动点运动的轨迹
七年级几何动点知识点

七年级几何动点知识点
几何学中,动点是指在空间中不断移动的点,与静态点相比,它具有更加丰富的几何性质。
在七年级几何学习中,了解动点的概念及特性是非常重要的。
本文将为您介绍七年级几何动点知识点。
一、动点的定义
动点是指在空间中不断移动的点。
它不同于静态点,它可以沿直线或曲线做任意运动。
二、动点的特性
1. 动点的轨迹:动点按照一定轨迹运动,其轨迹可以是一条直线、一条曲线或者是一些点的集合。
2. 动点的运动方向:动点的运动方向可以是直线或曲线,也可以是退化成点。
3. 动点的运动速度:动点可以以任意速度进行运动。
4. 动点的终止条件:动点可以在任意时刻停止运动。
三、动点的应用
动点不仅仅是一个几何概念,它还具有广泛的应用。
下面将为
您介绍动点在几何学中的应用。
1. 动点应用于轨迹绘制:几何学中的轨迹绘制就是一个动点的
概念,可以通过动点的运动绘制出轨迹来,如绘制圆、椭圆、双
曲线等等。
2. 动点应用于自由曲面绘制:在几何学中,自由曲面是由两个
动点所生成的曲面,其中每个动点的运动轨迹与另一个动点平行。
3. 动点应用于轴对称图形的绘制:轴对称图形是通过一个动点
的轨迹复制生成的图形,这种图形在几何学中应用广泛。
4. 动点应用于直线交叉产生角度:几何学中的角度定义是两条
直线交叉所产生的角度,这个概念就是通过动点来生成的。
综上所述,动点是在几何学中不可或缺的概念,掌握了动点的应用,可以更好地理解几何学中的概念,更好地解决问题。
希望本文能对您有所帮助。
§11-2研究点的运动的自然坐标法
υ=
ds = 2t − 4 dt
t=3=2×3-4=2(cm/s)
在第3s时 υ|
点的切向加速度为
dυ aτ = = 2(cm / s 2 ) dt
切向加速度为常数,即第3s时切向加速度为2cm/s² 第3s时点的法向加速度为
22 2 an = = = 0.8(cm / s ) R 5
υ2
aτ = lim ∆υ τ ∆t r = lim
当∆t→0时 ∆t→
r
r
r
r
υ1 − υ
∆t
r
r = lim
∆υ dv = ∆t dt
(11-9)
它的方向为∆t→0时∆Vτ的方向即为M点的切线方向aτ方向又叫切向加速度。 当aτ和υ同号时,动点的运动方向和加速方向一致,动点作加速运动。当aτ和υ异 号时,动点的运动方向和加速方向相反,动点作减速运动。
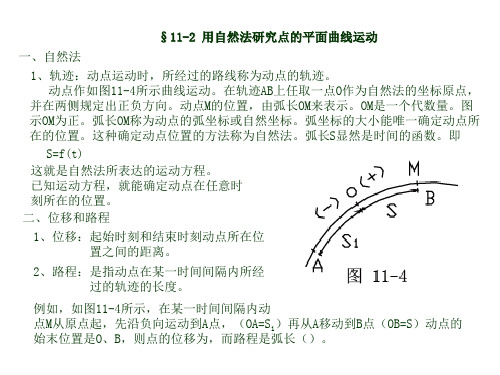
§11-2 用自然法研究点的平面曲线运动 11一、自然法 1、轨迹:动点运动时,所经过的路线称为动点的轨迹。 动点作如图11-4所示曲线运动。在轨迹AB上任取一点O作为自然法的坐标原点, 并在两侧规定出正负方向。动点M的位置,由弧长OM来表示。OM是一个代数量。图 示OM为正。弧长OM称为动点的弧坐标或自然坐标。弧坐标的大小能唯一确定动点所 在的位置。这种确定动点位置的方法称为自然法。弧长S显然是时间的函数。即 S=f(t) 这就是自然法所表达的运动方程。 已知运动方程,就能确定动点在任意时 刻所在的位置。 二、位移和路程 1、位移:起始时刻和结束时刻动点所在位 置之间的距离。 2、路程:是指动点在某一时间间隔内所经 过的轨迹的长度。 例如,如图11-4所示,在某一时间间隔内动 点M从原点起,先沿负向运动到A点,(OA=S1)再从A移动到B点(OB=S)动点的 始末位置是O、B,则点的位移为,而路程是弧长()。
