第5章习题解答
第5章 相平衡习题解答

⑵ 图中,组成为 xB=0.800 的液相的泡点: t 110.2 C ; ⑶ 图中,组成为 yB =0.800 的气相的露点: t 112.8 C ; ⑷ 求 105℃时气-液平衡两相的组成: xB 0.417 , yB 0.544 ;
xB
1
xA
0.541
p pA pB 54.22 0.459 136.12 0.541 98.53kPa
yA
pA pA pB
54.22 0.541
0.2526
54.22 0.459 136.12 0.541
yB
pB pA pB
136.12 0.459
0.7474
54.22 0.459 136.12 0.541
答: ⑴ p=98.54kPa,yB=0.7476;⑵ p=80.40kPa,xB=0.3197; ⑶ yB=0.6825,xB=0.4613,nB(l)=1.709mol,nB(g)=3.022mol 5-7 在 101.325kPa 下,水(A) -醋酸(B)系统的气-液平衡数据如下:
t/℃
100
100 92 0.45
2.415
mB (2.415 100 / 92) 18 23.91kg
第五章 相平衡习题解答
5-1 指出下列平衡系统中的物种数 S、组分数 C、相数 P 和自由度数 f。 ⑴ C2H5OH 与水的溶液; ⑵ I2(s)与 I2(g)成平衡; ⑶ NH4HS(s)与任意量的 H2S(g)及 NH3(g)达到平衡; ⑷ NH4HS(s)放入抽空的容器中分解达平衡; ⑸ CaCO3(s)与其分解产物 CaO(s)和 CO2(g)成平衡; ⑹ CHCl3 溶于水中、水溶于 CHCl3 中的部分互溶系统及其蒸气达到相平衡。 解:(1)物种数 S=2,组分数 C=2、相数 P=1,自由度数 f=C-P+2=3;
第5章感应电机习题与解答
C ;D 。
答A
6.★三相异步电动机气隙增大,其他条件不变,则空载电流( )。
A 增大 ; B 减小 ;
C 不变 ; D 不能确定。
答A
7.三相感应电动机等效电路中的附加电阻 上所消耗的电功率应等于():
A输出功率 ;B输入功率 ;
C电磁功率 ;D总机械功率 。
答D
8.与普通三相感应电动机相比,深槽、双笼型三相感应电动机正常工作时,性能差一些,主要是()。
答A
12.★设计在 电源上运行的三相感应电动机现改为在电压相同频率为 的电网上,其电动机的()。
A 减小, 减小, 增大;B 减小, 增大, 减小;
C 减小, 减小, 减小;D 增大, 增大, 增大。
答C
13.一台绕线式感应电动机,在恒定负载下,以转差率 运行,当转子边串入电阻 ,测得转差率将为()( 已折算到定子边)。
。
答1,
4.★感应电动机起动时,转差率 ,此时转子电流 的值, ,主磁通比,正常运行时要 ,因此起动转矩 。
答 1,很大,很小,小一些,不大
5.★一台三相八极感应电动机的电网频率 ,空载运行时转速为735转/分,此时转差率为,转子电势的频率为。当转差率为0.04时,转子的转速为,转子的电势频率为。
答0.02, , ,
6.三相感应电动机空载时运行时,电机内损耗包括,,,和,电动机空载输入功率 与这些损耗相平衡。
答定子铜耗,定子铁耗,机械损耗,附加损耗
7.三相感应电机转速为 ,定子旋转磁场的转速为 ,当 时为运行状态;当 时为运行状态;当 与 反向时为运行状态。
答电动机,发电机,电磁制动
8.增加绕线式异步电动机起动转矩方法有 ,。
A4极, ; B6极, ;
第5章思考题和习题解答

第五章 电气设备的选择5-1 电气设备选择的一般原则是什么?答:电气设备的选择应遵循以下3项原则:(1) 按工作环境及正常工作条件选择电气设备a 根据电气装置所处的位置,使用环境和工作条件,选择电气设备型号;b 按工作电压选择电气设备的额定电压;c 按最大负荷电流选择电气设备和额定电流。
