机械原理第3章作业 PPT
合集下载
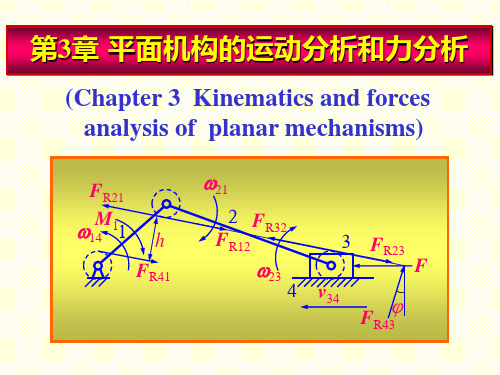
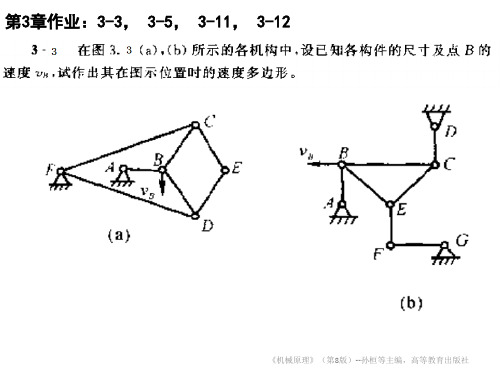
机械原理第三章 运动分析
例3-4 含三副构件的六杆机构运动分析
例3-5 已知图示机构各构件的尺寸及原动件1的角速度1,求 C点的速度vc及构件2和构件3的角速度2及 3;求E点的速度 vE 加速度aE 。 解: 1) 列矢量方程,分析 各矢量大小和方向。 2) 定比例尺,作矢量 图。 3) 量取图示尺寸,求 解未知量。 2 C
vB 3 vB 2 vB 3B 2
⊥BC ⊥AB ? lAB1
v ?
m/s mm
1
A
1
B
2
方向: 大小: 定比例尺 作矢量图.
∥BC
?
3 C 4
vB3B 2 v b2b3
p b3 b2
vB 3 v pb3 3 lBC lBC
顺时针方向
2) 求构件3的角加速度3 列方程:
机械原理 第三章 平面机构的运动分析
§3-1 概述
§3-2 速度瞬心及其在平面机构速度分析中的应用 §3-3 平面机构运动分析的矢量方程图解法 §3-4 平面机构运动分析的复数矢量法 §3-5 平面机构运动分析的杆组法
§3-1 概述
1.机构运动分析的内容 机构尺寸和原动件运动规律已知时,求转动构件上某点 或移动构件的位移、速度、加速度及转动构件的角位移、 角速度、角加速度。 2.机构运动分析的目的
绝对速度相等的重合点。用Pij表示。
若该点绝对速度为零——绝对瞬心。 若该点绝对速度不为零——相对瞬心。 二、瞬心的数目 设N 为组成机构的构件数(含机架),K为瞬心数,则
2 K CN =N ( N 1) / 2
三、瞬心的位置 1.两构件组成转动副 P12
1 2
以转动副相联,瞬心在其中心处。
P12、P13 的位置(绝对瞬心),P23
机械原理第三章优秀课件 (2)

机械原理课件第三章
§3-2 用速度瞬心法作机构的速度分析
一、速度瞬心及其位置的确定 1、速度瞬心的定义
A
vA2A1 B
若构件2相对固定的构件1运动,可求得 瞬心P12,有:
vB1B2
P12
பைடு நூலகம்
2
v v
P1
P2
0,
vP2P1 vP2 vP1 0
1
vP1 vP2 0,但 vP2P1 vP2 vP1 0
vCvP24 2P 1P 224 L
P12
1
vC
P13
C P34
4
利用瞬心P13---构件1和3的等速重合点。
P14
构件1为机架,则vP13=0, P13为构件3的瞬时转动中心,则有
3
vC P34P13L
vD3D1P3L
§3-3 矢量方程图解法(相对运动图解法)
一、同一构件上两点间的速度和加速度
2
且为绝对瞬心。
若构件1不固定,
P12
则P12为相对瞬心。
1
§3-2 用速度瞬心法作机构的速度分析
2、瞬心数目
若机构中有N个构件,则: ∵每两个构件就有一个瞬心 ∴根据排列组合,瞬心有 :
K N(N1) 2
P13
1 23
P12 P23
构件数 4 瞬心数 6
56
8
10 15 28
§3-2 用速度瞬心法作机构的速度分析
③另外2个用三心定理求出。
P13
P12 P23
1 2 3 P14 P34
PP2244
3 P23
P23 2
1
P13
“下标同号消去 P12 P23 法P”13在P12 P23的连线上。
§3-2 用速度瞬心法作机构的速度分析
一、速度瞬心及其位置的确定 1、速度瞬心的定义
