激光接收器
关于激光对射报警系统

关于激光对射报警系统激光对射报警系统:激光对射报警系统采用了808nm波长不可见光激光技术,容易隐蔽布防,可以垂直或水平安装在防范区域内。
激光不会象无线电波、红外光那样,受到背景、不同温度物体的干扰,激光的穿透力强、误报率非常低。
防范距离远不受外界背景光的影响和干扰,在烈日下布防也不影响产品性能。
可以根据使用要求,调整探测距离,产品美观大方、安装调试方便、防水性能好适合用在室内、野外、户外等布防作业环境。
可全天候工作。
此系统产品己经通过中国公安部的质量合格认证。
应用范围广:可以广泛的应用在铁路、地铁、厂矿企业、大型油田油库、码头、图书馆、电力、博物馆、展览馆、学校、养殖场、机场警戒、监狱设防、军事重地、军械边防国境线戒备等需要重点加强监控防范、保安、防盗、边防越界、户外围场等所外环境。
激光对射报警系统的特点1.探测距离远,误报率低激光入侵探测系统与同类主动探测系统相比,对恶劣气候环境的适应性显著增强。
激光束发射的功率密度大,发散角小,光束集中,方向性好,使用同等功率器件的条件下,在百米处,目标接收激光光束的功率密度是红外发光二极管光束的数倍。
因而穿透雨、雪、雾、风沙能力强,极大降低了误报率。
2.抗干扰性强,对其它设备无干扰激光报警系统自身抗电磁干扰性强,并对警戒激光束传播通路以外的区域、设备无任何电磁干扰。
由于激光发散角小,光束集中,光束只在闭路中传输,当用多组激光探测器在直线方向接续传输或小转折角传输时。
均无红外线探测器所产生的相互串扰现象,从而消除此时红外线探钡(器产生的漏报警。
对周围环境无任何光散射、污染。
3.防范性强可实施连续交叉布防,无互相干扰的问题;可实施多道独立的光束平面、空间立体分布。
4.调整简单、适应性广1)激光对射报警系统的响应时间,可通过接收器电源板上的2路拨码开关进行200ms, 400ms, 600ms, 800ms的选择。
·2)可在一40 0C -}- 70℃的环境下正常工作,无需任何电加热器。
相位式激光测距仪激光接收部分设计

相位式激光测距仪激光接收部分设计激光测距仪是一种测量目标物体距离的工具,其原理是利用激光束在空气中传播的特性,通过测量激光束的往返时间来计算出目标物体与测距仪的距离。
激光接收部分是激光测距仪的核心组成部分之一,其设计的好坏直接影响到测量结果的准确性和稳定性。
在设计激光接收部分时,需要考虑以下几个关键因素:1.激光接收器的选择:激光接收器是接收激光信号的关键部件,其性能直接影响到激光测距仪的灵敏度和测距范围。
常见的激光接收器有光电二极管(PD)和光电效应晶体管(APD)。
PD具有较高的响应速度和较低的噪声,适用于近距离测距场景;APD具有较高的增益和较低的噪声,适用于远距离测距场景。
2.光学系统的设计:光学系统包括透镜、滤波器等光学元件,其作用是将入射的激光束聚焦到激光接收器上。
在设计光学系统时需要考虑激光束的聚焦效果、散斑噪声等因素,以提高测距仪的测量精度和信噪比。
3.信号放大和滤波电路的设计:激光接收器输出的信号很弱,需要经过放大和滤波才能得到可信的测距信号。
放大电路可以采用运算放大器等电路实现,滤波电路可以采用RC滤波器或数字滤波器等实现。
通过合理设计放大和滤波电路,可以提高信号的噪声抑制和动态范围。
4.时间测量电路的设计:激光测距仪是通过测量激光束的往返时间来计算距离的,因此需要设计一个高精度的时间测量电路。
常用的时间测量电路有计数器、时钟等,可以通过采样和比较测量激光脉冲信号的上升沿和下降沿来计算出往返时间。
在设计激光接收部分时,还需考虑以下一些技术细节:5.温度补偿:激光测距仪的测量精度受到温度的影响,尤其是光学元件和电子元件的温度变化。
因此,需要设计温度补偿电路,通过测量环境温度并补偿光学和电子元件的参考值,提高测量精度。
6.光路对齐:激光测距仪的激光发射和接收部分需要在一条直线上对准,才能确保测量结果的准确性。
因此,需要设计一个精密的光路对齐机构,确保激光束的传输方向稳定。
7.防干扰设计:激光测距仪易受到外界光源干扰,导致测量结果偏差。
激光预警接收器的一种改进方案

基 金项 目: 国家 自 然科学奖金资助项 目(0709652 1)山西省科技攻关项 目(0451X 6381 , 709 , 0 20 10Z ) 作者简介 : 王志斌 ( 9 6 ) 男 , 1 6一 , 副教授.