(2) 按短路条件校验电气设备的动稳定和热稳定 (3) 开关电器断流能力校验5-2 高压断路器如何选择? 答:(1)根据使用环境和安装条件来选择设备的型号。
(2)在正常条件下,按电气设备的额定电压应不低于其所在线路的额定电压选择额定电压,电气设备的额定电流应不小于实际通过它的最大负荷电流选择额定电流。
(3)动稳定校验(3)max shi i ≥ 式中,(3)sh i 为冲击电流有效值,max i 为电气设备的额定峰值电流。
(4)热稳定校验2(3)2th th ima I t I t ∞≥式中,th I 为电气设备在th t 内允许通过的短时耐热电流有效值;th t 为电气设备的短时耐热时间。
(5)开关电器流能力校验对具有分断能力的高压开关设备需校验其分断能力。
设备的额定短路分断电流不小于安装地点最大三相短路电流,即(3).max cs K I I ≥5-3跌落式熔断器如何校验其断流能力?答:跌落式熔断器需校验分断能力上下限值,应使被保护线路的三相短路的冲击电流小于其上限值,而两相短路电流大于其下限值。
5-4电压互感器为什么不校验动稳定,而电流互感器却要校验?答:电压互感器的一、二次侧均有熔断器保护,所以不需要校验短路动稳定和热稳定。
而电流互感器没有。
5-5 电流互感器按哪些条件选择?变比又如何选择?二次绕组的负荷怎样计算? 答:(1)电流互感器按型号、额定电压、变比、准确度选择。
( 2)电流互感器一次侧额定电流有20,30,40,50,75,100,150,200,400,600,800,1000,1200,1500,2000(A )等多种规格,二次侧额定电流均为5A ,一般情况下,计量用的电流互感器变比的选择应使其一次额定电流不小于线路中的计算电流。
第5章 相平衡习题解答
5-5 根据下面给出的 I2 的数据,绘制相图。(已知: s l )
三相点
临界点
熔点
t/℃
113
512
114
p/kPa
12.159
11754
101.325
解:碘的相图如下:
答:t=84℃
沸点 184 101.325
解:(1)由表中的数据,绘制水(A) -醋酸(B)系统的温度-组成图如下:
⑵ 图中,组成为 xB=0.800 的液相的泡点: t 110.2 C ; ⑶ 图中,组成为 yB =0.800 的气相的露点: t 112.8 C ; ⑷ 求 105℃时气-液平衡两相的组成: xB 0.417 , yB 0.544 ;
答:⑴ S=2,C=2,P=1,f=2; ⑵ S=1,C=1,P=2,f=1; ⑶ S=3,C=3,P=2,f=2; ⑷ S=3,C=1,P=2,f=1; ⑸ S=3,C=2,P=2,f=2; ⑹ S=2,C=2,P=3,f=1
5-2 试求下列平衡系统的组分数 C 和自由度数 f 各是多少? ⑴ 过量的 MgCO3(s)在密闭抽空容器中,温度一定时,分解为 MgO(s)和 CO2(g); ⑵ H2O(g)分解为 H2(g) 和 O2(g); ⑶ 将 SO3(g)加热到部分分解; ⑷ 将 SO3(g)和 O2(g)的混合气体加热到部分 SO3(g)分解。 解:(1)物种数 S=3,组分数 C=2、相数 P=3,自由度数 f*=C-P+1=0;
所以,压力降到 98.53kPa 时,开始产生气相,此气相的组成 yB=0.7474;
(2)当气相组成: yB 0.541时,
yB
第5章振动和波动习题解答

第5章 振动和波动5-1 一个弹簧振子 m=:0.5kg , k=50N ;'m ,振幅 A = 0.04m ,求 (1) 振动的角频率、最大速度和最大加速度;(2) 振子对平衡位置的位移为 x = 0.02m 时的瞬时速度、加速度和回复力; (3) 以速度具有正的最大值的时刻为计时起点,写出振动方程。
