船舶课程设计 静力学 胡丽芬讲解
船舶静力学
船舶与海洋工程静力学研究的是船舶、海洋平台及其他海洋浮式结构在静水中的浮性、稳性和抗沉性等流体静力学特性。
若不考虑结构的变形,无论是船舶或海洋平台,都可作为一个浮于水面的刚体来对待。
浮体在静水中的流体静力学特性是船舶和海洋平台静力学的共性问题,也是本章所要讨论的问题。
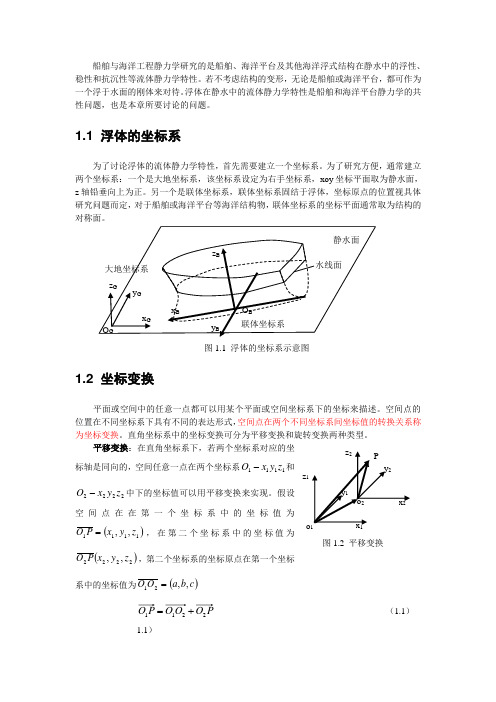
1.1 浮体的坐标系为了讨论浮体的流体静力学特性,首先需要建立一个坐标系。
为了研究方便,通常建立两个坐标系:一个是大地坐标系,该坐标系设定为右手坐标系,xoy 坐标平面取为静水面,z 轴铅垂向上为正。
另一个是联体坐标系,联体坐标系固结于浮体,坐标原点的位置视具体研究问题而定,对于船舶或海洋平台等海洋结构物,联体坐标系的坐标平面通常取为结构的对称面。
图1.1 浮体的坐标系示意图1.2 坐标变换平面或空间中的任意一点都可以用某个平面或空间坐标系下的坐标来描述。
空间点的位置在不同坐标系下具有不同的表达形式,空间点在两个不同坐标系间坐标值的转换关系称为坐标变换。
直角坐标系中的坐标变换可分为平移变换和旋转变换两种类型。
平移变换:在直角坐标系下,若两个坐标系对应的坐标轴是同向的,空间任意一点在两个坐标系1111z y x O -和2222z y x O -中下的坐标值可以用平移变换来实现。
假设空间点在在第一个坐标系中的坐标值为()1111,,z y x P O =,在第二个坐标系中的坐标值为()2222,,z y x P O ,第二个坐标系的坐标原点在第一个坐标系中的坐标值为()c b a O O ,,21=P O O O P O 2211+=(1.1)1.1)z 1x 1y 1z 2x 2y 2o 1o 2 P图1.2 平移变换展开后为:cz z b y y a x x +-+=+=212121 (7.2)旋转变换:当两个坐标系的坐标原点相同,但是对应的坐标轴不重合,则空间任意一点在两个坐标系中的坐标值可以用旋转变换来实现。
旋转变换的一般形式为:()()()()⎪⎪⎪⎭⎫ ⎝⎛⎪⎪⎪⎭⎫ ⎝⎛=⎪⎪⎪⎭⎫ ⎝⎛=⎪⎪⎪⎭⎫ ⎝⎛222332331232221131211222232221111z y x e e e e e e e e e z y x z y x e e e(7.3)上式中,)1(i e 是时坐标系1111z y x O -中第i 个坐标轴的单位列矢量,)2(j e 时坐标系2222z y x O -中第j 个坐标轴的单位矢量,()()21j i ij e e e ⋅=,在正交坐标系下,坐标转换矩阵是单位正交矩阵。
船舶静力学讲稿
绪论船舶静力学是研究船舶航海性能的科学,是船舶设计与制造专业的一门重要专业技术基础课程,本学科要求有《高等数学》、《材料力学》、《理论力学》、《流体力学》等学科作为基础,也是今后学习《船舶强度与结构规范设计》、《船舶设计原理》、《造船工艺学》等课程的基础,因此要求同学们重视这门课的学习。
本课程包括六章。
其中第六章船舶的下水计算因在造船工艺学有阐述故在船舶静力学中不加以阐述。
第二、三、四章是重点章节。
通过本课程的学习,学生应对船舶浮性、稳性、抗沉性有一个全面的了解,在船舶设计时保证船舶具有合理的浮态(船舶在静水中的平衡状态,参数有吃水d、横倾角θ以及纵倾角ψ)和足够的稳性和抗沉性,同时学生应掌握衡量船舶稳性、浮性、抗沉性各种指标及其计算方法,能在设计时提供各种必要的计算说明书和曲线等数据。
一、船舶原理的内容船舶原理是研究船舶航海性能的科学。