怎样求动点的轨迹方程

思路探寻在解题时,我们经常会遇到求动点的轨迹方程问题.此类问题主要考查圆锥曲线的定义、图形以及几何性质,对同学们的想象与计算能力都有较高的要求.在解答此类问题时,需根据题目中所给的条件建立起各个变量之间的联系,得到关于动点的关系式,进而求得动点的轨迹方程.本文主要谈一谈动点的轨迹方程的几种求法.一、直接法直接法是求动点的轨迹方程的基本方法.通常要先设出动点的坐标;然后根据题目中所给的条件,利用相关的公式、定义、性质列出有关动点坐标的关系式;再通过化简、消元、变形,得到动点的轨迹方程;最后验证所得的结果是否满足题目的条件.例1.已知两定点A (-2,0),B (2,0),动点P 满足 PA ∙PB =0.由点P 向x 轴作垂线PQ ,垂足为Q ,若 PM = MQ ,求点M 的轨迹方程.解:设M (x ,y ),P (x 1,y 1),则Q (x 1,0),因为 PA ∙PB =0,所以x 12+y 12=4.因为PM ⊥x 轴, PM = MQ ,所以x 1=x ,y 1=2y ,所以点P 的坐标为(x ,2y ).又因为点P在圆x 12+y 12=4上,所以x 2+4y 2=4,所以点M 的轨迹方程为x 24+y 2=1.本题较为简单,可采用直接法求解.题目的条件中已明确给出了动点的几何关系,只要设出动点的坐标,根据已知条件建立关于点M 的坐标的关系式,即可得到点M 的轨迹方程.二、相关点法若一动点P 随着另一动点Q 的变化而变化,且已知另一动点Q 的运动轨迹,就可以利用相关点法,根据另一动点Q 的轨迹来求得动点P 的轨迹方程.在解题时,需先建立两个动点坐标之间的联系,求得另一动点Q 的轨迹方程;然后用动点P 的坐标表示相关点Q 的坐标,将其代入相关点Q 的轨迹方程,即可求得动点P 的轨迹方程.例2.从圆x 2+y 2=1上的任意一点P 向y 轴作垂线,求该垂线段中点M 的轨迹方程.解:设点P 为(x 0,y 0),点M 为(x ,y ),由题意知:ìíîïïx =x 02,y =y 0,即{x 0=2x ,y 0=y .因为点P 在圆上,所以x 02+y 02=1,可得4x 2+y 2=1,所以点M 的轨迹为椭圆,其轨迹方程为4x 2+y 2=1.分析题意可知,点M 随着点P 的变化而变化,需采用相关点法解答.先设出点M 和P 的坐标,并根据二者之间的联系建立关系式;然后用点M 的坐标表示P 点,通过P 点的轨迹方程间接求得M 点的轨迹方程.三、交轨法如果动点是两条曲线的交点,就可以采用交轨法来求动点的轨迹方程.先选出一个适当的参数表示动点;再根据题目中的条件建立关于参数的式子;然后通过恒等变换,逐步消去参数,得到所求点的轨迹方程.例3.已知动点P 在直线l :x -y -2=0上运动,过P 点作抛物线C :y =x 2的两条切线PA ,PB ,与抛物线C分别相切于A ,B 两点,求△APB 的重心G 的轨迹方程.解:设切点A ,B 的坐标分别为(x 1,x 12)和(x 2,x 22),则切线PA ,PB 的方程分别为:2x 1x -y -x 12=0,2x 2x -y -x 22=0,可得x p =x 1+x 22,y p =x 1x 2.