ANSYS中的超单元解析
ANSYS中单元类型介绍和单元的选择原则
ANSYS中单元类型介绍和单元的选择原则ANSYS中单元类型的选择:初学ANSYS的人,通常会被ANSYS所提供的众多纷繁复杂的单元类型弄花了眼,如何选择正确的单元类型,也是新手学习时很头疼的问题。
单元类型的选择,跟你要解决的问题本身密切相关。
在选择单元类型前,首先你要对问题本身有非常明确的认识,然后,对于每一种单元类型,每个节点有多少个自由度,它包含哪些特性,能够在哪些条件下使用,在ANSYS的帮助文档中都有非常详细的描述,要结合自己的问题,对照帮助文档里面的单元描述来选择恰当的单元类型。
1.该选杆单元(Link)还是梁单元(Beam)?这个比较容易理解。
杆单元只能承受沿着杆件方向的拉力或者压力,杆单元不能承受弯矩,这是杆单元的基本特点。
梁单元则既可以承受拉,压,还可以承受弯矩。
如果你的结构中要承受弯矩,肯定不能选杆单元。
对于梁单元,常用的有beam3,beam4,beam188这三种,他们的区别在于:1)beam3是2D的梁单元,只能解决2维的问题。
2)beam4是3D的梁单元,可以解决3维的空间梁问题。
3)beam188是3D梁单元,可以根据需要自定义梁的截面形状。
2.对于薄壁结构,是选实体单元还是壳单元?对于薄壁结构,最好是选用shell单元,shell单元可以减少计算量,如果你非要用实体单元,也是可以的,但是这样计算量就大大增加了。
而且,如果选实体单元,薄壁结构承受弯矩的时候,如果在厚度方向的单元层数太少,有时候计算结果误差比较大,反而不如shell单元计算准确。
实际工程中常用的shell单元有shell63,shell93。
shell63是四节点的shell单元(可以退化为三角形),shell93是带中间节点的四边形shell单元(可以退化为三角形),shell93单元由于带有中间节点,计算精度比shell63更高,但是由于节点数目比shell63多,计算量会增大。
对于一般的问题,选用shell63就足够了。
ANSYS高级分析-子结构
1 引言在ANSYS平台上,所谓子结构技术就是将一组单元用矩阵凝聚为一个单元过程的技术,切吧这个单一的矩阵单元称为超单元。
在ANSYS分析中,超单元可以象其他单元类型一样使用。
唯一的区别就是必须先进行结构生成分析以生成能够利用的超单元。
但子结构并非在所有ANSYS模块中都能利用,目前ANSYS子结构技术可以在ANSYS/Mutiphysics,ANSYS/Mechanical和ANSYS/Structural中使用。
在ANSYS平台上,使用子结构的目的主要是为了节省机时,并且允许在比较有限的计算机设备资源的基础上求解超大规模的问题。
比如进行非线性分析和带有大量重复几何结构的分析。
在非线性分析中,可以将模型线性部分作成子结构,这部分的单元矩阵就不用在非线性迭代过程中重复计算。
而在有重复几何结构的模型中(如有四条腿的桌子),可以对于重复的部分生成超单元,然后将它拷贝到不同的位置,这样做可以节省大量的计算时间和计算机资源。
子结构还用于模型有大转动的情况下。
对于这些模型,ANSYS假定每个结构都是围绕其质心转动的。
在三维情况下,子结构有三个转动自由度和三个平动自由度。
在大转动模型中,用户在使用部分之前无须对子结构施加约束,因为每个子结构都是作为一个单元进行处理,是允许刚体位移的。
对于大型三维问题的分析而言,需用磁盘空间相对于一个普通计算机系统来说太庞大了,在这种情况下,用户可以通过子结构将问题分块进行分析,从而使得每一块对于计算机系统来说都是可以计算和承受的。
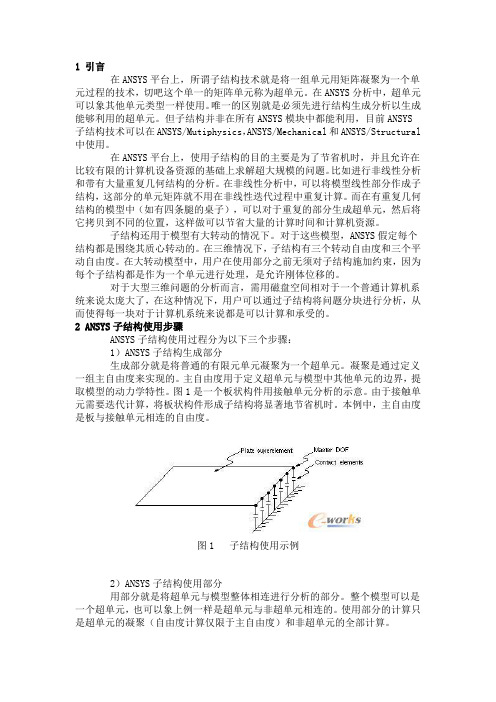