(1)浮性——船舶在一定的装载情况下浮于一定水面位臵的能力(保持平衡位臵能力)。
(2)稳性——船舶在外力作用下,船舶发生倾斜而不致倾覆,当外力的作用消失后,仍能回到原来的平衡位臵的能力。
(3)抗沉性——当船体破损,海水进入舱室,船舶仍能保持一定的浮性和稳性而不致沉没和倾覆的能力。
(4)船舶快速性(速航性)——船舶尽可能消耗低的功率而达到一定航速的能力,包括船舶阻力与推进两部分,前者研究船舶在航行过程所遭受的各种阻力。
后者是研究克服阻力的推进器及其与船体间的相互作用(推力减额和伴流分数)。
(5)适航性(或称耐波性)——船舶在风流情况下的运动性能,主要研究船舶的横摇(rolling)、纵摇(pithing)、升沉等习惯上称为摇荡(摇摆、振荡)(6)操纵性——包括航向稳定性和船舶机动性(航向稳定性和船舶机动性是相互制约的,对船体的要求也是相互制约的)是按照驾驶员的意图保持原定航向和改变航向的能力。
船舶原理=船舶静力学+船舶动力学船舶静力学是以流体静力学为基础,研究船舶在不同条件下的浮性、稳性、抗沉性等问题。
船舶与海洋工程-课程设计

设置
AutoCAD命令有以下种方式,任选其中一种即可: ➢1)使用工具栏的图标按钮; ➢2)使用菜单项; ➢3)在命令窗口键入AutoCAD命令; ➢4)使用对象的快捷菜单; ➢5)使用状态栏中的辅助工具按钮。
1/1
3.透明命令
透明命令是在运行某个命令的过程中,插入执行的 其他命令。例如在执行用直径做园的命令中,需要滚动 屏幕以选择当前显示区外的第二个端点。
1/1
4.用户坐标系(UCS)
1)创建用户坐标系 2)命名UCS 3)打开/关闭UCS图标显 示 4)控制UCS图标显示样式
1/6
1)创建用户坐标系
创建用户坐标系可用以下任一方法: ➢使用工具栏; ➢使用菜单项; ➢使用UCS命令:UCS↙
命令窗口提示:
指定UCS原点或[面(F)/命名(NA)/对象(OB)/上一个(P)/视图(V)/世界 (W)/X/Y/Z/z轴(ZA)]<世界>
1/3
选择船舶的用途
图名 船舶线型图 船舶静水力计算及稳性校核 船舶阻力估算 船舶螺旋桨设计 船舵设计 船舶总布置图 船舶基本结构图 *船体分段设计 船舶机舱布置图 船舶电力计算及主要设备选型
2/3
课程名称
船舶静力学
船舶阻力 船舶推进 船舶操纵与摇摆 船舶设计原理 船舶结构强度与设计 现代造船技术 船舶动力装置 船舶电气及自动化
指定第一点或[对象(O)/]: (输入2个点后学生显示:) 指定下一点或[闭合(C)/拟合公差(F)/]:<起点切向>:
对象:指定多段线段转换成样条; 闭合:将样条曲线的起点与终点闭合; 拟合公差:定义曲线的偏差值,值越大,离控制点越远; 起点切向:定义样条曲线端点切线方向。
1/1
船舶静力学
Formula
计算船舶重量W及其重心(XG,YG,ZG)位置:
n
W pi i1 n
XG pixi W i1 n
YG pi yi W i1 n
ZG pizi W i1
3/7
arrangement of weight into classes
根据研究问题的要求采用不同的船舶重量分类方法。 1) 固定重量:包括船体钢料、木作舾装、机电设备、武器等。
x g may be expressed as fractions of the length of the ship L. The abscissa x g may be positive, negative or zero; its absolute value rarely exceeds 1.5 per cent of L.
