双手作业分析调查报告(1)
双手调节实验报告
双手调节实验报告双手调节实验报告引言:人类的双手是一项非常重要的生理特征,它们不仅具备了强大的力量和灵活性,还能够进行精细的调节和协调。
在日常生活中,我们经常使用双手进行各种活动,如写字、打字、拿取物品等。
然而,我们对双手的调节能力了解得还不够深入。
本实验旨在探究双手调节的机制和特点。
实验方法:我们招募了20名年龄在20-30岁之间的健康成年人作为实验对象。
实验过程中,被试者坐在一张舒适的椅子上,双手放在桌子上。
实验仪器包括一个平衡木和一些小球。
被试者的任务是用双手同时将小球放在平衡木的两端,并保持平衡木水平不倾斜。
实验结果:通过对实验数据的统计和分析,我们得出了以下结论:1. 双手的协调能力:实验结果显示,大部分被试者能够成功地将小球放在平衡木的两端,并保持平衡木的水平。
这表明人类双手具备较强的协调能力,能够同时进行精细的调节动作。
然而,有少数被试者在实验过程中出现了困难,无法保持平衡木的水平。
这可能与个体差异、经验和技巧水平有关。
2. 双手的力量控制:实验中,我们还对被试者的力量控制能力进行了测试。
结果显示,大部分被试者能够掌握适当的力度,使小球不会掉落。
然而,有一些被试者在力量控制上表现出较大的困难,导致小球频繁掉落。
这可能与肌肉力量、神经控制和感知反馈等因素有关。
3. 双手的感知反馈:实验中,我们观察到一些被试者在调节过程中会用手指触摸平衡木,以获取更准确的感知反馈。
这表明双手的感知能力在调节过程中起到了重要的作用。
感知反馈可以帮助我们更好地掌握物体的位置和力度,并进行相应的调整。
讨论:本实验结果对我们理解双手调节的机制和特点具有重要意义。
首先,双手的协调能力是我们进行各种活动的基础,它使我们能够同时进行多个动作,并保持良好的控制。
其次,双手的力量控制能力对于完成一些精细的动作至关重要,如书写、绘画等。
最后,双手的感知反馈能力使我们能够更好地感知和掌握物体的位置、形状和力度,从而进行相应的调节和操作。
基础报告,双手作业分析图
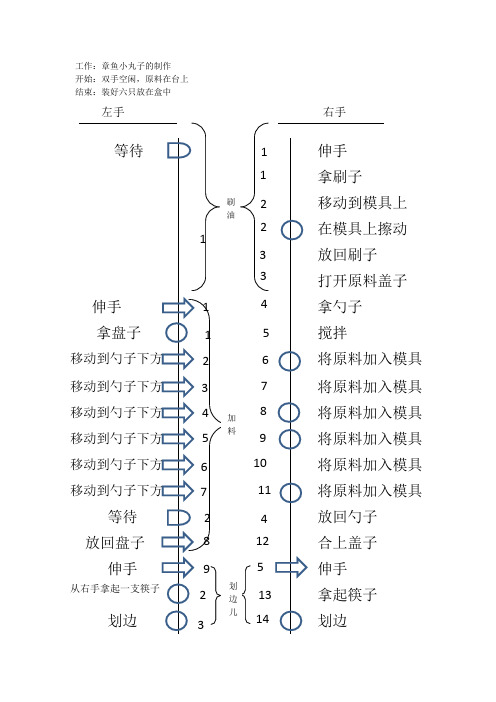
工作:章鱼小丸子的制作 开始:双手空闲,原料在台上 结束:装好六只放在盒中左手 右手等待伸手 拿刷子 移动到模具上 在模具上擦动 放回刷子 打开原料盖子 伸手 拿勺子 拿盘子搅拌移动到勺子下方 将原料加入模具 移动到勺子下方 将原料加入模具 移动到勺子下方 将原料加入模具 移动到勺子下方 将原料加入模具 移动到勺子下方 将原料加入模具 移动到勺子下方将原料加入模具 等待 放回勺子 放回盘子 合上盖子 伸手伸手 从右手拿起一支筷子拿起筷子 划边划边1 117 2 2 3 34 5 6 7 8 9 10 11 12 13 144 5 1 1 2 3 4 5 6 2 8 9 32 刷 油加料划边儿等待 等待 抵住丸子向下按丸子放回筷子放回筷子 等待伸手 拿起油缸从右手接油缸移到模具上方 拿起油刷 持住油缸从油缸中蘸取油料 在丸子上方抖动 从油缸中蘸取油料 在丸子上方抖动 放回油刷 接过油缸 放回拿起筷子 接起一支筷子持住筷子 向上微调丸子 将丸子向下按保持放回筷子放回筷子等待等待伸手15 16 1718 19 2021 22 23 24 1 3 6 7 2 8 910 1 3114 10 45 11112 2 6 13 5添油翻动翻 转拿起油缸从右手接油缺移到模具上方拿起油刷 等待从油缸中蘸取油料 在丸子上方抖动 从油缸中蘸取油料 在丸子上方抖动 放回油刷 接过油缸 放回拿起筷子 接起一支筷子 等待等待抵住丸子 