频率、周期和初相。
A=0.04(m) 二 0.7(rad/s) 二-0.3(rad)⑷10.11(Hz) T 8.98(s)2 n、5-3证明:如图所示的振动系统的振动频率为1 R +k 2式中k 1,k 2分别为两个弹簧的劲度系数,m 为物体的质量V max 二 A =10 0.04 = 0.4(m/s) a max 二 2A =102 0.04 =4(m/s 2) ⑵设 x =Acos(,t :;;■『),贝Ud x vA sin(,t 「)dtd 2xa一 dt 2--2Acos(「t 亠 ^ ) - - 2x当 x=0.02m 时,COS (;:, t :忙)=1/ 2, sin( t 「)= _、一3/2,所以 v ==0.2、.3 ==0.346(m/s) 2a = -2(m/s )F 二 ma = -1(N)n(3)作旋转矢量图,可知:2x =0. 0 4 c o st(1 0)25-2弹簧振子的运动方程为 x =0.04cos(0.7t -0.3)(SI),写出此简谐振动的振幅、角频率、严...U ・」|1岛解:以平衡位置为坐标原点,水平向右为 x 轴正方向。
设物体处在平衡位置时,弹簧 1的伸长量为Xg ,弹簧2的伸长量为x 20,则应有_ k ] X ]0 ■木2乂20 = 0当物体运动到平衡位置的位移为 X 处时,弹簧1的伸长量就为x 10 X ,弹簧2的伸长量就为X 20 -X ,所以物体所受的合外力为F - -k i (X io X )k 2(X 20 -x)- -(匕 k 2)x2d x (k i k 2)dt 2 m上式表明此振动系统的振动为简谐振动,且振动的圆频率为5-4如图所示,U 形管直径为d ,管内水银质量为 m ,密度为p 现使水银面作无阻尼 自由振动,求振动周期。
第5章 刚体的定轴转动 习题解答
对飞轮,由转动定律,有 式中负号表示摩擦力的力矩方向与角速度 方向相反。
联立解得
以 F 100 N 等代入上式,得
Fr R 2 (l1 l2 ) F J mRl1
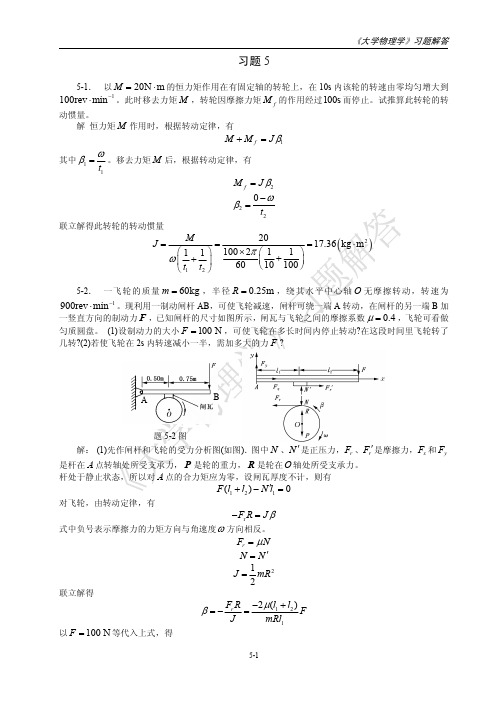
5-1
第 5 章 刚体的定轴转动
2 0.40 (0.50 0.75) 40 100 rad s 2 60 0.25 0.50 3 t
由以上诸式求得角加速度
(2)
Rm1 rm2 g I m1 R 2 m2 r 2 0.2 2 0.1 2
1 1 10 0.202 4 0.102 2 0.202 2 0.102 2 2
9.8 6.13 rad s 2
T2 m2 r m2 g 2 0.10 6.13 2 9.8 20.8N T1 m1 g m1 R 2 9.8 2 0.2. 6.13 17.1N v 2a1h 2 Rh 2 6.13 0.2 2 2.21 m s 1
M M f J 1
t1
。移去力矩 M 后,根据转动定律,有
M f J 2
2
联立解得此转轮的转动惯量
0 t2
J
M 20 17.36 kg m 2 1 1 1 100 2 1 60 10 100 t1 t2
v0
6(2 3 3m M l J l 1M (1 2 ) (1 ) 2 ml 2 3m 12 m
(2) 由①式求得相碰时小球受到的冲量为:
I Fdt mv mv mv0
负号说明所受冲量的方向与初速度方向相反。
概率论习题解答(第5章)

概率论习题解答(第5章)第5章习题答案三、解答题1. 设随机变量X 1,X 2,…,X n 独⽴同分布,且X ~P (λ),∑==ni i X n X 11,试利⽤契⽐谢夫不等式估计}2|{|λλ<-X P 的下界。
