全维状态观测器例
利用MATLAB设计状态观测器
利用MATLAB 设计状态观测器本节将介绍用MATLAB 设计状态观测器的若干例子。
我们将举例说明全维状态观测器和最小阶状态观测器设计的MATLAB 方法。
------------------------------------------------[例1] 考虑一个调节器系统的设计。
给定线性定常系统为Cxy Bu Ax x =+=& 式中]01[,10,06.2010=⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=C B A且闭环极点为)2,1(==i s i μ,其中4.28.1,4.28.121j j −−=+−=μμ期望用观测-状态反馈控制,而不是用真实的状态反馈控制。
观测器的期望特征值为821−==μμ试采用MATLAB 确定出相应的状态反馈增益矩阵K 和观测器增益矩阵e K 。
[解]对于题中给定的系统,可利用如下MATLAB Program 1来确定状态反馈增益矩阵K和观测器增益K。
矩阵eMATLAB Program 1% Pole placement and design of observer ------% ***** Design of a control system using pole-placement% technique and state observer. Solve pole-placement% problem *****% ***** Enter matrices A,B,C,and D *****A=[0 1;20.6 0];B=[0;1]C=[1 0];D=[0];% ***** Check the rank of the controllability matrix Q *****Q=[B A*B];Rank(Q)ans=2% ***** Since the rank of the controllability matrix Q is 2, % arbitrary pole placement is possible *****% ***** Enter the desired characteristic polynomial by% defining the following matrix J and computingpoly(J) *****J=[-1.8+2.4*i 0;0 -1.8-2.4*i];Poly(J)ans=1.000 3.6000 9.0000% ***** Enter characteristic polynomial Phi *****Phi=polyvalm(poly(J),A);% ***** State feedback gain matrix K can be given by ***** K=[0 1]*inv(Q)*PhiK=29.6000 3.6000% ***** The following program determines the observer matrix Ke *****% ***** Enter the observability matrix RT and check its rank *****RT=[C’ A’*C’];rank(RT)ans=2% ***** Since the rank of the observability matrix is 2, design of% the observer is possible *****% **** Enter the desired characteristic polynomial by defining % the following matrix J0 and entering statement poly(JO) *****JO=[-8 0;0 -8];Poly(JO)ans=1 16 64% ***** Enter characteristic polynomial Ph ***** Ph=polyvalm(ply(JO),A);% ***** The observer gain matrix Ke is obtained from ***** Ke=Ph*(inv(RT’))*[0;1]Ke=16.000084.60000求出的状态反馈增益矩阵K 为[]6.36.29=K观测器增益矩阵e K 为⎥⎦⎤⎢⎣⎡=6.8416e K 该观测-状态反馈控制系统是4阶的,其特征方程为0=+−+−C K A sI BKA sI e通过将期望的闭环极点和期望的观测器极点代入上式,可得5764.3746.1306.19)8)(4.28.1)(4.28.1(2342++++=+++−+=+−+−s s s s s j s j s C K A sI BK A sI e这个结果很容易通过MATLAB得到,如MATLAB Program 2所示(MATLAB Program 2是K已MATLAB Program1的继续。
《自动控制原理》线性定常系统的状态观测器

A
BK − HC
x
x −
xˆ
+
B0 v
(9-243a)
y = C
0x
x −
xˆ
(9-243b)
由于线性变换后系统传递函数矩阵具有不变性,由式(9-282)可导
出系统传递函数矩阵
G(s) = C
0sI
−
(
A− 0
BK
)
− BK −1 B
sI − ( A − HC)
0
(9-244)
利用分块矩阵求逆公式
(9-247)
的传递函数矩阵。这说明复合系统与状态反馈子系统具有相同的传
递特性,与观测器部分无关,可用估值状态 xˆ 代替真实状态 x 作为
反馈。2n维复合系统导出了(n n) 传递矩阵,这是由于 (x − xˆ) 的不
可控造成的。
由于线性变换后特征值具有不变性,由式(9-243)易导出其特征值 满足关系式
x1
尽快逼
近 x1 。用降维状态观测器实现状态反馈的原理结构图如图9—35所
示。由图可得降维状态观测器动态方程
x1 = A11 x1 + v − H (zˆ − z), zˆ = A21 x1
(9—342)
式中H为(n − q) q 矩阵。
图9—35 用降维观测器实现状态反馈原理结构图 分离定理同样适用于降维状态观测器(证明略)。
9-7 线性定常系统的状态观测器
一、引言 ➢被控系统可控时可以利用状态反馈任意配置闭环极点 ➢实现状态反馈的条件之一:状态变量可以用传感器测量
➢问题:不能用传感器测量时 怎么办?