向上挑动 等待 等待放回筷子 取盒子挑起丸子 移动到盒子上方 放入盒内左手右手26 27 28 2930 31 32 3334354 12 135 614 7 14615 7 8 8 16 17325添 油翻动装盒8 35 17 14 3 1 86改善后左手 右手 827 19 10 96 01打开原料盒子伸手 拿勺子 拿刷子 搅拌移动到模具 在模具上擦动 等待 伸手接勺子移动到勺子下方 将原料加入模具 移动到勺子下方 将原料加入模具 移动到勺子下方将原料加入模具1 1 1 1 22 2 2 13 345 63 4 5 6移动到勺子下方 将原料加入模具移动到勺子下方 将原料加入模具 移动到勺子下方将原料加入模具 放回盘子 放回勺子 伸手伸手 从右手拿起一支筷子拿起筷子 划边 划边 加热 加热 抵住丸子向下按丸子加热伸手拿油缸伸手移动到模具上方从油缸中拿起油刷 持有油缸从油缸中蘸取油料 在丸子上方抖动 从油缸中蘸取油料 在丸子上方抖动放回油缸 放回油刷 拿起筷子 接起一支筷子持住筷子 向上微调丸子 将丸子向下按保持放回筷子放回筷子加热加热9 7 8 9 10 11 12 14 15 16 1718 19 4 5 6 7 8 1 23 4 7 8 10 11 13 12 13 14 15 163 4 5 6 1 2 34 5伸手拿油缸伸手移动到模具上方从油缸中拿起油刷 持有油缸从油缸中蘸取油料 在丸子上方抖动 从油缸中蘸取油料 在丸子上方抖动放回油缸 放回油刷 加热加热抵住丸子 向上挑动加热加热放回筷子取盒子挑起丸子 移动到盒子上方放入盒内背景 目的 对象 方法 现状分析 优化过程 优化结果 成果 感想结论背景:目的:此次调查的目的有两个一是对二食堂负一楼的章鱼小丸子的制作过程进行优化 二是希望通过实践加深平日对工业工程的 对象:20 21 22 23 2425 26 10 279 5 617 18 19 7 8 67 8 9方法:由于此次调查中,章鱼小丸子的制作主要涉及作业者的双手,所以我们主要采用了双手作业分析来研究。
双手作业分析报告实验

建筑大学基础工业工程实验报告一、实验目的1.熟练掌握双手操作分析符号,学会双手操作图的绘制方法,并能用双手操作图记录操作现状,找出新的改进方案;2.学会正确描述、设计和改进工作地布置;3.学会正确划分最小操作单元;4.学会分析双手操作图所记录的现状,并能找出新的改进方案。
二、实验仪器、设备及材料计算机、投影仪、S195油泵、螺丝刀、尖嘴钳、料盒、录像资料等三、实验原理1.双手操作分析的意义与作用双手操作分析是对由一名操作者所承担的要素作业(操作)进行记录和分析的技术。
通过双手操作分析可以考察操作者的操作方法和步骤是否合理;左右手的分工是否恰当;是否存在多余和笨拙的动作而需要改进;工作地物料的摆放、工作地布置是否合理等等。
通过研究和改进达到减轻劳动强度、提高作业效率的目的。
双手操作分析的作用,可以归纳为以下几点:(1)研究双手的动作及其平衡问题;(2)发掘“独臂”式操作并改进;(3)现伸手、找寻以及笨拙而无效的动作;(4)现工具、物料、设备等不合适的放置位置;2.双手操作分析图的画法绘制双手操作分析图应注意以下几点:(1)必须深入生产现场,观察全部操作,了解情况,确定操作周程及起点和终点。
(2)图前,首先填写有关资料。
比如工作名称、操作人员、研究人员等。
(3)画出工作场所的平面布置图。
(4)正式画图时,要边观察、边记录,一次观察一只手的动作。
通常先记录右手,将其动作用适当的符号及文字说明记录在右边,并反复补充、核对、改正,不要遗漏。