解:因为X ~P (λ),∑∑===?===n i i n i i n nX E n X n E X E 111)(1)1()(λλλλn n nX D n X n D X D n i i n i i 11)(1)1()(2121====∑∑==由契⽐谢夫不等式可得nn X P 4114/1}2|{|-=-≥<-λλλλ 2. 设E (X ) = – 1,E (Y ) = 1,D (X ) = 1,D (Y ) = 9,ρ XY = – 0.5,试根据契⽐谢夫不等式估计P {|X + Y | ≥ 3}的上界。
解:由题知()()()Y X Y X E E E +=+=()11+-=0Cov ()Y X ,=()()Y D X D xy ??ρ=()915.0??-= -1.5()()()()()75.1291,2=-?++=++=+Y X Cov Y D X D Y X D所以{}{}97303≤≥-+P =≥+)(Y X Y X P 3. 据以往经验,某种电器元件的寿命服从均值为100⼩时的指数分布.现随机地取16只,设它们的寿命是相互独⽴的.求这16只元件的寿命的总和⼤于1920⼩时的概率.解:设i 个元件寿命为X i ⼩时,i = 1 ,2 , ...... , 16 ,则X 1 ,X 2 ,... ,X 16独⽴同分布,且 E (X i ) =100,D (X i ) =10000,i = 1 ,2 , ...... , 16 ,4161161106.1)(,1600)(?==∑∑==i i i i D E X X ,由独⽴同分布的中⼼极限定理可知:∑=16i iX近似服从N ( 1600 , 1.6?10000),所以>∑=1920161i i X P =≤-∑=19201161i i X P ???-≤?--=∑=16000016001920100006.116001161i i X P()8.01Φ-==1- 0.7881= 0.21194. 某商店负责供应某地区1000⼈商品,某种商品在⼀段时间内每⼈需要⽤⼀件的概率为0.6,假定在这⼀时间段各⼈购买与否彼此⽆关,问商店应预备多少件这种商品,才能以99.7%的概率保证不会脱销(假定该商品在某⼀时间段内每⼈最多可以买⼀件).解:设商店应预备n 件这种商品,这⼀时间段内同时间购买此商品的⼈数为X ,则X ~ B (1000,0.6),则E (X ) = 600,D (X ) = 240,根据题意应确定最⼩的n ,使P {X ≤n }= 99.7%成⽴. 则P {X ≤n })75.2(997.0)240600(240600240600ΦΦP ==-≈-≤-=n n X 所以6.64260024075.2=+?=n ,取n =643。
第5章 习题及答案

第五章 汇编语言程序设计1、画图说明下列语句所分配的存储器空间及初始化的数据值。
难度:2(1) BYTE_VAR DB ‘BYTE’,12,-12H ,3 DUP(0,2 DUP(1,2),7) (2) WORD_VAR DW 3 DUP(0,1,2),7,-5,’BY’,’TE’,256H 答:(1) (2)07H BYTE_V AR 42H WORD_V AR 00H 00H 59H 00H FBH 54H 01H FFH 45H 00H 59H 0CH 02H 42H EEH 00H 45H 00H 00H 54H 01H 00H 56H 02H 01H 02H 01H 00H 02H 02H 07H 00H 00H 00H 01H 00H 02H 01H 01H 00H 02H 02H 07H 00H 00H 00H 01H 00H 02H 01H 01H 00H 02H 02H07H00H2、假设程序中的数据定义如下: PARTNO DW ?PNAME DB 16 DUP(?) COUNT DD ? PLENTH EQU $- PARTNO 问:PLENTH 的值为多少?他表示什么意义? 答:PLENTH 的值为22,它表示当前已分配单元空间。