设G 的坐标为(x ,y ),根据三角形重心的坐标公式可得:x =x 1+x 2+xp 3=x p ①,y =y 1+y 2+y p 3=4x p 2-y p3②.又因为点P 在直线l :x -y -2=0上运动,所以x p -y p -2=0③,由①②③可得△APB 的重心G 的轨迹方程是:y =43x 2-13x +23.解答本题,首先要根据题目中所给的条件设出切点的坐标,通过对抛物线的方程求导,得到切线的方程,并求出点P 的坐标;然后设出重心G 的坐标,根据中点的坐标公式和重心的坐标公式建立关系式,即可利用交轨法求得重心G 的轨迹方程.求动点的轨迹方程问题的难度往往不大,但解题时的计算量较大,同学们在解题时要谨慎计算,注意检验,避免出错.(作者单位:江苏省南通市海门四甲中学)史玉蕾48Copyright ©博看网. All Rights Reserved.。
例谈动点的轨迹方程的四种求法

思路探寻求动点的轨迹方程问题经常出现在解析几何试题中,这类问题侧重于考查同学们的推理、分析以及运算能力.求解这类问题的主要方法有定义法、参数法、相关点法和交轨法.下面结合实例,谈一谈这四种方法的特点以及应用技巧.一、定义法定义法是指运用圆锥曲线的定义解题.若发现动点的轨迹形如椭圆、圆、双曲线、抛物线或其中的一部分曲线,就可以根据椭圆、圆、双曲线、抛物线的定义,确定定点、焦点、焦点与动点之间的关系,求得椭圆、圆、双曲线、抛物线方程中的各个参数,便可以快速确定曲线的轨迹方程.例1.如图1所示,已知圆C1:x2+(y+4)2=25和圆C2:x2+(y-4)2=1,某动圆C分别与圆C1和圆C2外切,求动圆圆心C的轨迹方程.图1解:由题意知两圆的圆心为C1(0,-4),C2(0,4),半径为r1=5,r2=1,设动圆C的半径为r,因为圆C分别与圆C1和圆C2外切,所以||CC1=r+5,||CC2=r+1,所以||CC1-||CC2=4<8,即点C到两定点C1、C2的距离之差为常数4,所以动圆圆心C的轨迹是以C1、C2为焦点的双曲线的上支,可得2a=4,2c=||C1C2=8,所以b2=c2-a2=12.所以动圆圆心C的轨迹方程是y24-x212=1(y≥2).结合图形分析动圆C与圆C1、圆C2的位置关系,即可发现||CC1=r+5,||CC2=r+1,即可得出||CC1-||CC2=4<8,由此可联想到双曲线的定义,即平面内到两定点的距离之差为定值的点的轨迹,确定动点的轨迹,求得a、b、c值,即可求得动点的轨迹方程.二、参数法参数法是解答数学问题的重要方法.若动点受某些变量的影响,而我们又无法确定这些变量的取值,则需运用参数法,即用参数表示出变量,设出直线的斜率、点的坐标、曲线的方程等,然后将其代入题设中,建立关系式,通过恒等变换消去参数,即可求得动点的轨迹方程.例2.已知抛物线y2=4px(p>0)的顶点为O,A,B是抛物线上的两个动点,且OA⊥OB,OM⊥AB于点M,求点M的轨迹方程.解:设M(x,y),直线AB的方程为y=kx+b,因为OA⊥OB,所以k=-xy,由ìíîy2=4px,y=kx+b,得k2x2+(2kb-4p)x+b2=0,所以x1x2=-b2k2,y1y2=-4pb k,因为OA⊥OB,所以y1y2=-x1x2,所以-4pbk=-b2k2,即b=-4kp,所以直线AB的方程为y=kx+b=k(x-4p),将k=-xy代入,得x2+y2-4px=0(x≠0),即所求点M的轨迹方程为x2+y2-4px=0(x≠0).