➢ 实现状态反馈的条件之二:所有状态变量可以由 u, y 观测
➢ 状态观测器:用已知的输入和可测量的输出观测或构造状态 又称状态估计器,状态重构器
状态重构问题与Luenberger状态观测器讲述

5.5 状态重构问题与Luenberger状态观测器前已指出,对于状态完全能控的线性定常系统,可以通过线性状态反馈任意配置闭环系统的极点。
事实上,不仅是极点配置,而且系统镇定、解耦控制、线性二次型最优控制 (LQ)问题等,也都可由状态反馈实现。
然而,在5.2 节介绍极点配置方法时,曾假设所有的状态变量均可有效地用于反馈。
但在实际情况中,并非所有的状态度变量都可用于反馈。
这时需要估计不可量测的状态变量。
迄今已有多种无需使用微分来估计不能量测状态的方法。
对不能量测状态变量的估计通常称为观测。
估计或者观测状态变量的动态系统称为状态观测器,或简称观测器。
观测器分为全维状态观测器降维状态观测器最小阶状态观测器或最小阶观测器5.5.1 问题的提法在下面有关状态观测器的讨论中,我们用x ~表示被观测的状态向量。
在许多实际情况中,一般将被观测的状态向量用于状态反馈,以便产生期望的控制输入。
考虑如下线性定常系统Bu Ax x += (5.27)Cx y =(5.28)假设状态向量x 可由如下动态方程)~(~~x C y K Bu x A x e -++=(5.29)中的状态x ~来近似,则该式表示状态观测器,其中e K 称为观测器的增益矩阵。
注意到状态观测器的输入为y 和u ,输出为x ~。
式(5.29)中右端最后一项包括可量测输出y 与估计输出x ~C 之差的修正项。
矩阵e K 起到加权矩阵的作用。
修正项监控状态变量x ~。
当此模型使用的矩阵A 和B 与实际系统使用的矩阵A 和B 之间存在差异时,由于动态模型和实际系统之间的差别,该附加修正项将减小这些影响。
图5.5所示为带全维状态观测器的系统方块图。
图5.5 全维状态观测器方块图5.5.2 全维状态观测器的误差方程在此讨论的状态观测器的阶数和系统的阶数相等。
假设系统由式(5.27)和(5.28)定义。
观测器的方程由式(5.29)定义。
为了得到观测器的误差方程,将式(5.27)减去式(5.29),可得)~(~~x C Cx K x A Ax x x e ---=- )~)((x x C K A e --= (5.30)定义x 与x ~之差为误差向量,即 x x e ~-=则式(5.30)可改写为e C K A e e )(-= (5.31)由式(5.31)可看出,误差向量的动态特性由矩阵C K A e -的特征值决定。
实验 6 极点配置与全维状态观测器的设计

实验 6 极点配置与全维状态观测器的设计一、实验目的1. 加深对状态反馈作用的理解。
2. 学习和掌握状态观测器的设计方法。
二、实验原理在MATLAB 中,可以使用acker 和place 函数来进行极点配置,函数的使用方法如下:K = acker(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵。
K = place(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵。
[K,PREC,MESSAGE] = place(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵,PREC 为特征值,MESSAGE 为配置中的出错信息。
三、实验内容1.已知系统(1)判断系统稳定性,说明原因。
(2)若不稳定,进行极点配置,期望极点:-1,-2,-3,求出状态反馈矩阵k。
(3)讨论状态反馈与输出反馈的关系,说明状态反馈为何能进行极点配置?(4)使用状态反馈进行零极点配置的前提条件是什么?1.(1)(2)代码:a=[-2 -1 1;1 0 1;-1 0 1];b=[1,1,1]';p=[-1,-2,-3]';K=acker(a,b,p)K =-1 2 4(3)讨论状态反馈与输出反馈的关系, 说明状态反馈为何能进行极点配置?在经典控制理论中,一般只考虑由系统的输出变量来构成反馈律,即输出反馈。
在现代控制理论的状态空间分析方法中,多考虑采用状态变量来构成反馈律,即状态反馈。
从状态空间模型输出方程可以看出,输出反馈可视为状态反馈的一个特例。