《微型计算机原理》第5章习题与解答3、有符号定义语句如下:难度:2BUF DB 1,2,3,’123’EBUF DB 0L EQU EBUF-BUF问:L的值是多少?答:L的值为6;4、假设成序中的数据定义如下:难度:2LNAME DB 30 DUP(?)ADDRESS DB 30 DUP(?)CITY DB 15 DUP(?)CODE_LIST DB 1,7,8,3,2(1)用一条MOV指令将LNAME的偏移地址存入BX。
(2)用一条指令将CODE_LIST的头两个字节的内容放入SI。
(3)写一条伪指令定义符使CODE_LENGTH的值等于 CODE_LIST域的实际长度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5-1 凸轮以匀角速度ω绕O 轴转动,杆AB 的A 端搁在凸轮上。
图示瞬时AB 杆处于水平位置,OA 为铅直。
试求该瞬时AB 杆的角速度的大小及转向。
解: r e a v v v += 其中,22e r v e -=ω
e v v e a ωφ==tg
所以 l
e
l v a AB ωω=
=
(逆时针)
5-2. 平底顶杆凸轮机构如图所示,顶杆AB 可沿导轨上下移动,偏心圆盘绕轴O 转动,轴O 位于顶杆轴线上。
工作时顶杆的平底始终接触凸轮表面。
该凸轮半径为R ,偏心距e OC =,凸轮绕轴O 转动的角速度为ω,OC 与水平线成夹角ϕ。
求当︒=0ϕ时,顶杆的速度。
(1)运动分析
轮心C 为动点,动系固结于AB ;牵连运动为上下直线平移,相对运动为与平底平行直线,绝对运动为绕O 圆周运动。
(2)速度分析,如图b 所示
5-3. 曲柄CE 在图示瞬时以ω0绕轴E 转动,并带动直角曲杆ABD 在图示平面内运动。
若d 为已知,试求曲杆ABD 的角速度。
解:1、运动分析:动点:A ,动系:曲杆O 1BC ,牵连运动:定轴转动,相对运动:直线,绝对运动:圆周运动。
2、速度分析:r e a
v v v +=
0a 2ωl v =;0e a 2ωl v v ==
01e
1
ωω==
A
O v BC O (顺时针) 5-4. 在图示平面机构中,已知:AB OO =1,cm 31===r B O OA ,摇杆D O 2在
D 点与套在A
E 杆上的套筒铰接。
OA 以匀角速度rad/s 20=ω转动,
cm 332==l D O 。
试求:当︒=30ϕ时,D O 2的角速度和角加速度。
解:取套筒D 为动点,动系固连于AE 上,牵连运动为平动 (1)由r e a v v v += ①
得D 点速度合成如图(a ) 得 ϕtg e a v v =, 而r v e 0ω= 因为 r v a 033
1
ω⨯=
,所以 rad/s 67.02
==
l
v a
D O ω 方向如图(a)所示
(2)由r e n
a a a a a a +=+τ ②
得D 点加速度分析如图(b ) 将②式向DY 轴投影得
θϕϕτsin sin cos e n a a a a a -=- 而r a l
a e D O n a 2
02
2
ωω==
θϕsin sin r l =
所以ϕ
θ
ϕτ
cos sin sin e n
a a a a a -=
2rad/s 05.2cos sin sin 2
-=-==ϕ
θϕετl a a l a e n a a D
O ,方向与图(b)所示相反。
.
