三维测量技术
第2章 三维数据测量技术

8 预对焦:进行拍照测量前,对测量物体、投影设备条纹 精度进行校正的过程。
9 采集区域:拍照扫描时,设备当前单次扫描能够采集的 最大区域。
汽车点云数据
2.3三维扫描仪操作 2.3.1三维扫描仪组成与连接
2.3.2设备操作步骤及方法 1.扫描仪幅面调节
层 ③扫描物体表面存在高强度的镜面反射
2) 标记点
标记点的作用:每一次采集都应至少识别 出三个标记点,作为拼接数据的依据。
贴标记点的情形:除物体表面纹理特征明 显之外的所有情形都应粘贴标记点。
①.标记点应无规则得分布在被测物体的表面上,且在相 机窗口中清晰可见。标记点不要贴在一条直线上,应该成 V 型分布。标记点尽量粘在物体表面上。
2.1.2接触式数据扫描 关节式
2.1.2接触式数据扫描
优点
1)精度高。由于该种测量方式已经有几十年的发展历史,技术已经相对 成熟,机结构稳定,因此测量数据准确。
2)被测量物体表面的颜色、外形对测量均没有重要影响,并且触发时 死角较小,光强没有要求。
3)可直接测量圆、圆柱、圆锥、圆槽、球等几何特征,数据可输出到 造型软件后期处理。
②.打开标定窗口 点击工具条中的 按钮,打开标定窗口。 ③.点击工具条中的 按钮,对标定靶进行图像采集。如图
2-14 所示。
⑩.点击工具条中的 按钮,进行角点检测。 观察角点检测结果是否正确,角点的排列 是否整齐(如图2-19所示)。
3 扫描前准备工作
1) 显像剂 有下列情况之一需要使用显像剂 ①.扫描物体是深黑色 ②.扫描物体表面透明,或者有一定的透光
2.1.2接触式数据扫描
接触式三维数据测量设备,是利用测量探头与被 测量物体的接触,触发一个记录信息,并通过相 应的设备记录下当时的标定传感器数值,从而获 得三维数据信息。
三维测量方法总结

三维测量方法总结概述:三维测量是指通过测量对象在三个方向上的空间坐标,来获取对象的三维形状和位置信息的过程。
它在工程、制造、建筑等领域中广泛应用,能够提供高精度、全面的测量数据,为各行各业的设计、分析和生产提供重要支持。
传统三维测量方法:传统的三维测量方法主要包括直接测量法和间接测量法。
直接测量法是通过使用测量仪器直接测量对象的空间坐标来获取其三维信息,常见的仪器有全站仪、激光测距仪等。
间接测量法则是通过测量对象的相关参数,并利用数学模型计算得到其三维信息。
传统的三维测量方法在一定程度上受限于测量精度、测量范围和测量效率等问题。
现代三维测量方法:随着科技的发展,现代三维测量方法不断涌现,使得测量精度和效率有了更大的提升。
以下介绍几种常见的现代三维测量方法。
1. 光学三维测量法:光学三维测量法是利用光学原理进行测量的方法,常见的技术包括结构光投射、视觉测量、干涉测量等。
其中,结构光投射是通过投射编码光纹或光栅到被测物体上,然后通过相机捕捉图像,利用图像处理算法计算出物体的三维坐标。
视觉测量则是通过相机拍摄物体的影像,通过对图像进行处理和分析,得到物体的三维形状和位置信息。
干涉测量则是利用光的干涉原理来测量物体表面的形貌和位移信息。
2. 激光雷达测量法:激光雷达测量法是一种利用激光束扫描地面或物体来获取其三维信息的方法。
激光雷达通过发射激光束,并接收反射回来的激光信号,通过计算激光的飞行时间和光的速度,可以确定目标物体的距离。
通过扫描多个角度,可以获取物体在三维空间的坐标信息。
激光雷达具有高精度、长测量距离和快速测量速度等优点,被广泛应用于地形测量、建筑物测量和无人驾驶等领域。
3. 三维扫描测量法:三维扫描测量法是利用激光扫描仪或光学扫描仪对物体进行扫描,获取其表面的三维点云数据。
通过对点云数据进行处理和重建,可以得到物体的三维形状和位置信息。
