渐开线少齿差行星齿轮减速器设计零齿差输出机构毕业论文
少齿差行星齿轮减速器毕业设计文献综述
本科毕业设计(论文)文献综述院(系):机电工程学院专业:机械设计制造及其自动化班级:机械设计制造及其自动化姓名:学号:201 年月日本科生毕业设计(论文)文献综述评价表少齿差行星齿轮减速器的设计文献综述1 少齿差行星齿轮减速器的特点随着现代工业的高速发展,机械化和自动化水平的不断提高,各工业部门需要大量的减速器,并要求减速器体积小,重量轻,传动比范围大,效率高,承载能力大,运转可靠以及寿命长等。
减速器的种类虽然很多,但普通的圆柱齿轮减速器的体积大,结构笨重;普通的蜗轮减速器在大的传动比时,效率较低;摆线针轮行星减速器虽能满足以上提出的要求,但成本较高,需要专用设备制造;而渐开线少齿差行星减速器不但基本上能满足以上提出的要求,并可用通用刀具在插齿机上加工,因而成本较低。
能适应特种条件下的工作,在国防,冶金,矿山,化工,纺织,食品,轻工,仪表制造,起重运输以及建筑工程等工业部门中取得广泛的应用。
渐开线少齿差行星减速器具有以下优点:1.结构紧凑、体积小、重量轻由于采用内啮合行星传动,所以结构紧凑;当传动比相等时,与同功率的普通圆柱齿轮减速器相比,体积和重量均可减少三分之一至三分之二;2.传动比范围大 N型一级减速器的传动比为10~100以上;二级串联的减速器,传动比可达一万以上;三级串联的减速器,传动比可达百万以上。
NN 型一级减速器的传动比为100~1000以上;3.效率高 N型一级减速器的传动比为10~100时,效率为80~94%;NN 型当传动比为10~200时,效率为70~93%.效率随着传动比的增加而降低。
4.运转平稳、噪音小、承载能力大由于式内啮合传动,两啮合齿轮一位凹齿,一为凸齿,两齿的曲率中心在同一方向。
曲率半径接近相等,因此接触面积大,使轮齿的接触强度大为提高,又采用短齿制,轮齿的弯曲强度也提高了。
此外,少齿差传动时,不是一对轮齿啮合,而是3~9对轮齿同时接触受力,所以运转平稳,噪音小,并且在相同模数的情况下,其传递力矩臂普通圆周齿轮减速器大。
全自动洗衣机减速离合器文献综述
毕业设计(论文)文献综述洗衣机减速离合器综述1 引言随着洗衣机质量不断提高和居民购买能力的增强,洗衣机行业迎来了成熟期之后市场需求的提升,人们在注重产品品质和价格的同时,对产品外观和功能的要求也越来越高,目前,国内大部分洗衣机的外观都相差不大,只有中外合资企业LG、三星、松下、惠而浦、东芝、夏普等的外观较为独特。
近年来,许多新技术和新工艺应用于洗衣机上,例如:离心原理应用、无离合器技术、波轮与内桶一体化技术、无孔内桶技术等等[1]。
2 国内外现状2.1国外少齿差行星齿轮传动的研究德国人最早提出摆线针轮行星齿轮传动原理,三十年代后期日本开始研制生产这种传动,由于当时工艺条件落后,齿形2ha-精度很低,因而产量不高,直到六十年代摆线磨庆的出现,从工艺上保证了摆线齿形的精度,才促进了这种传动的发展,摆线针轮传动是少齿差传动中应用最广泛、最基本的一种类型,在此基础上还发展了二齿差传动,复合齿形、行星轴承与偏心套合并等新结构。
摆线针轮传动承载能力高,运转平稳,效率高,寿命长。
但加工精度要求高,结构复杂。
后来的渐开线少齿差传动,其原理与摆线少齿差基本相同,主要区别在于其内外齿轮的齿廓曲线,轮齿结构简单、啮合接触应力小,承载能力高,可以采用软齿面,加工也容易得多。
虽然苏联学者在1949年从理论上解决了实现一齿差传动的几何计算问题,但直到六十年代以后,随着电子计算机的普及运用,渐开线少齿差传动才得到了较专迅速的发展。
目前有柱销式、零齿差、十字滑块、浮动盘等多种形式。
在六十年代,国外就开始探讨圆弧少齿差传动,到七十年中期,日本已开始乾地圆弧少齿差行星减速器的系列化生产。
这种传动的特点在于行星轮的齿廓曲线凹圆弧代替了摆线,轮齿与针齿在啮合点的曲率方向相同,形成两凹凸圆弧的内啮合,从而提高了轮齿的接触强度和啮合效率,其针齿不带齿套,并采用半埋齿结构,既提高了变曲强度又简化了针齿结构[2]。
近几十年来,又相继出现了一些新的少齿差传动形式,其中发展较快的有活齿少齿差传动、锥齿少齿差传动、双曲柄输入式少齿差传动以及利用弹性变形来传递运动的谐波传动。
毕业设计(论文)-行星轮系减速器设计[管理资料]
![毕业设计(论文)-行星轮系减速器设计[管理资料]](https://img.taocdn.com/s3/m/5371fe25b9f3f90f77c61b64.png)
