齿轮传动蜗杆传动受力分析
第三节蜗杆传动的运动分析和受力分析

Ft1 Fx2
Fx1 Ft 2
z4
n4
Fx4
n3
Fx3
n2
z2
Ⅱ
n2
z3 Fx2 I
n1
Ft1 z1 n1
Fx1
右旋
Ft2
例题
Ⅲ
图示为蜗杆
传动和直齿圆锥
传动组合。已知
蜗杆的螺旋线方
向和转向。
在图中标出各轮转
动方向。
z2
z4 n4
n3 z3
n2
Ⅱ
I
n1 z1 n1
n2
v1
v2
v2
v1
蜗杆传动的受力分析
蜗轮的回转方向
A
蜗杆传动的受力分析
蜗轮的回转方向
C
蜗杆传动的受力分析
2、蜗杆传动的受力分析
蜗杆齿面的法向力Fn
Fn1
可以分解成三个互相垂
直的力Fr、Ft、Fx。
Fx1
Fr1
切向力
Ft1
2T1 d1
n
径向力
Fr1
Ft1
cos
tan n
轴向力
Fx1
Ft1
tan
Fr2
Fx1
Ft1
: 压力角 20
蜗杆传动的受力分析
例题
图示为蜗杆传动
z4
和直齿圆锥传动组 合。已知输出轴上 Ⅲ
n4
的锥齿轮z4的转向n4
。求:
z3
➢ 确定蜗杆的螺
I
旋线方向和转向,
并使中间轴II上的
轴向力能抵消一部
z2
Ⅱ
z1
分
➢ 在图中标出各
例题
确定蜗杆的 Ⅲ 螺旋线方向和 转向,并使中 间轴II上的轴 向力能抵消一 部分在。图中标出各
《机械设计》第12章 蜗杆传动
阿基米德蜗杆:αx=20°
标准值
法向直廓蜗杆、渐开线蜗杆:αn=20°
s
pz=zpx1 px1
2.蜗杆导程角γ和分度圆直径d1 螺纹
蜗杆
ψ πd1
tanψ =
s πd1
=
np πd1
∴ d1
=
Z1 tanγ
m
=
qm
γ πd1
tanγ
=
pZ πd1
=
πmZ πd1
1
=
mZ 1 d1
q
=
Z1 tanγ
具有良好的减摩性、耐磨性、跑合性和抗胶合能力
特点:软硬搭配
蜗杆硬:优质碳素钢、合金结构钢 经表面硬化及调制处理
蜗轮软:铸锡青铜、无锡青铜、灰铸铁
1、蜗杆材料
蜗杆一般采用碳素钢或合金钢制造。 对于高速重载的传动,蜗杆常用低碳合金钢, 如20Cr,20CrMnTi等,经渗碳淬火,表面硬度 HRC56~62,并应磨削。
MPa
= 12.86MPa < [σ F ]
齿根的弯曲疲劳强度校核合格。
(5)验算传动效率h
蜗杆分度圆速度为
v1
=
π d1n1
60×1000
=
3.14×112×1450 60×1000
m/
s
=
8.54m /
s
vs
= v1
cosλ
8.54
=
m / s = 8.59m / s
cos6.412°
查表4.9得
ρ v = 1°09′(1.15°)
h
(0.95
~
0.97)
tan tan( v)
H
480 d2
齿轮传动、蜗杆传动受力分析

Fn αn
Fr = F’ tgαn
长方体底面
β
F’
F'
β
F’ αn :法向压力角
β : 节圆螺旋角
F’=Ft /cosβ
三、直齿圆锥齿轮传动
两齿轮在节点啮合,忽略摩擦力,将沿齿宽分布的载 荷等效变换为集中作用在齿宽中点的法向力,通常将 法向力分解为相互垂直的三个分力:切向力、径向力、 轴向力。
主动齿轮受力计算公式:
2000 1 T Ft1 d m1 Fr1 Ft1 t an cos 1 Fa1 Ft1 t an sin 1 Fbn Ft1 cos
从动齿轮受力计算公式:
Ft2
2000 2 T d m2
Fr2 Ft2 t an cos 2 Fa2 Ft2 t an sin 2 Fbn Ft2 cos
齿轮传动、涡轮传动的受力分析
目录
一、直齿圆柱齿轮传动
二、斜齿圆柱齿轮传动 三、直齿圆锥齿轮传动 四、蜗杆传动
一、直齿圆柱齿轮传动
2T1 法向力: Fn d1 cos
圆周力:
Ft
r
2T1 d1
径向力: F
Ft tan
2013-4-29
二、斜齿圆柱齿轮传动
(1)圆周力Ft的方向在主动轮上与运 动方向相反,在从动轮上与运动方向 相同; (2)轴向力Fa的方向按主动轮的螺旋 线方向和转向,用左、右手螺旋定则 来确定。 (3)主动轮右旋,用右手;左旋,用 左手:四指弯曲方向表示主动轮的回 转方向,其拇指所指方向即为主动轮 上轴向力Fa1的方向;从动轮的轴向力
n1 n2
左、右手定则:四指n1、拇指反向:啮合点v2→n2
练习:
Fr1 Ft2 Fa2 ⊙ Ft1 Fa1 x Fr2
蜗杆蜗轮传动受力分析与效率计算

力矩 、转速 、振动 和噪声 的要求 。 1 驱 动器传 动示 意图及 工作原理
驱动 器传 动示 意 图如 图 1 示 , 电机 末端 装有蜗 所 杆 1 ,蜗轮 2和 小齿 轮 3成为 一 体 ,在 蜗 杆 l的带动
下 转动 ,齿 轮 3又带 动大 齿轮 4 ,最 后输 出轴 5输 出 转矩与转速 。
I c8 0y sr o s iy r) {. ooa i +cs)。 …“ F Fcs.n /o = ( sy . y t ………………・1 ()
【 s i n
其 中: 为蜗杆 啮合处所 受法 向力 ; 、 、 分别 为 法 向力 在 方 向上 的分力 ; 为法 向压力 角; 7为蜗 杆 导程 角 ; 为蜗杆 蜗轮 啮合 面 之 间 的摩擦 系 数。
第 4期 ( 第 1 7期 ) 总 6
21 0 1年 8月
机 械 工 程 与 自 动 化
M E CH A N I CA L EN G I E ER I G & N N A UTO M A T1 N 0
No. 4
Aug.
文 章 编 号 :6 2 6 1 2 1 )0 - 2 10 1 7— 4 3( 0 1 4 00 - 3
4 蜗杆蜗 轮啮合效 率计 算分析
m ; = l; 02 m; m r 4mi = . m 蜗轮 分 度 圆半 径 R= 56 4 b l 5 1. 9
mm ; 0.8; = 0 /B O.8: c O.8: =1 。; 9 = 0 O.8: = 0 / = 0 z z 0 y= 。; 后 0.4 k = 1 0 9。 2 2 7 ̄ r O.8
O1 6
0.6 5
/
/
图 4 蜗杆蜗轮效率一 摩擦系数 曲线
蜗杆受力例题

一、大小 Ft2=2T2/d2 =Fa1 Fa2=Ft2tang =Ft1 Fr2=Ft2tanat =Fr1 二、蜗杆受力 切向力Ft: 与转向相反。 径向力Fr:指向中心。
轴向力: 左(右)手定则。 ---螺旋线旋向为左(右)
Fn2
Fr2
Fr1
Fa2Βιβλιοθήκη Ft1gFt 2 at