解答本题主要运用了参数法,即先引入参数x、y,49k 、b 、x 1、x 2、y 1、y 2,设出动点M 的坐标、直线AB 的方程以及A 、B 两点的坐标;然后将直线与抛物线的方程联立,根据一元二次方程的根与系数的关系建立关系式;最后通过恒等变换消去参数,得到关于x 、y 的方程,即为动点的轨迹方程.三、相关点法若两个动点之间存在某种特定的关系,则可以采用相关点法求解.先分别设出两个动点的坐标,并根据二者之间的关系,用所求动点的坐标表示另一个动点的坐标;然后根据另一个动点的几何关系,建立关于所求动点坐标的关系式,从而求得动点的轨迹方程.运用相关点法解题,要注意寻找两个动点之间的联系,并确定另一个动点所满足的几何关系.例3.如图2所示,在圆x 2+y 2=4上任意选取一点P ,过点P 作x 轴的垂线段PD ,D 为垂足,求线段PD中点M 的轨迹方程.图2解:设点M (x ,y ),P (x 0,y 0),因为M 为线段PD 的中点,所以ìíîïïx =x 0,y =y 02,得{x 0=x ,y 0=2y ,又因为点P (x 0,y 0)在圆x 2+y 2=4上,所以x 02+y 02=4,将{x 0=x ,y 0=2y ,代入上述方程中,得x 24+y 2=1,所以点M 的轨迹为一个椭圆,其方程为x 24+y 2=1.本题中P 、M 均为动点,且点M 随着点P 的运动而变化,需采用相关点法求解,先分别设出P 、M 两点的坐标;然后用M 点的坐标表示P 的坐标;再将其代入点P 的轨迹方程,即可确定点M 的轨迹及其方程.四、交轨法当问题中所求的动点为两条动曲线的交点时,往往需采用交轨法,即将两条动曲线的方程联立,消去其中的参数,得到的关于x 、y 的方程即为所求的动点的轨迹方程.例4.如图3所示,已知双曲线C :y 24-x 23=1与y轴交于点A 1(0,-2)与点A 2(0,2),直线l :y =m 与双曲线交于点P ,Q ,直线A 1P 与直线A 2Q 相交于点M ,试求点M 的轨迹方程.图3解:设P (x 1,m ),Q (-x 1,m ),M (x ,y ),因为点P 在双曲线上,所以m 24-x 123=1.当x 1≠0时,直线PA 1的方程为y +2=m +2x 1x ,直线QA 2的方程为y -2=2-m x 1x,可得y 2-4=4-m 2x 12x 2,所以x 12=3m 2-124,将其代入y 2-4=4-m 2x 12x 2,得y 2-4=-43x 2,化简整理得y 24+x 23=1.当x 1=0时,点M 的坐标满足方程y 24+x 23=1.综上所述,点M 的轨迹方程为y 24+x 23=1.仔细分析题意可知,M 为直线A 1P 与直线A 2Q 的交点,且点A 1、A 2、P 、Q 都满足双曲线的方程,于是采用交轨法,求得两动直线A 1P 与A 2Q 的方程,再将两方程联立,消去参数,即可求出交点M 的轨迹方程.总之,求动点的轨迹方程,关键是要根据题目中的几何条件,寻找动点的横坐标与纵坐标之间的关系,建立关于动点的横坐标与纵坐标的方程.求动点的轨迹方程的方法很多,同学们需熟练掌握一些常用方法的特点、适用情形、解题思路,才能将其灵活地应用于解题中.(作者单位:江苏省南通市海门实验学校)思路探寻50。
