械考研试题2018浙江理工大学机械设计基础2017宁夏大学机械设计2010西安理工机械设计基础2018山东大学机械设计基础2013深圳大学机械设计基础2007西安交通大学机械设计基础2008西安交通大学机械设计基础2019湖北工业大学机械设计真题2020湖北工业大学机械设计真题2018湖北工业大学机械设计真题20南京工业大学机械设计真题20河海大学机械考研真题及答案2018华侨大学机械设计考研真题2018广州大学机械设计真题答案2018广州大学机械设计真题2016广州大学机械设计真题答案2016广州大学机械设计真题2015广州大学机械设计真题答案2015广州大学机械设计真题2014广州大学机械设计真题答案2014广州大学机械设计真题2020广东工业大学机械设计基础真题答案2020广东工业大学机械设计基础真题2019广东工业大学机械设计基础真题答案2019广东工业大学机械设计基础真题2008西安交通大学机械设计基础真题答案西安交通大学2008年机械设计基础真题2014年江西理工大学机械设计基础考研真题2018年山东大学844机械设计基础考研真题2017年山东大学844机械设计基础考研真题2016年山东大学844机械设计基础考研真题2019年广东工业大学801机械设计基础考研真题2017年华南理工大学856机械设计基础考研真题2018东华理工大学832机械设计考研真题2017东华理工大学832机械设计考研真题2017东华理工大学832考研真题答案2016东华理工大学832机械设计考研真题2016东华理工大学832考研真题答案2011广东工业大学机械设计基础真题2011广东工业大学机械设计基础真题答案华中科技大学2010年机械设计基础真题湘潭大学2013年机械设计基础真题2011宁夏大学机械设计(含机械原理)考研真题厦门大学2012年机械设计基础真题中国科学技术大学2014年机械设计真题材料力学真题2015年南京理工大学材料力学考研真题2014年江西理工大学材料力学考研真题2017年华南理工大学841材料力学考研真题2008年吉林大学材料力学真题答案(资料样板)2020南京航空航天大学材料力学真题理论力学真题2004燕山大学理论力学2015年南京理工大学理论力学考研真题2019年宁波大学理论力学考研真题(B卷)2015青岛理工大学814理论力学考研真题2012南京航空航天大学815理论力学考研真题汽车理论真题2019年武汉科技大学汽车理论考研真题2018年华南理工大学812汽车理论考研真题答案2018浙江工业大学819汽车理论考研真题2019年广东工业大学805汽车理论考研真题2018年华南理工大学812汽车理论考研真题2017年华南理工大学812汽车理论考研真题2016年华南理工大学812汽车理论考研真题液压传动真题2019年武汉科技大学液压传动考研真题流体力学真题2017年华南理工大学836流体力学与传热考研真题2016年华南理工大学836流体力学与传热考研真题每日一题:静平衡的转子( B )是动平衡的,动平衡的转子( A )是静平衡。