5/7
The floating conditions of a ship(6)
4. 任意状态(Arbitrary): 船浮于静水面,船体中纵剖面与铅垂面成φ(横倾角);
中横剖面与铅垂面成θ(纵倾角)。 W = △ = ω▽ xB -xG =(zG-zB) tanθ yB -yG =(zG-zB) tanφ 状态由三参数决定:平均吃水d, 横倾角φ, 纵倾角θ。
d
0 Awdz
3/7
Tons per cm Immersion
(4)每厘米吃水吨数 当船舶吃水平行于水线面增、减1cm时,引起排水量
的变化,称为每厘米吃水吨数曲线Tpc,其值随d 变化。 Tpc=ωAw / 100 (吨/厘米)
如果排水量有一小量变化p ( ≯10%Δ),则相应吃水的 变化为:
7/7
2.2 Weight of Ship and Coordinates of Center of Gravity
船舶静力学的三心

船舶静力学的三心
船舶静力学的三心指的是船舶的重心、浮心和稳心。
船舶为什么能漂浮在水上?因为水有浮力。
那么,水为什么会产生浮力?一般说来,流体(气体和液体)在重力作用下会给浸没在其中的物体一个浮力。
就好比一个受到“外敌”入侵的群体一样,这个群体会有“抵抗情绪”,不会轻易让出空间给“异类”。
虽然上面这个回答缺乏说服力,但是很形象,也提到了非常关键的因素—一重力作用。
这里,我们用一杯水来作研讨模型。
杯子里的水是水分子的集合体,水分子在重力作用下都有下降的“趋势”。
如果可能的话,可以把这杯水分成若干层。
由于重力作用,下层的水分子总是受到上层水分子的压力,力是可以传递的,所以,越到最低层水分子受到压力越大。
我们可以把“水杯模型”放大到江河湖海中去。
已经有前人研究过,水在深度h处的压强P=p g h等号两边同时乘以有效受力面积S,有PS=p g s h,PS(即压强X面积)为压力(即浮力F),Sh(即面积x高)为体积(即排水体积△),则船在水中受到浮力F=p g△。
因此,我们可以准确地来回答水为什么会产生浮力了,是因为重力作用形成的静水压力而产生浮力。
船舶静力学课程设计小结
船舶静力学课程设计小结一、教学目标本课程的学习目标主要包括知识目标、技能目标和情感态度价值观目标。
知识目标要求学生掌握船舶静力学的基本概念、原理和公式,能够分析和解决船舶静力学问题。
技能目标要求学生能够运用船舶静力学知识进行计算和设计,具备一定的实验操作能力。
情感态度价值观目标要求学生培养对船舶静力学的兴趣和热情,树立科学的世界观和价值观。
二、教学内容教学内容主要包括船舶静力学的基本概念、原理、公式及应用。
教材的章节安排如下:第一章,船舶静力学基本概念和原理;第二章,浮力原理和浮船的稳定性;第三章,船舶重量的计算和分配;第四章,船舶浮态的调整和控制;第五章,船舶静力学在实际工程中的应用。
三、教学方法本课程采用多种教学方法,如讲授法、讨论法、案例分析法和实验法等。
讲授法用于传授基本概念和原理,讨论法用于激发学生思考和探讨,案例分析法用于分析实际问题,实验法用于验证理论和提高实践能力。
通过多样化教学方法,激发学生的学习兴趣和主动性。
四、教学资源教学资源包括教材、参考书、多媒体资料和实验设备。
教材为学生提供基本的学习内容,参考书为学生提供更多的扩展知识,多媒体资料为学生提供图像和视频资料,实验设备为学生提供实践操作的机会。
教学资源的选择和准备应充分支持教学内容和教学方法的实施,丰富学生的学习体验。
五、教学评估教学评估主要通过平时表现、作业和考试等方式进行。
平时表现包括课堂参与度、提问和讨论等,占总成绩的20%。
作业包括课后习题和案例分析等,占总成绩的30%。
考试包括期中和期末考试,占总成绩的50%。
评估方式应客观、公正,能够全面反映学生的学习成果。
六、教学安排教学安排规定了教学进度、教学时间和教学地点等。
教学进度按照教材的章节进行,确保在有限的时间内完成教学任务。
教学时间安排在每周的周一和周三下午,每次课2小时。
教学地点选择在教室或实验室,根据教学内容进行调整。
七、差异化教学差异化教学根据学生的不同学习风格、兴趣和能力水平进行设计。
船舶与海洋工程-课程设计
船舶静力学基本原理