2 ANSYS子结构使用步骤ANSYS子结构使用过程分为以下三个步骤:1)ANSYS子结构生成部分生成部分就是将普通的有限元单元凝聚为一个超单元。
凝聚是通过定义一组主自由度来实现的。
主自由度用于定义超单元与模型中其他单元的边界,提取模型的动力学特性。
图1是一个板状构件用接触单元分析的示意。
由于接触单元需要迭代计算,将板状构件形成子结构将显著地节省机时。
ANSYS中的超单元

ANSYS 中的超单元摘自htbbzzg的博客,网易从 8.0 版开始,ANSYS 中增加了超单元功能,本文通过一些实际例子,探讨了 ANSYS 中超单元的具体使用。
1. 使用超单元进行静力分析根据 ANSYS 帮助文件,使用超单元的过程可以划分为三个阶段 (称为 Pass):(1) 生成超单元模型 (Generation Pass)(2) 使用超单元数据 (Use Pass)(3) 扩展模型 (Expansion Pass)下面以一个例子加以说明:一块板,尺寸为 20×40×2,材料为钢,一端固支,另一端承受法向载荷。
首先生成原始模型 se_all.db,即按照整个结构进行分析,以便后面与超单元结果进行比较:首先生成两个矩形,尺寸各为 20×2。
然后定义单元类型 shell63;定义实常数 1 为: 2 (板厚度)。
材料性能:弹性模量 E=201000;波松比μ=0.3;密度ρ=7.8e-9;单位为 mm-s-N-MPa。
采用边长 1 划分单元;一端设置位移约束 all,另一端所有 (21 个) 节点各承受 Z 向力 5。
计算模型如下图:静力分析的计算结果如下:为了后面比较的方便,分别给出两个 area 上的结果:超单元部分,按照上述步骤操作如下:(1) 生成超单元选择后半段作为超单元,前半段作为非超单元(主单元)。
按照 ANSYS 使用超单元的要求,超单元与非超单元部分的界面节点必须一致 (重合),且最好分别的节点编号也相同,否则需要分别对各节点对建立耦合方程,操作比较麻烦。
实际上,利用 ANSYS 中提供的 mesh200 单元,对超单元和非超单元的界面实体,按照同一顺序,先于所有其它实体划分单元,很容易满足界面节点编号相同的要求。
对于多级超单元的情况,则还要结合其它操作 (如偏移节点号等) 以满足这一要求。
对于本例,采用另一办法,即先建立整个模型,然后再划分超单元和非超单元。
ansys子结构分析实例解析

ANSYS中的超单元从8.0版开始,ANSYS中增加了超单元功能,本文通过一些实际例子,探讨了ANSYS 中超单元的具体使用。
1 使用超单元进行静力分析根据ANSYS帮助文件,使用超单元的过程可以划分为三个阶段(称为Pass):(1) 生成超单元模型(Generation Pass)(2) 使用超单元数据(Use Pass)(3) 扩展模型(Expansion Pass)以下摘自htbbzzg邹老师博客,请勿乱传!下面以一个例子加以说明:一块板,尺寸为20×40×2,材料为钢,一端固支,另一端承受法向载荷。
首先生成原始模型se_all.db,即按照整个结构进行分析,以便后面与超单元结果进行比较:首先生成两个矩形,尺寸各为20×2。
然后定义单元类型shell63;定义实常数1为: 2 (板厚度)。
材料性能:弹性模量E=201000;波松比μ=0.3;密度ρ=7.8e-9;单位为mm-s-N-MPa。
采用边长1划分单元;一端设置位移约束all,另一端所有(21个)节点各承受Z向力5。
计算模型如下图:静力分析的计算结果如下:为了后面比较的方便,分别给出两个area上的结果:超单元部分,按照上述步骤操作如下:(1) 生成超单元选择后半段作为超单元,前半段作为非超单元(主单元)。
按照ANSYS使用超单元的要求,超单元与非超单元部分的界面节点必须一致(重合),且最好分别的节点编号也相同,否则需要分别对各节点对建立耦合方程,操作比较麻烦。