5.蜗杆1受力 轴向力Fa1 径向力Fr1 切向力Ft1 6.蜗杆转向 7.蜗杆旋向 8.蜗轮旋向 n1 Fa1 1 Fr1 Fr2 Ft1 左旋
Fr2’ Ft2’ 2’ Fa2’
Fa1
Ft2
n1
Fr2 Fa2
T2
旋则用左(右)手握着蜗杆,四指方向与 转向一致,拇指方向就是蜗杆所受轴向力 的方向。 三、例题
章 头
例:已知输出轴III转 3.齿轮2’受力 向。决定各轴的转向、 轴向力Fa2’ 径向力Fr2’ 蜗轮蜗杆旋向、啮合 切向力Ft2’ 点力的方向,使II轴 4.蜗轮2受力 轴向力最小。 轴向力Fa2 nII 径向力Fr2 II I n1 切向力Ft2 2 1 左旋 Fa2 2’ n3 n2’ 2 III Ft2 3 解: Ft3 Fr3 1.齿轮2’、蜗轮2转向 2.齿轮3受力 Fa3 轴向力Fa3 径向力Fr3 3 切向力Ft3
机械设计-蜗轮蜗杆斜齿锥齿轮传动受力分析例题
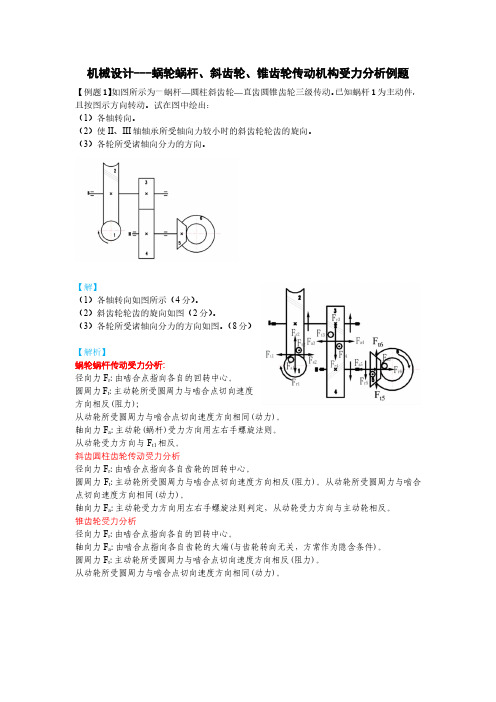
机械设计---蜗轮蜗杆、斜齿轮、锥齿轮传动机构受力分析例题【例题1】如图所示为一蜗杆—圆柱斜齿轮—直齿圆锥齿轮三级传动。
已知蜗杆1为主动件,且按图示方向转动。
试在图中绘出:
(1)各轴转向。
(2)使II、III轴轴承所受轴向力较小时的斜齿轮轮齿的旋向。
(3)各轮所受诸轴向分力的方向。
【解】
(1)各轴转向如图所示(4分)。
(2)斜齿轮轮齿的旋向如图(2分)。
(3)各轮所受诸轴向分力的方向如图。
(8分)
【解析】
蜗轮蜗杆传动受力分析:
径向力F r:由啮合点指向各自的回转中心。
圆周力F t:主动轮所受圆周力与啮合点切向速度
方向相反(阻力);
从动轮所受圆周力与啮合点切向速度方向相同(动力)。
轴向力F a:主动轮(蜗杆)受力方向用左右手螺旋法则。
从动轮受力方向与F t1相反。
斜齿圆柱齿轮传动受力分析
径向力F r:由啮合点指向各自齿轮的回转中心。
圆周力F t:主动轮所受圆周力与啮合点切向速度方向相反(阻力)。
从动轮所受圆周力与啮合点切向速度方向相同(动力)。
轴向力F a:主动轮受力方向用左右手螺旋法则判定,从动轮受力方向与主动轮相反。
锥齿轮受力分析
径向力F r:由啮合点指向各自的回转中心。
轴向力F a:由啮合点指向各自齿轮的大端(与齿轮转向无关,方常作为隐含条件)。
圆周力F t:主动轮所受圆周力与啮合点切向速度方向相反(阻力)。
从动轮所受圆周力与啮合点切向速度方向相同(动力)。
齿轮传动受力分析(补)
Fr2 Ft 2 tan
六、蜗轮蜗杆传动
2
n2
Fr1
2 n2
Fr1
Ft2
Fx2
Ft1
Fx1
n1
n1
Fr1
1
1 Fr1
在分析蜗杆和蜗轮受力方向时,必须先指明主动轮和从动 轮(一般蜗杆为主动轮);蜗杆或蜗轮的螺旋方向:左旋或右 旋;蜗杆的转向和位置。
蜗杆与蜗轮轮齿上各方向判断如下:
① 圆周力的方向:主动轮圆周力与其节点速度方向相反, 从动轮圆周力与其节点速度方向相同;
三、直齿锥齿轮传动
轮齿受力分析模型如下图:Fn可分解为圆周力Ft1,径 向力Fr1和轴向力Fx1三个分力。
各分力计算公式:
Ft1
2T1 d m1
Fr1 F 'cos1 Ft1 tan cos