艏摇Yaw 纵摇Pitch
横摇Roll x
纵荡 Surge y
横荡Sway
吃水T: 龙骨上表面到静水面的垂向距离。
横倾角f:yoz平面内的角位移,右侧下沉为正。
纵倾角q: xoz平面内的角位移,船首下沉为正。
纵倾通常用纵倾值(艏艉的吃水差)来表示。
tanq=(TF-TA)/Lpp
常见的浮态的描述 • 正浮状态:横倾角f=0,纵倾角q=0 • 横倾状态:纵倾角q=0 • 横倾状态:横倾角f = 0 • 任意状态:
3.3 排水体积的横剖面积分
将船舶水下部分体积横向剖分:(纵倾状态)
L/2
L/2 T (x)
排水体积: = Asdx = dx 2ydz
-L / 2
-L / 2
0
浮心坐标:
横剖面面积
xB
=
1
L/2
xAsdx
-L / 2
T (x)
As = 2ydz
0
zB
=
1
L/2
zs Asdx
船舶在静水的力平衡方程为:
W = M trim = ltrim M heel = lheel
W:船体总重量; :排水量 Mtrim:纵倾力矩; Mheel:横倾力矩 ltrim:纵倾回复力臂 lheel:横倾恢复力臂
• 阿基米德原理:船舶的浮力等于船舶排开水的重量,浮力 作用点位于水下部分排水体积的形心位置。
-L / 2
=
1
L/2 T (x)
dx 2yzdz
-L / 2
0
横剖面关于 基线的静矩
T (x)
M soy= 2yzdz
0
3.4 等体积倾斜水线 ——倾角变化对浮心位置的影响
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
鲁东大学交通学院浮体静力学课程设计实验报告姓名学号班级指导教师日期成绩一 邦容曲线计算及绘制1.要求计算以下各站处的横剖面面积及面积矩曲线,并绘出邦戎曲线图。
0站,1站,2站,3站,4站,5站,6站,7站,8站,9站,10站 注:假设甲板为平甲板已知 船 型:油船 主尺度:船长89.00m, 型宽14.60m, 型深7.00m, 设计吃水 5.50m 型值表见附录1(提供电子版资料)2.计算(采用梯形法计算)横剖面面积'220d A ydz d y si δ=≈∑⎰ 式中:()'''012012i n n y y y y y y y =++++-+∑… 横剖面面积As 对基线Oy 轴的静矩 ()()111022ni i i i oyi i i y y z z M z z z ++++⎡⎤-⎛⎫=-+⎢⎥ ⎪⎝⎭⎣⎦∑ 式中 )ny y'(ny ...y y'y Σ'k n n i i i +⨯-++⨯+⨯=00021103.列表.画图横剖面面积As横剖面面积As 对基线Oy 轴的静矩Moy水线0.000 0.250 0.500 0.750 1 2 3 4 5 6 7 0站0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 1.346 5.961 13.453 1站0.000 0.352 0.812 1.370 2.016 5.414 10.142 16.408 24.725 35.255 47.412 2站0.000 1.129 2.649 4.413 6.369 15.572 26.545 38.805 52.000 65.849 80.133 3站0.000 2.211 4.855 7.750 10.816 24.016 38.125 52.588 67.168 81.768 96.368 4站0.000 3.072 6.398 9.874 13.436 27.923 42.523 57.123 71.723 86.323 100.923 5站0.000 3.191 6.593 10.125 13.727 28.283 42.883 57.483 72.083 86.683 101.283 6站0.000 3.191 6.593 10.125 13.727 28.283 42.883 57.483 72.083 86.683 101.283 7站0.000 2.996 6.296 9.748 13.284 27.709 42.301 56.901 71.501 86.101 100.701 