实际上,利用ANSYS中提供的mesh200单元,对超单元和非超单元的界面实体,按照同一顺序,先于所有其它实体划分单元,很容易满足界面节点编号相同的要求。
对于多级超单元的情况,则还要结合其它操作(如偏移节点号等)以满足这一要求。
对于本例,采用另一办法,即先建立整个模型,然后再划分超单元和非超单元。
即:将上述模型分别存为se_1.db (超单元部分)和se_main.db (非超单元部分)两个文件,然后分别处理。
ANSYS中的超单元解析

ANSYS 中的超单元摘自htbbzzg的博客,网易从 8.0 版开始,ANSYS 中增加了超单元功能,本文通过一些实际例子,探讨了 ANSYS 中超单元的具体使用。
1.使用超单元进行静力分析根据 ANSYS 帮助文件,使用超单元的过程可以划分为三个阶段 (称为Pass):(1) 生成超单元模型 (Generation Pass)(2) 使用超单元数据 (Use Pass)(3) 扩展模型 (Expansion Pass)下面以一个例子加以说明:一块板,尺寸为 20×40×2,材料为钢,一端固支,另一端承受法向载荷。
首先生成原始模型 se_all.db,即按照整个结构进行分析,以便后面与超单元结果进行比较:首先生成两个矩形,尺寸各为 20×2。
然后定义单元类型 shell63;定义实常数 1 为: 2 (板厚度)。
材料性能:弹性模量 E=201000;波松比μ=0.3;密度ρ=7.8e-9;单位为 mm-s-N-MPa。
采用边长 1 划分单元;一端设置位移约束 all,另一端所有 (21 个) 节点各承受 Z 向力 5。
计算模型如下图:an dAl l t h i n g s i n t h e i r b e i n g a re go od fo r静力分析的计算结果如下:为了后面比较的方便,分别给出两个 area 上的结果:超单元部分,按照上述步骤操作如下:(1) 生成超单元选择后半段作为超单元,前半段作为非超单元(主单元)。
按照 ANSYS 使用超单元的要求,超单元与非超单元部分的界面节点必须一致 (重合),且最好分别的节点编号也相同,否则需要分别对各节点对建立耦合方程,操作比较麻烦。
实际上,利用 ANSYS 中提供的 mesh200 单元,对超单元和非超单元的界面实体,按照同一顺序,先于所有其它实体划分单元,很容易满足界面节点编号相同的要求。
对于多级超单元的情况,则还要结合其它操作 (如偏移节点号等) 以满足这一要求。
Ansys 单元介绍

ANSYS单元类型选择方法2009-04-10 11:01最近在学习ANSYS,收集到一些资料,跟大家分享一下:还有心得体会将在后面写出来跟同行们交流!下面是有关ANSYS分析中的单元选择方法:一、单元类型选择概述:ANSYS的单元库提供了100多种单元类型,单元类型选择的工作就是将单元的选择范围缩小到少数几个单元上;单元类型选择方法:1.设定物理场过滤菜单,将单元全集缩小到该物理场涉及的单元;二、单元类型选择方法(续一)2.根据模型的几何形状选定单元的大类,如线性结构则只能用“Plane、Shell”这种单元去模拟;3.根据模型结构的空间维数细化单元的类别,如确定为“Beam”单元大类之后,在对话框的右栏中,有2D 和3D的单元分类,则根据结构的维数继续缩小单元类型选择的范围;三、单元类型选择方法(续二)4.确定单元的大类之后,又是也可以根据单元的阶次来细分单元的小类,如确定为“Solid-Quad”,此时有四种单元类型:Quad 4node 42 Quad 4node 183 Quad 8node 82 Quad 8node 183 前两组即为低阶单元,后两组为高阶单元;四、单元类型选择方法(续三)5.根据单元的形状细分单元的小类,如对三维实体,此时则可以根据单元形状是“六面体”还是“四面体”,确定单元类型为“Brick”还是“Tet”;五、单元类型选择方法(续四)6.根据分析问题的性质选择单元类型,如确定为2D的Beam单元后,此时有三种单元类型可供选择,如下:2D elastic 3 2Dplastic 23 2D tapered 54,根据分析问题是弹性还是塑性确定为“Beam3”或“Beam4”,若是变截面的非对称的问题则用“Beam54”。