动点轨迹方程求解的常见方法
动点轨迹方程求解的常见方法符合一定条件的动点所形成的图形,或者说,符合一定条件的点的全体所组成的集合,叫做满足该条件的点的轨迹.轨迹,包含两个方面的问题:凡在轨迹上的点都符合给定的条件,这叫做轨迹的纯粹性(也叫做必要性);凡不在轨迹上的点都不符合给定的条件,也就是符合给定条件的点必在轨迹上,这叫做轨迹的完备性(也叫做充分性).轨迹方程就是与几何轨迹对应的代数描述。
轨迹方程就是与几何轨迹对应的代数描述。
符合一定条件的动点所形成的图形,或者说,符合一定条件的点的全体所组成的集合,叫做满足该条件的点的轨迹。
重点要掌握常用求轨迹方法,难点是轨迹的定型及其纯粹性和完备性的讨论。
动点轨迹方程求解的常见方法一、动点轨迹方程解题步骤1、建系——建立适当的坐标系,设出动点M的坐标;2、设点——设轨迹上的任一点P(x,y),写出点P的集合;3、列式——列出动点p所满足的关系式;4、代换——依条件的特点,选用距离公式、斜率公式等将其转化为关于X,Y的方程式,化简方程为最简形式;5、证明——证明所求方程即为符合条件的动点轨迹方程。
二、动点轨迹方程求解常见的6种方法动点轨迹方程的求解方法有多种,常用的有直译法、定义法、相关点法、参数法和交轨法等。
1、直译求解法:直接将条件翻译成等式,整理化简后即得动点的轨迹方程,这种求轨迹方程的方法通常叫做直译法。
如果动点P的运动规律是否合乎我们熟知的某些曲线的定义难以判断,但点P满足的等量关系易于建立,则可以先表示出点P所满足的几何上的等量关系,再用点P的坐标(x,y)表示该等量关系式,即可得到轨迹方程。
根据已知条件及一些基本公式如两点间距离公式,点到直线的距离公式,直线的斜率公式等,直接列出动点满足的等量关系式,从而求得轨迹方程。
2、定义求解法:如果能够确定动点的轨迹满足某种已知曲线的定义,则可利用曲线的定义写出方程,这种求轨迹方程的方法叫做定义法。
待定系数法:如果动点P的运动规律合乎我们已知的某种曲线(如圆、椭圆、双曲线、抛物线)的定义,则可先设出轨迹方程,再根据已知条件,待定方程中的常数,即可得到轨迹方程,也有人将此方法称为定义法。
几何动点运动轨迹及最值
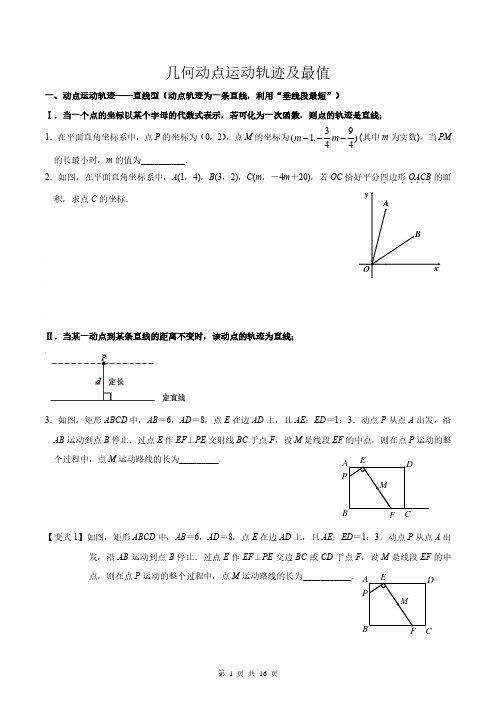
几何动点运动轨迹及最值一、动点运动轨迹——直线型(动点轨迹为一条直线,利用“垂线段最短”)Ⅰ.当一个点的坐标以某个字母的代数式表示,若可化为一次函数,则点的轨迹是直线; 1.在平面直角坐标系中,点P 的坐标为(0,2),点M 的坐标为39(1,)44m m −−−(其中m 为实数),当PM 的长最小时,m 的值为__________.2.如图,在平面直角坐标系中,A (1,4),B (3,2),C (m ,-4m +20),若OC 恰好平分四边形...OACB ....的面积,求点C 的坐标.Ⅱ.当某一动点到某条直线的距离不变时,该动点的轨迹为直线;3.如图,矩形ABCD 中,AB =6,AD =8,点E 在边AD 上,且AE :ED =1:3.动点P 从点A 出发,沿AB 运动到点B 停止.过点E 作EF ⊥PE 交射线BC 于点F ,设M 是线段EF 的中点,则在点P 运动的整个过程中,点M 运动路线的长为_________.