再以同样的程序纪录左手的动作,记录在左边。
左右手的同时动作应画在同一水平位置,并多次核对两只手的动作,使记录准确无误。
(5)最后将左右手的动作分别进行统计,并记录在操作图的下方或者右下方。
四.实验步骤及实验数据现行方法:作业:分析S195油泵的装配过程开始:双手空闲,零件在桌子上▎▎▎▎结束:装配好油泵放在桌子上零件工具箱操作者右手至泵体拿起泵体带柱塞套至泵体带泵体至柱塞套安装○2 1 持住至平垫圈 3拿起平垫圈○3至定位螺钉 4安装○4拿起柱塞套定位螺钉○5至泵体 5 3 带泵体至定位螺钉插入泵体○6 2 持住至螺丝刀 6拿起螺丝刀○7带螺丝刀至泵体7安装定位螺钉○8放下螺丝刀○9○2放下泵体至柱塞弹簧至弹簧下座拿起柱塞弹簧○10 ○3拿起弹簧下座带柱塞弹簧至泵体带弹簧下座至泵体安装柱塞弹簧○11 持住至柱塞11 ○4安装弹簧下座拿起柱塞 6 至柱塞挡板带柱塞至泵体拿起柱塞挡板安装柱塞7 带柱塞挡板至泵体至推杆体安装柱塞挡板拿起推杆体8 至泵体带推杆体至泵体拿起泵体安装 4 持住至定位栓拿起定位栓带定位栓至泵体带泵体至定位栓安装安装至出油阀紧座○9放下泵体拿起出油阀紧座○18 ○10 至出油阀紧座螺帽带至油阀紧座螺帽○11 拿起油阀紧座螺帽安装○19 持住至出油阀弹簧拿起出油阀弹簧○20带出油阀弹簧至泵体带出油阀部件至泵体安装○21 6 持住至出油阀○12 安装出油阀部件拿起出油阀○22 11 至出油阀底座带其至出油阀底座○13 拿起出油阀底座安装7 持住至出油阀垫片拿起出油阀垫片带其至出油阀紧座安装○25至泵体拿起泵体○26 12持住○14 安装至进油嘴组件拿起进油嘴组件带泵体至进油嘴组件带进油嘴组件至泵体持住○15 安装检查□1□1检查放下组装好的泵体○27 1 等待现行方法左手右手27 1526 142 70 11 156 38改进方法:作业:分析S195油泵的装配过程开始:双手空闲,零件在桌子上结束:装配好油泵放在桌子上插入泵体○6 4 带螺丝刀至泵体○5安装定位螺钉至柱塞弹簧 6 ○6放下螺丝刀4 至弹簧下座拿起柱塞弹簧拿起弹簧下座带柱塞弹簧至泵体 5 带弹簧下座至泵体安装柱塞弹簧持住至柱塞8 安装弹簧下座拿起柱塞 6 至柱塞挡板带柱塞至泵体9 拿起柱塞挡板安装柱塞7 带柱塞挡板至泵体至推杆体安装柱塞挡板拿起推杆体8 至泵体带推杆体至泵体拿起泵体安装 4 持住至定位栓拿起定位栓○13带定位栓至泵体9 带泵体至定位栓安装○14 ○12 安装至出油阀紧座○13 放下泵体拿起出油阀紧座○15 ○14 至出油阀紧座螺帽带至油阀紧座螺帽○15 拿起油阀紧座螺帽安装○16 持住至出油阀弹簧拿起出油阀弹簧○17带出油阀弹簧至泵体带出油阀部件至泵体安装持住至出油阀安装出油阀部件拿起出油阀11 至出油阀底座带其至出油阀底座拿起出油阀底座安装○20 7 持住至出油阀垫片拿起出油阀垫片○21带其至出油阀紧座安装○22至泵体拿起泵体○23 12持住○18 安装至进油嘴组件拿起进油嘴组件带泵体至进油嘴组件带进油嘴组件至泵体持住○19 安装检查□1□1检查放下组装好的泵体○24 1 等待改进方法左手右手241926 142 70 11 153 42改进过程:结合“5W1H”提问技术和“ECRS”分析原则按下列容进行考查、分析,从而改进操作过程,提高工作效率。
双手操作分析

南京工程学院实验报告课程名称基础工业工程实验项目名称双手操作分析学生实验班级工业工程132 实验学生姓名黄正雯实验学生学号 201131436 实验时间 2015年11月04日实验地点工程实践中心2-212 同组成员顾文慧实验成绩评定指导教师签字王云霞2015年11月04日一.实验目的1.掌握双手操作分析图的绘制方法。
