微弱信号检测装置(国科大电子电路大作业)要点
浅析微弱信号检测装置设计
浅析微弱信号检测装置设计微弱信号检测装置是一种用于检测和测量微弱信号的仪器,广泛应用于科学研究和工程实践中。
本文将从设计原理、关键技术和应用场景三个方面对微弱信号检测装置进行浅析。
微弱信号检测装置的设计原理主要基于信号增强和噪声抑制两个方面。
对于微弱信号的增强,常用的方法包括放大、滤波和频谱分析等。
放大是通过放大器对信号进行增益放大,使信号的幅度变大,从而便于测量和分析。
滤波是通过滤波器对信号进行频率筛选,去除不需要的频率成分,提高信号的纯度和可测量性。
频谱分析是通过对信号进行频谱分解,将信号在频域上进行分析,找出信号中的频率成分和能量分布。
对于噪声的抑制,常用的方法包括降噪算法和滤波器设计等。
降噪算法通过对信号进行数字信号处理,去除噪声成分,提高信号与噪声之间的信噪比。
滤波器设计则是通过设计合适的滤波器,将噪声成分在一定频率范围内进行抑制。
微弱信号检测装置的关键技术主要包括低噪声设计、高精度采样和高精度测量。
低噪声设计是为了降低仪器自身的噪声水平,提高信号与噪声之间的信噪比。
其中包括采用低噪声器件和电路设计、提高系统的灵敏度和动态范围等。
高精度采样是为了保证对微弱信号的准确采样和测量。
其中包括提高采样器的采样率、增加采样深度和增加采样通道数等。
高精度测量是为了保证对微弱信号的准确测量和分析。
其中包括提高测量设备的精度、减小系统误差和提高数据处理算法的准确性等。
微弱信号检测装置的应用场景非常广泛,包括物理实验、天文观测、生物医学和无线通信等领域。
在物理实验中,微弱信号检测装置可以用于检测物质的微弱轰击、光子信号和微小振动等。
在天文观测中,微弱信号检测装置可以用于检测星际信号、宇宙背景辐射和射电天文信号等。
在生物医学中,微弱信号检测装置可以用于检测心电信号、脑电信号和生物分子信号等。
在无线通信中,微弱信号检测装置可以用于检测低功率信号、弱信号接收和频谱监测等。
微弱信号检测装置是一种重要的仪器设备,具有广泛的应用前景。
浅析微弱信号检测装置设计
浅析微弱信号检测装置设计微弱信号检测在许多领域都有着重要的应用,比如无线通信、生物医学、天文测量等。
设计一种高效的微弱信号检测装置对于提高信号检测的灵敏度和准确性至关重要。
本文将从硬件设计和信号处理两个方面对微弱信号检测装置进行浅析。
一、硬件设计1. 低噪声放大器在微弱信号检测装置中,低噪声放大器是至关重要的组件。
由于微弱信号本身具有较低的能量,因此在信号放大的过程中,放大器的噪声也会对信号检测产生较大的影响。
低噪声放大器可以有效地抑制噪声,并且提高信噪比,从而更好地检测微弱信号。
在设计低噪声放大器时,需要考虑放大器的增益、带宽、输入输出阻抗等参数,同时在电路设计上采用低噪声元件和优化的布局方式,以尽量减小放大器本身的噪声。
2. 滤波器在微弱信号检测中,滤波器起着至关重要的作用。
由于环境中可能存在各种干扰信号,比如电磁干扰、交流干扰等,因此需要采用滤波器来剔除这些干扰信号,保留下需要检测的微弱信号。
常见的滤波器包括低通滤波器、带通滤波器等,通过合理设计滤波器的参数和特性,可以有效地滤除不需要的频率成分,提高信号的纯净度。
3. 高精度模拟数字转换器(ADC)在微弱信号检测装置中,通常需要将模拟信号转换为数字信号进行后续处理。
高精度的模拟数字转换器是必不可少的组件。
高精度ADC可以有效地保持信号的原始信息,并且提高信号的采样精度和分辨率,从而更好地还原微弱信号的细节和特征。
4. 高灵敏度探测器高灵敏度的探测器对于微弱信号的检测非常重要。
在无线通信中,微弱的无线信号可能需要通过天线进行接收,因此天线的灵敏度直接影响信号的接收效果。
在生物医学领域,微弱的生物信号需要通过生物传感器进行检测,因此生物传感器的灵敏度非常重要。