维普资讯
王志斌等 : 预警接 收器 的一种改进方 案 激光
图 1 激光 预警接收系统结构示意图
F g 1 Sr cu e ga h o s rf rwan n y t m i . t t r r p f a e oe r i g s se u l
其光强分布 , 将所得之 光电信号数字化并用 DP S 处理 , 实时得 出人 射激光 的波长值 和人
冲激光时的信噪 比; 增设激 光接收天线 以扩大视场 角、 提高 接收灵敏度 、 改善干涉 图的 特性 .
1 系统 结构及其工作原理概述
图1 为本系统 的结构示意图. 透镜 。 和光纤锥 c组成一个 “ 激光接收天线 ” 子系统 ,
收稿 日期 :090 -3 修订 日期 :0 60 -2 2 0 .91 ; 2 0 -61
它所接收到的人射激光束经分束镜分束 , 其 反射光束用于检测人射激光器 的人射方 向. 其透射光束用于检测其波长. 透射光束经透 准直后被柱面透镜
面阵 接收器 线阵接收器
厶 再聚焦 于实 心迈 克尔孙干涉仪 内分束面 前侧 , 该光束经迈克尔孙干涉仪和透镜 厶 产
生等倾 干涉图. 用光电转换接 收器线 阵检测
维普资讯
第l 2 4卷 期
20 0 6年 6月
应用基础与工程科学学报
J URNAL OF B I C ENC O ASC S I E AND NGI ERI E NE NG
中图分类号 :N 7 . T91 4 文献标识码 : A
激光监听_实验报告

一、实验目的1. 了解激光监听的基本原理和原理图;2. 掌握激光监听仪器的使用方法;3. 通过实验验证激光监听技术在窃听领域的应用。
二、实验原理激光监听技术是一种利用激光照射目标物体,通过声压引起的物体振动信号调制,接收反射回来的激光束并将其转化为电信号,进而实现对目标监听的技术。
其原理图如下:[原理图]三、实验仪器1. 激光监听仪;2. 光电传感器;3. 信号放大器;4. 滤波器;5. 音频处理软件;6. 玻璃板;7. 激光发射器;8. 激光接收器;9. 测量仪器(如尺子、计时器等)。
四、实验步骤1. 激光发射器照射玻璃板,反射回来的激光束被光电传感器接收;2. 光电传感器将接收到的激光束转化为电信号;3. 信号放大器对电信号进行放大;4. 滤波器对放大后的信号进行滤波,去除噪声;5. 将滤波后的信号输入音频处理软件,优化还原信号;6. 通过测量仪器(如尺子、计时器等)测量声波在玻璃板上的传播速度;7. 根据声波传播速度和信号频率,计算出声波在玻璃板上的波长;8. 根据声波波长和激光频率,计算出声波在玻璃板上的传播时间;9. 根据声波传播时间和信号幅度,计算出声波在玻璃板上的振动幅度;10. 通过振动幅度和声波频率,还原出声波信号。
五、实验结果与分析1. 实验过程中,成功接收到了反射回来的激光束,并将其转化为电信号;2. 经过放大、滤波和优化还原后,成功还原出了声波信号;3. 通过测量仪器,成功测量出了声波在玻璃板上的传播速度;4. 根据实验数据,计算出声波在玻璃板上的波长和传播时间;5. 通过振动幅度和声波频率,成功还原出了声波信号。
六、实验结论1. 激光监听技术能够有效地实现对目标的监听,具有隐蔽性强、抗干扰能力强等优点;2. 激光监听技术在窃听领域具有广泛的应用前景;3. 通过本次实验,掌握了激光监听仪器的使用方法,为后续相关实验奠定了基础。
七、实验注意事项1. 实验过程中,注意保持实验环境的安静,避免外界噪声干扰;2. 激光发射器和接收器应保持垂直于玻璃板,以确保激光束能够垂直照射到玻璃板上;3. 在调整激光发射器和接收器位置时,注意观察信号变化,以确定最佳位置;4. 在进行信号放大、滤波和优化还原时,注意调整参数,以确保信号质量;5. 实验过程中,注意安全,避免激光束直接照射到人眼。
激光检测原理
激光检测原理
激光检测原理是利用激光光束的特性来测量目标物体的特征和位置。
激光是一种具有高度定向性、单色性和相干性的光源,能够以非常狭窄和集中的光束照射在目标物体上。