2.学会对双手操作图所记录的现状进行分析,并能找出问题的所在,提出改善方案。
二.实验原理1、双手作业分析的含义生产现场的某些作业以工序的操作过程为研究对象,详细观察和记录其过程,重点是了解双手如何进行实际的操作,称为双手作业分析。
2、双手作业分析的特征(1)双手作业分析的主要对象是作业者的双手。
(2)双手作业分析是借助于双手作业图进行分析。
(3)双手作业分析简单明了,随时随地都可记录分析,清楚地反映出动作是否符合动作经济原则。
3、双手作业分析的作用(1)研究双手的动作及其平衡,左、右手分工是否恰到好处。
(2)发掘“独臂”式的作业。
(3)发现伸手、找寻以及笨拙而无效的动作。
(4)发现工具物料、设备等不合适的放置位置。
(5)使动作规范化,,并据此拟定作业规程,为编制标准化作业指导书提供参考。
4、双手作业分析图的作用双手作业分析图以双手操作为对象,采用标准流程图符号来记录其动作,表示其关系,并可指导作业者如何有效地运用双手,从事生产性的工作,提供一种新的动作观念,找出一种新的改善途径。
5、双手作业分析图的画法参考课本P65图2-10。
(1)图的左上部。
填写常规项目,包括编号、作业名称、地点、作业人员、作业的起点、终点(结束)、日期等。
(2)图的右上部。
填写工作地布置平面简图,并表明各种零件、工具、设备的位置。
(3)图的中间部分。
分别在左右两边填写左、右手动作的代表符号及动作说明。
(4)图的右下方。
对左、右手的动作进行统计。
6、绘制双手作业分析图时的注意事项。
(1)开始记录前,要对整个作业周期认真研究若干次。
双手协调实验实验报告
双手协调实验实验报告题目:双手协调实验实验报告一、引言双手协调是指通过两只手的配合,实现一定动作的精确、协调和高效进行。
在日常生活和工作中,许多任务需要我们运用双手进行协调操作。
为了更好地理解双手协调的机制和变化规律,我们进行了一项双手协调实验。
本实验通过测量和分析参与者在不同条件下完成任务的数据,以期对双手协调能力进行评估和研究,从而促进对双手协调的理解和应用。
二、实验目的本实验旨在通过测量参与者在不同条件下进行双手协调任务的表现,研究双手协调的能力和特点,并探讨相关的影响因素。
具体目的如下:1. 评估参与者的双手协调能力。
2. 分析不同条件(如任务难度、左右手优势等)对双手协调的影响。
3. 探讨双手协调能力的训练和提高措施。
三、实验设计1. 参与者本实验共招募了30名年龄在20至30岁之间的大学生作为实验参与者。
他们没有手部疾病或严重的运动功能障碍,没有进行过与双手协调相关的特殊训练。
2. 实验材料实验使用了一台计时仪器和一套双手协调任务的设备。
任务设备包括两个按钮和一个显示屏,参与者需要通过按下按钮来完成一系列指定的动作。
3. 实验过程参与者在实验室接受了实验指导后,进行了实验前的训练,熟悉任务的要求和操作方式。
然后,参与者开始正式的实验任务,在计时仪器的计时下,按照指示完成双手协调任务。
实验包括了不同难度的任务和不同手部优势的条件,每个条件下的任务需要重复进行三次,以保证数据的可靠性。
四、实验结果与数据分析通过实验记录和收集的数据,我们对参与者在不同条件下的双手协调表现进行了分析。
主要从以下几个方面进行了研究:1. 完成任务的时间我们对参与者在不同条件下完成任务的时间进行了统计和比较。
结果显示,任务难度越大,参与者完成任务所需的时间越长;而左右手的优势并没有明显影响任务完成时间的差异。