8站0.000 2.022 4.512 7.224 10.080 22.284 35.299 48.749 62.502 76.535 90.829 9站0.000 0.691 1.683 2.848 4.137 10.029 16.721 23.881 31.533 39.947 49.411 10站 0.000 0.029 0.112 0.244 0.424 1.543 3.202 5.227 6.794 7.414 8.194 水线0.00 0.25 0.50 0.75 1 2 3 4 5 6 7 0站0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 13.460 52.688 111.810 1站0.000 0.026 0.089 0.203 0.375 14.074 30.334 58.782 106.392 175.620 265.052 2站0.000 0.086 0.294 0.644 1.155 38.946 74.082 125.314 193.224 277.920 379.084 3站0.000 0.156 0.505 1.067 1.851 57.319 100.417 158.657 231.657 319.257 421.457 4站0.000 0.202 0.630 1.291 2.190 64.238 108.038 166.438 239.438 327.038 429.238 5站0.000 0.207 0.643 1.314 2.221 64.734 108.534 166.934 239.934 327.534 429.734 6站0.000 0.207 0.643 1.314 2.221 64.734 108.534 166.934 239.934 327.534 429.734 7站0.000 0.200 0.625 1.282 2.174 63.948 107.748 166.148 239.148 326.748 428.948 8站0.000 0 .147 0.476 1.000 1.729 53.150 93.008 147.464 216.924 301.968 402.866 9站0.000 0.056 0.193 0.424 0.760 24.989 45.887 75.303 115.053 168.321 238.671 10站 0.000 0.004 0.017 0.047 0.097 4.412 10.07618.724 23.584 25.192 34.2361234567891邦戎曲线A s =f (z )M o y =f (z)二 静水力曲线计算与绘制1.要求计算各吃水处的以下各要素,并绘出静水力曲线图。
(1)线面面积Aw⑵漂心纵向坐标Xf⑶每厘米吃水吨数TPC⑷水线面系数⑸排水体积V⑹排水量W(附体系数取1.006)⑺浮心纵向坐标⑻浮心垂向坐标⑼横稳心垂向坐标⑽纵稳心垂向坐标⑾每厘米纵倾力矩曲线⑿方形系数计算以下各吃水:1m, 2m , 3m, 4m, 5m, 6m2.计算(1)水线面面积计算原理 20222ln l i l Aw ydx yi n ε-=⎡⎤==-⎢⎥⎣⎦∑⎰其中()012n y y ε=+(2)漂心纵向坐标 2'2'22L L i ioy F L w i L xydx k y M x L A y ydz δ--==≈⎰∑∑⎰(3)每厘米吃水吨数(ω=1.025tf/m)(4)水线面系数LBAwCwp =(5)排水体积20022L d d L w A dz ydxdz -∇==⎰⎰⎰ (6)排水量 k k ωω∆=∇=∇ω=1.025tf/m K=1.006(7)浮心纵向坐标 00ii d F w yOzB d w x A dzM x A dz ==∇⎰⎰100wA TPC ω=(8)浮心垂向坐标00i i d W xOy B d w zA dz M z A dz ==∇⎰⎰ (9)横稳心垂向坐标 M Bz MK MB BK MB z ==+=+(10)纵稳心垂向坐标 ML L L L Bz M K M B BK M B z ==+=+222222L L w FL w F LF L x ydx A x I A x I M B ---===∇∇∇⎰(11)每厘米纵倾力矩曲线 100100L L GM BM MTC L L ∆∆=≈∇-=∇-=∇=⎰-222222L L F W F W L LF L x A ydx x x A I I BM(12)方形系数 B C LBd ∇=3.