状态反馈可以提供更多的补偿信息,只要状态进行简单的计算再反馈,就可以获得优良的控制性能。
(4)使用状态反馈配置极点的前提是系统的状态是完全可控的。
2.已知系统设计全维状态观测器,使观测器的极点配置在12+j,12-j 。
(1)给出原系统的状态曲线。
(2)给出观测器的状态曲线并加以对比。
(观测器的初始状态可以任意选取)观察实验结果,思考以下问题:(1)说明反馈控制闭环期望极点和观测器极点的选取原则。
现代控制理论习题之状态观测设计
对应于原系统的观测器矩阵: ⎡0 ⎤ ⎡0 ⎤ P1 = V0 −1 ⎢ ⎥ = ⎢ ⎥, Po = [ p1 ⎣1 ⎦ ⎣1 ⎦
u
∑ ( A, B, C )
y
6.5
2
1 x
x1
15.3 x
x3
题 6-2 图 1
(2) 确定降维观测器的维数:m=1,n=3,则 n-m= 2。 分解输出系数矩阵 c,获得线性变换矩阵 T,对原状态空间表达式进行线性变换,使 各输出变量 y 变成各状态变量的单值函数:
f *(s) = (s + 3)(s + 4) = s2 + 7s +12 ⎡s 0⎤ ⎡−1 −1⎤ ⎡l1⎤ f (s) = sI − (A22 − LA 12) = ⎢ ⎥ −⎢ ⎥ + ⎢ ⎥[− 2 − 4] ⎣0 s⎦ ⎣−1 −1⎦ ⎢ ⎣l2⎥ ⎦ = s2 + (−4l2 − 2l1 + 2)s + (2l1 − 2l2) ⎡l ⎤ ⎡ 3.1667⎤ f *(s) = f (s) ⇒ L = ⎢ 1⎥ = ⎢ ⎥ ⎢l2⎦ ⎥ ⎣− 2.8333 ⎦ ⎣
系统能观,可设计观测器。 求希望特征多项式:
f * ( s ) = ( s + 3)( s + 4)( s + 5) = s 3 + 12 s 2 + 47 s + 60
求观测器特征多项式:
f ( s ) = sI − A + LC
状态观测器
5.4 状态观测器从前面几节看出,要实现闭环极点的任意配置,离不开状态反馈,然而系统的状态变量并不都是易于直接能检测得到的,有些状态变量甚至根本无法检测。
这样,就提出所谓状态观测或者状态重构问题。
由龙伯格(Luenberger )提出的状态观测器理论,解决了在确定性条件下受控系统的状态重构问题,从而使状态反馈成为一种可实现的控制律。
至于在噪声环境下的状态观测将涉及随机最优估计理论。
本节只介绍在无噪声干扰下,单输入—单输出系统状态观测器的设计原理和方法。
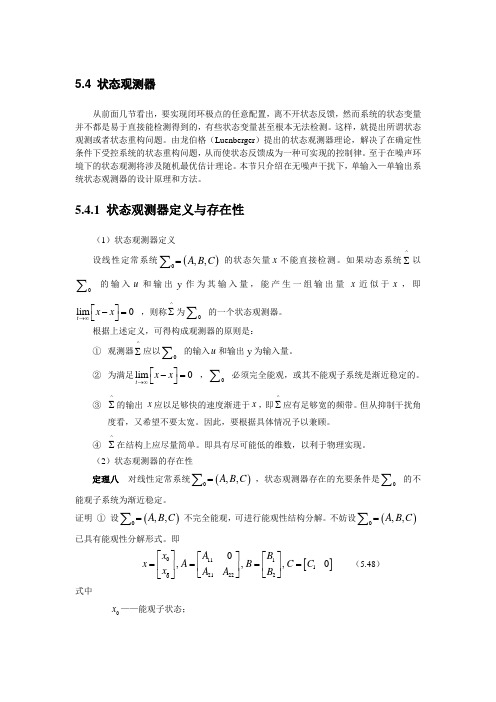
5.4.1 状态观测器定义与存在性(1)状态观测器定义 设线性定常系统()0,,A B C =∑的状态矢量x 不能直接检测。
如果动态系统^∑以∑的输入u 和输出y 作为其输入量,能产生一组输出量x 近似于x ,即lim 0t x x →∞⎡⎤-=⎣⎦,则称^∑为0∑的一个状态观测器。
根据上述定义,可得构成观测器的原则是: ① 观测器^∑应以∑的输入u 和输出y 为输入量。
② 为满足lim 0t x x →∞⎡⎤-=⎣⎦,∑必须完全能观,或其不能观子系统是渐近稳定的。
③ ^∑的输出x 应以足够快的速度渐进于x ,即^∑应有足够宽的频带。
但从抑制干扰角度看,又希望不要太宽。
因此,要根据具体情况予以兼顾。
④ ^∑在结构上应尽量简单。
即具有尽可能低的维数,以利于物理实现。
(2)状态观测器的存在性 定理八 对线性定常系统(),,A B C =∑,状态观测器存在的充要条件是∑的不能观子系统为渐近稳定。
证明 ① 设()0,,A B C =∑不完全能观,可进行能观性结构分解。
不妨设(),,A B C =∑已具有能观性分解形式。
即[]011112122200,,,0x A B x A B C C x A A B ⎡⎤⎡⎤⎡⎤====⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦(5.48) 式中0x ——能观子状态;0x ——不能观子状态; 1111(,,)A B C ——能观子系统; 222(,,0)A B ——不能观子系统。
5.5状态观测器设计
N =B, K =E
于是得到一特定的n 维KX 观测器。
⎧ z& = ( A − LC )z + Bu + Ly
⎨ ⎩W
=
Kz
(5-35)
称此为∑ 的一个全维KX观测器;K=I为 ∑ 的一个全维状态观测
器.