第一章概述行星轮系减速器较普通齿轮减速器具有体积小、重量轻、效率高及传递功率范围大等优点,逐渐获得广泛应用。
同时它的缺点是:材料优质、结构复杂、制造精度要求较高、安装较困难些、设计计算也较一般减速器复杂。
但随着人们对行星传动技术进一步的深入地了解和掌握以及对国外行星传动技术的引进和消化吸收,从而使其传动结构和均载方式都不断完善,同时生产工艺水平也不断提高,完全可以制造出较好的行星齿轮传动减速器。
根据负载情况进行一般的齿轮强度、几何尺寸的设计计算,然后要进行传动比条件、同心条件、装配条件、相邻条件的设计计算,由于采用的是多个行星轮传动,还必须进行均载机构及浮动量的设计计算。
行星齿轮传动根据基本够件的组成情况可分为:2K—H、3K、及K—H—V三种。
若按各对齿轮的啮合方式,又可分为:NGW型、NN型、WW型、WGW型、NGWN型和N型等。
我所设计的行星齿轮是2K—H行星传动NGW型。
第二章原始数据及系统组成框图(一)有关原始数据课题: 一种自动洗衣机行星轮系减速器的设计原始数据及工作条件:使用地点:自动洗衣机减速离合器内部减速装置;传动比:p i=输入转速:n=2600r/min输入功率:P=150w行星轮个数:n=3w内齿圈齿数z=63b(二)系统组成框图洗涤:A 制动,B 放开,运动经电机、带传动、中心齿轮、行星轮、行星架、波轮脱水:A 放开,B 制动,运动经电机、带传动、内齿圈(脱水桶)、中心齿轮、行星架、波轮与脱水桶等速旋转。
自动洗衣机的工作原理:见图第三章减速器简介减速器是一种动力传达机构,利用齿轮的速度转换器,将马达的回转数减速到所要的回转数,并得到较大转矩的机构。
减速器降速同时提高输出扭矩,扭矩输出比例按电机输出乘减速比,但要注意不能超出减速器额定扭矩。
降速同时降低了负载的惯量,惯量的减少为减速比的平方。
一般的减速器有斜齿轮减速器(包括平行轴斜齿轮减速器、蜗轮减速器、锥齿轮减速器等等)、行星齿轮减速器、摆线针轮减速器、蜗轮蜗杆减速器、行星摩擦式机械无级变速机等等。
小模数渐开线少齿差减速器的设计及其传动特性研究

Candidate: Supervisor: Academic Degree Applied for: Specialty: Affiliation: Date of Defence: Degree-ConferringInstitution:
Liu Dan Prof. Tang Dewei Master of Engineering Mechanical Design and Theory School of Mechatronics Engineering July, 2012 Harbin Institute of T文
Abstract
With China's increasing emphasis on the space industry,the highly integrated spacecraft has become one of the important direction of development of space technology. Harmonic reducer is the most widely used in the aerospace field, but in the special space environment stiffness is low due to its flexible wheel, in view of the advantages of high transmission ratio, large output torque, high stiffness of the small tooth difference reducer,the thesis puts forwards the design and transmission characteristic research of fine-pitch involute small tooth difference reducer. Factors that impact meshing quality indicators are analyzed,and attributed to the discussion of the pressure angle. A general algorithm is devised for solving optimization of small tooth difference