三维扫描测量法具有非接触、全面性和高精度等特点,适用于复杂形状和大范围的测量任务,被广泛应用于逆向工程、文物保护和数字化建模等领域。
三维测绘技术的介绍与操作指导

三维测绘技术的介绍与操作指导引言:随着科技的不断发展,三维测绘技术在各个领域中得到了广泛应用。
它通过使用激光扫描仪、全站仪等设备,能够获取物体的准确的三维数据,为工程设计、文化遗产保护、城市规划等提供了强有力的支持。
本文将介绍三维测绘技术的原理和操作指导,以帮助读者了解和使用这一技术。
一、三维测绘技术的原理在介绍三维测绘技术的操作指导之前,我们需要先了解其原理。
三维测绘技术主要通过激光扫描仪或全站仪等设备采集物体的点云数据,并借助特定软件进行数据处理和模型生成。
1. 激光扫描仪的原理激光扫描仪利用激光束在物体表面上不断扫描,通过测量激光束的反射时间和强度,计算出物体表面上每个点的坐标值。
激光扫描仪可以实现非接触式的测量,因此适用于测量复杂形状的物体。
2. 全站仪的原理全站仪是一种结合了全站仪和全自动测距仪的测量设备。
它可以同时测量目标物体的空间坐标和距离,并且具有高精度和高测量速度的特点。
全站仪通过测量物体上特定点的坐标值,进而获取整个物体的三维坐标数据。
二、三维测绘技术的操作指导了解了三维测绘技术的原理之后,下面将介绍它的具体操作步骤。
1. 设备准备首先,需要准备激光扫描仪或全站仪等测量设备,确保其处于正常工作状态。
同时,还需准备数据处理软件,并确保其安装和配置正确。
2. 测量点云数据在测量时,需要选择合适的测量方法和参数。
对于激光扫描仪而言,应根据具体情况选择扫描模式和扫描密度,以获取精确的点云数据。
对于全站仪而言,则需根据目标物体的大小和形状进行站姿安排,保证测量点的充分覆盖。
3. 数据处理和模型生成采集到的点云数据需要导入到数据处理软件中进行处理和模型生成。
在处理过程中,需要对数据进行滤波、配准和拼接等操作,以提高数据的精度和完整性。
随后,可以根据需要进行三维重建和模型生成,生成的模型可用于后续的分析和应用。
4. 数据分析和应用生成三维模型后,可以进行数据分析和应用。
在工程领域,可以利用三维模型进行设计和施工规划,提高工作效率和质量。
光学三维测量技术应用举例并解析

光学三维测量技术应用举例并解析
光学三维测量技术是一种通过光学原理和数学模型来测量物体三维形态和位置的技术,可以应用于很多领域。
以下是一些光学三维测量技术的应用举例:
1. 航空航天:光学三维测量技术可以用于飞机、火箭、卫星等的设计、制造和维护中。
例如,利用激光三角测量法和相移法可以快速测量飞机机翼、机身的形态尺寸和表面粗糙度;利用三维扫描仪可以对航空设备进行三维建模,方便进行数字化制造。
2. 汽车制造:光学三维测量技术可以应用于汽车设计、制造、测试和维护中。
例如,在汽车制造过程中,可以利用激光三角测量仪对车身各部位进行快速、高精度的三维测量,以保证车身的精度和稳定性;利用三维扫描仪可以对汽车零部件进行三维建模。
3. 医疗领域:光学三维测量技术可以用于医学成像、手术导航和矫形医疗等领域。
例如,在牙科矫形过程中,利用激光三角测量仪可以快速,准确地测量牙齿位置和尺寸,以确定矫形方案。
4. 文化遗产保护:光学三维测量技术可以应用于文化遗产保护,如对文物、建筑、遗址等进行三维测量和数字化保护。
例如,利用三维激光扫描仪可以对文物、
建筑等进行全面而精确的三维数字化保护,方便后续保护、修复和展示。
总之,光学三维测量技术是一种非常实用的测量技术,可以在各个领域得到广泛应用,为很多工作带来了便利和效率提高。
三维测量技术的方法及应用

三维测量技术的方法及应用一、引言三维测量技术是近年来在科学研究和工程实践中日益重要的一项技术。
它可以在不接触被测对象的情况下,通过非接触手段获取物体的三维形状和结构信息,对于工程设计、制造、检测等领域具有重要的应用价值。