因为满足结构条件的L 不唯一,全维观测器也不唯一。全6 维
观测器设计较简单。
5.5.2 全维状态观测器设计
⎨ ⎩
W = Ez
(5-34)
称为全维观测器。
若 r < n ,M ≠ 0 ,相应观测器称为降维观测器。
对 r = n 全维观测器,参数除按通常步骤外,有特定取法:
F = A − LC ,
G=L
则 PA− FP = PA− (A − LC)P = PA− AP + LCP = LC
有 P = In 从而
y = [1 1 0 ] x
设计特征值为-3,-3和-4的全维状态观测器.
解:
⎡c⎤
⎡1 1 0⎤
rank
⎢ ⎢
cA
⎥ ⎥
=
rank
⎢ ⎢
−1
−3
−1⎥⎥ = 3 = n
8
⎢⎣cA2 ⎥⎦
⎢⎣ 0 5 0 ⎥⎦
可知系统完全观测.
⎡−1 0 1 ⎤
⎡1⎤
A
=
AT
=
⎢ ⎢
−
2
−1
0
⎥ ⎥
,
b
= cT
=
完全能控
⎡ 1 0 0⎤ ⎡0 −1 1⎤ ⎡1 0 0⎤ ⎡ 2 2 1⎤
P = ⎡⎣ A2b Ab b ⎤⎦ ⎢⎢α 2
1
9-5线定常性系统的反馈结构及状态观测器
将输出量反馈给状态微分的输出反馈系统结 构图。
u
B + +
x
+
∫ A
x
C
y
H
输出反馈(少见)系统的状态空间描述为 ( A HC ) x B u ;y C x ; x 特征多项式: (s) det (s I A HC ); 传递函数矩阵: GF (s) C (sI A HC ) B;
4
1
状态反馈结构与输出反馈结构比较 无论是状态反馈结构还是输出反馈结构都使 闭环系统的系统矩阵不同于原系统矩阵 A 。 设计者可以通过选取适当的反馈矩阵 K 或 F 来改变系统的特性,达到设计要求。 对于任意的F,都能计算出对应的K=FC,这 表明输出反馈能完成的设计任务,状态反馈必然 能够完成; 对给定的K,一般不能计算出对应的F,这表 明状态反馈能完成的设计任务,输出反馈不一定 能完成。 若rankC=n,则有F=KCT(CCT)-1,即输出反馈 能够完成状态反馈所能完成的任务。
u r F y r FC x 由于被控对象的内部状态往往不能全部直接 量测,状态反馈的应用受到限制;而对象的输出 是外部变量,总是可以直接检测的,采用输出反 馈是一种补充措施。u 输出反馈系统的结构图 r F y r FC x。 y r u x x ∫ B C
(b) 输出反馈
5
(2) 反馈结构对系统性能的影响
(a) 对系统的可控性和可观测性的影响 定理9-1 状态反馈不改变系统的可控性,但可能 改变系统的可观测性。
证明:可控性不变,
In 0 ; U PBH [(s I A) B ] [( s I A BK ) B ] K I p rank [(s I A BK ) B ] rank U PBH 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
所示。
u
x2
1 x2 s
3
1 x1 s
2
2
y
受控对象 部分
23.5
8.5
ˆ2 1 x s
3
1 s
ˆ1 x
2
ˆ y
状态观测器部分
2
图 9.24 例 9.47 全维状态观测器及受控对象状态变量图
Байду номын сангаас
(2) 给定极点对应的期望特征方程
( 10) 2 2 20 100 0
(3) 设观测器输出反馈阵 H h1
(9.203)
h2 ,则观测器系统矩阵为
T
1 h1 2h1 0 A HC 2 0 2 3 h2 2 2h2
观测器特征方程
1 3
(9.204)
I ( A HC) 2 (2h1 3) (6h1 2h2 2) 0
比较式(9.203)和(9.204)各对应项系数,有
2h1 3 20 6h1 2h2 2 100 h1 8.5, h2 23.5
全维状态观测器例
【例 9.47】 已知受控对象传递函数
Y ( s) 2 U ( s) ( s 1)( s 2)
试设计全维状态观测器,将观测器极点配置在-10,-10。 解: (1) 可观性判别 传递函数无零极点对消,故系统可控、可观测。若写出可控标准形实现,则
1 0 0 , b , C 2 0 A 2 3 1