六、单元类型选择方法(续五)7.进行完前面的选择工作,单元类型就基本上已经定位在2-3种单元类型上了,接下来打开这几种单元的帮助手册,进行以下工作:仔细阅读其单元描述,检查是否与分析问题的背景吻合、了解单元所需输入的参数、单元关键项和载荷考虑;了解单元的输出数据;仔细阅读单元使用限制和说明。
ansys高级非线性分析-第六章_超弹性解读
September 30, 2001 Inventory #001491 6-7
超弹性
... 延伸率的定义
Training Manual
Advanced Structural Nonlinearities 6.0
• 举例说明主延伸率的定义, 考虑一个薄正方形橡胶薄板进行双向拉 伸,主延伸率 l1 和 l2 描述了平面内变形特征,另一方面, l3 定义 厚度变化 (t/to),另外, 若材料假设为完全不可压缩, 则 l3 等于l-2.
Training Manual
Advanced Structural Nonlinearities 6.0
• 由于材料的不可压缩性, 把应变能函数分解为偏差项(下标d 或‘bar’ )和体积项(下标b),结果, 体积项仅为体积比J 的函数。
W Wd I1 , I 2 Wb J
W Wd l1 , l2 , l3 Wb J
– 与塑性不同, 超弹性不定义为速率公式
D :
– 相反, 总应力与总应变的关系由应变能势 (W)来定义。
September 30, 2001 Inventory #001491 6-6
超弹性
... 延伸率的定义
详细讨论应变能势的不同形式之前,先定义一些术语: • 延伸率(或只是‘延伸’) 定义为:
l2 l L L o
l3 t t l2 o
l1 l L L o
September 30, 2001 Inventory #001491 6-8
超弹性
... 应变不变量的定义
• 三个应变不变量一般用于定义应变能密度函数。
2 2 I1 l1 l2 l 2 3 2 2 2 2 2 I 2 l1 l2 l2 l l 2 3 3 l1 2 2 2 I 3 l1 l2 l3
matrix50
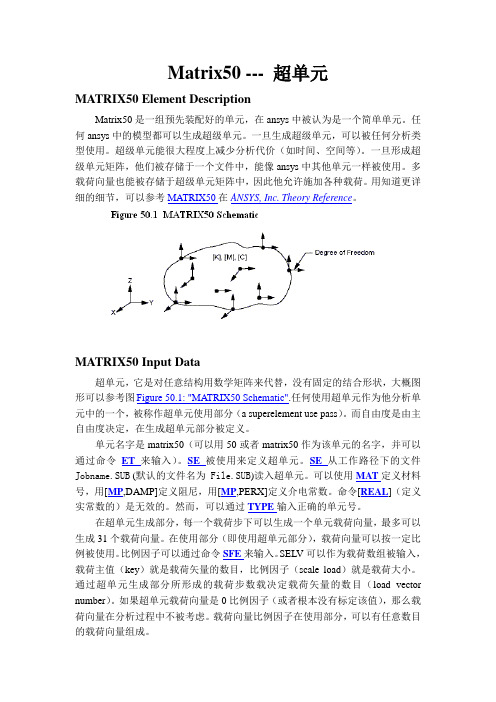
Matrix50 --- 超单元MATRIX50 Element DescriptionMatrix50是一组预先装配好的单元,在ansys中被认为是一个简单单元。
任何ansys中的模型都可以生成超级单元。
一旦生成超级单元,可以被任何分析类型使用。
超级单元能很大程度上减少分析代价(如时间、空间等)。
一旦形成超级单元矩阵,他们被存储于一个文件中,能像ansys中其他单元一样被使用。
多载荷向量也能被存储于超级单元矩阵中,因此他允许施加各种载荷。
用知道更详细的细节,可以参考MATRIX50在ANSYS, Inc. Theory Reference。
MATRIX50 Input Data超单元,它是对任意结构用数学矩阵来代替,没有固定的结合形状,大概图形可以参考图Figure 50.1: "MATRIX50 Schematic".任何使用超单元作为他分析单元中的一个,被称作超单元使用部分(a superelement use pass)。
而自由度是由主自由度决定,在生成超单元部分被定义。