reducer driving parameters by genetic algorithm, optimal design is divided into two sections to discuss: multi-objective optimization of volumereducer bearing capacity coefficient and optimization of meshing angle. Meshing interference criterions of small tooth difference gear pair are discussed,and the mathematical model which takes minimum pressure angle as optimization objective、meets the requirement of tooth-overlapping interference and coincidence degree as constraints is established.Meanwhile,the lifespan,durability and the quality of the processsed gear and so forth of the gear shaper cutter is decided by the parameter selection.In order to obtain better cutting property, the thesis establishes a mathematical model aims at the optimization of maximum regrinding depth,which lays the foundation for parameter optimal design of the shaper cutter. Based on above two models,an optimal design method using MATLAB Genetic Algorithm Optimization Toolbox is proposed,which solves the pressure angle optimization and the parameter optimization of internal gear shaper cutter,thereby optimal parameters of the gear shaper cutter is obtained,which satisfy every constraint. A practical example of fine-pitch involute small tooth difference reducer is designed according to design requirements,and the mechanical structure and size parameters are determined. The strength of reducer output mechanism is checked, and the efficiency and backlash is calculated.The thesis discusses the phenomenon of multitooth meshing, establishes a multi-tooth meshing load distribution model of small tooth difference transmission and calculates the simutaneous meshing tooth number.Finally, finite element model of small tooth difference gear pair is established,which is analysed by software of ANSYS. By simulation analysis,we obtain the simutaneous meshing tooth number and stress nephogram of the gear pair,which verifies the result