5-5.图示铰接平行四边形机构中,m m 10021==B O A O ,又AB O O =21,杆A O 1以等角速度s rad 2=ω绕1O 轴转动。
杆AB 上有一套筒C ,此筒与杆CD 相铰接。
机构的各部件都在同一铅直面内。
求当︒=60ϕ时,杆CD 的速度和加速度。
5-6. 平面内的曲柄连杆机构带动摇杆EH 绕E 轴摆动,在连杆ABD 上装有两个滑块,滑
块B 沿水平槽滑动,而滑块D 则沿摇杆EH 滑动。
已知:曲柄OA 以匀角速度ω逆时针转动,OA =AB =BD =r 。
在图示位置时θ=300,EH ⊥OE 。
试求该瞬时摇杆EH 的角速度ωE 和角加速度αE 。
5-7图示圆盘绕AB 轴转动,其角速度rad/s 2t =ω。
点M 沿圆盘半径ON 离开中
心向外缘运动,其运动规律为mm 402t OM =。
半径ON 与AB 轴间成︒60倾角。
求当s 1=t 时点M 的绝对加速度的大小。
解 点M 为动点,动系Oxyz 固结于圆盘;牵连运动为定轴转动,相对运动为沿径向直线运动,绝对运动为空间曲线。
其中轴x 垂直圆盘指向外,加速度分析如图所示,当t =1 s 时
代入数据得
5-8.半径r 的圆环以匀角速度ω绕垂直于 纸面的O 轴转动,OA 杆固定于水平方向,小环M 套在大圆环及杆上。
试用点的合成运动方法求当OC 垂直于CM 时,小环M 的速度和加速度。
解:以小环M 为动点,圆环上固结动系 (1)求
ω
ωω
ωr V r V r OM V V V V M r e r
e M 2 ,2 2 ===
=+=得式中
方向如图所示。
(2)求M α
2
222
222 424/2 ,45cos 45cos ,ωωωωωωξααααατ
r a r V a r r V a r M O a a a a a M r k r n r n
e k
n r n
e M k
r n r n e M ======⋅=-+=+++=得式中得
轴投影上式在
方向如图所示。
5-9.已知:OA 杆以匀角速度ω0=2rad/s 绕O 轴转动,半径r=2cm 的小轮沿OA 杆作无滑动的滚动,轮心相对OA 杆的运用规律b=4t 2(式中b 以cm 计,t 以s 计)。
当t=1s 时,φ=60°,试求该瞬时轮心O 1的绝对速度和绝对加速度。
解:动点:轮心O 1,动系:固结OA 杆
r e a v v v +=
2
2
y 222
21/2
0r
e 2r 2e cm/s cm/s cm/s cm/s cm/s cm/s cm/s
)]cos(63.4v 2v v [v
cm/s cm/s 32524626862683229179488948212
200001.)a a (a .sin a a a a .cos a a ,a v a .a a a a a .v v .OO v /y x n e c r n e x r r c n e c
r n e a a r e =+==-==-=====++==-+===⋅=ωω
5-10. 图示直角曲杆OBC 绕O 轴转动,使套在其上的小环P 沿固定直杆OA 滑
动。
已知:m 1.0=OB ,曲杆的角速度s rad 5.0=ω,角加速度为零。
求当︒=60ϕ时,小环P 的速度和加速度。
解:1、运动分析(图5-4):
动点:小环M ;动系:固连于OBC ; 绝对运动:沿OA 杆的直线运动; 相对运动:沿BC 杆的直线运动;
牵连运动:绕O 点的定轴转动。
2、速度分析:
r e a v v v += (a ) 其中 v a 、v e 、v r 方向如图所示。
v e =OP ω⋅=0.2×0.5=0.1m/s ;
于是(a)式中只有v a 、v r 二者大小未知。
从而由速度平行四边形解得小环M 的速度
v a
e =0.173m/s
此外,还可求得
v r =2 v e =0.2m/s 。
2.加速度分析(图5-10)。
a a =en a +r a +C a
应用投影方法,将上式加速度合成定理的矢量方程沿垂直BC 方向投影,有
a en cos cos C a a a =-+ϕϕ a en 2C a a a =-+
由此解得
35.0a ==a a M m/s 2
方向如图所示。
5-11.绕轴O 转动的圆盘及直杆OA 上均有一导槽,两导槽间有一活动销子M 如图所示,m 1.0=b 。
设在图示位置时,圆盘及直杆的角速度分别为s rad 91=ω和
s rad 32=ω。
求此瞬时销子M 的速度和加速度。
解 (1)运动分析
① 活动销子M 为动点,动系固结于轮O ;牵连运动为绕O 定轴转动,相对运动为沿轮上导槽直线,绝对运动为平面曲线。
② 活动销子M 为动点,动系固结于杆OA ;牵连运动为绕O 定轴转动,相对运动为沿OA 直线,绝对运动为平面曲线。
速度分析如图b 所示,由式(1)、(2)得
5-12.直线AB以大小为
v的速度沿垂直于AB的方向向上移动;直线CD以大小
1
为
v的速度沿垂直于CD的方向向左上方移动,如图所示。
如两直线间的交角为2
,求两直线交点M的速度和加速度。