2. 动作的准确性针对参与者完成任务时的准确性进行了评估。
通过统计错误动作的次数和正确动作的次数,发现任务难度越大,错误动作的次数越多。
双手操作分析实验报告
双手操作分析实验报告1. 引言双手操作是人类日常生活中常见的行为之一,也是人机交互中重要的方式之一。
然而,对于双手操作的运动控制与协调机制仍存在很多未知之处。
通过对双手操作进行系统的实验分析,可以揭示人类双手操作的特征与规律,为开发更为智能、高效的人机交互系统提供理论支持。
本实验旨在通过对双手操作过程中手部运动的分析,研究双手操作的特征,探寻手部运动的协调机制与规律。
通过记录与分析参与者在进行双手操作任务时的手部运动数据,可以获得与双手操作有关的关键指标,进而揭示出双手操作的规律与特征。
2. 实验设计与方法2.1 实验设计本实验采用了单组设计,共招募了20位健康成年人作为参与者,他们都没有进行过类似的实验,且无手部运动障碍或慢性疾病。
在实验过程中,参与者需完成一系列双手操作任务,包括抓取、放置、旋转等动作。
实验过程中,使用光学运动捕捉系统以及压力传感器等设备记录与分析参与者的手部运动数据。
2.2 实验方法实验分为四个步骤:参与者指导、实验任务说明、实验过程记录与数据分析。
在参与者指导过程中,研究人员向参与者解释了实验的目的与流程,介绍了相关设备的使用方法,并明确了实验过程中的安全注意事项。
在实验任务说明过程中,研究人员向参与者详细说明了每个实验任务的具体操作方法,包括动作的要求、时间限制等。
在实验过程记录中,研究人员使用光学运动捕捉系统跟踪记录参与者手部的运动轨迹,并通过压力传感器检测手部的压力变化。
同时,将记录的数据进行整理、存档,并标注相应的任务与时间。
在数据分析部分,研究人员使用统计学方法对记录的数据进行分析,计算关键指标,如动作时间、压力变化等,并进行可视化展示。
3. 实验结果与讨论3.1 实验结果通过对实验数据的分析,我们得到了关于双手操作的一些重要结果。
首先,我们发现在不同的双手操作任务中,参与者对于手部运动的控制方式存在差异。
部分参与者更倾向于使用左手进行支撑,右手进行操作,而另一部分参与者则更倾向于双手协同操作。
双手调节实验报告
一、实验目的1. 了解双手调节实验的基本原理和方法。
2. 掌握双手调节实验的操作步骤和注意事项。
3. 通过实验验证双手调节的效果,分析双手调节的优缺点。
二、实验原理双手调节实验是一种心理学实验,通过比较单手和双手调节时的反应时间,来研究双手协调能力和工作效率。
实验原理基于以下假设:1. 双手协调调节可以缩短反应时间,提高工作效率。
2. 单手调节时,反应时间较长,工作效率较低。
三、实验材料1. 实验台:用于放置实验设备。
2. 实验设备:包括计时器、按键、鼠标等。
3. 实验被试:若干名身体健康、无视觉障碍的志愿者。
四、实验步骤1. 实验准备:将被试随机分为两组,每组人数相等。
一组为单手调节组,另一组为双手调节组。
2. 实验操作:(1)单手调节组:要求被试使用一只手操作实验设备,完成指定的任务。
计时器开始计时,被试完成操作后,计时器停止计时。
(2)双手调节组:要求被试同时使用双手操作实验设备,完成指定的任务。
计时器开始计时,被试完成操作后,计时器停止计时。
3. 数据收集:记录每组被试的反应时间,计算平均值。
4. 数据分析:比较单手调节组和双手调节组的反应时间,分析双手调节的效果。
五、实验结果与分析1. 实验结果:(1)单手调节组反应时间平均为8.5秒。
(2)双手调节组反应时间平均为6.2秒。
2. 分析:通过比较两组实验结果,可以看出双手调节组的反应时间明显短于单手调节组。
