EXCEL最小二乘法和最小条件法计算平尺直线度
直线型经验公式和最小二乘法

直线型经验公式与最小二乘法根据“从点到直线距离公式的应用谈起”(李仲来.数学通报.1998年第11期35~37)改编.本节材料仅是该文一部分,有兴趣的同学可阅读全文和相关专业书籍.内容简介:众所周知,过1个点可有无数条直线;过2个不同的点可求出唯一的一条直线;过3个不同的点一般不能求出一条直线.显然,过个不同的点能否求出一条直线的结论一般是否定的.在实际应用中,问题的提法降低为:能否求出一条回归方程(直线经验公式)(1)可以近似地描述这些点的变化趋势就够了.自然地,到(1)应满足点到直线的距离应最短的条件.这是我们想起点到直线的距离公式().那么点到(1)的距离∑/(2)即∑/=最小(3)直观分析(3),从既有绝对值,又有跟式的运算条件下确定参数和可能比较麻烦.从数学常用的手法看,降低条件看一看.如何降低条件哪,在两部分和中去掉前者恐怕不行,因为参数被去掉了;去掉后者两个参数都在.此时(3)变为:∑(4)能否给处(4)的一种比较容易接受的解释?考虑(4)的几何意义,它恰是到(1)平行于轴的距离之和,这样,我们使原问题得到简化.虽然(4)的解释得到了,但有绝对值的运算还是不好解决.再改变条件,使用数学上常见的手段:两边平方,得:最小(5)在(5)式中对和求偏导数(此为高等数学中的概念,看不懂得同学可略过)后,令其为0,解得,,其中,,,此即常用的最小二乘法,具体可参阅专业书籍.例如,部分国家13岁学生数学测验平均分数为(参考消息:1992—04—09,3版)其经验公式为:以上仅是求出回归方程的一种方法,从(3)到(4),从(4)到(5)还有其它的方法解决,不再叙述,有兴趣的同自己去阅读.说明:该问题是点到直线距离的应用;直线型经验公式在实际中有广泛的应用,从而培养学生用数学的意识;在推导过程中蕴含着的丰富的数学思想方法和高超的数学技巧,以及对“距离”的理解对培养学生的数学技能和数学修养很有裨益.。
最小二乘法知识
最小二乘法知识最小二乘法是一种最优化方法,经常用于拟合数据和解决回归问题。
它的目标是通过调整模型参数,使得模型的预测值与观测值之间的差异最小。
最小二乘法的核心思想是最小化误差的平方和。
对于给定的数据集,假设有一个线性模型y = β₀ + β₁x₁ + β₂x₂ + ... +βₙxₙ,其中β₀, β₁, β₂, ... , βₙ 是需要求解的未知参数,x₁, x₂, ... , xₙ 是自变量,y 是因变量。
那么对于每个样本点 (xᵢ, yᵢ),可以计算其预测值ŷᵢ = β₀ + β₁x₁ + β₂x₂ + ... + βₙxₙ,然后计算预测值与实际值之间的差异 eᵢ = yᵢ - ŷᵢ。
最小二乘法的目标是使得误差的平方和最小化,即最小化目标函数 E = ∑(yᵢ - ŷᵢ)²。
对于简单的线性回归问题,即只有一个自变量的情况下,最小二乘法可以通过解析方法求解参数的闭合解。
我们可以通过求偏导数,令目标函数对参数的偏导数等于零,求解出参数的最优解。
然而,对于复杂的非线性回归问题,解析方法通常不可行。
在实际应用中,最小二乘法通常使用迭代方法进行求解。
一种常用的迭代方法是梯度下降法。
梯度下降法通过反复进行参数更新的方式逐步降低目标函数的值,直到收敛到最优解。
具体而言,梯度下降法首先随机初始化参数的值,然后计算目标函数对于每个参数的偏导数,根据偏导数的方向更新参数的值。
迭代更新的过程可以通过下式表示:βₙ = βₙ - α(∂E/∂βₙ)其中,α 是学习率参数,控制每次更新参数的步长。
学习率需要适当选择,过小会导致收敛过慢,过大会导致震荡甚至不收敛。
最小二乘法除了可以用于线性回归问题,还可以用于其他类型的回归问题,比如多项式回归。
在多项式回归中,我们可以通过增加高次项来拟合非线性关系。