在设计高灵敏度探测器时,需综合考虑探测器的灵敏度、稳定性和信噪比,以达到最佳的检测效果。
二、信号处理在微弱信号检测中,由于信号本身较弱,可能会受到一些非理想因素的影响,比如噪声、干扰等。
微弱信号检测装置(实验报告)
微弱信号检测装置摘要:本设计是在强噪声背景下已知频率的微弱正弦波信号的幅度值,采用TI公司提供的LaunchPad MSP430G2553作为系统的数据采集芯片,实现微弱信号的检测并显示正弦信号的幅度值的功能。
电路分为加法器、纯电阻分压网络、微弱信号检测电路、以及数码管显示电路组成。
当所要检测到的微弱信号在强噪音环境下,系统同时接收到函数信号发生器产生的正弦信号模拟微弱信号和PC机音频播放器模拟的强噪声,送到音频放大器INA2134,让两个信号相加。
再通过由电位器与固定电阻构成的纯电阻分压网络使其衰减系数可调(100倍以上),将衰减后的微弱信号通过微弱信号检测电路,检测电路能实现高输入阻抗、放大、带通滤波以及小信号峰值检测,检测到的电压峰值模拟信号送到MSP430G2553内部的10位AD 转换处理后在数码管上显示出来。
本设计的优点在于超低功耗关键词:微弱信号MSP430G2553 INA2134一系统方案设计、比较与论证根据本设计的要求,要完成微弱正弦信号的检测并显示幅度值,输入阻抗达到1MΩ以上,通频带在500Hz~2KHz。
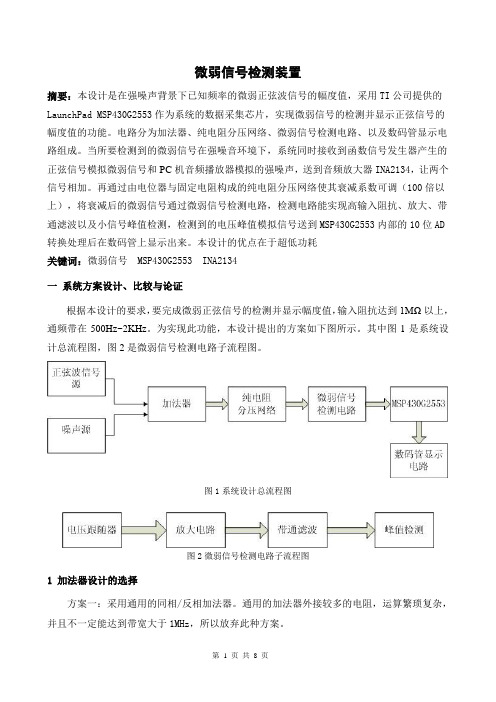
为实现此功能,本设计提出的方案如下图所示。
其中图1是系统设计总流程图,图2是微弱信号检测电路子流程图。
图1系统设计总流程图图2微弱信号检测电路子流程图1 加法器设计的选择方案一:采用通用的同相/反相加法器。
通用的加法器外接较多的电阻,运算繁琐复杂,并且不一定能达到带宽大于1MHz,所以放弃此种方案。
方案二:采用TI公司的提供的INA2134音频放大器。
音频放大器内部集成有电阻,可以直接利用,非常方便,并且带宽能够达到本设计要求,因此采用此方案。
2 纯电阻分压网络的方案论证方案一:由两个固定阻值的电阻按100:1的比例实现分压,通过仿真效果非常好,理论上可以实现,但是用于实际电路中不能达到预想的衰减系数。
分析:电阻的标称值与实际值有一定的误差,因此考虑其他的方案。
方案二:由一个电位器和一个固定的电阻组成的分压网络,通过改变电位器的阻值就可以改变其衰减系数。
微弱信号检测装置要点

微弱信号检测装置摘要:本设计以TI的Launch Pad为核心板,采用锁相放大技术设计并制作了一套微弱信号检测装置,用以检测在强噪声背景下已知频率微弱正弦波信号的幅度值,并在液晶屏上数字显示出所测信号相应的幅度值。
实验结果显示其抗干扰能力强,测量精度高。
关键词:强噪声;微弱信号;锁相放大;Launch PadAbstract:This design is based on the Launch Pad of TI core board, using a lock-in amplifier technique designed and produced a weak signal detection device, to measure the known frequency sine wave signal amplitude values of the weak in the high noise background, and shows the measured signal amplitude of the corresponding value in the liquid crystal screen. Test results showed that it has high accuracy and strong anti-jamming capability.Keywords: weak signal detection; lock-in-amplifier; Launch Pad1、引言随着现代科学技术的发展,在科研与生产过程中人们越来越需要从复杂高强度的噪声中检测出有用的微弱信号,因此对微弱信号的检测成为当前科研的热点。