单元名字是matrix50(可以用50或者matrix50作为该单元的名字,并可以通过命令ET来输入)。
SE被使用来定义超单元。
SE从工作路径下的文件Jobname.SUB (默认的文件名为File.SUB)读入超单元。
可以使用MAT定义材料号,用[MP,DAMP]定义阻尼,用[MP,PERX]定义介电常数。
命令[REAL](定义实常数的)是无效的。
然而,可以通过TYPE输入正确的单元号。
在超单元生成部分,每一个载荷步下可以生成一个单元载荷向量,最多可以生成31个载荷向量。
在使用部分(即使用超单元部分),载荷向量可以按一定比例被使用。
比例因子可以通过命令SFE来输入。
SELV可以作为载荷数组被输入,载荷主值(key)就是载荷矢量的数目,比例因子(scale load)就是载荷大小。
通过超单元生成部分所形成的载荷步数载决定载荷矢量的数目(load vector number)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ANSYS 中的超单元摘自htbbzzg的博客,网易从 8.0 版开始,ANSYS 中增加了超单元功能,本文通过一些实际例子,探讨了 ANSYS 中超单元的具体使用。
1. 使用超单元进行静力分析根据 ANSYS 帮助文件,使用超单元的过程可以划分为三个阶段 (称为 Pass):(1) 生成超单元模型 (Generation Pass)(2) 使用超单元数据 (Use Pass)(3) 扩展模型 (Expansion Pass)下面以一个例子加以说明:一块板,尺寸为 20×40×2,材料为钢,一端固支,另一端承受法向载荷。
首先生成原始模型 se_all.db,即按照整个结构进行分析,以便后面与超单元结果进行比较:首先生成两个矩形,尺寸各为 20×2。
然后定义单元类型 shell63;定义实常数 1 为: 2 (板厚度)。
材料性能:弹性模量 E=201000;波松比μ=0.3;密度ρ=7.8e-9;单位为 mm-s-N-MPa。
采用边长 1 划分单元;一端设置位移约束 all,另一端所有 (21 个) 节点各承受 Z 向力 5。
计算模型如下图:静力分析的计算结果如下:为了后面比较的方便,分别给出两个 area 上的结果:超单元部分,按照上述步骤操作如下:(1) 生成超单元选择后半段作为超单元,前半段作为非超单元(主单元)。
按照 ANSYS 使用超单元的要求,超单元与非超单元部分的界面节点必须一致 (重合),且最好分别的节点编号也相同,否则需要分别对各节点对建立耦合方程,操作比较麻烦。
实际上,利用 ANSYS 中提供的 mesh200 单元,对超单元和非超单元的界面实体,按照同一顺序,先于所有其它实体划分单元,很容易满足界面节点编号相同的要求。
对于多级超单元的情况,则还要结合其它操作 (如偏移节点号等) 以满足这一要求。
对于本例,采用另一办法,即先建立整个模型,然后再划分超单元和非超单元。
即:将上述模型分别存为 se_1.db (超单元部分) 和 se_main.db (非超单元部分) 两个文件,然后分别处理。
对于 se_1.db 模型,按照超单元方式进行处理。
由于模型及边界条件已建立,只需删除前半段上的划分,结果就是超单元所需的模型。