这说明双手协调调节可以提高工作效率,缩短反应时间。
六、实验结论1. 双手调节实验结果表明,双手协调调节可以提高工作效率,缩短反应时间。
2. 双手调节实验为实际工作中的应用提供了理论依据。
七、实验不足与展望1. 实验过程中,被试数量较少,可能存在一定的偶然性。
在今后的研究中,应扩大被试数量,提高实验结果的可靠性。
2. 实验仅考虑了反应时间这一指标,未考虑其他因素对工作效率的影响。
在今后的研究中,可结合其他指标,如准确率、疲劳程度等,对双手调节进行更全面的分析。
双手作业分析

阿姨
布置图
改进方法 带盘至传送带 左手 2 2 4 右手 2 2 4
放盘
现行的双手操作记录
工作:将餐盘放上洗碗机传送带 开始:双手空闲,餐盘在台上 结束:餐盘放上传送带 操作者:阿姨
阿姨 餐盘 右手 至盘 拿盘
传送带
左手
等待
至盘 拿盘 带盘至传送带 放盘 手回到原处
布置图
现行方法 等待右手拿盘 左手 2 3 1 6 右手 1 1 1 3
分析改善
• 分析:由于以前的餐盘摆放位置和阿姨的位置,导致阿姨 只能用右手先从一叠餐盘中拿起一个餐盘后再和右手合作 一起放入传送带中,这样就导致了左手的等待,导致双手 作业不合理,增加了阿姨的疲劳程度。
• 改善:通过改变阿姨的位置和餐盘的摆放,可以使阿姨方 便的用双手同时拿起一个餐盘,双手同时将餐盘放入传送 带中,减少了等待,提高了效率。
改善后的双手操作分析图
工作:将餐盘放上洗碗机传送带 开始:双手空闲,餐盘在台上 结束:餐盘放上传送带 操作者:阿姨
餐盘
右手 至盘 拿盘
传送带Βιβλιοθήκη 左手 至盘 拿盘 带盘至传送带 放盘
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
“章鱼小丸子”作业分析研究报告——章鱼小丸子工作组指导教师:***专业:工业工程学生:王琰杰20112731常俊杰20112698谢谦20112704魏孟2011269重庆大学双手作业分析研究报告院(系):机械工程学院专业:_工业工程学生姓名:__ 王琰杰常俊杰谢谦___魏孟 ____研究地点:_重庆大学第二食堂章鱼小丸子窗口报告题目:_关于章鱼小丸子制作的双手作业的研究报告_报告日期: 2012 年12 月28 日指导教师:__温沛涵_指导教师评语:成绩(五级记分制):______ _______双手作业分析研究报告一、研究背景:课程改革不断更新,教师的教学理念更新,教学行为的更新,对学生的自我观察能力等综合素质能力有了更高的要求。
通过对整本书的全面系统的学习,我们对工业工程的专业知识的也有了一定的掌握。
为了加强知识的运用,我们决定在生活中发现工业工程专业的痕迹。
通过一段时间的观察,小组成员以敏锐的眼光发现章鱼小丸子的制作过程跟我们所学专业知识作业分析中的双手作业分析知识有紧密的联系。
通过视频的录制以及对制作人员的咨询,我们掌握了章鱼小丸子的制作过程,本着理论运用于实践的原则,我们通过专业知识的学习,对章鱼小丸子的制作进行了双手作业分析,在分析过程中采用5W1H以及ECRS等方法,遵循动作经济原则,提出了几种不同的优化改善方案,以缩短作业实践,减少工作人员的疲惫程度,以及获取最大利益为目的。
通过几种方案的比较,我们从几种备选方案中选择出了最优方案。
二、研究目的:1.学会绘制双手作业分析图;2.学会对双手作业图所记录的现状进行分析;3.学会提出可行的优化改善方案;4.通过实践加强对平日所学专业知识的运用。
三、使用仪器,材料:照相机,摄像机,章鱼小丸子专用漏斗,改进后的叉子。