微弱信号并不意味着信号幅度小,而是指被噪声淹没的信号,“微弱”也仅是相对于噪声而言的。
只有在有效抑制噪声的条件下有选择的放大微弱信号的幅度,才能提取出有用信号。
物理实验技术中微弱信号检测器的使用技巧探究

物理实验技术中微弱信号检测器的使用技巧探究物理实验技术中微弱信号的检测是一项关键的技术,它在各个领域中都扮演着重要角色。
本文将探究物理实验技术中微弱信号检测器的使用技巧。
微弱信号的检测在物理实验中具有重要意义,它对于测量微小变化、探索微观世界以及提高信号传输的灵敏度至关重要。
然而,由于微弱信号常常受到环境噪声的干扰,因此必须采取一系列技术手段来减小干扰,提高检测的精度和灵敏度。
首先,对于微弱信号的检测器选择至关重要。
在选择检测器时,需考虑信号的特性、频率范围以及实验的具体需求。
常见的微弱信号检测器包括放大器、锁相放大器、光电二极管等。
针对不同的实验需求,选用适合的检测器能够提高信号的检测效果。
其次,信号的传输过程中应注意信号的衰减问题。
在传输过程中,信号可能会受到线路、连接器和缆线等因素的影响而衰减。
因此,选用低衰减率的材料和优质的线缆可以在一定程度上减小信号衰减,提高信号的保真度和强度。
此外,消除信号干扰是提高信号检测精度的关键一环。
干扰源可以是来自环境的噪声,也可以是实验装置内部的干扰。
为了减小来自环境的噪声干扰,可以选择在低噪声环境中进行实验,并使用隔音材料阻隔外部声音。
至于内部干扰,应确保实验装置的接地良好,并合理安排线路布局,避免信号交叉干扰。
另外,提高信号的信噪比也是一项重要任务。
信噪比是指信号与噪声强度的比值,它直接关系到信号的可靠性和精确度。
提高信噪比可以通过增强信号的强度,减小噪声的干扰等手段来实现。
例如,在实验中可以采用冷却技术降低噪声的产生,使用低噪声放大器放大信号。
此外,数据处理和分析也是微弱信号检测的重要环节。
在数据处理中,应使用合适的滤波器对信号进行滤波,以去除不必要的噪声。
数据分析阶段可以使用谱分析仪、频谱图等工具对信号进行进一步分析和挖掘。
最后,进行实验时还应注意实验的稳定性和可重复性。
稳定性是指实验结果的一致性,可重复性是指实验结果的再现性。
为了提高实验的稳定性和可重复性,需要注意一些实验细节,如温度控制、实验仪器的校准、隔离震动等。
浅析微弱信号检测装置设计
浅析微弱信号检测装置设计微弱信号检测是指在非常低的信噪比下,对微弱信号进行可靠检测和测量。
在现实生活和工程应用中,微弱信号检测是非常重要的,常见的应用场景包括地震监测、生物医学检测、通信系统等。
设计一种高效可靠的微弱信号检测装置对于这些应用至关重要。
在微弱信号检测装置设计中,需要克服信号太小、噪声干扰大等问题,因此需要一系列工程手段和技术手段来实现微弱信号的准确检测。
接下来,我们将从信号处理、噪声抑制、灵敏度提高等方面对微弱信号检测装置进行浅析。
信号处理是微弱信号检测中的关键环节。
一般情况下,微弱信号在传感器中采集后需要进行放大、滤波等处理,以提高信噪比。
对于微弱信号的有效检测,通常需要将其转换为数字信号进行处理。
信号处理技术在微弱信号检测中起着至关重要的作用。
在实际设计中可以采用数字滤波、数字增益控制、数字匹配滤波等方法,对微弱信号进行有效处理从而获得清晰的信号特征。
噪声抑制是微弱信号检测中的另一个关键问题。
由于噪声的存在,微弱信号的检测变得更加困难。
需要对噪声进行有效的抑制。