A
vA2A1 B
若构件2相对固定的构件1运动,可求得 瞬心P12,有:
vB1B2
P12
பைடு நூலகம்
2
v v
P1
P2
0,
vP2P1 vP2 vP1 0
1
vP1 vP2 0,但 vP2P1 vP2 vP1 0
vCvP24 2P 1P 224 L
P12
1
vC
P13
C P34
4
利用瞬心P13---构件1和3的等速重合点。
P14
构件1为机架,则vP13=0, P13为构件3的瞬时转动中心,则有
3
vC P34P13L
vD3D1P3L
§3-3 矢量方程图解法(相对运动图解法)
一、同一构件上两点间的速度和加速度
2
且为绝对瞬心。
若构件1不固定,
P12
则P12为相对瞬心。
1
§3-2 用速度瞬心法作机构的速度分析
2、瞬心数目
若机构中有N个构件,则: ∵每两个构件就有一个瞬心 ∴根据排列组合,瞬心有 :
K N(N1) 2
P13
1 23
P12 P23
构件数 4 瞬心数 6
56
8
10 15 28
§3-2 用速度瞬心法作机构的速度分析
③另外2个用三心定理求出。
P13
P12 P23
1 2 3 P14 P34
PP2244
3 P23
P23 2
1
P13
“下标同号消去 P12 P23 法P”13在P12 P23的连线上。
机械原理-第3章 平面机构的运动分析和力分析
a
大小:2w1×vB2B1=2w1vB2B1sin90°=2w1vB2B1; k B 2 B1 方向:将vB2B1的方向沿w1转过90°。
vB1B2 1
2 B
(B1B2)
vB1B2 1
2 B
(B1B2)
ω1
a
k B 2 B1
ω1
a
k B 2 B1
(3)注意事项
B (B1B2)
1
2
vB1 = vB2,aB1 = aB2,
目的: 了解现有机构的运动性能,为受力 分析奠定基础。 方法:1)瞬心法(求速度和角速度); 2)矢量方程图解法; 3)解析法(上机计算)。
3.1
速度瞬心
(Instant center of velocity )
3.1.1 速度瞬心
两个互作平行平面运动的构件 定义:
上绝对速度相等、相对速度为
零的瞬时重合点称为这两个构 件的速度瞬心, 简称瞬心。瞬 心用符号Pij表示。
图(b) 2
(B1B2B3)
扩大刚体(扩大构件3),看B点。
B 1 A
b2
C
vB3 = vB2 + vB3B2
方向:⊥BD ⊥AB 大小: ? lAB w1 ∥CD ?
3
w1
D
4
p
选 v ,找 p 点 。
v
v B 3 pb3 μv ω3 (逆 ) l BD l BD
b3
(b)
例4:已知机构位臵、尺寸,w1为常数,求w2、a2。
C B
n t n t aC aC a B aCB aCB
2
1
E
方向:C→D ⊥CD B→A C→B ⊥CB 大小:lCD w32 ? lABw12 lCB w22 ?
机械原理第三章
1 . (角)位移分析
写成复向量形式:
l1 l2 l4 l3
l1 cos 1 l2 cos 2 l3 cos 3 l4 0 l1 sin 1 l2 sin 2 l3 sin 3 0
A A2 B 2 C 2 ) 消去2后得: 3 2arctg ( B C
第四节
平面连杆机构的运动分析
l2 C
l3 3 D 4 l4 3 x
二、用解析法对平面连杆机构进行运动分析
(一)铰链四杆机构 已知:各杆长 l , l , l
求:
2 , 3 , 2 , 3 , 2 , 3 .