of theoretical calculation. And then, modal analysis of the reducer is carried out, low frequency and vibration of tower structure is obtained which verifies the rationality of design of reducer box. Keywords:Fine-pitch; Reducer with small tooth difference;Optimal design; Multi-tooth - II -
少齿差行星齿轮减速器的设计本科毕业设计

本科毕业设计(论文)少齿差行星齿轮减速器的设计毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日指导教师评阅书评阅教师评阅书教研室(或答辩小组)及教学系意见摘要对少齿差行星齿轮减速器国内外的发展现状、优缺点、结构型式和其传动原理进行了一定的阐述。
在设计过程当中,对内啮合传动产生的各种干涉进行了详细验算;从如何提高转臂轴承的寿命为出发点,来计算选择减速器齿轮的模数,进行少齿差内齿轮副的设计计算,最终合理设计减速器的整体结构。
渐开线少齿差行星传动设计要点

渐开线少齿差行星传动设计要点作者中国七砂陆在潮摘要:本文介绍了渐开线少齿差行星传动的设计特点,给出了简化设计的条件和计算公式。
提出了在实际设计制造过程中可取的窍门和特别注意的关键点。
关键词:渐开线,少齿差,行星传动,设计,窍门The main points to design a planetary drivewith fewer differential involute gear teethAbstract:In this thesis,the characteristics to design a planetary drive with fewerdifferen-tial involute gear teeth have been introduced,and also show you the conditions& theformulas for the simplified design calculation.Furthermore,the knowhows and the keystrongpoints which should be kept in the process of practical design andmanufacturehave been put forward.Key word:Involute,fewer differential tooth,planetary drive,design,knowhow.渐开线少齿差行星减速器,是一种新型减速器。
其优点是结构紧凑,体积小、重量轻、传动比大、传动效率高、制造维修方便。
因此,应用越来越广。
但是由于其传动行式是内啮合行星齿轮传动,所以又产生了设计复杂,使不少希望自行设计制造者望而却步,严重影响普及应用。
前些年我厂自行设计制造了一台内齿轮输出的NN型(原称2N—N)少齿差行星减速器捲筒。
投入运行后效果很好。
浅谈渐开线少齿差行星齿轮传动的特点及发展前景

图 E
图 F
图 3 轴销输 出机构和浮动盘式结构
而 浮动 盘 式 结 构 较 简 单 , 图 3的 F图 , 用 如 采
传动 , 但浮 动盘本 身加 工要 求较 高 , 且其工 作效 率 而
和承载 能力 还缺乏 测 试数据 。
一
传 递平行 轴运 动 的浮动盘 机构 作为输 出机 构 。它 比
而齿数 不 同的两个 内齿 轮副组 成 。其 结构 如 图 2的 C图所示 , 由两 个 中心 轮 ( 内齿 轮 ) 即 和一个 行 星架
啮合齿 轮 副 。H 是 输 入轴 , 是 输 出轴 。 当 电动机 V 带动偏 心轴 转动 时 , 行星 齿轮 与 内齿 轮啮合 , 由于 内 齿轮 2固定 不动 , 迫使双 联行 星轮既绕 内齿 轮公转 ,
・
2 ・ 4
a" 用 F
汽
车
21 第 1 0 1年 期
★ 设 计 ・ 验 ・ 究 ★ 试 研
又绕 自身 中心 自传 , 带动 内齿轮 4输 出运 动 , 而达 从 到传 动 的 目的 。有 时 , 型 行 星 传 动 也 可设 计 成 NN 外 齿轮输 出的结构 形式 , 图 2的 D 图 。 如
W
图A 图 1 N型 少 齿 差行 星齿 轮 传 动