当激光光束照射到目标物体上时,光束与物体相互作用,产生反射、散射、吸收等现象。
这些光学效应会改变光束的特性,如光的方向、强度、频率和极化态等。
激光检测系统通过接收反射回来的光束来分析目标物体的特征和位置。
一般来说,激光检测系统由发射器、目标物体、接收器和信号处理器组成。
发射器产生激光光束,将其照射到目标物体上。
接收器接收返回的光束,并将其转换为电信号。
信号处理器对接收到的电信号进行分析和处理,得到目标物体的特征和位置信息。
在激光检测中,常用的检测方法包括激光雷达、激光测距仪和激光光栅等。
激光雷达利用激光束的回波时间来测量目标物体的距离和位置。
激光测距仪通过测量光束的飞行时间来计算目标物体到测量仪的距离。
激光光栅则利用光栅的衍射原理来测量目标物体的位置和位移。
总之,激光检测原理利用激光光束与目标物体之间的相互作用来获得目标物体的特征和位置信息。
这种非接触式的测量方法具有高精度、快速和灵敏的特点,在工业制造、环境监测、安全检测等领域有广泛的应用。
里德堡接收机原理

里德堡接收机原理
里德堡接收机是一种用于接收激光信号的光谱分析仪器,它
基于里德堡技术,利用光学原理实现对光信号的频率分析。
里德堡接收机的原理主要基于光谱分析中的里德堡原理。
里
德堡原理是指原子或分子的能级在不同能量的光激发下发生变化,从而产生不同频率的辐射光谱。
而里德堡接收机则利用这
个原理通过光的频率分析来获取激光信号的特征信息。
里德堡接收机的工作原理可以简单描述如下:
1.激光信号进入接收器:被测的激光信号通过光纤或者其他
光学元件进入接收器。
2.激光信号与玻璃腔发生作用:激光信号进入里德堡接收器后,会在一个光学腔体中与其中的玻璃材料发生作用。
玻璃材
料对于不同频率的光具有不同的折射率,因此光的传输速度会
因频率不同而有所差别。
3.光信号通过光纤传输:在接收器中,光信号通过光纤传输,进入一个光电探测器。
4.光电探测器转换为电信号:光电探测器将光信号转换成电
信号,这个过程主要是利用光电效应。
5.信号处理与频率分析:接收到的电信号经过信号处理和放大,然后进入频率分析模块。
频率分析模块可以分析电信号中
包含的不同频率的成分,并将分析结果输出。
6.结果输出:最后,里德堡接收机将分析得到的频率信息通过显示屏、计算机或其他输出设备展示给用户。
总之,里德堡接收机的原理是基于光的频率分析来获取激光信号的特征信息。
通过在光信号中引入玻璃腔体,并利用其对不同频率的光的折射率差异,可以实现对光信号频率的分析和测量。
这种原理使得里德堡接收机在激光信号的频率测量和分析方面应用广泛。
机载激光雷达系统组成讲解
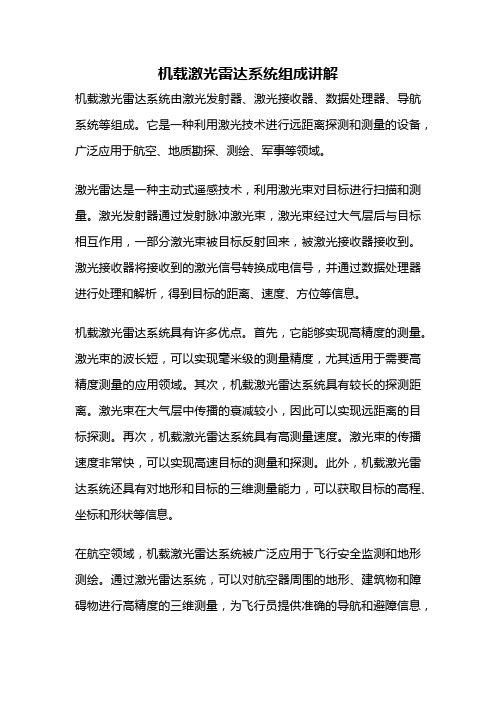
机载激光雷达系统组成讲解机载激光雷达系统由激光发射器、激光接收器、数据处理器、导航系统等组成。
它是一种利用激光技术进行远距离探测和测量的设备,广泛应用于航空、地质勘探、测绘、军事等领域。
激光雷达是一种主动式遥感技术,利用激光束对目标进行扫描和测量。
激光发射器通过发射脉冲激光束,激光束经过大气层后与目标相互作用,一部分激光束被目标反射回来,被激光接收器接收到。
激光接收器将接收到的激光信号转换成电信号,并通过数据处理器进行处理和解析,得到目标的距离、速度、方位等信息。
机载激光雷达系统具有许多优点。
首先,它能够实现高精度的测量。
激光束的波长短,可以实现毫米级的测量精度,尤其适用于需要高精度测量的应用领域。
其次,机载激光雷达系统具有较长的探测距离。
激光束在大气层中传播的衰减较小,因此可以实现远距离的目标探测。
再次,机载激光雷达系统具有高测量速度。
激光束的传播速度非常快,可以实现高速目标的测量和探测。
此外,机载激光雷达系统还具有对地形和目标的三维测量能力,可以获取目标的高程、坐标和形状等信息。
在航空领域,机载激光雷达系统被广泛应用于飞行安全监测和地形测绘。
通过激光雷达系统,可以对航空器周围的地形、建筑物和障碍物进行高精度的三维测量,为飞行员提供准确的导航和避障信息,提高飞行安全性。