【变式1】如图,矩形ABCD 中,AB =6,AD =8,点E 在边AD 上,且AE :ED =1:3.动点P 从点A 出发,沿AB 运动到点B 停止.过点E 作EF ⊥PE 交边BC 或CD 于点F ,设M 是线段EF 的中点,则在点P 运动的整个过程中,点M 运动路线的长为___________.ABDCEFPM ABDCEFPM yxBAO【变式2】如图,在矩形ABCD 中,点P 在AD 上,AB =2,AP =1,E 是AB 上的一个动点,连接PE ,过点P 作PE 的垂线,交BC 于点F ,连接EF ,设EF 的中点为G ,当点E 从点B 运动到点A 时,点G 移动的路径的长是_________.【变式3】在矩形ABCD 中,AB =4,AD =6,P 是AD 边的中点,点E 在AB 边上,EP 的延长线交射线CD于F 点,过点P 作PQ ⊥EF ,与射线BC 相交于点Q .(1)如图1,当点Q 在点C 时,试求AE 的长; (2)如图2,点G 为FQ 的中点,连结PG . ①当AE =1时,求PG 的长;②当点E 从点A 运动到点B 时,试直接写出线段PG 扫过的面积. 变式3图14.如图,C 、D 是线段AB 上两点,且AC =BD =16AB =1,点P 是线段CD 上一个动点,在AB 同侧分别作等边△P AE 和等边△PBF ,M 为线段EF 的中点。
动点在定直线上轨迹方法

动点在定直线上轨迹方法在数学领域中,研究动点在定直线上的轨迹问题是一项有趣且具有挑战性的任务。
本文将详细介绍一种求解动点在定直线上轨迹的方法,帮助读者更好地理解这一数学问题。
一、问题背景在数学中,动点在定直线上的轨迹问题是指在一定条件下,动点在直线上的运动路径。
求解这类问题有助于我们了解动点的运动规律,为实际问题提供理论依据。
下面,我们将介绍一种求解此类问题的一般方法。
二、轨迹方法1.建立坐标系首先,我们需要在定直线上建立一个合适的坐标系。
通常情况下,我们可以选择定直线为x轴或y轴,以便简化问题。
坐标系建立后,我们可以用坐标表示动点的位置。
2.设定动点运动方程设动点的初始位置为P0(x0, y0),运动时间为t,速度为v,动点的运动方程可以表示为:x = x0 + vxty = y0 + vyt其中,vx和vy分别为动点在x轴和y轴方向上的速度分量。
3.引入约束条件在动点运动过程中,可能存在一些约束条件,如动点在某一时刻必须经过某一点,或者动点在某一段时间内速度保持不变等。
根据实际问题,我们需要引入这些约束条件,从而确定动点的轨迹。
4.求解轨迹方程根据动点的运动方程和约束条件,我们可以求解出动点的轨迹方程。
具体步骤如下:(1)将动点的运动方程代入约束条件中,得到关于t的方程。
(2)解出t的值,将其代入动点的运动方程,得到动点在各个时刻的位置坐标。
(3)将所有位置坐标连成一条曲线,即为动点在定直线上的轨迹。
三、实例分析假设有一动点P,初始位置为P0(0, 1),在x轴上以速度v = 1m/s匀速运动,求动点在y = 1这条直线上的轨迹。
1.建立坐标系以y = 1为x轴,建立坐标系。