同样地,最小二乘法可以通过调整多项式的系数来使得拟合曲线与实际数据更加接近。
除了回归问题,最小二乘法还可以应用于其他领域,比如数据压缩、信号处理和统计建模等。
EXCEL最小二乘法和最小条件法计算平尺直线度

EXCEL最小二乘法和最小条件法计算平尺直线度在Excel中,可以使用最小二乘法和最小条件法进行平尺直线度的计算。
最小二乘法是一种常见的拟合方法,旨在通过拟合直线来找到一组数据的最佳拟合线。
而最小条件法则是通过约束条件来寻找一组数据的最佳拟合线。
首先,我们来介绍最小二乘法。
最小二乘法的基本思想是找到一条直线,使得该直线与真实数据点的距离之和最小化。
在Excel中,我们可以使用线性回归分析工具来进行最小二乘法的计算。
首先,将数据点输入到Excel中的一个列中。
然后,在一个空白单元格中输入以下公式:=LINEST(y_range, x_range, true, true)。
其中,y_range是包含所有y轴数据点的单元格范围,x_range是包含所有x轴数据点的单元格范围。
这个公式将返回一组值,包括斜率、截距和其他统计信息。
接下来,你可以将这些返回值放在一个表格中,其中包括斜率、截距和其他统计信息,如标准误差和相关系数等。
这些统计信息可以帮助你评估拟合线的质量。
最小条件法是另一种求解平尺直线度的方法。
最小条件法认为直线的斜率应该等于数据点的平均斜率,即通过数据点的中心点。
在Excel中,我们可以使用Excel的数据分析工具来进行最小条件法的计算。
首先,选择“数据”选项卡上的“数据分析”。
如果“数据分析”选项不可见,你可能需要启用Excel的数据分析工具包。
在数据分析对话框中选择“回归”选项,然后点击“确定”。
在回归分析对话框中,选择“最小条件法”作为回归类型。
然后,选择包含所有y轴数据点的单元格范围作为“因变量”和包含所有x轴数据点的单元格范围作为“自变量”。
将“常数项”选项设置为“真”,然后点击“确定”。
回归分析工具将返回一组结果,包括斜率、截距和其他统计信息,如标准误差和相关系数等。
这些统计信息可以帮助你评估拟合线的质量。
综上所述,Excel中可以使用最小二乘法和最小条件法来计算平尺直线度。
最小二乘法通过拟合直线来找到最佳拟合线,而最小条件法则通过约束条件来寻找最佳拟合线。
exls表格的计算公式

Excel 表格中有很多计算公式,可以根据需要进行选择和使用。
以下是一些常用的计算公式:
1.求和:可以使用 SUM 函数对一组数值进行求和计算,例如 =SUM(A1:A10)
将对 A1 到 A10 单元格中的数值进行求和。
2.平均值:可以使用 AVERAGE 函数对一组数值进行平均值计算,例如
=AVERAGE(B1:B10) 将对 B1 到 B10 单元格中的数值进行平均值计算。
3.最大值:可以使用 MAX 函数对一组数值进行最大值计算,例如
=MAX(C1:C10) 将对 C1 到 C10 单元格中的数值进行最大值计算。
4.最小值:可以使用 MIN 函数对一组数值进行最小值计算,例如
=MIN(D1:D10) 将对 D1 到 D10 单元格中的数值进行最小值计算。
5.计数:可以使用 COUNT 函数对一组数值进行计数计算,例如
=COUNT(E1:E10) 将对 E1 到 E10 单元格中的数值进行计数。
除了以上常用的计算公式之外,Excel 还提供了很多其他的计算公式和函数,可以根据需要进行选择和使用。
需要注意的是,在使用这些公式和函数时,需要遵循正确的语法和参数要求,以确保计算结果的准确性。
(完整word版)多种最小二乘算法分析+算法特点总结