四、研究过程在选定了研究课题之后,我们和制作章鱼小丸子的操作者进行了沟通,向其解释了我们的来意,并向她咨询了关于章鱼小丸子制作过程中的一些问题。
在征得她的同意后,我们对其制作过程进行了录像,操作者也进行了了积极的配合。
录像完成后,我们小组对录像进行了反复的观看,力求从中发现尽可能多的问题,进行尽可能多的可行的改善。
在对章鱼小丸子的制作过程的录像进行了反复的观看之后,我们发现,章鱼小丸子的制作过程中,操作者主要是使用双手进行作业,作业主要集中在双手;在作业过程中,不存在工位的变化和操作者的走动。
于是,联系到我们所学习的理论知识,我们小组决定用所学习的双手作业分析法对章鱼小丸子的制作过程进行研究分析和改善。
我们小组对章鱼小丸子的制作过程的录像进行反复观看之后,绘制了“章鱼小丸子制作过程双手作业分析图”。
通过对章鱼小丸子制作过程的录像反复观察,并参考双手作业分析图,我们发现,在章鱼小丸子的制作过程中存在以下问题:1,无效、笨拙的动作过多;2,左手等待时间过长;3,左右手分工不合理,左手动作明显少于右手动作;4,物料摆放位置不合理,增加了动作幅度,浪费了时间。
在发现了这些问题之后,我们利用“5W1H”、“ECRS”等方法,并遵循“动作经济原则”对这些问题进行了分析。
通过分析我们发现,在这些存在的问题中,最主要的问题是物料摆放位置的不合理。
通过观察我们发现,在章鱼小丸子制作工作台上,所有的物料基本都摆放在章鱼机的右侧(见图一),导致了左手使用的工具或物料需要右手的传递,从而增加了右手的动作数目,增加了左手的等待时间,降低了工作效率,也造成了左右手分工的不平衡,是操作者的操作舒适度降低,更易疲劳。
正是因为物料摆放位置的不合理,导致操作者在作业过程中一系列问题,所以,我们主要针对物料摆放位置进行了改善。
同时,我们还利用“ECRS”方法,并遵循“动作经济原则”,对一些不必要的无效而笨拙的动作进行了取消,合并等改进。
绘制了新的“物料摆放位置图”(见图二)和改善后的“章鱼小丸子制作过程双手作业分析图”(见第页图四)。
图一五、研究对象及工具研究对象:章鱼小丸子制作流程中双手作业情况、章鱼小丸子工作台物料摆放位置研究工具:双手作业分析图、“5W1H”、“ECRS”、“动作经济原则”。
六、绘制章鱼小丸子的制作过程的双手作业分析图通过对章鱼小丸子制作过程的录像的反复观察研究,我们绘制了“章鱼小丸子制作过程双手作业分析图”。
1.现行方案工作:章鱼小丸子的制作开始:双手空闲,原料在台上结束:装好六只放在盒中左手右手等待伸手拿刷子移动到模具上在模具上擦动放回刷子打开原料盖子图二1112233刷油伸手拿勺子拿盘子搅拌将原料加入模具将原料加入模具将原料加入模具将原料加入模具将原料加入模具将原料加入模具等待放回勺子放回盘子合上盖子伸手伸手从右手拿起一支筷子拿起筷子划边划边等待等待抵住丸子向下按丸子放回筷子放回筷子等待伸手拿起油缸拿起油刷持住油缸在丸子上方抖动在丸子上方抖动放回油刷接过油缸放回拿起筷子接起一支筷子持住筷子向上微调丸子放回筷子放回筷子等待等待伸手 拿起油缸 拿起油刷等待在丸子上方抖动 在丸子上方抖动 放回油刷 接过油缸 放回拿起筷子 接起一支筷子 等待等待抵住丸子 向上挑动 等待 等待放回筷子 取盒子挑起丸子 移动到盒子上方 放入盒内2. 