Fx1 F 'sin 1 Ft1 tan sin 1
n2 从动
Fx2 Ft2 Fr2
Fr1 O
Fx1 Ft1
n1 主动
径向力、圆周力判定方法和直齿圆柱齿轮
相同;轴向力Fx的方向总是由锥齿轮的小端指
向大端。
四、两级圆柱齿轮传动的情况
n1
输入轴
中间轴 n2
n3
3
4
Fx2
3 Fx3
1
2
2
Fx1
n3
输出轴
中间轴上两个齿轮的轴向力方向相反,减轻中 间轴和轴承的受力
五、锥柱两级齿轮传动的情况
n3
中间轴 n2
Fx2
② 径向力的方向:由啮合点分别指向各自轴心;
③ 轴向力的方向 :蜗杆主动时,蜗杆轴向力的方向由 “主动轮左、右手定则”判断,即右旋蜗杆用右手(左旋用左 手),四指顺着蜗杆转动方向弯曲,大拇指指向即蜗杆轴向力 的方向。
机械设计习题总结1解读
各力方向: Ft1与主动轮回转方向相反 Ft2与从动轮回转方向相同 Fr1 、Fr2分别指向各自齿轮的轮
二、计算载荷Fnc
Fnc = K Fn = K Ft /cosα 三、齿面接触疲劳强度计算 强度条件: σH ≤ σHP (校核式) K = KA Kv KαKβ
H
4 Fn 2 aL
1
m3 2 KT1Y YFaYsa d Z12 FP
单侧受载时, σF 看成脉动循环, ( MPa) 校核式: 双侧受载时,σF 看成对称循环
σF≤σFP
(m m)
设计式:
讨论:
影响齿根弯曲疲劳强度的主要参数是模数 m
m↑ →齿厚 →截面积↑ →σF →弯曲强度 s 配对的大小齿轮的弯曲应力不等
7 疲劳破坏,则用 N 0 替代“无数”次。 如碳钢 N 0 10
(3) 材料疲劳极限
r
与 N 0 对应的值
(4) 不同 N 的疲劳极限 当 N N0 时 当 N N0 时
rN
m
N0 r N
rN r
3.
不同应力循环特征 r 时的疲劳极限
结论:
对于塑性材料
1 ( S 0 ) r S (0 1 )
措施:提高齿面硬度和齿面质量等 3、齿面胶合 配对齿轮采用异种金属时,其抗胶合能力比同种金属强 措施:采用异种金属、降低齿高、提高齿面硬度等
4、齿面磨损 是开式传动的主要失效形式
措施:改善润滑和密封条件
5、齿面塑性变形 措施:提高齿面硬度,采用油性好的润滑油
二、齿轮传动的设计准则
主要针对疲劳折断和齿面点蚀这两种失效形式
各力方向: Ft、Fr与圆柱齿轮相同 Fa1 、 Fa2 —分别指向各自齿轮的大端
蜗轮蜗杆传动承载能力计算(精选)
普通圆柱蜗杆传动承载能力计算(一)蜗杆传动的失效形式、设计准则及常用材料和齿轮传动一样,蜗杆传动的失效形式也有点蚀(齿面接触疲劳破坏)、齿根折断、曲面胶合及过度磨损等。
由于材料和结构上的原因,蜗杆螺旋齿部分的强度总是高于蜗轮轮齿的强度,所以失效经常发生在蜗轮轮齿上。
因此,一般只对蜗轮轮齿进行承载能力计算。
由于蜗杆与蜗轮齿面间有较大的相对滑动,从而增加了产生胶合和磨损失效的可能性,尤其在某些条件下(如润滑不良),蜗杆传动因齿面胶合而失效的可能性更大。
因此,蜗杆传动的承载能力往往受到抗胶合能力的限制。
在开式传动中多发生齿面磨损和轮齿折断,因此应以保证齿根弯曲疲劳强度作为开式传动的主要设计准则。
在闭式传动中,蜗杆副多因齿面胶合或点蚀而失效。