在设计过程中可以采用模拟滤波器、数字滤波器等方法,对噪声进行抑制从而提高信噪比。
还可以采用信号平均、时域滤波等技术手段来进一步抑制噪声,从而提高微弱信号的检测精度和可靠性。
随后,灵敏度提高是微弱信号检测中的重要问题。
在实际应用中,由于信号本身很微弱,仪器的灵敏度往往成为制约检测性能的关键因素。
设计具有高灵敏度的检测装置对于微弱信号检测至关重要。
在装置的设计中,可以通过优化传感器结构、提高电路灵敏度、减小噪声等方式来提高检测系统的灵敏度。
还可以采用增益控制、信号平均等技术手段来提高装置的灵敏度,从而更好地检测微弱信号。
仪器的稳定性和可靠性也是微弱信号检测中需要考虑的重要因素。
在设计检测装置时,需要考虑到降低系统的漂移,提高仪器的稳定性。
还需要考虑到装置的可靠性,避免各种外界因素对仪器性能的影响,确保检测装置的可靠运行。
微弱信号检测装置的设计需要充分考虑信号处理、噪声抑制、灵敏度提高和稳定性可靠性等因素。
浅析微弱信号检测装置设计
浅析微弱信号检测装置设计在科学研究与工业生产中,微弱信号的检测对于数据采集、物理实验、医学诊断等方面具有至关重要的意义。
由于微弱信号的本质是低电平、低噪声、低幅度的电信号,因此其检测对于检测设备本身的精度和灵敏度都提出了苛刻的要求,需要从设计电路、材料选择、信号处理等多个方面进行精心设计。
一般来说,微弱信号检测可以分为三个阶段:信号采集、信号放大与滤波以及信号处理与分析。
在信号采集阶段,需要选择合适的传感器或探头,建立信号采集电路,并设计合适的连接线路,以确保信号能够被准确有效地采集到。
在信号放大与滤波阶段,需要使用低噪声放大器和高精度滤波器等设备,将微弱信号放大和滤波,以提高信噪比,减少杂音干扰。
在信号处理与分析阶段,需要使用数字信号处理芯片和算法,对信号进行二次处理和分析,以提取有效信息。
在设计微弱信号检测装置时,还需要注意以下几点:第一,选择合适的传感器或探头。
传感器是将被测物理量转化为电信号的设备,如温度传感器、压力传感器、光电传感器等。
在选择传感器时,需要根据被测物理量的性质及其量级范围,选用合适的传感器。
第二,设计合适的连接线路。
连接线路应该具有良好的电学特性,以确保信号准确地传输和采集。
并且需要根据不同传输距离和环境干扰情况,选用合适的阻抗、屏蔽等措施,保证信号传输的质量。
第三,选择合适的放大器和滤波器。
放大器需要具有低噪声、高精度、宽带、低失真等特点,以确保微弱信号得以有效放大。
同时,滤波器需要根据被测信号的频率范围,选用相应的滤波器,以去除杂音和干扰。
第四,设计合适的信号处理和分析算法。
信号处理和分析算法是对被测信号进行二次处理和分析的重要手段。
这些算法需要具有高效、精确、实时等特点,以提取出有效信息。
最后,微弱信号检测装置还需要进行严格的性能测试和校准,以确保其具有良好的准确度和稳定性。
同时,为了防止干扰和误差,还需要采用屏蔽、隔离、抗干扰等措施,以保证检测装置的正常工作。
微弱信号检测装置
分压模块要求纯电阻分压网络的衰减系数不低于100,电路采用1k与120k电阻进行串联进行分压
模块原理图:
(三)微弱信号检测方案:
首先采用滤波电路对经过加法器出来的信号进行滤波,由于加法器把噪音与正弦信号相加在滤波电路要把正弦信号检出来,然后对正弦信号进行放大,使其幅度可以达到当输入正弦波信号VS的频率为1kHz、幅度峰峰值在200mV~ 2V范围内时,检测并显示正弦波信号的幅度值,要求误差不超过5%的要求,在对信号进行放大以后信号进入峰值检测电路,对电路进行幅度检测,然后由MSP430进行采样经过AD模块把最后的幅度值显示出来。
N Y
二.方案论证
(一)加法器模块方案:
用TI公司提供的OPA2134PA实现加法器模块,对提供的两个信号由信号发生器产生的正弦波和以给定的标准噪声进行相加,OPA2134pa是高性能专业双音频放大器,具有超低失真,低噪音等特点,其带宽为8MH,满足题目带宽大于1MHz的要求。
加法器模块原理图:
电路理论原理如下:
不加噪音时效果如下:
滤波电路如图所示
(四)AD误差测量及结果
向MCU输入可变直流电源,1602液晶模块显示出当前电压幅度值如下表
次数
输入电压(V)
显示幅度(V)
1
2.5
2.395
2
2.2
2.107
3
2.0
1.916
4
1.8
1.732
5
1.6
1.584
6
1.4
1.374
7
1.2
1.129
8
1.0
1.013
微弱信号检测装置设计报告
微弱信号检测装置(A题)
微弱信号检测装置
微弱信号检测装置(A题)宜宾学院税聪周孝辉彭启财摘要:本作品围绕锁相环CD4046和乘法器AD835为主体,经过加法器、纯电阻衰减网络以及微信号检测前级的放大,其中加法器用高性能的INA2134,微信号检测前级的放大采用TI 公司高输入阻抗的OPA2228。
配合滤波器、直流放大器。
最终把已经被噪声淹没的微信号提取出来。
最后经过AD1115采样,通过单片机控制最终实现微信号峰峰值的显示,其中单片机选用TI公司的单片机最小系统板—LAUNCHPAD G2533。
关键字:微信号、锁相环、AD835、滤波器摘要 ...............................................Error! Bookmark not defined.一、方案比较与论证 (41)1.增益控制部分 (41)2.后级放大电路 (41)二、理论分析与参数计算 (42)1.带宽增益积 (42)2.通频带内增益起伏控制 (42)3.线性相位 (42)4.抑制直流零点漂移 (42)5.放大器稳定性 (42)三、系统各模块电路的设计 (43)1.输入缓冲和增益控制部分 (43)2.后级驱动电路 (43)4.低通滤波部分 (44)5.控制部分 (44)四、软件设计 (44)五、测试方案与测试结果 (45)1.测试工具 (45)2.测试方法与数据 (45)(1)输入阻抗测试 (45)(2)幅频特性测试 (45)(3)最大有效值输出 (45)(4)输出噪声测试 (46)(5)增益步进测试 (46)(7)功能测试 (46)(8)误差分析 (46)六、总体结论 (47)七、附录 (47)1.失调电压调节电路 (47)2.程控放大电路 (47)3.控制部分框图..................................Error! Bookmark not defined.4.软件流程图....................................Error! Bookmark not defined.一、方案比较与论证经过仔细的论证和分析,我们确定本次设计的模块有信号的相加、滤波器、纯电阻衰减网络、微信号的检测、有效值的获得。
浅析微弱信号检测装置设计
浅析微弱信号检测装置设计
微弱信号检测装置是指在环境噪声干扰下,检测并提取出微弱信号的设备。
微弱信号的检测在很多领域都有应用,比如医学诊断、环境监测、地震预警等。
本文将从信号源、传感器、信号处理以及噪声抑制等方面对微弱信号检测装置的设计进行浅析。
一、信号源
微弱信号的来源非常广泛,可以是生物体内的脉冲信号、地面的微震信号、气体的微弱放电信号等。
因此,在设计微弱信号检测装置时,需要根据实际的信号源选取相应的传感器和信号采集器。
二、传感器
选择合适的传感器是微弱信号检测装置设计的第一步。
传感器的灵敏度和频率响应是影响检测精度的重要因素。
为了检测微弱信号,需要使用灵敏度较高的传感器,比如震动传感器、压电传感器等。
此外,传感器的电路设计也非常重要,要尽可能降低传感器自身噪声的影响,保障信号的良好转换。
三、信号处理