改进方案伸手拿勺子 拿刷子 搅拌移动到模具 在模具上擦动 等待 伸手接勺子将原料加入模具 将原料加入模具 将原料加入模具 将原料加入模具 将原料加入模具 将原料加入模具1 1 22 2 2 13 3 7 34567 8放回盘子放回勺子 伸手伸手 拿起筷子 划边 划边 加热 加热 抵住丸子向下按丸子 加热伸手拿油缸伸手持有油缸放回油缸 拿起筷子 接起一支筷子持住筷子放回筷子放回筷子加热加热伸手拿油缸伸手持有油缸9 56 7 8 11 12 13 14 15 16 17 4 5 6 1 2 4 5放回油缸 加热加热抵住丸子 向上挑动加热加热放回筷子 取盒子挑起丸子 移动到盒子上方放入盒内22 23 2526 10 9 5 18 197 7 8 9七、分析评价现行方案和改进方案在现行方案中,由于物料摆放位置的不合理,造成了左右手分工的不合理,左手等待时间过长,而且,无效和笨拙的动作过多,从而造成了时间的浪费,工作效率低下。
从双手动作分析图中可以清楚的看出,在一次作业循环中(制作6个章鱼小丸子),左手共有36次动作,其中,8次加工,17次移动,3次储存,8次等待;右手共有56次动作,其中35次加工,14次移动,1次储存,6次等待;左手动作比右手多出20个,而且左右手都存在过多的等待时间,效率低下。
针对以上问题,我们利用“5W1H”、“ECRS”、“动作经济原则”进行分析和改善。
我们首先用“5W1H”进行分析原因,发现主要原因是物料摆放位置不合理,于是我们根据“动作三要素”中的物料摆放位置位置,根据“动作经济原则”中的“减少动作数”、“双手同时进行动作”、“缩短动作距离”和“轻松动作”原则,对物料摆放的位置进行了改善。
然后,又根据“ECRS”原则,对其中一些笨拙、无效的动作进行和“取消”、“合并”等改善。
在改善后,在一次作业循环中(制作6个章鱼小丸子),左手共有36个动作,其中8次加工动作,19次移动动作,9次储存动作,0次等待动作;右手共有44次动作,其中,27次加工动作,10次移动动作,6次储存动作,1次等待动作;大大提高了工作效率,右手动作从比左手动作多出20次减少到多出8次,左右手分工较为合理。
从改善前后的结果对比中,可以清晰的看出,通过改善,左右手分工较改善前的情况更为合理,同时,左手从36次动作中存在8次等待,减少到36次动作中存在0次等待动作;左手效率较改善前有了大幅度的提高。
右手动作从56次减少到44次,效率也有了较大幅度的提高。
所以,总体来说,这次课题改善大幅度提高了操作者的工作效率,使总的工作时间减少,操作者作业也更为轻松,这次改善效果明显。
八、结论通过对改善前后双手作业分析的结果进行对比,我们很容易看到运用基础工业工程课程中所学的知识,对现实生活中的一些案例进行改进的良好作用。
通过这次改善,我们取消了一些章鱼小丸子制作过程中不必要的等待时间、平衡了双手的作业强度、优化了一些笨拙的动作,不仅提高了制作章鱼小丸子的效率,而且减轻了正与小丸子制作者的工作强度,在一定程度上对章鱼小丸子的制作流程进行了很好的优化。
更重要的是,通过这次课题作业:1 、把课本上所学的理论知识,应用于现实生活中,使我们更好地理解课本知识。
2 、使我们认识到了工业工程在现实生活中的巨大应用和巨大的前景,对工业工程专业有了更深一步的了解。
3 、有助于我们培养优化意识,使我们知道了生活中的任何事物都是可以改善的;并且在改善方案中,没有最好,只有更好,我们应该大胆培养自己的创新意识,勇于创新,善于创新。
4 、这次课题作业采用团队合作的方式进行小组作业,培养了我们的团队合作意识和团队协作能力;在这段时间的合作中,也加深了我们之间的友谊。
这次课题作业过程中,虽然我们也曾出现过各种问题,但是我们都一一克服了,并且在锻炼了我们处理问题的能力的同时,也看到了使我们认识到了自己的不足。
相信通过这次的锻炼,我们会更好的了解认识工业工程专业;并在以后的学习中,会更加的努力!。