图B
1 2 NN型 少齿 差行星 齿轮传 动 .
( 即偏心 轴 ) 成两级 行星 传动 。 由其 中的齿 轮 1 组 及
3为双联 外齿轮 , 1与 2 3与 4分别 为两对少 齿差 内 ,
N 型行 星齿 轮传 动 可 以实 现 大 传 动 比传 动 , N 是一种 典型 的行 星齿 轮 传 动形 式 , 般 由模 数 相 同 一
渐开线少齿差行星齿轮传动
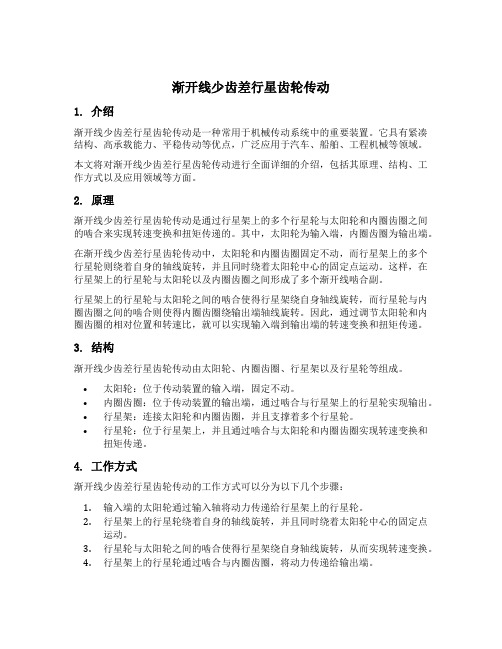
渐开线少齿差行星齿轮传动1. 介绍渐开线少齿差行星齿轮传动是一种常用于机械传动系统中的重要装置。
它具有紧凑结构、高承载能力、平稳传动等优点,广泛应用于汽车、船舶、工程机械等领域。
本文将对渐开线少齿差行星齿轮传动进行全面详细的介绍,包括其原理、结构、工作方式以及应用领域等方面。
2. 原理渐开线少齿差行星齿轮传动是通过行星架上的多个行星轮与太阳轮和内圈齿圈之间的啮合来实现转速变换和扭矩传递的。
其中,太阳轮为输入端,内圈齿圈为输出端。
在渐开线少齿差行星齿轮传动中,太阳轮和内圈齿圈固定不动,而行星架上的多个行星轮则绕着自身的轴线旋转,并且同时绕着太阳轮中心的固定点运动。
这样,在行星架上的行星轮与太阳轮以及内圈齿圈之间形成了多个渐开线啮合副。
行星架上的行星轮与太阳轮之间的啮合使得行星架绕自身轴线旋转,而行星轮与内圈齿圈之间的啮合则使得内圈齿圈绕输出端轴线旋转。
因此,通过调节太阳轮和内圈齿圈的相对位置和转速比,就可以实现输入端到输出端的转速变换和扭矩传递。
3. 结构渐开线少齿差行星齿轮传动由太阳轮、内圈齿圈、行星架以及行星轮等组成。
•太阳轮:位于传动装置的输入端,固定不动。
•内圈齿圈:位于传动装置的输出端,通过啮合与行星架上的行星轮实现输出。
•行星架:连接太阳轮和内圈齿圈,并且支撑着多个行星轮。
•行星轮:位于行星架上,并且通过啮合与太阳轮和内圈齿圈实现转速变换和扭矩传递。
4. 工作方式渐开线少齿差行星齿轮传动的工作方式可以分为以下几个步骤:1.输入端的太阳轮通过输入轴将动力传递给行星架上的行星轮。
2.行星架上的行星轮绕着自身的轴线旋转,并且同时绕着太阳轮中心的固定点运动。
3.行星轮与太阳轮之间的啮合使得行星架绕自身轴线旋转,从而实现转速变换。
4.行星架上的行星轮通过啮合与内圈齿圈,将动力传递给输出端。
由于渐开线少齿差行星齿轮传动采用了多个渐开线啮合副,因此可以实现平稳传动和较大扭矩输出。
5. 应用领域渐开线少齿差行星齿轮传动由于其紧凑结构、高承载能力和平稳传动等优点,在许多领域得到了广泛应用,包括但不限于以下几个方面:•汽车工业:用于汽车变速器、前后桥等部件中,实现转速变换和扭矩传递。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
渐开线少齿差行星齿轮减速器的设计(零齿差输出机构)摘要在条件为输入转速为1450转/分钟、输入功率为5KW、传动比为25等这些技术参数的基础上设计一渐开线少齿差行星齿轮减速器。
渐开线行星齿轮减速器传动与普通定轴减速器传动相比具有承载能力大、体积小、效率高、重量轻、传动比大、噪声小、可靠性高、寿命长、便于维修等优点,同时还可以提高其承载能力。
本设计最主要的过程就是少齿差和零齿差设计参数的选取与计算,特别是变位系数的选取,需通过Matlab 软件编程计算,这样很大程度上节省了因选取的变位系数不当而需重新计算所需要的时间。
还可以多次给定初值选取最佳的变位系数,从而有利于少齿差和零齿差的结构设计。
同时还需对轴类零件、端盖、箱体的结构设计,装配时,需要对轴承、密封圈、挡圈、键进行选用。
关键词:减速器行星齿轮优化设计Involute few tooth difference planet gear reduction geardesign(zero tooth difference output element)AbstractThe planet gear reduction gear with few-tooth difference transmission and the ordinary dead axle reduction gear transmission compares has the bearing capacity in a big way, the volume small, the efficiency high, the weight light, the velocity