对于采集到的微弱信号,需要进行一系列的信号处理,以提高信噪比,减小误差。
首先,采用差分放大器,可以排除掉传感器、前级电路产生的共模噪声。
另外,在信号放大之前,要进行低通滤波。
此外,锁相放大器也是常用的信号处理方法,它可以消除高频噪声和低频漂移,提高信号的稳定性和准确性。
四、噪声抑制
环境噪声对微弱信号的检测非常不利,因此,在微弱信号检测装置设计过程中,噪声抑制也是非常重要的一步。
首先,要选择合适的工作环境,尽量远离噪声源。
其次,在电路设计时,要采取一系列噪声抑制措施,比如加装屏蔽罩、使用低噪声元器件等,以降低噪声引入的影响。
最后,信号采集的时间也非常重要,要尽可能避开环境噪声较高的时间段。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录摘要 (1)Abstract (1)第一章绪论 (2)1.1 微弱信号检测技术概述 (2)1.2 信号检测的方法及微弱信号的特点 (2)1.2.1 常规小信号的检测方法 (2)1.2.2 微弱信号的检测方法 (4)1.2.3 微弱信号的特点 (4)1.3 本文的主要工作 (5)第二章微弱信号检测装置设计方案选择与论证 (6)2.1 方案选择与论证 (6)2.1.1 系统方案的确定 (6)2.1.2移相网络设计 (9)2.2总体方案论述 (9)第三章基于锁相放大的微弱信号检测装置设计 (10)3.1 锁相放大器原理 (10)3.2 移相网络 (10)3.3 相敏检波器原理分析 (11)3.4 电路设计 (12)3.4.1加法器 (12)3.4.2纯电阻分压网络 (12)3.4.3前级放大电路模块 (13)3.4.4带通滤波器 (13)3.4.5相敏检波器 (13)第四章仿真分析与程序设计 (16)4.1 仿真分析 (16)4.1.1 输入信号波形(前置两级放大电路输入波形) (16)4.1.2 经过前置放大电路和带通滤波器后输出波形 (16)4.1.3 参考信号输入输出波形 (17)4.1.4 LM311过零比较器输出波形 (18)4.1.5 开关乘法器输出波形 (18)4.1.6 低通滤波输出波形 (19)4.2 程序设计 (20)第五章实物展示与测试方案及结果 (21)5.1 实物展示 (21)5.2 测试方案与测试结果 (21)5.2.1 测试仪器 (21)5.2.2 测试方案 (21)5.3测试结果及分析 (23)5.4 总结 (23)微弱信号检测装置摘要本系统是基于锁相放大器的微弱信号检测装置,用来检测在强噪声背景下已知频率的微弱正弦波信号的幅度值。
该系统由加法器、纯电阻分压网络、微弱信号检测电路和显示电路组成。
其中加法器和纯电阻分压网络生成微小信号,微弱信号检测电路和显示电路完成微小信号的检测和显示在液晶屏上。
本系统是以相敏检波器为核心,将参考信号经过移相器后,接着通过比较器产生方波去驱动开关乘法器CD4053,最后通过低通滤波器输出直流信号检测出微弱信号,将该直流信号送入单片机处理后,液晶显示出来。
经最终的测试,本系统能较好地完成微小信号的检测。
关键词:微弱信号强噪声相敏检测AbstractThe system of weak signal detection is based on lock-in amplifier device,used for the detection of known weak sinusoidal signal under strong noise background frequency . The system consists of an adder, pure resistor divider network, weak signal detection circuit and display