此外,机载激光雷达系统还可以用于地理信息系统(GIS)的建设,通过对地表地貌的测量,实现地理信息的采集和更新。
在地质勘探和测绘领域,机载激光雷达系统被应用于地形测绘和地质灾害监测。
通过激光雷达系统,可以获取地表的高程和形状信息,为地质勘探和地质灾害监测提供准确的数据支持。
此外,机载激光雷达系统还可以用于海洋测量和海洋资源勘探,通过对海洋表面的反射激光进行测量,可以获取海洋的波浪、潮汐和海流等信息。
在军事领域,机载激光雷达系统被广泛应用于目标探测和情报获取。
通过激光雷达系统,可以实现对地面、海面和空中目标的探测和跟踪,为军事侦察和目标打击提供准确的数据支持。
激光传感器标定尺原理

激光传感器标定尺原理激光传感器标定尺是一种利用激光技术进行测量和校准的仪器。
它通过发射激光束并测量激光束的反射时间来确定物体与传感器之间的距离。
激光传感器标定尺的原理主要包括激光发射、激光接收和距离计算三个部分。
激光传感器标定尺通过发射激光束来测量目标物体的距离。
激光发射器产生一束高度集中的激光束,该激光束在发射器的控制下以固定的频率和角度发射出去。
激光束具有高度的定向性和一定的光束发散角度,能够在较远的距离内保持较小的尺寸。
当激光束照射到目标物体上时,部分激光束会被目标物体反射。
激光传感器标定尺中的激光接收器接收到反射回来的激光束,并将其转化为电信号。
接收到的激光信号的强度与目标物体的距离有关。
激光传感器标定尺通过测量接收到的激光信号的强度来计算目标物体与传感器之间的距离。
激光传感器标定尺利用测量到的激光信号的时间差来计算目标物体与传感器之间的距离。
由于光在真空中传播的速度是已知的,因此可以根据激光信号的往返时间来计算目标物体与传感器之间的距离。
通过对激光信号的时延进行精确测量和计算,可以得到非常准确的距离值。
激光传感器标定尺的标定是非常重要的,它可以确保测量结果的精确性和可靠性。
标定过程中,需要通过与已知距离的标准物体进行对比来校准传感器的测量结果。
标定可以校正传感器的测量误差,并提高测量精度。
总结起来,激光传感器标定尺利用激光技术测量目标物体与传感器之间的距离。
它通过发射激光束、接收反射的激光信号,并通过测量信号的时间差来计算距离。
标定是确保测量结果准确可靠的关键步骤。
激光传感器标定尺的应用非常广泛,在工业、测量和自动化控制等领域都有重要的应用价值。
随着激光技术的不断发展,激光传感器标定尺的性能将进一步提高,应用范围也将更加广泛。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
激光接收装置的原理大都相同,激光经过光学透镜校准, 被光敏器件(光电二极管)接收, 光电二极管接收光照后, 随光强不同会产生相应强度的光生电流, 电流经过放大器放大输出电信号.
常见的激光接收装置比如光功率计的原理就是前面提到的,我们小组最先考虑为选择光功率计,可以利用其中的电流的改变,进一步的将脉冲信号直接输入进单片机里,直接进行判断,但经过小组的讨论,我们一致认为在我们所做的装置中,只有一束激光是不行的,我们需要在大范围内拥有相同频率的激光束,但找到两个完全一样的激光发射器是相当困难的,我们请教物理院老师之后,老师给出指导,可以在激光发射器之前加一扩束仪,激光通过扩束仪之后,会大面积形成相同频率的激光区域,这有利于简单我们的装置的单片机的程序。
同时对光功率计进行改造,连接一块面积相当的硅光电池,硅光电池是一种直接把光能转换成电能的半导体器件。
它的结构很简单,核心部分是一个大面积的PN 结,把一只透明玻璃外壳的点接触型二极管与一块微安表接成
闭合回路,当二极管的管芯(PN结)受到光照时,你就会看到微安表的表针发生偏转,显示出回路里有电流,这个现象称为光生伏特效应。
硅光电池的PN结面积要比二极管的PN结大得多,所以受到光照时产生的电动势和电流也大得多。
这样我们就装置好我们所需要的激光接受装置。