本文将详细介绍三维测量技术的方法及应用,以帮助读者了解这一领域的最新进展和应用前景。
二、三维测量技术的分类根据不同的原理和方法,三维测量技术可以分为以下几类:2.1 光学测量技术光学测量技术是利用光线传播的特性来获取物体形状和结构信息的一种方法。
常见的光学测量技术包括激光扫描、光栅投影、相位测量等。
这些技术都能够实现高精度的三维测量,并广泛应用于制造业、航空航天等领域。
2.2 非接触式接触测量技术非接触式接触测量技术是利用电磁波、声波等非接触手段对物体进行测量的方法。
其中,雷达和超声波测量技术是常见的非接触式接触测量技术。
这些技术适用于测量较大尺寸、复杂形状的物体,广泛应用于建筑、地质勘探等领域。
2.3 接触测量技术接触测量技术是通过传感器与被测物体直接接触,通过测量传感器的位移、转角等信息获取物体的三维形状和结构信息的一种方法。
常见的接触测量技术包括坐标测量机、刚体测量等。
这些技术适用于测量较小尺寸、复杂形状的物体,广泛应用于汽车制造、机械加工等领域。
三、三维测量技术的应用三维测量技术在各个领域都有广泛的应用,下面将从工程设计、制造、检测等方面介绍三维测量技术的具体应用。
3.1 工程设计三维测量技术在工程设计中起到了重要的作用。
它可以对物体的三维形状和结构进行精确测量,为工程设计提供准确的数据基础。
通过三维测量技术,设计师可以更好地进行产品设计、装配设计等工作,提高设计效率和质量。
3.2 制造在制造过程中,三维测量技术可以用来检测产品的质量和尺寸是否符合要求。
它可以通过快速、精确地测量产品的几何参数,及时发现并解决制造过程中的问题,确保产品的质量和性能,提高制造效率。
3.3 检测在产品出厂前的检测工作中,三维测量技术也发挥着重要的作用。
测绘技术中的三维测量与建模方法
测绘技术中的三维测量与建模方法引言:随着科技的不断发展和社会的不断进步,测绘技术也在不断革新与完善。
其中,三维测量与建模方法的应用日益广泛,为我们提供了更加精确和逼真的空间信息。
本文将重点论述测绘技术中的三维测量与建模方法,以及其在不同领域的应用。
一、激光扫描测量技术激光扫描测量技术(Lidar)是一种基于激光雷达原理的三维测量方法。
采用激光扫描仪进行扫描,可以获取曲面的三维坐标信息,并通过计算与绘图来构建三维模型。
激光扫描测量技术具有高精度、自动化程度高等优点,广泛应用于地形测量、建筑物立面测量、文物保护等领域。
二、结构光三维测量技术结构光三维测量技术是一种利用结构光原理进行三维形状重建的方法。
通过投射特殊编码的结构光,可记录目标物体表面的形状信息,再通过图像处理和数学运算等步骤,获取目标物体的三维坐标信息,从而实现真实环境中的三维建模。
结构光三维测量技术可以广泛应用于人体形状测量、工件配合度检测、工艺设计等领域。
三、摄影测量技术摄影测量技术是一种基于航空或航天影像进行三维测量与建模的方法。
通过对多个角度和位置的影像进行解算和处理,可以实现对地面物体的三维坐标测量和建模。
摄影测量技术具有覆盖范围广、成本较低等优势,被广泛应用于地球科学研究、城市规划、生态环境监测等领域。
四、无人机测量技术无人机测量技术是指利用无人机平台进行三维测量与建模的方法。
通过搭载高精度的传感器设备,如全球定位系统(GPS)、惯性导航系统(INS)、激光雷达等,无人机能够实现对地面物体的精确测量和数据采集。
无人机测量技术具有高效、便捷等优点,广泛应用于土地调查、自然灾害监测、矿山勘探等领域。
五、三维建模与可视化技术三维建模与可视化技术是将三维测量得到的数据进行处理和加工,以创建真实、逼真的三维模型或场景。
通过可视化技术的应用,可以实现对复杂空间信息的可视化展示,提供更直观、更直观的观察和分析手段。