然后直接进入创建超单元矩阵的操作,首先说明一下创建超单元矩阵的一般步骤:A 进入求解模块:命令:/SoluGUI:Main menu -> SolutionB 设置分析类型为“子结构或部件模态综合“命令:ANTYPEGUI :Main menu -> Solution -> Analysis Type -> New Analysis选择 Substructuring/CMS (子结构或部件模态综合)C 设置子结构选项命令:SEOPTGUI: Main menu -> Solution -> Analysis Type -> Analysis Options设置内容有:方程求解方法 (波前法–默认,或稀疏矩阵法–推荐);要求生成的矩阵,可以是:刚度矩阵;刚度和质量矩阵;刚度、质量和阻尼矩阵 (稀疏矩阵法不能生成阻尼矩阵);要求输出到 output 窗口的矩阵 (矩阵和载荷矢量或仅输出载荷矢量,默认不输出) ;扩展超单元的方法 (后续操作时,对本超单元扩展时使用的方法),默认是回代法(backsubstitution method),需要存储主自由度的三角矩阵 (波前法为 sebname.tri,稀疏矩阵法为 sename.LNxx);完全求解方法 (Full resolve method 不存储任何三角矩阵)。
随着问题规模加大,三角矩阵可能很大;完全求解方法不需要三角矩阵,但花费时间较长,且不能重启动子结构分析 (对于不同的载荷矢量)。
质量矩阵公式:是否使用集中质量矩阵,推荐用一致质量矩阵。
D 选择主自由度命令:MGUI: Main menu -> Solution -> Master DOFs -> User Selected -> Define 主自由度是超单元和其它单元之间的界面,必须确保将超单元与其它单元的界面上的所有节点自由度定义为主自由度。
假如模型中除了超单元外没有其它单元,也必须定义主自由度。
在将超单元用于动力分析时,主自由度的动力特性应能代表超单元的动力特性。
对于在使用超单元时将被定义为约束或施加载荷的节点,应该定义为主自由度 (如果它们也位于当前的超单元中)。
对于大挠度问题或使用 SETRAN 命令的情况,主节点的 6 个自由度都应作为主自由度。
本例中选择超单元外端面上所有节点的所有自由度作为主自由度。
一般情况均推荐选择相应主节点的 All 自由度。
E 在超单元上施加载荷作为超单元的结构可以施加任意载荷,但要记住:程序会生成一个载荷矢量,其中包含了施加的所有载荷。
对于每个载荷步,在超单元文件中写一个等效的载荷矢量,最多可以写 31 个载荷矢量。
在超单元结构中可以使用非零位移约束,并作为载荷矢量的一部分。
求解后对超单元进行结果扩展时,对于有非零位移的载荷步,其数据库必须匹配,否则需再次施加非零位移约束后再进行结果扩展。
可以在使用超单元时再定义载荷和约束,此时应注意将相应节点选为主自由度节点。
同样也可以在使用超单元时再定义惯性力 (加速度或角速度),但在超单元部分要生成质量矩阵。
如果在使用超单元时需要对其进行旋转,推荐这样做,因为超单元的载荷矢量是随着超单元一起转动的。
注意:如果生成质量矩阵,推荐在使用超单元时再施加约束,但要注意将约束节点选为主自由度。
如果要施加加速度载荷,建议再生成超单元时施加,而不要施加到简缩的质量矩阵上。
对于有大转动的问题,推荐在使用超单元时再施加约束。
F 设置载荷步选项在生成超单元的阶段,唯一有效的载荷步选项是设置阻尼。
以上内容设置完毕,存储模型并求解。
对于本例,首先选择新的求解类型:设置分析选项:定义主自由度:然后将模型存盘并求解。
求解后将生成超单元文件 se_1.sub。
(2) 使用超单元使用超单元的过程是:A 建立新模型对于本例,将se_1.db 文件存盘,点击File -> Clear & Start New ... 菜单项,修改Jobname 为se_main,,Resume 模型。
此时读入的模型仍是个完整的模型,在前处理的 Mesh 下,清除后半段 area 上的网格,只保留前半段area 上的网格 (以及已经施加的节点 Z 向载荷向载荷)。
图 10 非超单元部分的模型为了使用超单元,除了其它单元类型外,还需要定义单元类型Matrix50 (超单元)。