因此,通常是按齿面接触疲劳强度进行设计,而按齿根弯曲疲劳强度进行校核。
此外,闭式蜗杆传动,由于散热较为困难,还应作热平衡核算。
由上述蜗杆传动的失效形式可知,蜗杆、蜗轮的材料不仅要求具有足够的强度,更重要的是要具有良好的磨合和耐磨性能。
蜗杆一般是用碳钢或合金钢制成。
高速重载蜗杆常用15Cr或20Cr,并经渗碳淬火;也可用40、45号钢或40Cr并经淬火。
这样可以提高表面硬度,增加耐磨性。
通常要求蜗杆淬火后的硬度为40~55HRC,经氮化处理后的硬度为55~62HRC。
一般不太重要的低速中载的蜗杆,可采用40或45号钢,并经调质处理,其硬度为220~300HBS。
常用的蜗轮材料为铸造锡青铜(ZCuSnlOPl,ZCuSn5Pb5Zn5)、铸造铝铁青铜(ZCuAl10Fe3)及灰铸铁(HTl5O、HT2OO)等。
锡青铜耐磨性最好,但价格较高,用于滑动速度Vs≥3m/s的重要传动;铝铁青铜的耐磨性较锡青铜差一些,但价格便宜,一般用于滑动速度Vs≤4m/s的传动;如果滑动速度不高(Vs<2m/s),对效率要求也不高时,可采用灰铸铁。
为了防止变形,常对蜗轮进行时效处理。
(二)蜗杆传动的受力分析蜗杆传动的受力分析和斜齿圆柱齿轮传动相似。
机械设计基础第五章 齿轮传动与蜗杆传动
第十节 轮系
一、轮系及其分类 1 轮系的概念----由一系列齿轮组成的传动系统称之。
2 轮系的分类----定轴轮系和行星轮系两大类。
二、定轴轮系的传动比计算
包含传动比大小的计算和转向的确定。 1 一对 圆柱齿轮啮合的传动比
2 定轴轮系的传动比:
1)轴线平行的定轴轮系(以图5--30为例分析) 2)轴线不平行的定轴轮系(以图5--32为例分析)。 三、简单行星轮系传动比计算 四、轮系的功用 1 传递相距较远的两轴间的运动和动力;2 实现分路传 动;3 实现变速传动;4 获得大传动比;5 用做运动的合 成和分解。 作业:32、33、34、36
四、径节制齿轮简介
英、美等国的标准制度;
径节——齿数与分度圆直径(英寸)的比值。DP
第四节 渐开线齿轮的啮合
一、渐开线齿轮可以保证定传动比传动 二、渐开线齿轮传递的压力方向不变 三、渐开线齿轮中心距具有可分性
(以上三点为:渐开线齿轮传动的特点)源自四、渐开线齿轮正确啮合的条件
五、直齿轮的标准中心距
六、连续传动条件
蜗
轮
pa
2 基本参数:
1)模数m和压力角; 2)蜗杆分度圆直径和导程角(如右图);
d 1
蜗 杆 加 工
蜗 轮 加 工
3)蜗杆头数和蜗轮齿数;
4)标准中心距和传动比 3 蜗杆传动的几何尺寸(表5--10)
p z(导程)=z 1p a
三、蜗杆传动的失效和常用材料 1 蜗杆传动的失效形式 主要是蜗轮,和齿轮失效形式相似-------磨 损、胶合、疲劳点蚀和轮齿折断。 闭式传动中:胶合和点蚀; 开式传动:主要是磨损。 2 蜗杆、蜗轮的常用材料 1)蜗杆传动的相对滑动速度Vs 2)蜗杆材料 3)蜗轮材料
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
四、蜗杆传动的受力分析
F n co F n a 1 c so c s o F n t2 c so d s2 c2 o T 2 n c sos