2.设定动点运动方程x = ty = 13.求解轨迹方程由于动点在y = 1这条直线上运动,所以轨迹方程为:y = 1四、总结本文介绍了求解动点在定直线上轨迹的一种方法,通过建立坐标系、设定动点运动方程、引入约束条件和求解轨迹方程等步骤,可以有效地解决这类问题。
求动点的轨迹方程常用的四种方法

O
x
这个式子说明动点P到定点O , A的距离之差的绝 对值等于2(小于|OA|);所以点P的轨迹是双曲线。
该双曲线的两焦点为O , A(4, 0) ,中心在线段OA的中点 O(2, 0) 此时c = 2 , a = 1,所以 b 3 所以所求的双曲线方程为:
O
2
y
y ( x 2) 1 3
这样就有点M到点A的距离等于点M到 直线 x 2 的距离,这符合抛物线的定 O 义,所以点M的轨迹就是以点A为焦点, x 2 以直线 x 2为准线的抛物线。
A
x
即所求的轨迹方程为: y 2 8x( x 0)
或 y 0( x 0)
三、代入法
当主动点P在某曲线 f ( x, y ) 0 上移动时,与P具备相关 关系的因动点M随其移动而形成曲线,求动点M的轨迹 方程 g ( x, y) 0的方法叫代入法。分析关系如下:
例1 已知A、B为两定点,动点M到A与到B的距离比为
Y
1、如图所示建立直角坐标系
2、利用命题所给条件建立等量关系
| MA | | MB |
M ( x, y )
A(a,0)
( x a)2 y 2 ( x a) y
2 2
O
B(a, 0) x
3、把|MA|,|MB|转换代数式
a 2 4c 2 a 2c | CD | 4c c c 2 2 3 3 ( x 1) ( y 2) 1 2 F ( x, 2 y) 2 2 4 2 9( y 3 ) 2 ( x 1) 1 化简得: 4
二、定义法
1、熟练掌握椭圆、双曲线、抛物线的第一、第 二定义;以及初三时学习的六种基本轨迹定义。 2、分析命题给出的条件符合那种曲线的定义。 3、解题步骤:①定形——利用定义确定曲线类型 ②定位——利用条件确定曲线位置 (此时可确定曲线的待定系数方程) ③定大小——求方程中的待定系数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4__. 运动的总路程为__
点拨:在 Rt△AOB 中,∵∠ABO=30°,AO=1,∴AB=2,BO = 22-12= 3,①当点 P 从 O→B 时,如图 1、图 2 所示,点 Q 运动的 路程为 3; ②当点 P 从 B→C 时, 如图 3 所示, 这时 QC⊥AB, 则∠ACQ =90°,∵∠ABO=30°,∴∠BAO=60°,∴∠OQD=90°-60°= CQ CQ 30°,∴cos30°=AQ,∴AQ= =2,∴OQ=2-1=1,则点 Q cos30° 运动的路程为 QO=1;③当点 P 从 C→A 时,如图 3 所示,点 Q 运动的 路程为 QQ′=2- 3;④当点 P 从 A→O 时,点 Q 运动的路程为 AO=1, ∴点 Q 运动的总路程为 3+1+2- 3+1=4,故答案为 4
例3:(2013浙江湖州)如图,已知点A是第一象限内横坐标为2 3 的一个定点,AC⊥x轴于点M,交直线y=-x于点N.若点P是线 段ON上的一个动点,∠APB=30°,BA⊥PA,则点P在线段ON上 运动时,A点不变,B点随之运动.求当点P从点O运动到点N时, 点B运动的路径长是_____________.