1
2
3
, l4及 ,
1
y 1 A
i 3
1
2 B l1 1 1
2
图 图 图 图
• 机构具有运动的连续性:当主动件连续运 动时,从动件也能连续地占据预定的各个 位置。 图
二、平面四杆机构的传力特性 1、压力角和传动角 图 压力角a:从动件所受的力与力作用点的速度方向 之间所夹的锐角。 传动角 g:压力角的余角。可以直接从图中量出。 a愈小, g 愈大,对传动愈有利。
g 设计时限制最小传动角: min 40 g min
最小传动角 g min的位置:
(一般) 50 (高速、重载)
(1)曲柄摇杆机构:曲柄与机架共线。
图
1)当主动件与机架重叠共线时
b 2 c 2 (d a) 2 g arccos 2bc
2)当主动件与机架拉直共线时:
b 2 c 2 (d a) 2 g 180 arccos 2bc
一、速度分析的瞬心法及其应用
1、速度瞬心的概念和类型
机械设计基础课件 第三章 平面机构自由度的计算
1个约束,2个自由度
5.自由度:构件的独立运动(参数) 平面运动 X,Y,α 约束:对独立运动所加的限制
实长(m) μl= 图长(mm)
机构:
(1)机架:某一构件相对固定(只有一个) (2)原动件:机构中按给定的运动规律独立运动的构件 (3)从动件:确定运动
机构的运动简图:机构用一些简单的线条和规定的符号表达,该图形具有确定的比例
第三章 平面机构的自由度计算
1.机械中每一种独立的运动单元体称为一个构件
2.凡使两个构件直接接触而又能有一定的相对运动的连接称为运动副
3.构成运动副时,两个构件上参与接触的部分(点,线或者面)称为运动副的元素
4.低副:两构件组成面接触的运动副(回转副和移动副)
2个约束,1个自由度
高副:两构件组成点或线接触的运动副
第一章 绪论
机械:机器和机构 机器:(1)构件的组合体
(2)各构件之间有确定的相对运动 (3)用来变换或传递能量,物料与信息,以减轻人做的有用功 机构:具有机器的前两个特点,传递运动和力的装置
构件和零件 构件:运动的最小单元 零件:加工的最小单元
机器是由若干机构组成 机构是由若干构件组成 机构由一个或若干个零件组成
F≤0 机构不能动 F﹥0 机构可以动
F﹥原动件数,运动不确定 F=原动件数,运动确定 F﹤原动件数,不能动
三角形构件的三个自由度均不受限制
轮系 第九章 轮系 行星轮系
只会遇见这种小滚子的局部自由度 焊死处理
虚约束特别容易被漏掉
第二条后面有一个例题 这个比较不容易被看出来
无非就是判断机构能不能动,原动件数目几个,是否合适, 拿到题之后,第一步先看,有没有复合铰链,局部自由度,虚约束
复 复
机械原理 第03章 连杆机构

平面四杆机构具有急回特性的条件: (1)原动件作等速整周转动;
(2)输出件作往复运动;
(3)
0
B2
2.曲柄滑块机构中,原动件AB以 1等速转动 B 2 b B 1 C2 C3 a b 2 1 1 1 a B1 C2 C 3 C1 B1 H A
A
C1
4
4
H
B2
偏置曲柄滑块机构
对心曲柄滑块机构 H=2a, 0 ,无急回特性。
一.平面四杆机构的功能及应用
1 .刚体导引功能 2.函数生成功能 3.轨迹生成功能 轨迹生成功能 是指连杆上某点通过某一 预先给定轨迹 的功能。 连杆
§2-4 平面四杆机构运动设计的基本问题与方法
一.平面四杆机构的功能及应用
1 .刚体导引功能 3.轨迹生成功能 2.函数生成功能 4.综合功能 O1 D1 上剪刀 D2 下剪刀
(b>c) (2b)
'
B
1
a
A
b
c
d
4
D r 3
C b 3 c
a-d
B2
r2
d c a b (2a )
d b a c (2b')
由(1)及(2a' )(2b')可得
d+a
d a , d b, d c
铰链四杆机构的类型与尺寸之间的关系:
在铰链四杆机构中: (1)如果最短杆与最长杆的长度之和小于或等于其它两杆 长度之和 ——满足杆长和条件 且: 1 以最短杆的相邻构件为机架,则此机构为以最短杆 为曲柄的曲柄摇杆机构; 2 以最短杆为机架,则此机构为双曲柄机构;
2 4
摆动导杆 机构
导杆:
C 3
机械原理第3版课件第三章

v
生无限值惯性力,并由此对凸轮产
生冲击
a
+∞
—— 刚性冲击
-∞
s = c0 c1 v = ds dt = c1 回程运动方程: a = dv dt = 0
边界条件
运动始点:=0, s=h 运动终点: = ,s=0
s = h (1 ) h v = ω a = 0 Nhomakorabeaf
从动件在运动起始、中点 和终止点存在柔性冲击 适用于中速轻载场合
f
O
f/2
4h2/f2
c)五次多项式运动规律 表达式为
v = ds / dt = C1 2C2 3C3 2 4C4 3 5C5 4 a = dv / dt = 2C2 2 6C3 2 12C4 2 2 20C5 2 3 s = C0 C1 C2 2 C3 3 C4 4 C5 5
推程边界条件
在始点处:=0, s1=0, v1=0, a1=0; 在终点处: = Φ s2=h, v2=0, a2=0; 解得待定系数为
C0=0,C1=0,C2=0,C3=10h/Φ 3,C4=-15/ Φ4,C5=6h/ Φ5
位移方程式为
S=10hφ 3/ Φ3-15hφ4/Φ4+6hφ5/Φ5
第二节
凸轮机构基本运动参数设计
一、凸轮工作转角的确定
二、从动件运动规律设计
一、凸轮工作转角的确定
s
*从动件在远停处对应 的转角s——远停角。
h
0
0
120º
s
180º
300º
360º
120º
机械原理第3章作业题及答案
解:1、选取比例尺, l 0.001m/mm,作出该位置的机构运动简图。
2、速度分析 依次计算B、C2、D、E各点的速度,建立速度分析矢量分析方程。
1) vB l AB1 0.0310 0.3m / s
2) 计算 vC2 vC2
大小 方向 ? ?