第一部分:程序设计思路、辨识结果分析和算法特点总结 (3)一:RLS遗忘因子法 (3)RLS遗忘因子法仿真思路和辨识结果 (3)遗忘因子法的特点: (4)二:RFF遗忘因子递推算法 (4)仿真思路和辨识结果 (4)遗忘因子递推算法的特点: (6)三:RFM限定记忆法 (6)仿真思路和辨识结果 (6)RFM限定记忆法的特点: (7)四:RCLS偏差补偿最小二乘法 (7)仿真思路和辨识结果 (7)RCLS偏差补偿最小二乘递推算法的特点: (9)五:增广最小二乘法 (9)仿真思路和辨识结果 (9)RELS增广最小二乘递推算法的特点: (11)六:RGLS广义最小二乘法 (11)仿真思路和辨识结果 (11)RGLS广义最小二乘法的特点: (13)七:RIV辅助变量法 (14)仿真思路和辨识结果 (14)RIV辅助变量法的特点: (15)八:Cor-ls相关最小二乘法(二步法) (15)仿真思路和辨识结果 (15)Cor—ls相关最小二乘法(二步法)特点: (17)九:MLS多级最小二乘法 (17)仿真思路和辨识结果 (17)MLS多级最小二乘法的特点: (21)十:yule_walker辨识算法 (21)仿真思路和辨识结果 (21)yule_walker辨识算法的特点: (22)第二部分:matlab程序 (23)一:RLS遗忘因子算法程序 (23)二:RFF遗忘因子递推算法 (24)三:RFM限定记忆法 (26)四:RCLS偏差补偿最小二乘递推算法 (29)五:RELS增广最小二乘的递推算法 (31)六;RGLS 广义最小二乘的递推算法 (33)七:Tally辅助变量最小二乘的递推算法 (37)八:Cor-ls相关最小二乘法(二步法) (39)九:MLS多级最小二乘法 (42)十yule_walker辨识算法 (46)第一部分:程序设计思路、辨识结果分析和算法特点总结一:RLS遗忘因子法RLS遗忘因子法仿真思路和辨识结果仿真对象如下:其中, v(k )为服从N(0,1)分布的白噪声。
计量检定员换证考试平直度题库(1-3)
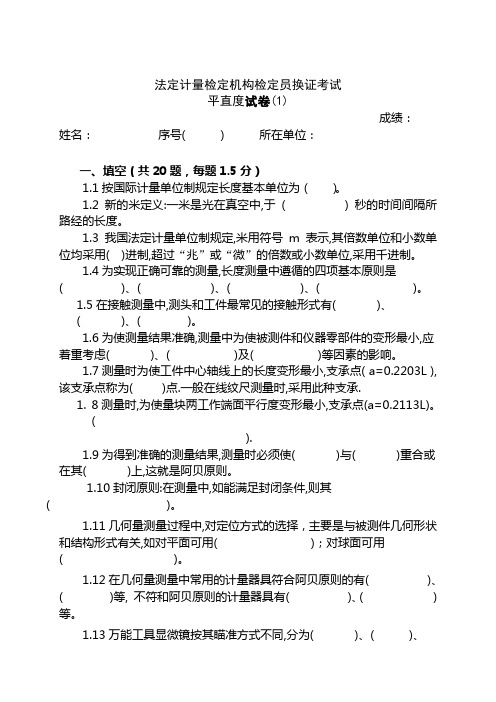
法定计量检定机构检定员换证考试平直度试卷(1)成绩:姓名:序号( ) 所在单位:一、填空(共20题,每题1.5分)1.1按国际计量单位制规定长度基本单位为()。
1.2新的米定义:一米是光在真空中,于 ( ) 秒的时间间隔所路经的长度。
1.3我国法定计量单位制规定,米用符号 m 表示,其倍数单位和小数单位均采用( )进制,超过“兆”或“微”的倍数或小数单位,采用千进制。
1.4为实现正确可靠的测量,长度测量中遵循的四项基本原则是( )、( )、( )、( )。
1.5在接触测量中,测头和工件最常见的接触形式有( )、( )、( )。
1.6为使测量结果准确,测量中为使被测件和仪器零部件的变形最小,应着重考虑( )、( )及( )等因素的影响。
1.7测量时为使工件中心轴线上的长度变形最小,支承点( a=0.2203L ),该支承点称为( )点.一般在线纹尺测量时,采用此种支承.1.8测量时,为使量块两工作端面平行度变形最小,支承点(a=0.2113L)。
().1.9为得到准确的测量结果,测量时必须使( )与( )重合或在其( )上,这就是阿贝原则。
1.10封闭原则:在测量中,如能满足封闭条件,则其( )。
1.11几何量测量过程中,对定位方式的选择,主要是与被测件几何形状和结构形式有关,如对平面可用( );对球面可用( )。
1.12在几何量测量中常用的计量器具符合阿贝原则的有( )、( )等, 不符和阿贝原则的计量器具有( )、( )等。
1.13万能工具显微镜按其瞄准方式不同,分为( )、( )、( )、( )。
1.14平晶在检定前放置在温度为(20±5)‴的检定室内,按规定100mm的平晶不少于( )小时;150mm平晶不少于( )小时。
1.15在检定平晶的平面度前,放置在检定仪器内的等温时间,对100mm 的平晶不少于( )分钟;150mm平晶不( )120分钟。