ratio big, the noise small, the reliability high, the life long, is advantageous for merits and so on service, meanwhile may sharpen its bearing capacity.This design process most main is the few tooth difference and the zero tooth difference design variable selection and the calculation, specially dislodges the coefficient the selection, must through the Matlab software programming computation, save like this to a great extent because of the dislodgement coefficient which selected not when had the recomputation to need time. It also may many times assign the starting value selection best dislodgement coefficient, thus is advantageous to the few tooth difference and the zero tooth difference structural design.When simultaneously also needs the countershaft class components, the end cover, the body structural design, the assembly, needs to the bearing, the seal packing collar, the elastic ring, the key to carry on selects.Key word: The reduction gearplanet gear optimizes the design目录第一章概述51.1 发展概况51.2 发展方向51.3 传动特点61.4 设计目的6第二章齿差传动62.1 少齿差传动原理62.2 少齿差传动的结构类型82.2.1按输出机构型式分82.2.2按减速器的级数分82.2.3按安装型式分82.3 2K-H型传动装置92.4 传动比计算92.5 少齿差传动的特点和应用92.6 少齿差传动的设计顺序102.7 少齿差传动的各个限制条件112.7.1 齿廓不重迭干涉112.7.2 啮合角112.7.3 重合度112.7.4 变位系数122.8 少齿差齿轮副的几何计算12第三章零齿差传动163.1 零齿差传动原理163.2 零齿差传动的主要参数163.2.1 变位系数与中心距173.2.2 啮合齿面的诱导法曲率183.2.3 重迭系数183.2.4 齿面滑动系数193.2.5 啮合效率203.3 主要几何限制条件213.3.2 齿顶具有一定的厚度213.3.3 验算径向间隙213.3.4 差齿刀齿数要适当213.4 零齿差齿轮副的设计步骤223.5零齿差齿轮副的几何计算22第四章其他元件的选择264.1 键的选择264.2 齿轮的材料与其选择原则274.2.1 选用的齿轮材料:钢274.2.2 选择原则274.3 滚动轴承的选择284.4 轴的设计304.5 密封件34参考文献35致36第一章概述机械设计制造与其自动化专业是为了培养从事机械设计、制造行业的人才而开设的专业。
而工业机械手课程设计不仅培养设计者对机械的认识、运用能力,而且也增进了对机械工业发展的了解和认知。
1.1 发展概况我国早在南北朝时代,祖冲之发明了有行星齿轮的差动式指南车。
因此我国行星齿轮传动的应用是非常早的。
1880年德国第一个行星齿轮传动装置的专利出现了。
19世纪以来,随着机械工业特别是汽车和飞机工业的发展,对行星齿轮传动的发展有很大影响。
1920年首次成批制造出行星齿轮传动装置,并首先用作汽车的差速器。
二次大战后,高速大功率船舰、航空发动机与工程机械的发展,促进行星齿轮传动的发展。
高速大功率行星齿轮传动广泛的实习应用,于1951年首先在德国获得成功。