三维建模与可视化技术被广泛应用于游戏开发、虚拟现实、设计与艺术等领域。
三维测量技术及设备解读
三维测量技术及设备解读三维测量技术是现代科技领域中非常重要的一项技术,其在各个行业中都有着广泛的应用。
它能够快速准确地测量出物体的各种参数,为制造、设计等领域提供了强有力的支持。
下面将对三维测量技术及其相关的设备进行解读。
什么是三维测量技术?三维测量技术是指通过测量物体的长、宽、高等参数来确定其三维形态的一种技术。
与二维测量技术相比,三维测量技术更加精准和全面。
在三维测量中,可以利用激光测量、相位测量、光栅测量等多种方法来实现。
三维测量技术的应用制造行业在制造行业中,三维测量技术可以用于检测零件的尺寸、形状等参数是否符合要求,从而保证制造出的产品符合质量标准。
同时,在新产品的开发过程中,三维测量技术也能够提供重要的数据支持,为制造过程提供更大的效率和准确性。
建筑行业在建筑行业中,三维测量技术可以用于测量建筑物的各种参数,如墙面、楼梯、房间等的尺寸和形状。
同时,三维测量技术还可以用于建筑结构的全息图像重建,以及建筑物的维护和巡检等。
医学行业在医学行业中,三维测量技术可以用于人体各个部位的测量和成像。
例如,三维测量技术可以用于测量人体骨骼、器官和组织的尺寸和形状,以及对于病变部位的检测和诊断。
三维测量设备解读激光三维测量设备激光三维测量设备是现代三维测量技术中最常用的一种设备。
其基本原理是利用激光线的反射来测量物体的距离和形状。
激光三维测量设备可以测量的范围非常广泛,可以达到几公里到几毫米的范围,并且测量的精度非常高。
绝对式三维测量仪绝对式三维测量仪是一种通过比对不同测量点上的数据来计算出物体三维坐标的仪器。
其精度非常高,可以达到微米级别。
此外,绝对式三维测量仪还可以用于测量物体的轮廓、表面形貌、直径等。
光线扫描仪光线扫描仪是一种通过扫描物体表面来测量物体形状的仪器。
其工作原理是将激光或光栅照射到物体表面,通过对反射光的捕捉和分析来计算出物体的三维坐标和形状。
光线扫描仪非常适用于测量复杂、曲面和不规则形状的物体。
高精度空间三维测量技术的操作流程与要点

高精度空间三维测量技术的操作流程与要点概述高精度空间三维测量技术是一种用来获得物体三维形态和工艺尺寸的精确测量方法。
本文将介绍这种技术的操作流程与要点,帮助读者了解如何进行高精度空间三维测量。
第一部分:前期准备工作在进行高精度空间三维测量之前,需要进行一系列的准备工作。
1. 确定测量目标:明确要测量的物体或结构,以及测量的目的和要求。
这有助于确定选择合适的测量仪器和方法。
2. 准备仪器设备:根据测量需求选择适当的仪器设备,如全站仪、激光扫描仪等,并进行校准和调试,确保其稳定可靠。
3. 确定测量场景:选择合适的测量环境,确保没有干扰物、光线充足,并保证测量仪器的工作环境稳定。
第二部分:测量操作流程高精度空间三维测量的操作流程一般包括以下几个步骤:1. 建立测量控制点:在测量区域内,设置测量控制点,用于校正测量仪器的坐标系统以及后续的数据处理。
2. 数据采集与处理:使用测量仪器对目标进行扫描或测量,获取空间点云或三维坐标数据。
在采集过程中,需要注意采集的角度、视野等,并结合实际情况进行多次采集以提高测量精度。
采集完成后,对数据进行处理,如去除噪声、配准点云等。
3. 建立三维模型:利用测量数据建立三维模型。
可以使用专业软件进行数据处理和三维模型的构建,根据需要可以添加颜色、纹理等信息以获得更直观的模型。
4. 模型分析与评估:对建立的三维模型进行分析和评估,以验证其准确性和完整性。
可以进行尺寸、形状、表面平整度等方面的分析,与设计要求进行比较。
5. 结果输出与展示:根据测量需求,将测量结果进行输出和展示。
可以生成报告、图表、动画等形式,以便于数据的传递和分析。