所得值如下表,图如下水线 0m 1m 2m 3m 4m 5m 6m Aw638.842 970.581 1074.470 1141.407 1204.143 1351.127 1487.448 Xf2.7393.947 3.706 3.167 2.149 2.2294.727 TPC9.948 11.013 11.699 12.342 13.849 15.246 Cwp0.747 0.827 0.878 0.927 1.040 1.145 V804.711 1827.237 2935.176 4107.951 5385.586 6804.873 W829.778 1884.155 3026.606 4235.913 5553.347 7016.845 Xb4.555 4.144 3.874 3.523 3.207 3.276 Zb0.603 1.119 1.646 2.179 2.737 3.318 Zm15.670 8.728 6.735 6.032 5.948 6.211 Zml558.442 307.241 220.195 179.022 178.672 169.320 MTC52.009 64.807 74.322 84.168 109.779 130.877 CB0.113 0.256 0.411 0.575 0.754 0.952三.装载稳性计算要求: 计算载况:满载出港(重量W=5519.52t ,重心Xg=-0.85m, Zg=5.02m) 计算内容:浮态及初稳性静稳性曲线及动稳性曲线稳性校核(注:自由液面修正及进水角暂不考虑)已知:受风面积=360m^2受风面积形心距水线高=3.65m稳性插值曲线航区:近海1.计算浮态和稳性已知重量W=5519.52t,则排水量为5519.52t.。
利用静水力曲线图,如下主要尺度: 船长L(m) 89.000 型宽B(m) 14.600 型深D(m) 7.000 吃水d(m) 5.500可求出浮态和稳性,如下表: 项目 单位 符号及公式满载出港 排水量 t Δ 5519.52 平均吃水 m d 4.976 重心纵向坐标 m Xg -0.85 浮心纵向坐标 m Xb 3.21 重心竖向坐标 m Zg 5.02 纵稳心距基线高 m Zml238.23纵向初稳心高 m233.21每厘米纵倾力矩 t·m144.63 漂心纵向坐标 m Xf -2.21 纵倾力臂 m Xg-Xb-4.06纵倾力矩 t·m -22409.25纵倾值 m -1.55首吃水增量 m-0.81尾吃水增量 m0.74首吃水 m4.16 尾吃水 m dd d d A +=5.71 横稳心距基线高 m Zm5.95初稳心高m0.932.(1)静稳性曲线由已给出的稳性横截曲线图,可求得Ls 与V 的关系,由公式φsin G s z l l -=可计算各倾角下的复原力臂l ,并绘制该排水量下的静稳性曲线()φf l =。
(2)动稳性曲线动稳性曲线是静稳性曲线的积分曲线,由公式⎰=φφld l d可求得()φf l d =的关系,绘制动稳性曲线。
(3)列表及绘图角度 ls L Ld 5 0.531 0.094 0.004 10 1.065 0.194 0.016 15 1.604 0.305 0.038 20 2.115 0.399 0.067 25 2.608 0.486 0.103 30 3.102 0.592 0.144 35 3.574 0.694 0.192 40 3.989 0.762 0.242 50 4.567 0.722 0.334 60 4.892 0.544 0.397 70 5.015 0.298 0.428 80 4.952 0.009 0.435 904.741-0.2790.4333.稳性校核a.稳性衡准数K 是对船舶稳性的重要基本要求之一。