1.16平行平晶工作面中心长度极限偏差不超过( ),两工作面的平面度不大于( )μm。
最小二乘法
第七章 最小二乘法最小二乘法是实验数据处理的一种基本方法。
它给出了数据处理的一条准则,即在最小二乘以一下获得的最佳结果(或最可信赖值)应使残差平方和最小。
基于这一准则所建立的一整套的理论和方法,为随机数据的处理提供了行之有效的手段,成为实验数据处理中应用十分广泛的基础内容之一。
自1805年勒让得(Legendre )提出最小二乘法以来,这一方法得到了迅速发展,并不断完善,成为回归分析、数理统计等方面的理论基础之一,广泛地应用于天文测量,大地测量及其他科学实验的数据处理中。
现代,矩阵理论的发展及电子计算机的广泛应用,为这一方法提供了新的理论工具和得力的数据处理手段。
随着计量技术及其他现代科学技术的迅速发展,最小二乘法在各学科领域将获得更为广泛的应用。
本章仅涉及独立的测量数据的最小二乘法处理。
以等精度线性参数的最小二乘法为中心,叙述最小二乘法原理,正规方程和正规方程的解,以及最小二乘估计的精度估计。
最后给出测量数据最小二乘法处理的几个例子。
7 .1 最小二乘法原理县考察下面的例子。
设有一金属尺,在温度()C t ︒条件下的长度可表示)1(0t y y t α+=式中 y 0——温度为0°C 时的金属尺的长度;α——金属材料的线膨胀系数; t ——测量尺长时的温度。
现要求给出y 0与α的数值。
为此,可在t 1与t 2两个温度条件下分别测得尺的长度l 1与l 2,得方程组()()⎭⎬⎫+=+=20210111t y l t y l αα由此可解得y 0与α。
事实上,由于测量结果l 1与l 2含有测量误差,所得到的y 0与α的值也含有误差。
显而易见,为减小所得y 0与α值的误差,应增加y t 的测量次数,以便利用抵偿性减小测量误差的影响。
设在n t t t ,,,21 温度条件下分别测得金属尺的长度n l l l ,,,21 共n 个结果,可列出方程组⎪⎪⎭⎪⎪⎬⎫+=+=+=)1()1()1(0202101n n t y l t y l t y l ααα)1(0t y y t α+=但由于方程式的数目n 多于待求量的数目,所以无法直接利用代数法求解上述方程组。
LSL最小二乘格型算-刘智
z = π(n),U = X1,M (n),υ = x(n), y = z M1 x(n)
前向预测误差更新:
b b f eM (n 1) < z 1eM+1 (n), eM (n) > f f eM+1 (n) =< π (n), P⊥M+1 (n)x(n) >= eM (n) 1, b ξM (n 1)
递推算法过程
递推算法过程:
通过对x(n)的平移,其基向量全部是被延时的向量,现 的平移,其基向量全部是被延时的向量, 通过对 的平移 时向量不在其中, 阶前向预测滤波器就是根据 时向量不在其中,M阶前向预测滤波器就是根据 X1,M (n) ∧ 个基向量来计算现时数据向量x(n)的估计 x(n) 的M个基向量来计算现时数据向量 个基向量来计算现时数据向量 的估计
递推算法过程
当用 P1,M (n) 表示输入数据矩阵张成的空间 {X1,M } 的投影矩阵时则由投影定理 由投影定理3.4.44 的投影矩阵时则由投影定理 则n时刻前向预测误差向量 时刻前向预测误差向量 (正交投影矩阵 正交投影矩阵) 正交投影矩阵 前向预测误差
π (n) 为求得现时刻的标量
,其中 所引入的单位现时 引入的
之所以组成矩阵,是因为每个输入量都采用 个权的滤 之所以组成矩阵,是因为每个输入量都采用M个权的滤 波器。其最小二乘估计为: 波器。其最小二乘估计为:
回顾: 回顾:很多自适应方法使用基于梯度的方法寻找可以达到 最小均方误差的权矢量。 最小均方误差的权矢量。 均方误差性能曲面的梯度定义为: 均方误差性能曲面的梯度定义为: T ξ (n) ξ (n) ξ (n) ξ (n) (n) = = w(n) w0 (n) w1 (n) wL (n)