选取比例尺,v 0.005m/s/mm ,作出速度多边形。
4
c2
1
p' (a' , c3 ' )
k'
2 a 0.05m/s /mm
C(C2 , C3 )
E
e
d
c2 '
e' d' b'
b
3)运用速度影像原理,可求的D点和E的速度
n2 '
BD 50 BD bd bc 2 49.1 19.94 mm , bd BC 123 .1 BC bc2 vD v pd 0.005 45.2 0.226m / s, 方向是由p d DE 40 DE de de bd 19.94 16 mm , BD 50 BD bd vE v pe 0.005 34.5 0.173m / s, 方向是由p e
P24
P 14
P34
《机械原理》(第8版)--孙桓等主编,高等教育出版社
P24在AB连线上的无穷远处
P 12
13 P
P23
vE
P 13 P34
P23
P 12
P24
P 14
vE
1
P 14
P34
《机械原理》(第8版)--孙桓等主编,高等教育出版社
3-12
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
动画演示
注 意:
θ18 k 0118 1 0 .1 216. 36
k1
1 .1 2
必须按题目要求的初始位置设计。
设计结果:曲柄长23.8mm,连杆长58.3mm。
3-6 如图,设计一铰链四杆机 构作为加热炉炉门的启闭机构。 已知炉门上两活动铰链的中心 距为50mm,炉门打开后成水 平位置时,要求炉门温度较低 的一面朝上(如虚线所示), 设固定铰链安装在y-y轴线上, 其相关尺寸如图所示,求此铰 链四杆机构其余三杆的长度。
以D点为圆心,DC1为半径作圆弧,与前述直线交于C2。 参照题5-2,列式计算或作图得出曲柄和摇杆的长度。
设计结果:lAB=38.65mm,lBC=98.2mm。 注意:若C1D顺时针画弧,所得交点C2不可用。
N 2、铰链四杆机构中,若存在曲柄,其曲柄一定 是最短杆。 N 3、曲柄滑块机构一定具有急回运动性质。 N
4、在曲柄摇杆机构中,当曲柄为原动件时,该机
构出现死点位置。 N
5、在四杆机构中,取最长杆作为机架,则可得
到双摇杆机构。 N
Y
6、行程速比系数K大于1,说明机构有急回特性。
三、问答题 1、什么是速度瞬心? 2、什么是三心定理? 3、简述杆组法的基本思路和基本方法?