图 11 定义超单元类型在对非超单元部分建模时,必须确保其界面节点与超单元模型的界面节点精确匹配且最好节点编号也完全一致,否则需要偏移节点编号或在超单元节点和非超单元节点之间建立耦合,或由老的超单元模型创建一个新的超单元模型(SETRAN 命令),其界面节点与非超单元模型相匹配。
对于本例,由于非超单元模型与超单元模型都是由同一个整体模型修改而来,故其界面节点的位置和编号都是完全相同的。
B 读入超单元矩阵首先设置单元属性为Superelement:命令:命令:TypeGUI: Main menu -> Preprocessor -> Modeling -> Create -> Elements -> Elem Attributes -> Type -> Superelements图 12 定义单元属性为超单元然后读入超单元矩阵se_1.sub:命令:命令:SEGUI: Main menu -> Preprocessor -> Modeling -> Create -> Elements -> Superelements -> From .SUB File读入se_1.sub 文件,自动与非超单元部分组装到一起。
可以通过Utility 菜单的 List -> Other -> Superelem Data 列出超单元 se_1 的数据:现在应该施加超单元载荷,然后将模型存盘并求解 (一般的静力求解)。
求解后存盘,再进行后处理:(3) 将结果扩展到超单元部分如果在生成超单元阶段产生的.EMAT、、.ESAV、.SUB、、.TRI、.DB、以及.SEID 文件,和使用该超单元的模型求解时生成的 .DSUB 文件都是可用的,则可以将结果扩展到超单元部分。
清除当前模型,将Jobname 改为超单元模型文件名(se_1),读入超单元模型,转换为Solution 模块,激活 ExpansionPass:命令:命令:EXPASSGUI: Main Menu -> Solution -> Analysis Type -> Expansion Pass在 EXPASS 表单中,设置: ExpansionPass -> ON然后读取超单元矩阵 .SUB 、以及非超单元模型求解时,为使用的超单元模型生成的数据文件.DSUB:命令命令: SEEXPGUI: Main Menu -> Solution -> Load Step Opts -> Single Expand-> Expand Superelements然后在SEEXP 表单中分别输入超单元文件的 .sub 文件名和使用该超单元的主结构在求解时生成的.dsub 文件名:然后进行求解 -> solve,求解完毕,可以到后处理查看计算结果。
注意此时并不生成.rst 文件,但可以直接查看计算结果。
对于超单元部分,相应的位移和 Von Mises 应力云图分别见图 18 和图 19。
如果存在完整的结构模型 (例如 se_all.db),则可以显示整个结构的结果,具体操作方法是:在将 Jobname 改为 se_1 后,不是读取其本身,而是 Resume se_all.db,然后只选择超单元部分的单元和节点,并按照前面相同的办法对结果进行扩展。
结果扩展完成后,显示整个结构的单元和节点,然后进行后处理。
进入 Post1 后,首先执行:Data & File Opts -> Read Single Result File -> 选择se_1.rst;再点击 Read Result -> First,从 se_1.rst 中读取结果。
然后执行:Data & File Opts -> Read Single Result File -> 选择 se_2.rst;再点击Read Result -> First,从 se_2.rst 中读取结果。