1958年后,英、意、日、美、、瑞士等国亦获得成功,均有系列产品,并已成批生产,普遍应用。
1.2 发展方向世界各先进工业国,经由工业化、信息化时代,正在进入知识化时代,行星齿轮传动在设计上日益完善,制造技术不断进步,使行星齿轮传动已达到了较高水平。
我国与世界先进水平虽存在明显差距,但随着改革开放带来设备引进、技术引进,在消化吸收国外先进技术方面取得长足的进步。
目前行星齿轮传动正向以下几个方向发展:1)向高速大功率与低速大转距的方向发展。
2)向无级变速行星齿轮传动发展。
3)向复合式行星齿轮传动发展。
4)向少齿差行星齿轮传动方向发展。
5)制造技术的发展方向。
1.3 传动特点1)体积小、重量轻、结构紧凑,传动功率大、承载能力高2)传动比大3)传动效率高4)运动平稳、抗冲击和振动的能力较强1.4 设计目的:1、培养机械设计能力;2、扩展知识结构;3、帮助培养综合运用能力;4、是课堂教学的有益补充本课题从少齿差行星齿轮着手,首先选择计算了与设计少齿差行星齿轮有关的主要参数,经过验算后符合条件,在根据中心距进行零齿差的设计计算,同时也要验证选用的参数的合理性。
整体机构设计完后,装配时,需要对键、轴承、密封圈等进行选用,装配后减速器能正常地进行工作。
第二章齿差传动2.1 少齿差传动原理渐开线少齿差行星齿轮传动,简称少齿差传动,如图所示。
行星齿轮1位外齿轮,中心齿轮为齿轮2,他们之间的齿数差通常为1-4个。
这种少齿差行星齿轮传动用于减速时,是以系杆H为主动件。
由于行星轮相对中心轮有偏心,故在传动时,行星轮1不仅要作公转而且要做自传。
因此,就需要一个能够传递两平行轴之间旋转运动的联轴器,即称偏心输出机构V,以便把行星轮的自传输送出来。
由于这种行星轮系,是由一个中心齿轮K,一个系杆H和一个偏心输出机构V所构成的,故简称K-H-V型行星机构。
假如齿轮K 与机壳固定不动,当电动机带动系杆H 转动时,系杆将迫使装于偏心轴上的行星齿轮绕齿轮中心作公转运动。
同时,行星齿轮绕偏心轴中心作反向低速自传运动。
利用偏心输出机构将行星轮的自传运动传递给输出轴,就可以达到减速的目的。
在设计少齿差行星齿轮减速器时,如果齿轮齿数2z 不变,行星齿轮齿数1z 越大,两者之间的齿数差12z z z p -=越小,则传动比越大。
但是,当齿轮副的齿数差p z 小到一定程度时,将会发生不在啮合位置的齿廓相互重迭现象。
为了使齿轮副在少齿差时仍然能够正确啮合顺利运转,可以从两条途径消除齿廓重迭干涉:一是降低齿顶高的选用短齿,从齿高方向消除齿廓重迭,一是选择适当的正变位系数,减少外齿轮的 齿顶厚度,增大齿轮的齿槽宽度,从齿厚方向消除齿廓重迭。
在加工变位齿轮时齿轮滚刀的位置要在径向移动一些距离,用模数的倍数xm 来表示,x 称为变位系数。
变位系数取代数值,当齿条刀具相对于加工标准齿轮的位置远离齿轮坯中心时,称为正变位,反之,称为负变位。
变位齿轮与标准齿轮相比,它的齿厚,齿高和公法线长度等都有变化。
变位齿轮副与标准齿轮副相比,它的中心距和啮合角也都有变化。
2.2 少齿差传动的结构类型渐开线少齿差行星齿轮传动型式较多,主要有K-H-V型传动装置,双啮合2K-H 型正号机构传动装置,以与三啮合和锥齿型传动装置。
K-H-V型传动装置2.2.1按输出机构型式分(1)齿圈固定,低速轴输出1)有三销轴式输出,应用广泛,效率较高,但销孔加工精度要求较高。
它种型式:悬臂销轴式输出,销轴固定端与输出轴紧配合,悬臂端相应地插入行星轮的端面销孔,结构简单,但,销轴受力不均。
2)十字滑块式输出,结构型式简单,加工方便,但承载能力与效率均较销轴式输出低,常用于小功率场合。
3)浮动盘式输出,结构型式新颖,加工较方便,使用效果较好。
4)零齿差式输出,其特点是通过一对零齿差齿轮副将行星轮的低速反向转动传递给输出轴,零齿差系指齿轮副的外齿轮齿数一样,像齿轮联轴器那样,但、外齿轮的齿间间隙较大,其结构型式较简单,制造不困难,较适用于中心距较小的一齿差传动。
(2)输出轴固定,齿圈输出1)齿圈与机壳一起输出,W机构的销轴固定不动,行星轮只作平动,不作转动,迫使齿圈与卷筒一起输出,这是常见的卷扬机的结构型式。
2)双曲柄式,双曲柄机构不是W输出机构,它不仅替代了行星架H,并使W机构省掉,可获得较大的传动比,运转平稳性有所提高,但轴向尺寸加大。
(3)波纹管机构2.2.2按减速器的级数分(1)单级减速器(2)双级减速器2.2.3按安装型式分(1)卧室安装(2) 立式安装2.3 2K-H 型传动装置2K-H 型传动装置由两对啮合齿轮副组成,共同完成减速与输出任务。