第三部分:测量要点与注意事项在进行高精度空间三维测量时,需要注意以下要点和注意事项:1. 仪器校准:确保测量仪器进行准确的校准,以获得可靠的测量结果。
2. 数据采集:在数据采集过程中,要保持稳定的手持姿势,避免震动和晃动,以影响测量精度。
3. 光照环境:保证光线充足,避免强光直射或反射,以确保测量数据的准确性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2008年6月宇航计测技术June .,2008第28卷 第3期Journal of A str onautic Metr ol ogy and Measure mentVol .28,No .3文章编号:1000-7202(2008)03-0052-05 中图分类号:TP334.2+1文献标识码:A收稿日期:2008-03-02作者简介:朱凯歌(1983— ),男,硕士研究生,主要研究领域:精密测控技术及仪器智能化。
nRF24E1在光笔式坐标测量机中的应用朱凯歌 刘书桂 凌清平 石雪梅(天津大学精密仪器与光电子工程学院,天津300072)摘 要 为了发挥光笔式坐标测量机测量速度快、移动灵活、携带方便的特点,利用无线单片机nRF24E1构建无线传输模块,给出了无线传输模块在光笔式坐标测量机中的应用方案,具体介绍了系统的硬件设计、通信协议和软件架构。
通过实验验证,在10m 通信距离内,无线传输系统能够稳定可靠地传输数据。
因此在光笔式坐标测机中可以代替线缆使用。
关键词 光笔式坐标测量机 视觉测量 无线传输 通信协议Appli cati on of nRF 24E 1i n the L i ght -pen C MM sZHU Kai 2ge L IU Shu 2gui L ING Q ing 2p ing SH I Xue 2mei(College of p recisi on instru ment and op t o 2electr onics engineering,Tianjin University,Tianjin 300072)Abstract I n order t o utilize the advantages of the light 2pen C MM s,such as fast measuring,easily moving and conveniently carrying,it is best t o use wireless communicati on .W ireless module e mbed wire 2less MCU 2nRF24E1was designed .The res oluti on of using wireless module in the light 2pen C MM s was given .The hard ware,communicati on p r ot ocol and s oft w are fra me work was intr oduced .By experi m ent,within 10meter,the syste m could steadily and exactly communicate .So the wireless module can rep lace wire in the light 2pen C MM s .Key words L ight 2pen C MM s V isi on measure ment W ireless communicati on Communicati on p r ot ocol1 引 言光笔式坐标测量机作为一种便携式坐标测量机,是一种新兴的视觉坐标测量技术。