circuit. The adder and the pure resistor divider network to produce small signal, weak sig nal detection circuit and display circuit to complete the detection of tiny signal and displayed on the LCD screen. The system is based on a phase sensitive detector as the core,the reference signal through the phase shifter, then through the comparator produces square wave to drive swtich multiplier CD4053, finally through the low pass filter output DC signal detection of weak signal ,the DC signal was transmitted into the mircrocontroller processing , then the liquid crystal displayed. The system achieves the tiny signal successfully.Key Word:weak signal strong noise phase sensitive detection第一章绪论1.1 微弱信号检测技术概述在自然现象和规律的科学研究和工程实践中荧光光强;卫星信号的接收;红外探测以及经常遇到需要检测毫微伏量级信号的问题,比如测定地震的波形和波速;材料分析时测量生物电信号测量等,这些问题都归结为噪声中的微弱信号的检测。
微弱信号检测技术是采用电子学,信息论,计算机和物理学的方法,分析噪声产生的原因和规律,研究被测信号的特点和相关性,检测被噪声淹没的微弱有用信号。
微弱信号检测的宗旨是研究如何从强噪声中提取有用的信号,任务是研究微弱信号的检测的理论。
在现代信息技术领域中,微弱信号检测是一项重要的内容,同时也是工程技术中人们获得各种有用信息的一项重要手段。
微弱信号的概念有两种含义:一种是有用信号的幅度相对于噪声显得很微弱;另一种是有用信号的幅值本身绝对值很小。
研究噪声中微弱信号检测的原理和方法,是信号处理技术中的综合技术和尖端领域。
运用这种技术可以检测到传统观念认为不可能检测的微弱量(如:弱光,小位移,微小振动,弱声,微电流等),大大提高了微弱信号的检测精度。
随着社会以及科技的发展,微弱信号检测在雷达、声纳技术、振动测量、故障诊断、通信、物理学、系统辨识等领域有着广泛的应用,在国内外也越来越受到重视。
随着科技的发展对微弱信号进行检测的需求日益迫切。
1.2 信号检测的方法及微弱信号的特点1.2.1 常规小信号的检测方法与微弱信号相比,小信号的信噪比要高的多,检测技术也更容易些。
从提高信噪比,从而检测出被噪声污染的有用信号的角度来看,小信号检测和微弱信号检测有一定的共同之处,以下是常规小信号的检测方法,对微弱信号检测具有一定的参考价值。
⑴滤波在大部分检测仪器中都需要对模拟信号进行滤波处理,有的滤波时为了隔离直流分量,有的滤波时为了改善信号波形,有的滤波是为了防止离散化的频率混叠,更多的滤波是为了克服噪声的不利影响,从而提高信噪比。
根据噪声和信号的不同特性,常用的抑制噪声的滤波器为低通滤波器(LPF)和带通滤波器(BPF),此外,有时为了抑制某一特定频率的干扰噪声的不利影响,有时带阻滤波器(即陷波器)。