第5章最小二乘法
24
线性参数正规方程的矩阵形式
又因
(5-21)
有 即 若令 则正规方程又可写成 若矩阵C是满秩的,则有
(5-22)
(5-22) (5-23)
Xˆ 的数学期望
因 可见 Xˆ 是X的无偏估计。
式中Y、X为列向量(n ×1阶矩阵和t×l阶矩阵)
其中矩阵元素Y1,Y2,…,Yn为直接量的真值,而 Xl,X2,…,Xn为待求量的真值。
41
n
前面已证明
2 i
/
2
是自由度为(n-t)的χ2变量。
i 1
根据χ2变量的性质,有
(5-39) 取
(5-40) 可以证明它是σ2的无偏估计量
因为
42
习惯上,式5-40的这个估计量也写成σ2,即 (5-41)
因而测量数据的标准差的估计量为 (5-43)
43
例5.3
• 试求例5.1中铜棒长度的测量精度。 已知残余误差方程为 将ti,li,值代人上式,可得残余误差为
34
(2)用表格计算给出正规方程常数项和系数
(3)给出正规方程 (4)求解正规方程组
解得最小二乘法处理结果为
35
四、最小二乘原理与算术平均值原理 的关系
为了确定一个量X的估计量x,对它进 行n次直接测量,得到n个数据
l1,l2,…,ln,相应的权分别为p1, p2,…,pn,则测量的误差方程为
(5-35)
共得k个方程,称正规方程,求此联立方程的解可得 出诸参数估计值 aˆ j (j=1,2,…,k)。
10
最小二乘法的几何意义
从几何图形上可看出,最小二乘法就是要在穿过各 观测点(xi,yi)之间找出这样一条估计曲线,使各观测 点到该曲线的距离的平方和为最小。
最小二乘法应用举例
补充材料1 实验数据的处理(上接教材第二章,p.19)注意:(1)用最小二乘法计算斜率k 和截距b 时,不宜用有效数字的运算法则计算中间过程,否则会有较大的计算误差引入。
提倡用计算器计算,将所显示的数值均记录下来为佳。
(2)如果y 和x 的相关性好,可以粗略考虑b 的有效位数的最后一位与y 的有效数字最后一位对齐,k 的有效数字与y n -y 1和x n -x 1中有效位数较少的相同。
(3)确定有效位数的可靠方法是计算k 和b 的不确定度。
直线拟合的不确定度估算:(以b kx y +=为例) 斜率k 和截距b 是间接测量物理量,分别令测量数据的A 类和B 类不确定度分量中的一个分量为零,而求得另一个分量比较简单,最后将两个分量按直接测量的合成方法求出合成不确定度,这种方法被称为等效法。
可以证明,在假设只有y i 存在明显随机误差的条件下(且y 的仪器不确定度远小于其A 类不确定度),k 和b 的不确定度分别为:∑∑-=nx xS S i iyk 22)(∑∑∑∑-==2222)(iiiyikb x x n xS nxS S式中,S y 是测量值y i 的标准偏差,即2)(222---=-=∑∑n b kx yn S i iiy ν根据上述公式即可算出各个系数(斜率k 和截距b )的不确定度值,初看上去计算似乎很麻烦,但是利用所列的数据表格,由表中求出的那些累加值∑即可很容易算得。
最小二乘法应用举例应用最小二乘法处理物理量的测量数据是相当繁琐的工作,容易出现差错。
因此,工作时要十分细心和谨惯。
为便于核对,常将各数据及计算结果首先表格化。
例:已知某铜棒的电阻与温度关系为:t R R t ⋅+=α0。
实验测得7组数据(见表1)如下:试用最小二乘法求出参量R 0、α 以及确定它们的误差。
表 1此例中只有两个待定的参量R 0和α,为得到它们的最佳系数,所需要的数据有n 、ix 、iy、∑2ix、∑2iy和∑iiyx 六个累加数,为此在没有常用的科学型计算器时,通过列表计算的方式来进行,这对提高计算速度将会有极大的帮助(参见表2),并使工作有条理与不易出错。