它将接触式测量和非接触式测量结合起来,充分发挥接触式测量的测量精度高和非接触式测量的测量系统组建灵活的优点[1]。
目前在光笔式坐标测量机中使用有线方式传输数据,有线传输具有线缆长度有限、系统移动不灵活、系统组建麻烦等固有缺陷。
使用无线传输技术可以克服以上缺点,因此在光笔式坐标测量机中使用无线传输技术成为其发展趋势。
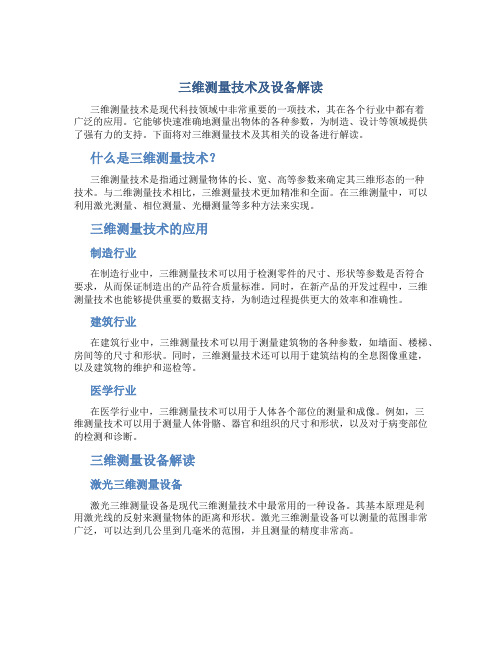
2 系统总体设计采用无线传输技术的双相机光笔式坐标测量机应用示意图如图1所示,在需要传输信息的端点处(光笔端、计算机端、CCD 摄像机端),分别安装射频通信模块,即可将有线传输改为无线传输。
多个射频通信模块组成一个小型无线通信网络,网络中任意两无线传输模块之间均可以相互通信。
图1 双相机光笔式坐标测量机中无线传输模块应用示意图在光笔式坐标测量机中无线传输控制系统具有以下功能:1)光笔端的无线传输模块接受输入信号(开关信号、数字信号、模拟信号),将数据按照协议打包后发射出去;2)光笔端的无线传输模块在发射信息后接收计算机的反馈信息,以确定命令执行结果或者数据是否正确传输,并将处理状态显示给用户;3)计算机在接收到光笔端的触发控制信号后,向摄像机发出触发控制命令,摄像机在接收到触发命令后即采集一次图像,数据可暂存在摄像机内,然后再送到计算机,也可以每采集一次数据就送计算机;4)计算机在接收到模式切换信号后,即切换摄像机工作模式(触发工作方式或扫描工作方式),在扫描工作模式下,摄像机连续采集图像数据信息,并将数据信息暂存后发送到计算机;5)系统具有低功耗设计。
因为无线传输模块应用在便携式坐标测量机中,所以要求无线传输模块能够最大程度地降低功耗,延长电池的使用寿命。
3 系统实现3.1 硬件电路设计无线传输模块硬件系统框图如图2所示,整个系统以nRF24E1为中心,主要分为三个部分:信号的输入输出部分负责接受开关信号、数字信号、模拟信号的输入和通过输出驱动LED;射频收发部分负责数据的无线收发;接口转换部分将单片机的UART 接口转换为US B 接口,实现与计算机的双向通信。
图2 无线传输模块硬件系统框图无线传输模块电路原理图如图3所示,从图中可以看出主要元件包括无线单片机nRF24E1、串行EEPROM 存储器25AA320、US B 2UART 桥接芯片CP2102和16MHz 无源晶振,其它就是一些电阻、・35・ 第3期 nRF24E1在光笔式坐标测量机中的应用电容和电感元件。
电路所需元件很少,保证电路设计简单,工作稳定可靠。
nRF24E1为北欧NORD I C 公司生产的无线单片机[2,3]。
芯片工作于(2.4~2.5)GHz 国际通用I S M 频段,无需申请许可证即可免费使用,方便了用户开发使用;芯片可设置125个工作频点,方便用户采用跳频技术来避免同频干扰;内置CRC 校验功能,保证数据的可靠传输;具有寻址控制功能,能够实现点对多点的无线通信,构建无线传输控制网络;内置9路10位A /D 转换模块,取样速率100Ks p s,用户可以构建数据采集控制系统;工作电压为(1.9~3.6)V ,工作电流小,因此芯片功耗很低,适合用在电池供电的便携式设备中;具有Duo 2Ceiver 技术,使无线传输模块可以使用同一天线同时接收两个不同频道的数据;芯片最大数据传输速率为1Mbp s,能够满足光笔式坐标测量机中大量坐标数据传输的速度需要;最大发射功率为0dBm ,接收灵敏度为-90d Bm ,在较理想环境中,传输距离可达(30~40)m 。
nRF24E1片内仅有4K 的RAM ,需要一块片外EEPROM 来存储用户应用程序。
系统选用M I CRO 2CH I P 公司的25AA320芯片。
该芯片具有4K 存储空间和宽工作电压范围(1.8~5.5)V 。