设计结果:AB=67.3mm, AD=95.8mm,DC=112.1mm。
3-7 欲设计一个如下图所示的铰链四杆机构。设已知其摇 杆CD的长度为75mm,行程速比系数K=1.5,机架AD的长度为 80mm,又知摇杆的一个极限位置与机架间的夹角ψ=45°, 试求其曲柄AB的长度和连杆BC的长度。
解:
解: θ1 8 k 0 11 8 1 0 .1 4 30源自k 11 .1 4
导杆机构的极位夹角θ与导杆摆 角ψ相等。
取任一点D,作∠mDn=ψ,再 作角等分线,在角等分线上取 lDA=100,求得曲柄转动中心A。
由A点对极限位置的导杆作垂线, 求得曲柄长度AC=25.88mm。
也可直接用sin(ψ/2)=AC/l4得出结果。
从图上量出长度尺寸并按作图比例系数换算成实际长度: P12A=28.54,则:P12C=28.54+80=108.54 因为P12是构件1与构件2的瞬心,所以:
1P12A2P12C
2P 11 P 1 C 2A 211 0 2 0 .5.5 8 8 4 42.63ra/sd
3-2 试根据图中注明的尺寸判断下列铰链四杆机构是曲柄 摇杆机构、双曲柄机构、还是双摇杆机构。
θ1 8 k 0 11 8 1 0 .1 5 36
k 1
1 .1 5
任取D点,作水平线DA,使lDA=80, 过D点,作直线DC1,长 度为lDC=75,位置为与 DA成45°。 过AC1两点的直线为连杆 与曲柄共线的位置之一。 过A点,作一直线与AC1成 θ=36°,此直线为连杆与曲柄 共线的位置之二。
3-4 如下图,设计一脚踏轧棉机的曲柄摇杆机构。要求踏
板CD在水平位置上下各摆10°,且lCD=500mm, lAD=1000mm,试用图解法求曲柄AB和连杆BC的长度。
解:根据已知条件画出A、D、C、C1、C2。 画出两个极限位置AC1、AC2。 由图可知, AC1=BC-AB,AC2=BC+AB, 即:AB=(AC2-AC1)/2 可由图上直接量取AC1、AC2长度 后按上式算出连杆和曲柄的长度。
4、转动副成为整转副是条件是什么?如何判 断机构是否存在曲柄? 5、什么是机构的急回运动特性?
6、什么是运动的连续性? 7、什么是压力角?压力角与传动角是什么关系? 8、如何确定机构是否存在死点位置?可采用哪 些措施避免死点位置的存在?
9、在曲柄摇杆机构中,极位夹角是指哪个角度?
四、作业详解
3-1 在图示凸轮机构中,已知r = 50mm,lOA=22mm,
解: 先画出炉门开闭时的两个极限位置B1C1和B2C2。 连接B1B2成一直线,并作B1B2
的中垂线n,与y-y轴线交于A点, 得出铰链A的位置。
连接C1C2成一直线,并作C1C2 的中垂线m,与y-y轴线交于D点, A 得出铰链D的位置。
画出四杆机构AB1C1D,量出 题目要求的三杆长度尺寸。
D
5、工程上常用 行程速比系数K 表示机构的急回
性质,其大小可由计算式 K(180 )/1(80 )求
出。
6、曲柄摇杆机构中,最小传动角出现的位置是 曲柄与机架两次共线的位置 。
7、曲柄摇杆机构可演化成偏心轮机构,其演化 途径为 扩大转动副 。
二、判断题
1、曲柄摇杆机构的行程速比系数K不可能等于1。
也可用作图法得到两杆长度。以A 为圆心,AC1为半径画圆弧与AC2 交于E点,以A为圆心,EC2为直径 作出的圆为曲柄圆,即得到曲柄长 度,由此再得到连杆长度。。
设计结果:AB=78mm,BC=1115mm 。
注意比 例换算
3-5 如图,设计一曲柄滑块机构。已知滑块的行程s=50mm, 偏距e=16mm,行程速比系数K=1.2,求曲柄与连杆长度。
a) 双曲柄机构:符合杆长之和条件,且最短杆为机架。 b) 曲柄摇杆机构:符合杆长之和条件,机架为最短杆的任一相邻杆。 c) 双摇杆机构:不符合杆长之和条件。 d) 双摇杆机构:符合杆长之和条件,但最短杆对面的构件为机架。
大家有疑问的,可以询问和交流
可以互相讨论下,但要小声点
9
3-3 设计一导杆机构。已知机架长度l4=100mm,行程速比 系数K=1.4,求曲柄长度。
lAC=80mm, 1 90 ,凸轮1的等角速度ω1=10rad/s,
逆时针方向转动。试用瞬心法求从动件2的角速度ω2。
解:先观察得出瞬心P13和P23 再用瞬心法瞬心P12
根,据三心定理,P12应在
1
P13与P23的连线上,
根据瞬心法,P12应在过B
点垂直于构件2的直线上。
P12
P13
P23
两线的交点即为P12
第3章 连 杆 机 构
一、填空题 1、在四杆机构中,取与 最短杆 相对的杆为机 架,则可得到双摇杆机构。
2、平面连杆机构具有急回特征在于 极位夹角 不为零。
3、在曲柄摇杆机构中,只有在 摇杆为主动件的 情况下,才会现现死点位置 。在死点位置,机 构会出现 从动曲柄不能转动 现象。
4、判断平面连杆机构的传动性能时,机构的传 动角γ越大,则传动性能越 好 。