Ft2 ⊙ Ft1
n1
Fax2
Fa1 Fr2
n2
Fr1 Fa1 x n1 Fa2 · Ft2 Ft1
n2 Fr2
2 1Ⅰ
已知:蜗杆轴Ⅰ为输入,大锥齿轮轴
3
Ⅱ为输出,轴Ⅲ转向如图。
Ⅱ
4 试:确定各轮转向、旋向及受力。
Ⅲn4 输出
1. n4→ n3 → n2 → Ft2 → Fa2 2. Fa3 → Fa2 → Ft1 →n1
齿轮传动、涡轮传动的受力分析
目录
一、直齿圆柱齿轮传动 二、斜齿圆柱齿轮传动 三、直齿圆锥齿轮传动 四、蜗杆传动
一、直齿圆柱齿轮传动
法向力:
Fn
2T1
d1 cos
圆周力: F t
2 T1 d1
径向力: Fr Ft tan
二、斜齿圆柱齿轮传动
(1)圆周力Ft的方向在主动轮上与运 动方向相反,在从动轮上与运动方向 相同; (2)轴向力Fa的方向按主动轮的螺旋 线方向和转向,用左、右手螺旋定则 来确定。 (3)主动轮右旋,用右手;左旋,用 左手:四指弯曲方向表示主动轮的回 转方向,其拇指所指方向即为主动轮 上轴向力Fa1的方向;从动轮的轴向力 Fa2与主动轮上轴向力Fa1的方向相反
指向蜗杆轴心
法向力
F r1F r2F t2tg
n
径向力
γ
Ft2
切向力
轴向力
与转动方向相反
Ft1
蜗杆左旋用左手,右旋用右手,握紧的四 指表示主动轮的回转方向,大拇指伸直的
方向表示主动轮所受轴向力的方向
Fa2
Fr2
Fr1
Fa1
方向判定: 1)旋向判定
∵
蜗轮与蜗杆旋向相同。
2)各分力方向 Fr:指向各自轮心
角
F’=Ft /cosβ
β : 节圆螺旋
三、直齿圆锥齿轮传动
两齿轮在节点啮合,忽略摩擦力,将沿齿宽分布的载
荷等效变换为集中作用在齿宽中点的法向力,通常将
法向力分解为相互垂直的三个分力:切向力、径向力、
轴向力。
主动齿轮受力计算公式:
从动齿轮受力计算公式:
F t1
2000 T 1 d m1
F t2
2000 T 2 d m2
。
斜齿圆柱齿轮轮齿的受力分析
斜齿圆柱齿轮轮齿所受总法向力Fn可分解为三个分力:
圆周力:
Ft
2T1 d1
轴向力:
Fa
Ft tg
径向力:Fr
Ft tgn cos
长方体对角面即轮齿法面
Fr c
Fa
Fn αn Ft
β
T1 F' ω1
d1 2
Frห้องสมุดไป่ตู้Fn
β
αn
F’
Ft
Fr = F’ tgαn
β
长方体底面
Fa
F’ αn :法向压力
F r 1 F t1 tan cos 1
F a1 F t1 tan sin 1
F bn
F t1 cos
F r2 F t2 tan cos 2
F a2 F t2 tan sin 2
F bn
F t2 cos
各个分力方向的确定:
各分力之间的关系:
F t2 F t1 F r 2 F a1F a 2 F r1
→ 蜗 右杆 旋
蜗轮右旋
※ Ft 蜗杆与n1反向 蜗轮与n2同向
判断旋向简易方法:蜗轮、蜗杆轴 向位于垂直位置,螺旋线左高右低 为左旋,反之为右旋。
Ft2 Fa1
蜗杆:左、右手定则
Fa 蜗轮: Fa2 Ft1 3)蜗轮转向
n2 v2
已知:n1、旋向→n2
n1
左、右手定则:四指n1、拇指反向:啮合点v2→n2
练习:
右旋
Fr1