nRF24E1具有一个UART 口,与计算机通信需要转换为计算机串口。
系统选择US B 2UART 技术,即将计算机US B 口转换为单片机的UART 口。
CP2102[4]是高度集成的US B 2UART 桥接器,无需其它外部US B 元件,最少仅需一个电容就可以工作。
片内电压调节器具有3.3V 电压输出,可作为nRF24E1的电源。
3.2 通信协议设计协议的第一件事就是能够识别噪声和有效数据。
噪声是以随机字节出现的,没有明显的方式。
通过测试和试验发现0xFF 后跟0x00在噪声中不容易发生,传输协议应该在数据包前加上开始字节0xFF 和0x00[5,6]。
那么一个简单的无线通信协议就开发出来了:[0xFF ][0x00][包类型][数据0]...[数据n ]。
图3 无线传输模块电路原理图光笔式坐标测量机中的无线传输系统的数据传输类型分为以下五种情况:1)光笔端发送给计算机端的触发控制信号和模式切换信号,格式为:“##data $$”。
data 为控制・45・宇航计测技术 2008年 命令代码;2)光笔端发送给计算机端的模数转换后的数字信号,格式为:“@@data$$”,data为模数转换结果;3)光笔端接收到计算机端的反馈信号,格式为:“33data$$”,data为反馈信号;4)计算机端发送给摄像机端的触发控制信号和模式切换信号,格式为:“&&data$$”,data为控制命令代码;5)摄像机端发送给计算机端的图像数据信息:“%%data$$”,data是三维坐标信息。
数据的前两个字节为数据类型标识符,后两个字节(“$$”)是数据结束标识符。
计算机在接收到数据后,通过数据类型标志符就可以判断接收到的数据类型,针对不同的数据类型做出相应的处理。
nRF24E1具有简单的通信协议控制功能。
对其进行相应的配置后,芯片就可以自动按照协议进行无线通信。
射频数据包格式如表1所示。
用户发射数据时,只需要按照要求送地址字节和数据字节,接收端就能够正确地接收数据。
表1 射频数据包格式前导码地址有效数据CRC这里的“有效数据”即是前面所讲的通信协议设计所包括的内容:[0xFF][0x00][包类型][数据0]...[数据n]。
接收端在接收到数据后,自动提取出有效数据,然后按照协议对数据进行解析处理。
3.3 软件设计软件设计是在KE I L u V I SI O N3环境下实现的,程序编写采用KE I L C语言。
软件设计采用模块化思想,将程序按照功能划分为一个个模块[7]。
在无线收发系统中,光笔端为发送端,计算机端为接收端。
发送端程序流程图如图4所示。
接收端程序流程图如图5所示。
系统硬件中设计了两个按键,当按键1按下,表示发射触发控制命令,当按键2按下,表示发射模式切换命令。
在程序空闲时执行按键扫描程序,一旦扫描到有按键按下,即进入相应的键值处理程序。
当A/D转换完成,发出中断,系统响应中断,发送A/D转换后的数据信息。
在系统中,使用LED 表示模块的工作状态和反馈信息状态,如表2。
当模块工作在接收数据状态时绿色LE D亮,当工作在图4 发送端程序流程图图5 接收端程序流程图发送数据状态时,红色LE D亮。
光笔端(发送端)在发送命令后,等待计算机端(接收端)的反馈信号,若命令执行成功,则绿色LE D闪烁,若命令执行・55・ 第3期 nRF24E1在光笔式坐标测量机中的应用不成功,则红色LE D闪烁。
当成功地切换到扫描模式后,绿色LED和红色LED同时闪烁。
表2 指示灯状态与工作状态对应关系表指示灯绿亮红亮绿亮红亮绿闪红闪红闪绿闪模块状态接收状态发送状态复位状态成功失败扫描模式4 结束语nRF24E1以数字量的形式进行无线通信,在正常工作情况下,能够保证系统不会出现传输误差。