⑵调制放大与解调对于缓变信号或者直流信号,若未经变换处理而直接用直流放大器进行放大,则传感器和前级放大器的1/f 噪声以及缓慢漂移(包括温度漂移和时间漂移)经过放大器后会以很大的幅度出现在后级放大器的输入端,当有用信号幅度很小时,可能根本检测不出来。
而简单的电容隔直方法能有效地抑制漂移和低频噪声,但是对有用信号的低频也具有衰减的作用。
在这种情况下,利用调制放大器能够有效的解决上述的问题。
这样的调制放大器大多采用幅度调制的方法。
⑶零位法图1 零位法检测信号原理图一般的直接指示测量仪表方法是将被测信号放大到一定的幅度,以驱动表头指针的偏转角度来指示被测量的大家;零位法是调整对比量的大小,使其尽量接近被测量量,由对比量指示出被测量的大小,如图1所示。
图中零位表指针只用来表示,被测量和对比量之间的差异值,当零位表指示近似为0时,对比量大小就表征了被测量的大小。
1.2.2 微弱信号的检测方法锁相放大器微弱信号检测常规的微弱信号检测方法根据信号本身的特点不同,一般有三条途径:一是降低传感器与放大器的固有噪声,尽量提高信噪比;二是研制适合微弱检测原理并能满足特殊需要的器件,如锁相放大器;三是利用微弱信号检测技术,通过各种手段提取信号,锁相放大器由于具有中心频率稳定,通频带窄,品质因数高等优点得到了广泛的应用。
常用的模拟锁相放大器,虽然速度快,但是参数稳定性和灵活性差;传统的数字锁相放大器一般使用高速的A/DC对信号进行高速采样,然后使用比较复杂的算法进行锁相运算,这对微处理的要求较高;现提出的新型锁相检测电路是模拟与数字方法的有机结合,这种电路将待测信号和参考信号相乘的结果,经过高精度的ADC采样,采样率不高,因此对于处理器的运算能力和速度要求不高,算法和电路更加简单。
1.2.3 微弱信号的特点⑴待检测信号的信噪比较低待测信号本身幅值比较低,同时在获取或转换、传输过程中又受到环境噪声以及获取、转换和传输设备本身的噪声干扰,所以待测信号的信噪比较低。
⑵实时性在通讯、雷达、医学成像等领域对微弱信号检测技术都有广泛的要求,而在这些场合应用对实时性的要求也比较高。
传统的WSD方法分为频域分析法和时域分析法。
除了前面提到的一系列测量方法外,还有取样积分法,时域平均法以及一些比较新的WSD方法,如差分振子法、高阶统计量、小波分析、随机共振、神经网络、独立分量分析法等等。
1.3 本文的主要工作第一章绪论,简要介绍了微弱信号检测技术的概念,小信号和微弱信号检测的几种方法以及微弱信号检测技术的特点。
第二章主要介绍了本文微弱信号检测装置的设计方案的选择以及总体的设计思想。
第三章主要介绍基于锁相放大的微弱信号检测装置设计。
本章从加法器单元电路的设计、纯电阻单元电路的设计、锁相放大器电路的设计这几个方面对微弱信号检测装置进行理论计算和分析。
第四章各部分仿真结果分析及软件设计。
第五章测试方案、实物展示与测试结果。
第二章微弱信号检测装置设计方案选择与论证2.1 方案选择与论证2.1.1 系统方案的确定设计微弱信号检测装置的核心在于微弱信号检测电路,因此重点考虑此部分方案的选择与论证。
方案一:带通滤波设计以目标频率为中心频率的带通滤波器,则该滤波器只允许与目标频率同频率的正弦信号通过。
优点:这种方法电路设计相对便捷,结果直观,能直接将目标信号从混合中提取出来。
缺点:①电路稳定性较难控制,滤波器很难达到极高的Q值。
②对元器件精度要求较高(如电阻、电容值)。
③滤波器中心频率一经确定,很难再依据信号的频率改变而改变,无法实现较宽频带范围内的正弦信号提取。
图2.1.1 窄带滤波系统框图如图2.1.1为窄带滤波系统框图。
窄带滤波利用了信号的功率谱密度较窄而噪声的功率谱相对很宽的特点,所以窄带滤波器的作用是滤掉宽带噪声,只让有用信号通过,将窄带信号提取出来。
由于窄带滤波器只让噪声功率的很小一部分通过而滤掉了大部分噪声功率,因此输出信噪比可以有很大改善。